 電子發(fā)燒友App
電子發(fā)燒友App


?
導(dǎo)言
在全球范圍內(nèi),越來越多的智能出行解決方案憑借可靠的定位技術(shù)可更好地應(yīng)用于城市道路,精準(zhǔn)的定位技術(shù)正在重塑傳統(tǒng)的出行市場,例如租車、車隊管理和車輛保險,以及其他共享單車、網(wǎng)約車和道路計程收費的新型應(yīng)用。
?
針對這些普及速度最為迅猛的應(yīng)用市場,精準(zhǔn)定位解決方案遭遇了更為嚴(yán)峻的挑戰(zhàn)。
在建筑密集的城市中,車輛在進(jìn)入城市峽谷、橋底、隧道或多層停車場等復(fù)雜環(huán)境中時,常常無法獲取全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號,導(dǎo)致定位系統(tǒng)無法正常工作。
即使車輛上空并無遮擋物,GNSS接收機(jī)仍有可能接收到其他間接信號(例如建筑反射的信號),而這對位置估計也會產(chǎn)生不利影響。
?
定位的失準(zhǔn)和中斷會影響服務(wù)質(zhì)量、運營效率、賬務(wù)及合規(guī)性監(jiān)控,因而對企業(yè)十分不利。因此,越來越多的企業(yè)轉(zhuǎn)而尋求能夠解決這些痛點的定位解決方案,即采用慣性導(dǎo)航技術(shù)。
?
Q A &
什么是慣性導(dǎo)航解決方案?
慣性導(dǎo)航(DR)解決方案采用慣性傳感器(陀螺儀和加速計)來輔助GNSS定位技術(shù)。
無約束慣性導(dǎo)航(UDR)解決方案持續(xù)測量與監(jiān)測車輛加速度及其方向變化,再通過傳感器融合技術(shù)將測量數(shù)據(jù)與GNSS數(shù)據(jù)進(jìn)行整合,實時計算并優(yōu)化分析出更精準(zhǔn)的位置結(jié)果。
車載慣性導(dǎo)航(ADR)解決方案在此基礎(chǔ)上則更進(jìn)一步,可將車輛輪速脈沖傳感器的數(shù)據(jù)進(jìn)行整合,實現(xiàn)更高精度的位置計算結(jié)果。
慣性導(dǎo)航技術(shù)的三大優(yōu)勢:
在城市場景中,定位精度可提高至原來的三倍
在GNSS信號中斷后仍能繼續(xù)實現(xiàn)位置追蹤
車輛啟動后即開始位置追蹤和導(dǎo)航
在本文中,我們將分析并消除有關(guān)慣性導(dǎo)航的7大誤解。
?
誤解一
ADR(車載慣導(dǎo))僅適用于汽車應(yīng)用
實際上:ADR解決方案除了將GNSS與慣性傳感器數(shù)據(jù)進(jìn)行融合,還會從硬件輪速脈沖傳感器獲取車速信息,或者接收來自軟件接口的消息。
經(jīng)過多年的發(fā)展,ADR技術(shù)現(xiàn)在可應(yīng)用于多種車輛,例如我們新型慣性導(dǎo)航模塊就包含適用于汽車、摩托車和電動踏板車的動態(tài)模型。
?
?
誤解二
只有在GNSS信號完全丟失時才會用到慣導(dǎo)技術(shù)
實際上:除了彌補(bǔ)GNSS信號覆蓋盲區(qū),慣性導(dǎo)航解決方案還可以支持各種復(fù)雜場景中的定位解決方案:
慣性導(dǎo)航解決方案通過提供相對定位補(bǔ)充來源,可以減少城市峽谷中多徑效應(yīng)引起的定位誤差。
慣性導(dǎo)航解決方案可以幫助檢測GNSS干擾和欺騙,并減輕由此帶來的影響誤差。
在定位暫時丟失的情況下,慣性導(dǎo)航解決方案有助于控制定位誤差。
?
誤解三
隨著雙頻GNSS技術(shù)的發(fā)展,慣性導(dǎo)航已無價值
實際上:雙頻GNSS接收機(jī)在特定條件下確實可以改善定位精度。但即便如此,在GNSS信號中斷時,雙頻GNSS也無法持續(xù)進(jìn)行精準(zhǔn)定位,這時就需要慣導(dǎo)技術(shù)進(jìn)行輔助定位,確保定位服務(wù)可實現(xiàn)100%可用。
?
誤解四
慣性導(dǎo)航成本高,作用小
實際上:慣性導(dǎo)航解決方案雖然標(biāo)價略高(通常在成本基礎(chǔ)上加成不到50%),但從開始部署到整個車輛生命周期結(jié)束,始終都能帶來回報。
在高度依賴精準(zhǔn)車輛追蹤來計費的計程類應(yīng)用場景中,DR技術(shù)可確保在GNSS服務(wù)中斷后仍能繼續(xù)追蹤里程數(shù)。而針對精準(zhǔn)定位數(shù)據(jù)有助于提高運營效率的場景中(例如,找到并收回亂放的電動踏板車),DR技術(shù)還能有效節(jié)約時間和能源。
?
?
誤解五
慣性導(dǎo)航難以部署
實際上:這種說法其實也有一定的道理,但實際情況并不能這樣一言概之。雖然多星多頻GNSS接收機(jī)能夠在一定程度上提高定位性能,但安裝部署的難度也會因此而上升,慣性導(dǎo)航解決方案也是如此。
為了帶來更可靠的性能,慣性導(dǎo)航接收機(jī)的校準(zhǔn)工作更需要精確測定和詳細(xì)規(guī)范。此外,ADR解決方案還需連接到車輛的傳感器,以追蹤車輪的轉(zhuǎn)動信息。
根據(jù)應(yīng)用場景的不同,我們會推薦一些方法來簡化安裝過程,例如,與汽車類似的應(yīng)用場景(即四輪車輛)可以使用自動校準(zhǔn)功能。
?
誤解六
慣性導(dǎo)航可以彌補(bǔ)GNSS信號強(qiáng)度弱的問題
實際上:在GNSS信號強(qiáng)度不佳或中斷的情況下,慣性導(dǎo)航確實可以在有限的時間里起到輔助支持和補(bǔ)充作用。
但是,如果系統(tǒng)的信號強(qiáng)度在長時間內(nèi)一直處于欠佳狀態(tài),定位精度必然會受到影響。由于GNSS信號也用于校正慣性傳感器和輪速脈沖傳感器,因此GNSS精度差會降低校正的質(zhì)量,最終導(dǎo)致慣性導(dǎo)航定位精度下降。
為了改善性能,我們需要從根本問題出發(fā)。如果天線布局欠佳,有兩種補(bǔ)救措施:選擇更好的天線和增加PCB鋪地尺寸。
如果使用的是無源天線,可以在設(shè)計中增加LNA,這樣便可解決問題。
?
?
誤解七
無約束慣性導(dǎo)航(UDR)是低端的ADR
實際上:如果有這樣的想法其實也能理解。如果你用ADR作為基準(zhǔn),而沒有將UDR、ADR與僅使用GNSS的解決方案進(jìn)行性能對比,就很容易有這種想法。
我們認(rèn)為這樣想其實有些本末倒置,因為與僅使用GNSS的解決方案相比,UDR和ADR都實現(xiàn)了定位功能升級。而ADR與UDR相比的最大價值在于,ADR可以在信號長時間中斷(持續(xù)時間超過一分鐘)的情況下提高定位精度。
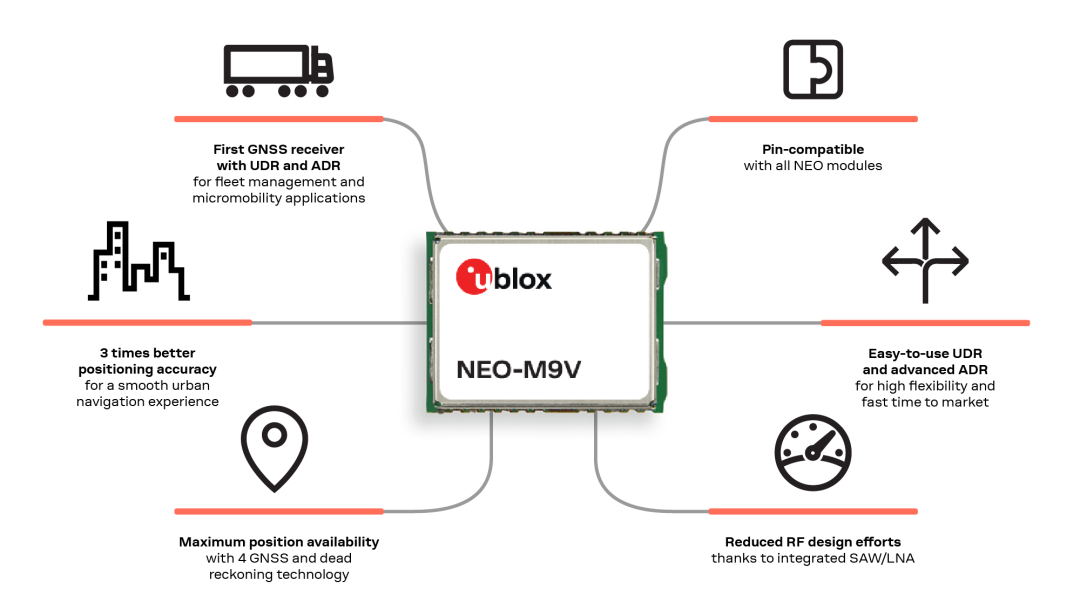
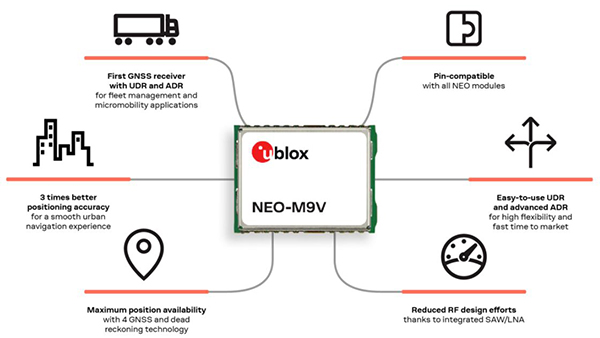
u-blox?NEO-M9V慣性導(dǎo)航模塊(點擊下劃線處了解更多內(nèi)容)可支持開箱即用的UDR和ADR,確保最大靈活性,便于您調(diào)整解決方案架構(gòu),適應(yīng)多種應(yīng)用場景的需求。
?
無論選擇ADR還是UDR,適合您的就是最好的選擇。
隨著城市應(yīng)用場景的擴(kuò)大,用戶對其智能化需求也不斷增加,對定位的容差也越來越低,設(shè)備廠商也正在拓展衛(wèi)星定位與慣性導(dǎo)航技術(shù)的應(yīng)用。
在u-blox,我們針對汽車和工業(yè)應(yīng)用提供行業(yè)領(lǐng)先的慣性導(dǎo)航解決方案組合,并與客戶攜手開發(fā)全新的技術(shù)來推動慣性導(dǎo)航技術(shù)創(chuàng)新。我們在設(shè)計、選型、實施和部署階段,不斷幫助客戶解決技術(shù)痛點,在此過程中我們也取得了持續(xù)性進(jìn)步,憑借多年沉淀的專業(yè)經(jīng)驗,我們將不斷精進(jìn),打造出更可靠、更精準(zhǔn)的定位解決方案。
我們已發(fā)布了u-blox NEO-M9V,作為u-blox首款可同時提供無約束慣性導(dǎo)航(UDR)和車載慣性導(dǎo)航(ADR)的定位接收機(jī),NEO-M9V可作為車隊管理和微出行應(yīng)用的理想選擇,即使在復(fù)雜的GNSS信號環(huán)境(如城市峽谷)中,也能提供可靠的米級定位精度。
該模塊同時集成了UDR和ADR,可以帶來更強(qiáng)的靈活性,所以客戶不必再忙于決定是采用易于集成的UDR技術(shù),還是更為成熟的ADR技術(shù),而是能夠針對終端客戶的具體應(yīng)用場景要求提供最佳解決方案。
?
審核編輯:劉清




















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論