 電子發燒友App
電子發燒友App


對PCB設計者來說,創建原理圖符號庫和PCB封裝庫是十分基礎卻又非常重要的工作。只有確保原理圖符號庫和PCB封裝庫準確無誤,才能保證PCB設計工作得以順利開展。本書系統介紹了原理圖符號與PCB封裝建庫方法和技巧,主要內容包括封裝庫基礎知識、元器件數據手冊封裝參數分析、PCB封裝建庫工程經驗數據、原理圖符號與PCB封裝建庫審查案例、多平臺原理圖符號庫與PCB封裝庫設計、PCB設計文件與封裝庫在多平臺間的轉換、PCB 3D封裝庫的應用、PCB封裝的命名。
1、設計方法
1.1新電控系統和架構核心設計方法
舊的電控系統架構基于分布式和集成式設計方法, 其中每個電控系統都基于AUTOSAR軟件架構設計, 對應的用戶功能基本都在一個系統內完成。而當前隨著用戶需求越來越多, 許多功能都是跨系統的。因此, 從IT行業引入層次化和系統低耦合性。
1.1.1分布式和集成式設計方法
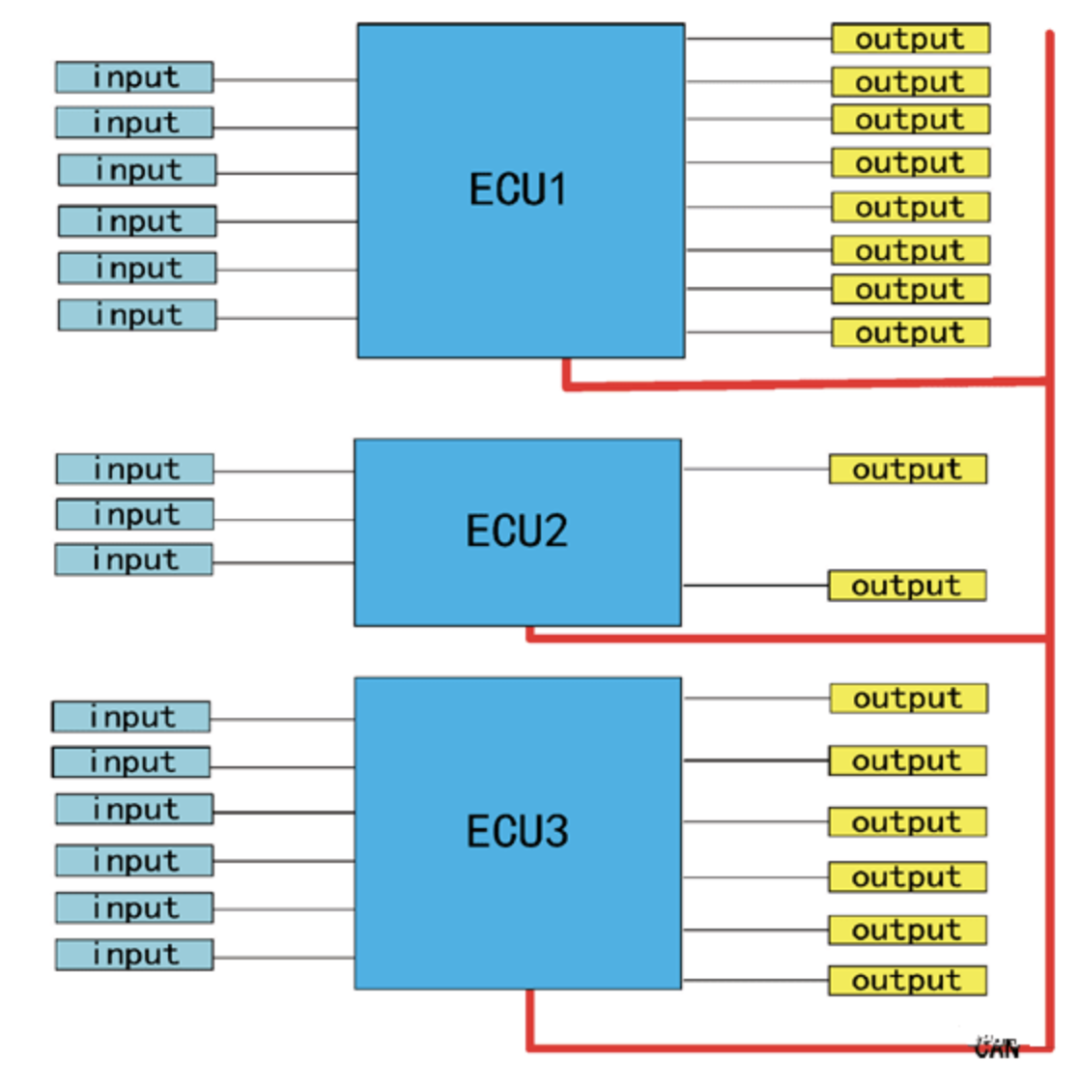
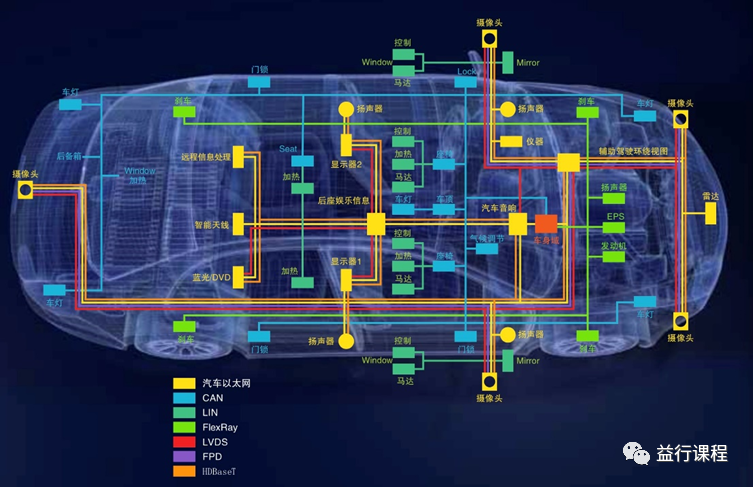
分布式和集成式設計方法的架構方案大致拓撲如圖1所示。這是一種基本上可以不依賴其他系統, 就可以實現功能需求的設計方法。車載電子控制單元(Electronic Control Unit, ECU)都是一個相對獨立的系統, 所有輸入傳感器、輸出執行器和邏輯處理都在一個主ECU控制的系統內完成。這造成整車ECU數量眾多, 難以管理。
1.1.2域控制設計方法
域控制架構拓撲如圖2所示, 主要內容如下:
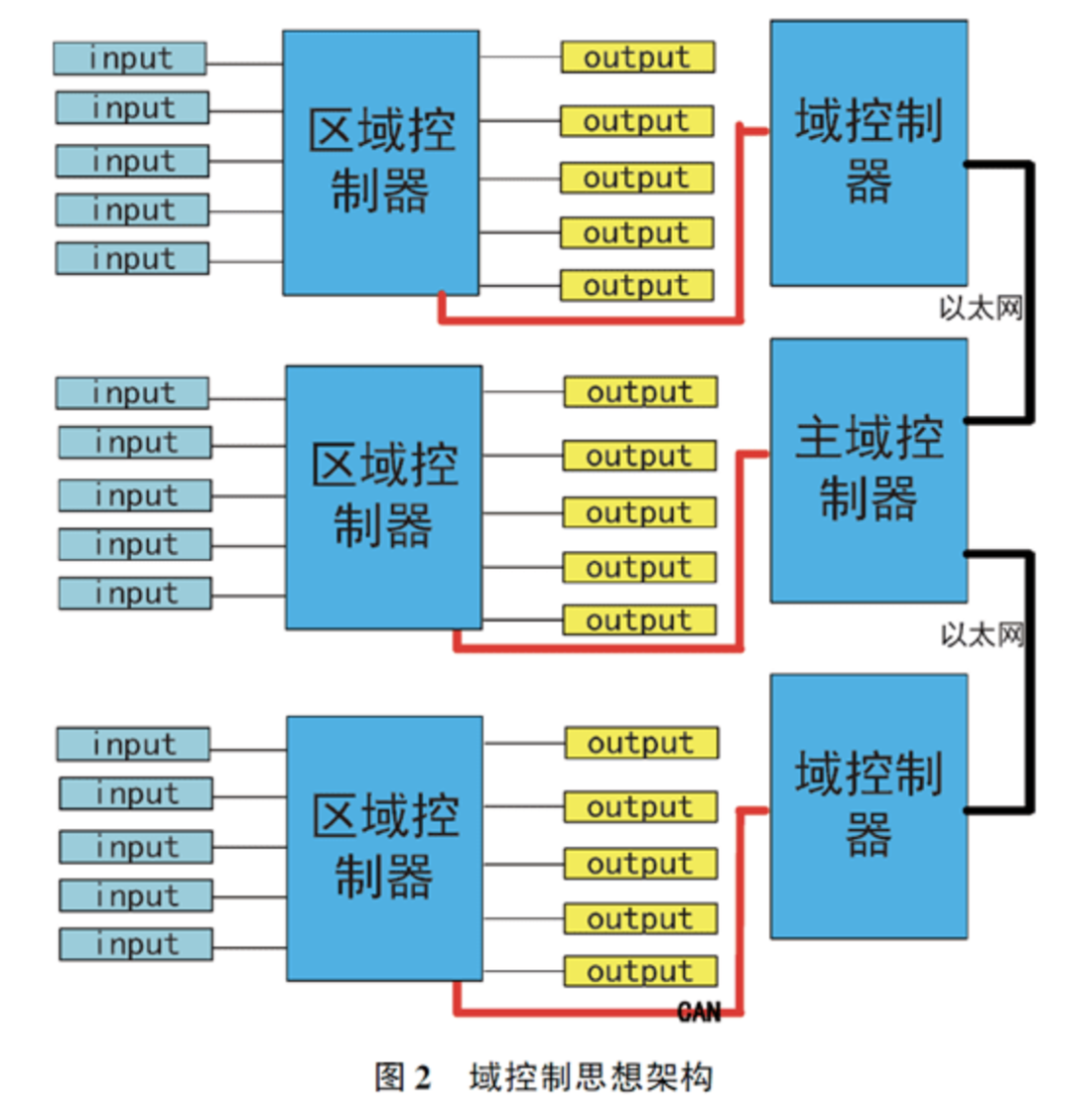
①功能分解:實現功能邏輯與實際的物理硬線信號剝離, 并把功能邏輯集中到一個域控制器實現。
②接口標準化:域控制器與區域控制器信號接口和區域控制器與所有物理信號輸入輸出設備接口。
③區域劃分:整理出所有輸入輸出設備, 并按位置區域進行分配, 接入區域控制器管理。
1.1.3SOA設計方法
SOA是面向對象的服務架構, 本文不做深入探討。車輛接入物聯網后, 可以挖掘出來的各類相關功能應用(Applica-tion, APP), 大大提升用戶服務價值, 而這些應用就是基于SOA思想設計的。這些APP就建立在域控制設計平臺架構之上。由于SOA思想剛剛導入車載系統, 以及當前系統和架構拓展性不足, 目前的APP挖掘不夠多, 功能拓展性也不高。
2、新電控系統和架構設計
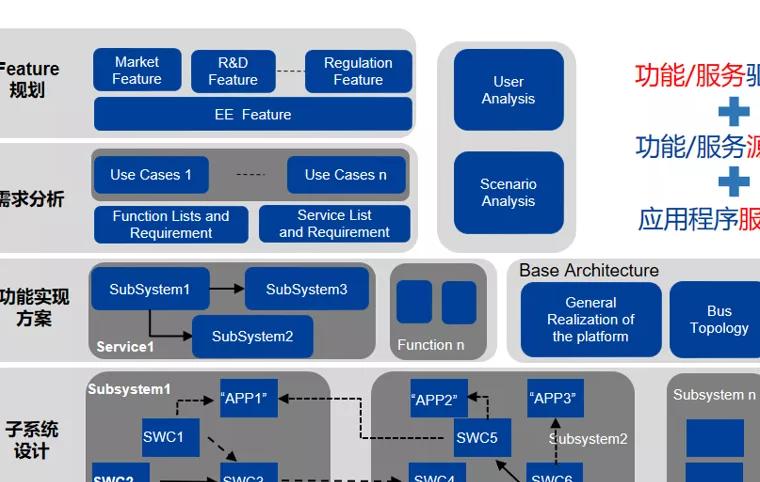
基于對分布和集成式、域控制和SOA設計方法的研究, 以及對當前車聯網和軟件定義汽車需求的分析, 我們歸納出當前車端及關聯系統大致組成元素及層次關系, 如圖3所示。
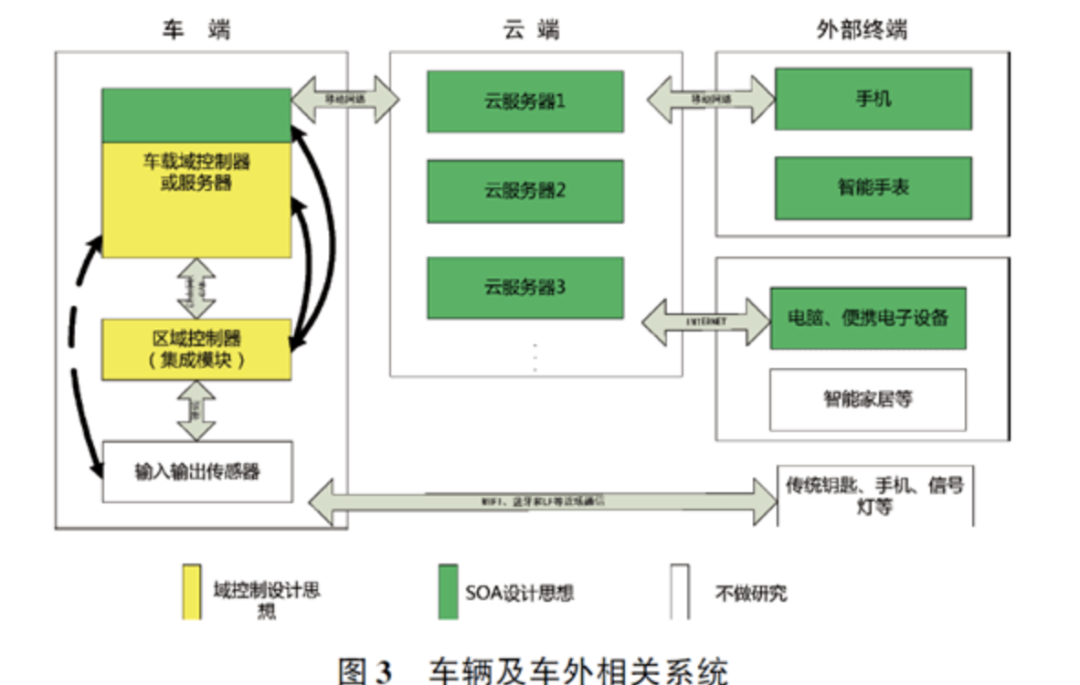
可以看出未來車載電控架構的主要ECU節點由域控制器?區域控制器和輸入傳感器?輸出執行器組成。相比于未來的最佳化模型, 基于當前零部件供應商發展現狀, 一些獨立的傳統ECU控制器(如電子車身穩定系統, Electronic Stability Program, ESP)還會存在。未來的架構之所以呈現出這種形態, 是因為我們按照域控制設計方法把整車的需求進行分解。由這三部分硬件組成的車載電控系統就可完成軟件功能的開發。
因此最終網絡拓撲就是由這三種模塊構成。下面我們對這三個模塊的特點進行詳細說明。
2.1車載域控制器或服務器的特點
由于當前的ECU模塊芯片的算力有限, 所以在某些任務(如自動駕駛和智能座艙等)執行時存在計算性能不佳的問題。當前流行分法為主域控制器(未來發展成車載服務器)?智駕域和信息娛樂域控制器, 它的關鍵性能指標如下:
①強大的計算能力, 用來完成純功能邏輯處理。
②強大的網絡連接和管理能力, 用來接收各種信息和發送控制指令的能力。
③滿足從汽車安全完整性等級(Automotive Safety Integ-rityLevel, ASIL)的A到D所有功能安全等級的要求。
④快速啟動和響應的能力。
⑤系統功耗與散熱的平衡性。
⑥系統硬件平臺方案的伸縮性, 如計算能力和芯片兼容性都有很大可選范圍。
⑦系統軟件平臺方案的移植能力。
⑧模塊外接電氣接口比較少, 主要是電源和網絡物理接口, 盡量提升模塊的通用率。
當前域控制器發展具體的特征如下:
①由于芯片計算能力不足, 當前發展主流是主域?信息娛樂域和智駕域控制器, 主域集成中央網關功能。
②車載以太網已經成為域控制器間通信必備, 且域間可變速率的控制器局域網絡(Controller Area Network with Flexible Data-Rate, CAN-FD)通信一定存在, 用于實時性和安全性的要求高于通信要求。
③域控制器支持多路以太網?CAN-FD和串行通信總線(Local Interconnect Network, LIN), 用來拓展連接能力, 一般不帶其他接口類型(如高低電平電氣接口)。
④域控制器硬件平臺當前是微控制單元(Micro con-troller Unit, MCU)+微處理器(Micro processor Unit, MPU), 未來芯片集成度會越高, 偏向盡量一顆芯片搞定一切, 例如集成直流變換器(Direct Current/Direct Current, DC/DC)?CAN和LIN收發器等。
⑤智駕域控制器由于傳感器的接口和協議沒有標準化, 所以智駕域最終的網絡形式還未確定。
⑥域控制器的軟硬件平臺目前已經統一, 通過同系列不同型號統一硬件平臺, 通過Hypervisor和Adapter Autosar等實現應用APP的平臺化。
2.2車載區域控制器特點
區域控制器能夠接收輸入傳感器的信息和來自域控制的指令, 并控制實際的輸出執行器, 以及把輸出執行器和輸入傳感器狀態發給域控制器?它的關鍵性能指標如下:
①處理純功能邏輯少, 以實時操作系統和微處理器為特點的平臺, 主要完成一些實時性高的功能。
②支持很多路CAN和LIN, 以及一或兩路以太網網絡連接能力。
③滿足ASIL從A到D所有等級功能安全的要求。
④啟動和響應的能力。
⑤不用考慮增加額外的散熱器件。
⑥系統硬件平臺方案的伸縮性, 如計算能力和芯片兼容性都有很大可選范圍。
⑦系統軟件平臺方案的移植能力。
⑧模塊外接電氣接口比較多, 但是后續都是通用的I/O接口。
當前區域控制器發展特征如下:
①功能執行要求實時性較強, 硬件一般以MCU(視頻需求除外)為主。
②區域控制器當前無引入以太網的需求, 隨著智駕方案確認才有可能引入以太網, 區域控制器主要以CAN?LIN和硬線等方式拓展功能靈活性。
③區域控制器的數量與整車的定位有關, 但是對于一款車型, 區域控制器的數量是固定的, 只有輸入輸出傳感器和執行器的數量是變化的。
④區域控制器軟硬件平臺可以統一, 對比之前設計復雜度會降低, 重點在于整車廠的系統設計能力。
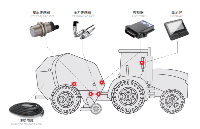
2.3輸入傳感器和輸出執行器特點
隨著智駕技術的發展, 各種各樣的傳感器和執行器被應用到車輛。目前有多家供應商提供相關產品, 每家的思路不盡相同, 導致同種類型的傳感器多種多樣。這就需要整車廠的系統設計和引導, 并在機械結構?分類方法?信號接口等幾個方面對傳感器進行標準化規范。
輸入傳感器的形狀?結構和接口在未來會進一步標準化, 便于零件的通用化, 特別是對于大的整車廠更需如此。
輸入傳感器分類標準化, 如開關?視頻?超聲波雷達和加速度傳感器等, 并且要對電氣接口或通信協議進行標準化設計。
輸入傳感器與上層區域控制器接口實現標準化。開關接口為高低電平?脈沖寬度調制(Pulse Width Modulation, PWM)和模數(Analogue/Digital, AD), 以及超聲波雷達和攝像頭等。
3、域控制設計方法實現過程
原來整車系統及架構都是功能需求分析后, 大多直接把功能塊分配給ECU, 再進行相關方案設計。而新一代的電子架構的系統更加復雜, 所以正向開發顯得尤為重要。下面簡要說明在原來開發過程需要增加的工作。
3.1功能需求分解
功能需求分解是把每個子功能塊涉及的硬件(輸入和輸出)與功能邏輯分離。也可以在原來的功能塊定義的基礎上進行分離, 并確定輸入傳感器和輸出執行器件種類和數量。
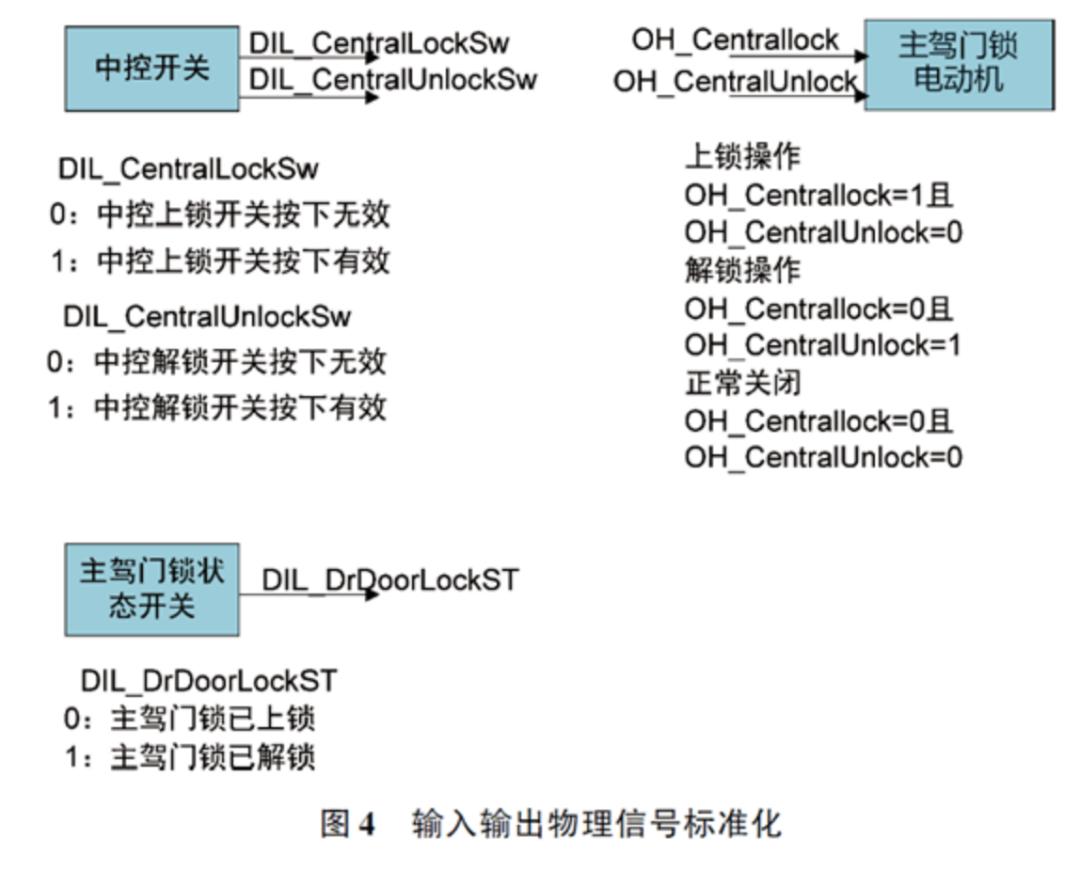
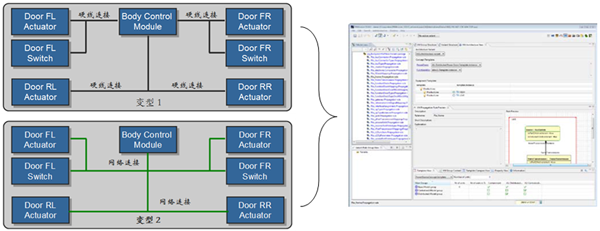
3.2標準化所有的輸入輸出物理信號
根據功能定義和輸入輸出設備特性, 定義和設計所有輸入輸出物理信號, 包括信號名稱和信號狀態定義等。如圖4所示, 以中控門鎖的模塊設計為例, 對輸入輸出信號標準化進行說明。
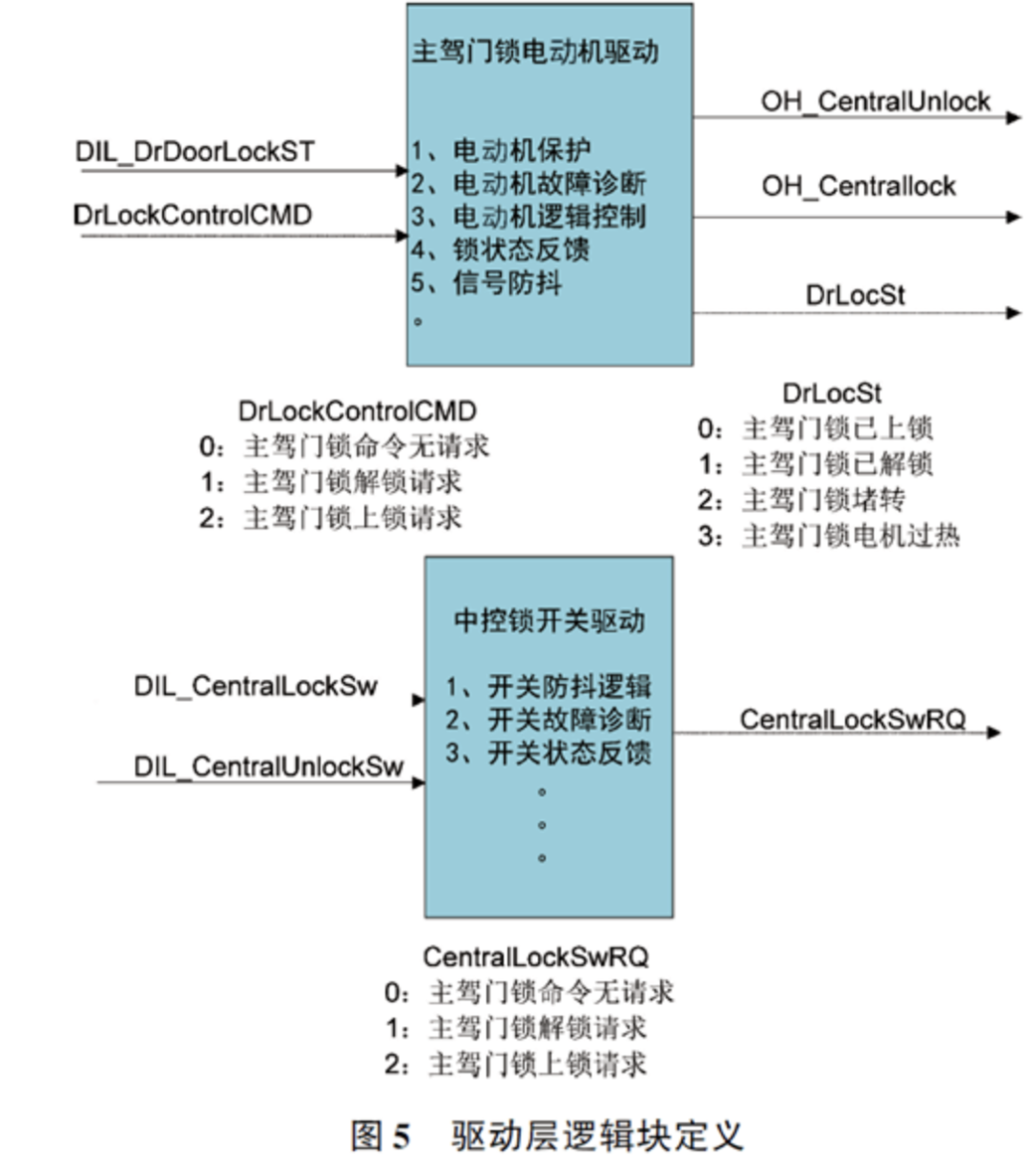
3.3驅動層邏輯塊定義
驅動層是直接接收和控制輸入輸出的物理信號的邏輯設計, 如圖5所示。
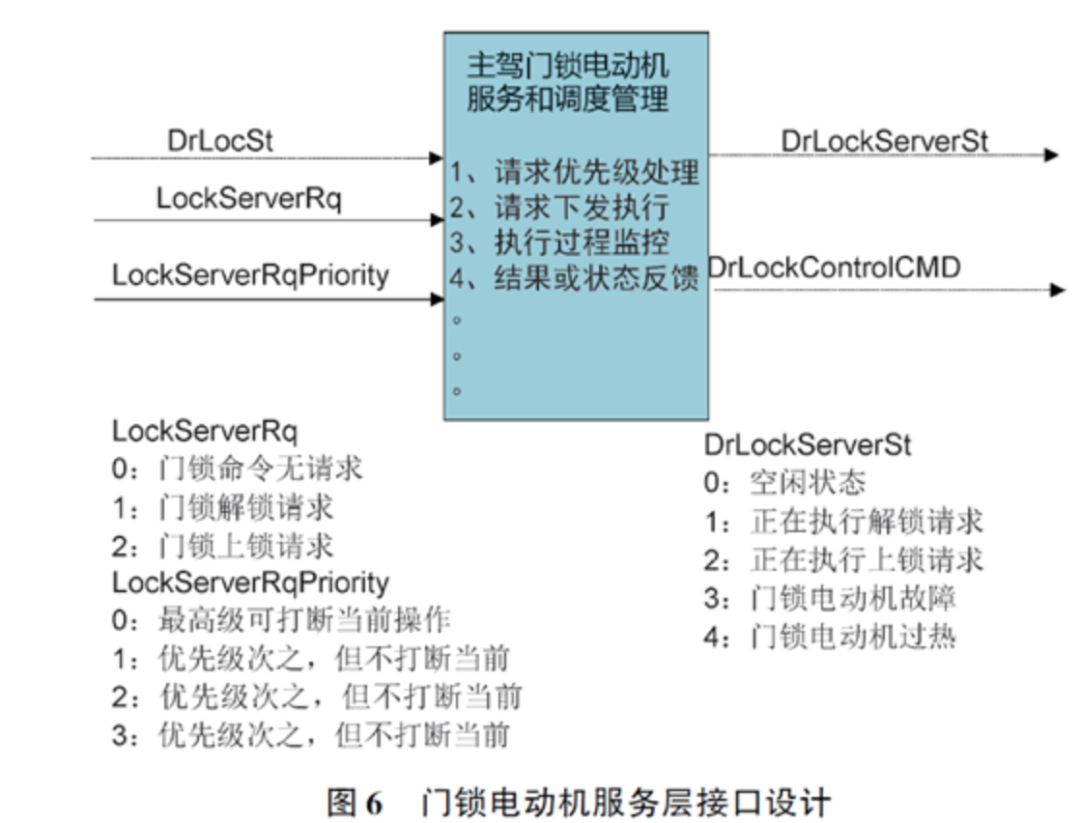
3.4純功能邏輯塊定義
首先純功能塊定義一定要增加一個類似設備服務層(圖6), 提供一個唯一可調用所有輸入輸出設備提供服務的接口, 用來調度設備服務和監控設備的運行狀態。
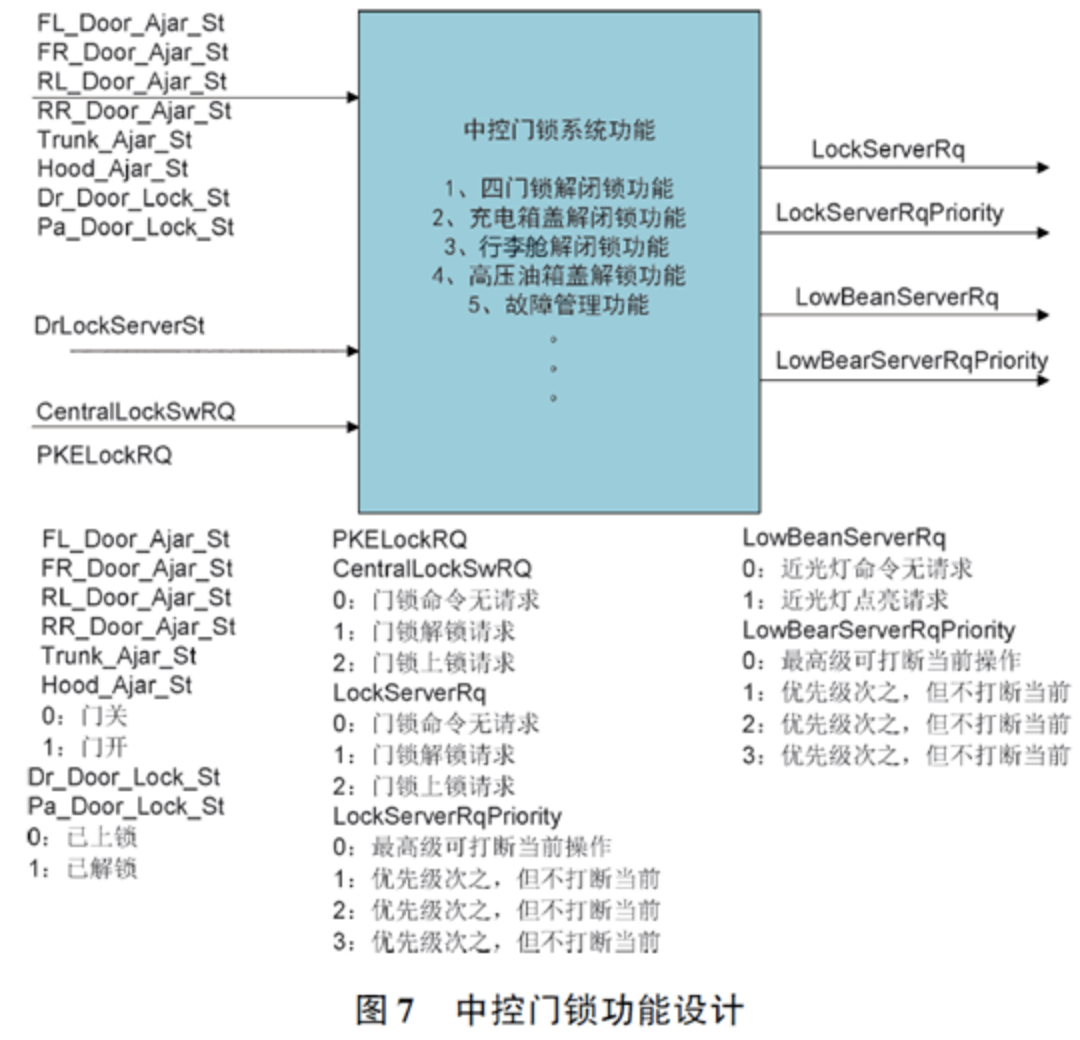
車輛通用功能塊不宜太小, 可以參考功能列表來定義一部分功能塊。以功能模塊獨立性高?與外部輸入輸出接口信號少為優, 目的是減少功能邏輯耦合性。圖7所示為中控門鎖功能設計。
3.5子系統(區域控制器)設計
根據車身結構?線束布局和裝配工藝等特點, 把車身分為幾大區域。根據所處位置將輸入輸出物理硬件歸入對應區域中, 計算出各區域輸入輸出物理硬件數量, 得出具體的接口需求。根據接口數量合理設計出子系統的數量, 接口需求少的可以進行區域集成, 兩個區域的信號合成一個子系統。每個子系統都有一個主控ECU模塊(區域控制器)。
相應的驅動層邏輯塊屬于區域控制器執行的內部, 再系統評估出MCU性能是否滿足所有功能實時性要求。同時ECU基于域控制設計思想, 對應的AUTOSAR軟件架構需要做出相應變更, 如圖8和圖9所示。
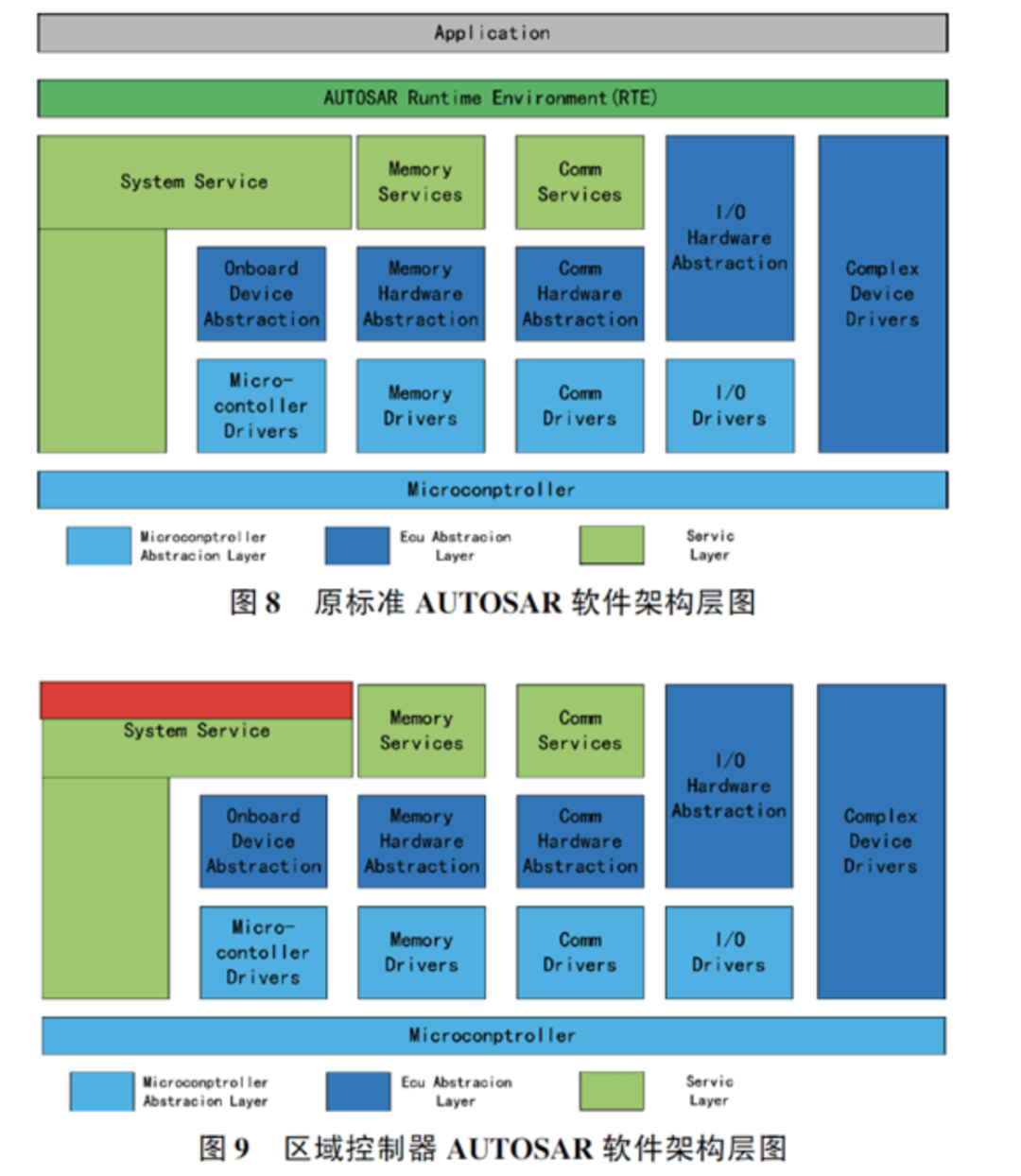
主要差異點如下:
①可以發現隨著應用功能的上移, 軟件架構的運行環境(Run–Time Environment, RTE)和APP層會最終消失。
②由于域控制診斷方法, 系統服務層需要進行設計變更。
③由于區域控制器的網絡連接和通信能力要求高, 并涉及相關的輸入輸出設備狀態和接收指令, 所以通信層需要做出設計變更。
從中可以發現區域控制器ECU軟件得到大大簡化, 再加上平臺化后, 軟件穩定性和效率大大提升。
3.6域控制器設計
純功能邏輯塊大多都歸入域控制器執行, 由于是不基于硬件, 域控制器處理性能有關。但是完整的功能實現, 與每個設備同步性和實時性相關, 而實時性主要由以下幾個參數決定:
①功能總的時間=信號采集時間+信號傳遞時間+邏輯處理時間+執行器硬件執行時間。
②信號采集時間和硬件執行時間:在器件選型后基本已經確定, 當然也可以改進。
③信號傳遞時間:通信方式和中轉過程等。
④邏輯處理時間:本身邏輯復雜度?操作系統(Oper-System, OS)性能和處理器性能等。
特別說明的是, 整車初次上電實時性高的功能時, 一定要考慮應用啟動時長, 不能存在功能失效的嚴重風險。
域控制器的軟件架構分為MPU和MCU兩部分, 這里主要說明MCU部分。當前整車的通用功能, 如燈光和刮水器功能等, 這些控制類?邏輯簡單?實時性高的功能都在MCU上實現, 具體的軟件架構如圖10所示。
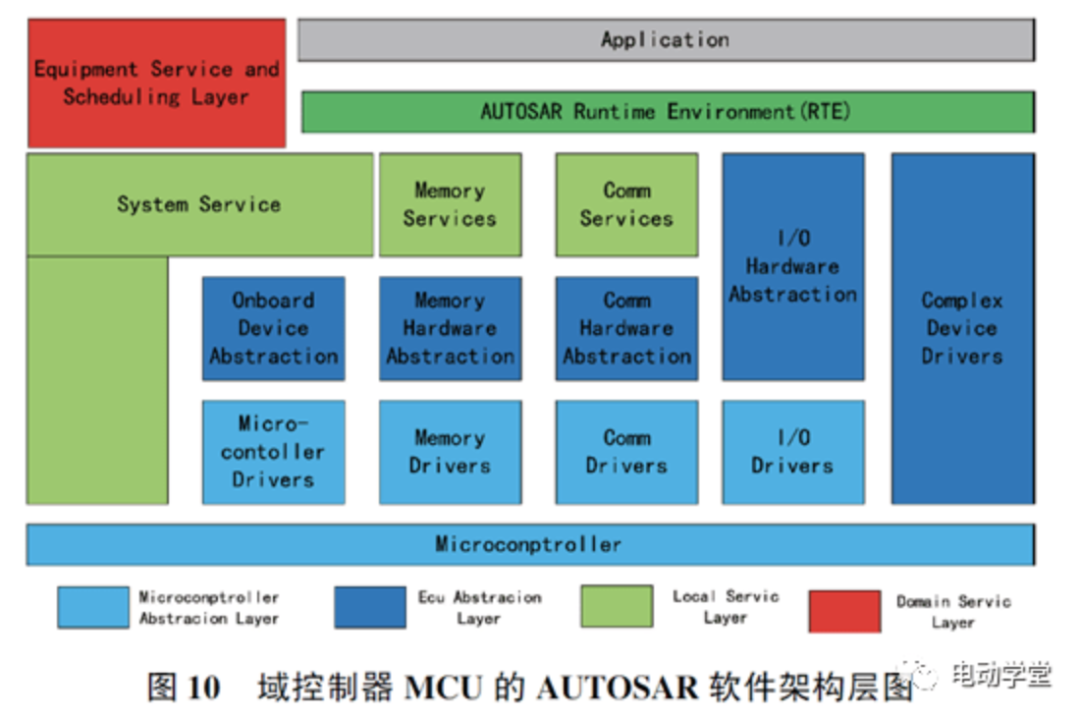
域控制器MCU主要差異點如下:
①除模塊本地系統服務外, 增加了域內設備服務和調度層, 為上層應用提供調用接口, 而不是通過RTE來實現, 包括接收MPU請求和反饋設備狀態等。
②系統服務層提供的診斷服務, 涉及整個域內設備, 并整合系統功能故障等。
③當前整車通用純邏輯功能絕大多數在MCU的APP層
MPU上實現一些計算能力要求高的功能, 如導航?音樂?視頻和智駕等, 通過MCU和MPU間通信實現系統功能, 但是目前軟件架構的標準化還處于初步階段, 需要一定周期。
4、域控制設計方法優點和風險
域控制設計方法讓車輛與外界實現很好的互聯?互通和應用的協同性, 真正打通了物聯網與車端的應用, 做到了完美連接, 同時帶來以下價值。
4.1域控制設計方法優點
4.1.1電控系統軟件和硬件平臺化
域控制設計方法最終實現整車所有域控制器和區域控制器模塊平臺化。多個硬件和軟件都集中在同一個平臺, 大大提升硬件和軟件的復用率, 后期效率呈倍數級提升。后續硬件可直接拔插升級, 軟件空中升級也相當方便。
4.1.2網絡拓撲的優化和負載率降低
網絡拓撲的優化和負載率降低, 域控制設計方法可以大大降低總線的信號數量, 以及更加清晰地設計網絡的拓撲結構。
4.1.3降本減重的需求
首先實現零部件的平臺化, 未來裝車量的增加, 零部件本身成本會有大幅下降? 其次, 由于設計方法中已經考慮了區域的問題, 所以線束長度和數量都會減少, 成本也將降低。
4.1.4軟件定義汽車最好平臺
軟件定義汽車實現離不開整車電子電器提供的服務, 而域控制設計方法實現軟硬件分離, 并充分挖掘出每個輸入輸出能提供的服務, 便于上層APP設計出更能給用戶帶來價值的功能。
4.2域控制設計方法風險
目前新架構還處于逐步成熟的過程中, 也有一些不確定因素, 主要風險如下:
①整車的系統設計能力不足, 需要一批對零部件設計比較熟悉的系統工程師, 從而決定域控制器和區域控制器模塊數量及接口標準化程度。
②由于零部件供應商對整車廠需求并不是很清楚, 只是推出相關硬件和軟件平臺, 對于實際應該具有的功能并不明確, 所以難以確定最終的成本和價值是否合適。
③域控制器和區域控制器模塊與主芯片緊密相關, NXP?英飛凌和瑞薩等廠商對于此設計處于剛剛定型狀態。
④域控制器的軟件成熟度和標準化都不完善。雖說有和ETAS等專業軟件設計供應商, 可是目前其產品也不夠成熟。
⑤傳感器和執行器模塊等也沒有標準化的管理, 不同的廠家接口千差萬別, 如CAN-FD?以太網和低壓差分信號接口(Low-Voltage Differential Signaling, LVDS)等。
⑥對于車載以太網的應用也正在研究, 在以太網診斷?安全和管理等方面并不是很成熟。盡管相關的協議大都從傳統互聯網而來, 但是具體到車載以太網的數據協議, 其實時性和安全性能否真正滿足車載的應用還在進一步研究。
⑦面臨信息安全問題, 方案成熟度有待驗證。
⑧目前真正成熟的能夠提供用戶價值的APP很少, 需求還在挖掘中, 造成具體收益未知。
5、結論
盡管目前有很多關于SOA的討論, 但服務需要有一個良好的平臺, 且SOME/IP (Scalableservice-Oriented Middle-war EoverIP)當前并不成熟, 本身車載以太網存在很多問題。我們研究域控制設計方法, 目的是打造全新的整車電控系統和架構, 并為域控制器上實現SOA設計思想提供一個開發性的軟硬件平臺。當然, 這也是技術發展和經濟效益結合的產物。
未來整車電控系統的發展方向會類似于通用功能的合并取消, 很多通用功能也會由于汽車智能化的發展而被取消, 但是更多人工智能的功能會被設計出來以提升用戶體驗, 從而提升整車價值。整車電控系統及架構則需要為實現這些功能提供完善的硬件和軟件平臺。
當前系統架構軟件和硬件標準平臺還不成熟, 對我國來說正好是個機會, 可以依托強大國內市場, 快速研究相關軟件和硬件技術, 并引入到國際標準內, 占領技術制高點。
審核編輯:劉清


















 工商網監
工商網監
評論