 電子發(fā)燒友App
電子發(fā)燒友App


智能駕駛需要很多不同專業(yè)的人協(xié)同工作,并不是所有人都是軟件或汽車軟件背景。為了能讓各種不同背景的人都能一定程度上理解文章內(nèi)容,本文盡量采用非常通俗的語言來描述,并配合各種圖來進行闡述。本文避免使用有歧義的術(shù)語,所有術(shù)語在第一次出現(xiàn)時都給出其在本文的準確定義。
智能駕駛軟件架構(gòu)的重要性
智能駕駛的簡化概念模型
智能駕駛的概念模型簡單來說就是解決三個核心問題: 1. 我在哪? 2. 我要去哪? 3. 我該如何去? 第一個問題“我在哪?”需要解決的是“環(huán)境感知”和“定位”問題,需要了解的是車自身的位置以及該位置周邊的靜態(tài)環(huán)境(道路,交通標識,信號燈等)和動態(tài)環(huán)境(車、人等)。
由此引發(fā)一系列的感知和定位的技術(shù)方案,包括各種傳感器以及算法體系。 第二個問題“我要去哪?”在自動駕駛領(lǐng)域就是“規(guī)劃決策”。由此延伸出一些術(shù)語“全局規(guī)劃””局部規(guī)劃"、“任務(wù)規(guī)劃”“路徑規(guī)劃”、"行為規(guī)劃”、“行為決策”“運動規(guī)劃”,等等,由于語言上的歧義,這些術(shù)語有的是同一個意思的不同說法,有的其含義在不同場合經(jīng)常相近但又有點差別。
拋開具體的術(shù)語,一般而言這“規(guī)劃決策”這個問題都會被分解為三部分:
1. 在一定范圍內(nèi)的全局意義上的規(guī)劃 (常用術(shù)語:全局規(guī)劃,路徑規(guī)劃,任務(wù)規(guī)劃)
2. 將第一步的結(jié)果做劃分出多個階段 (常用術(shù)語:行為規(guī)劃,行為決策)
3. 對每一個階段進行進一步的規(guī)劃 (常用術(shù)語:局部規(guī)劃,運動規(guī)劃)
對于這些各種各樣的規(guī)劃衍生出很多解決問題的算法體系。 第三個問題“我該如何去?”一般指的就是“控制執(zhí)行”,也就是對最小一個規(guī)劃的實際執(zhí)行實踐,達到規(guī)劃的目的。具體在車上,往往體現(xiàn)為各種控制算法,控制理論解決的就是這些問題。
因為這三個問題的解決歸根到底都是算法問題,所以某種意義上,說自動駕駛的核心就是算法。而軟件架構(gòu)從某種意義上說,就是要能承載這些算法。沒有很好的承載體系,再好的算法也無用武之地。
基礎(chǔ)概念模型的分形遞歸特性
為了方面我們把基礎(chǔ)概念模型的三個問題分別表示為 E , P, X,分別代表 環(huán)境(Environment)、計劃(Plan)、執(zhí)行(eXecute)。每一組 E-P-X 都有其描述問題空間。 比如說,我們定義問題空間 A 是“駕車從北京到廣州”,那么對于問題 E:其定位關(guān)注的可能就是當(dāng)前在北京那個區(qū),不必細化到街道。我們還需要關(guān)心天氣是否有雷暴雨,省道以上的道路結(jié)構(gòu)信息。
對于問題P:
P-1 : 第一步先設(shè)計出一個全局的路徑,走哪條高速、國道、省道
P-2 :根據(jù)全局路徑計劃出一系列行為組成,先到哪個高速路口,行駛多少公里,去服務(wù)區(qū)加油、更換到另一條道路等等
P-3:計劃出到每一段的具體道路路徑。比如到高速路口要走三環(huán)還是四環(huán),在換到哪條路上 X 要執(zhí)行 P 規(guī)劃出來的每一步。
如果我們定義問題空間 B 是“駕車安全通過一個路口”,那么對于E 問題,要關(guān)注的是當(dāng)前的道路信息、交通燈信息、道路上的車輛狀況、行人狀況等。
對于P 問題:
P-1 :第一步先規(guī)劃出通過路口的安全路徑,包括根據(jù)交通規(guī)則和道路信息計劃到達當(dāng)前路口的哪個車道,進入目標路口的哪個車道。
P-2 :第二步要第一步的根結(jié)果規(guī)劃出一系列動作序列,如先減速,切換目標車道,停車等紅燈,起步加速,通過路口。
P-3 :第三步對第二步的每一個動作要設(shè)計具體的一段軌跡,軌跡要能避開行人車輛等障礙物。
X 負責(zé)執(zhí)行執(zhí)行 P 問題的輸出結(jié)果。 這個問題空間 B 是最接近通常規(guī)劃算法要解決的問題。
其中 P-1 的第一步常稱為“全局規(guī)劃”或“任務(wù)規(guī)劃”,P-2 常被稱為“行為規(guī)劃”或 “行為決策”,P-3 被稱為“局部規(guī)劃”或“運動規(guī)劃(Motion Plan)”。如下圖所示,E-P-X 形成抽象的基礎(chǔ)概念模型,問題空間 A 和 B 都是其在某個范圍上的具體實現(xiàn)。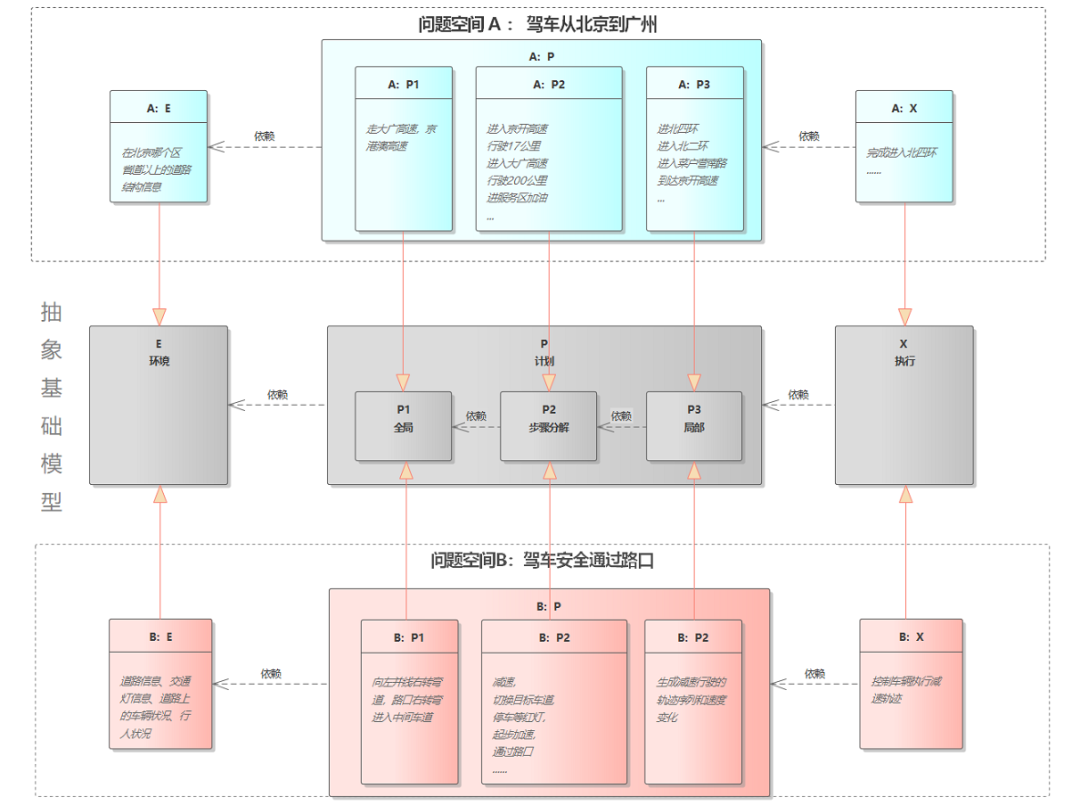
圖 1 兩個EPX的問題空間 A 和 B 兩個問題空間都有 相似的 E-P-X 結(jié)構(gòu),但是他們解決的問題在時間和空間上的跨度差別很大。
上圖中 A:X 需要執(zhí)行的任務(wù) “完成進入北四環(huán)”完全可以下一級的 EPX 循環(huán)去完成。所以實際上,如下圖所示 E-P-X 模型是一個分形遞歸的結(jié)構(gòu)。
圖2 ?EPX的分形遞歸結(jié)構(gòu) 上一級的 X 總能被下一級的再一次分解為更小粒度的 E-P-X 來執(zhí)行。 "分形" 又稱為“自相似分形”,其通俗理解是事物的局部與整體有相似的結(jié)構(gòu),是在不同尺度上的對稱,例如一顆樹的一支樹枝與整顆樹是相似的結(jié)構(gòu),再進一步,每片樹葉的莖脈也是相似的結(jié)構(gòu)。下圖列舉了一些典型的分形結(jié)構(gòu)。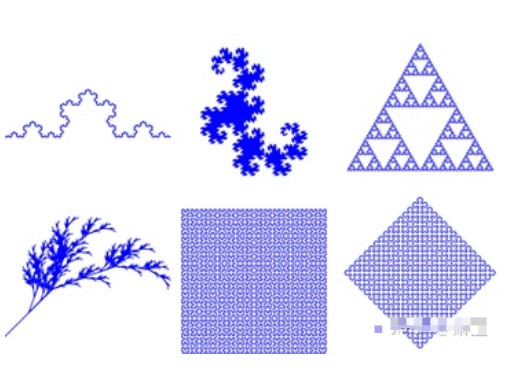
圖3 分形示例
這 6 個圖形都有一個特點,每個圖形的任何一個局部都與整個圖形的結(jié)構(gòu)是一樣的。局部進一步放大,會發(fā)現(xiàn)局部的局部也是同樣的結(jié)構(gòu)。因此當(dāng)我們有一套業(yè)務(wù)處理邏輯能夠適用于整體,也同樣可以適用于局部。就像有些樹的培育,可以取一根樹枝種下去,會長成一棵新樹。映射到軟件程序的表達,就是“遞歸”。這并不是說使用遞歸函數(shù)來處理,是指架構(gòu)層級的遞歸。
“分形”更學(xué)術(shù)化的表達是"用分數(shù)維度的視角和數(shù)學(xué)方法描述和研究客觀事物,跳出了一維的線、二維的面、三維的立體乃至四維時空的傳統(tǒng)藩籬,更加趨近復(fù)雜系統(tǒng)的真實屬性與狀態(tài)的描述,更加符合客觀事物的多樣性與復(fù)雜性“。當(dāng)我們?yōu)椤拔锢憩F(xiàn)實”找到合適的數(shù)學(xué)表述,再轉(zhuǎn)換為“程序現(xiàn)實”,就能找到更簡潔、清晰、準確的軟件架構(gòu)及實現(xiàn)方式。
軟件架構(gòu)解決“物理現(xiàn)實”到“程序現(xiàn)實”的映射
E-P-X 是根據(jù)“物理現(xiàn)實”抽象出來的結(jié)構(gòu)。而且其中絕大部分都是各種各樣的是算法的工作。單個算法本身的研究和開發(fā)可以根據(jù)預(yù)定義的輸入輸出條件獨立進行。但是算法怎么組合起來,在合適的時機被正確的觸發(fā),其結(jié)果被合理使用,才能最終形成有實際用途的功能。這個從“物理現(xiàn)實”到“程序現(xiàn)實”的橋梁核心就是軟件架構(gòu)。
自動駕駛系統(tǒng)從 Level 1 到 Level 5, 越往上,上述 E-P-X 模型的嵌套深度就越多。軟件架構(gòu)上的難度也就越大。大部分單一的 Level1 和 Level2 功能只需要一層 E-P-X 模型。以 AEB (自動緊急剎車)為例: E 部分(感知) :主要就是對前方目標(車,人)的靜態(tài)識別和分類、動態(tài)跟蹤,檢測距離和速度。
P 部分: 因為 AEB 只做縱向的控制,可以全部通過對速度的控制來實現(xiàn)。所以只需要做對一段時間內(nèi)的速度做出規(guī)劃。
X 部分:將速度規(guī)劃交由車輛控制單元執(zhí)行。 并不是說只有一層 EPX ,AEB功能就簡單。實際上 能夠量產(chǎn)的 AEB 功能實現(xiàn)難度一樣是非常大的。不過一層的 EPX , 就不需要基于場景進行調(diào)度,只需要關(guān)注與單一場景下 EPX 的實現(xiàn),其軟件架構(gòu)就相對簡單。第二章會介紹 L2 功能常見的軟件架構(gòu)。
什么叫基于場景的調(diào)度?
即便是在最小粒度層級的 EPX 循環(huán)中,也不是一個EXP的實現(xiàn)就能解決這一層級的所有問題。 比如:就一個簡單的直線行駛用例,我們可以將最末端 X 單元實現(xiàn)為一個車輛控制算法,這算法處理完所有的平道、上坡、下坡場景。也可以使用一個調(diào)度單元(S),根據(jù) E 單元的信息,將平道、上坡、下坡識別為不同的場景,切換不同的 下一級 EXP 循環(huán)。下一級的每個 EXP 循環(huán)實現(xiàn)單一的場景。實際上,即便使用一個 X 單元的控制算法解決所有平道、上坡、下坡場景,這個算法內(nèi)部也一樣會對這些場景進行區(qū)分,實際還是一個微小粒度的 EXP 循環(huán)。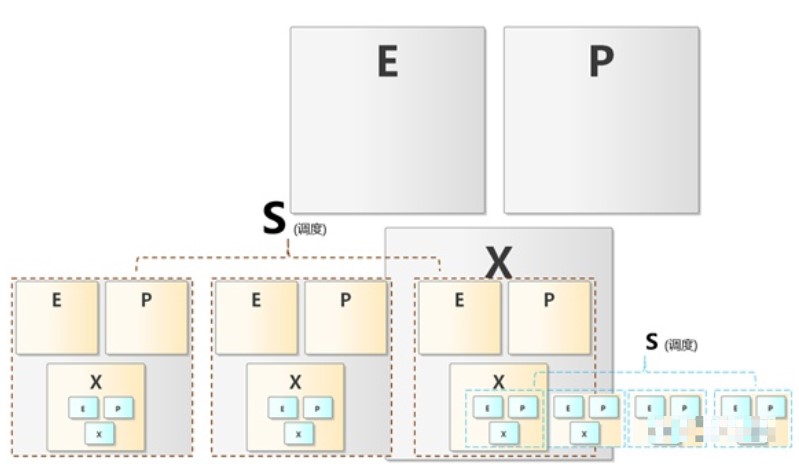
圖4 ?EPX的調(diào)度
如圖 4所示,場景的調(diào)度(S) 可以在每一個層級都有,也就是說對“場景”的定義也有粒度的劃分。所以 ,EPX模型應(yīng)該是 EPX-S 模型。只是在 L2 以下沒有明顯的 S 部分。
軟件架構(gòu)上如何兼容 L1 到 L3+
自動泊車輔助功能就開始有場景調(diào)度的需求,比如垂直泊車、垂直泊入、水平泊出、水平泊入、斜向泊入等等都是不同的場景,其 P 和 X 部分都需要分別實現(xiàn)。但是場景調(diào)度可以通過HMI界面由人工來選擇,是一個“人在回路中”的 S 單元。
Level 3 以上功能中,很長一段連續(xù)的駕駛過程都不需要人工干預(yù)。就必然涉及到多個不同的 EXP層級自動調(diào)度。這樣在軟件架構(gòu)上就跟L2以下功能有很大不同。這也是為什么很多公司把 L2 和 L3+分成兩個不同的團隊的原因之一。 實際上只要是有意識的基于多層級的 EXP-S 模型來設(shè)計軟件架構(gòu),每一個EXP-S單元都有其合適的體現(xiàn),實際上是可以實現(xiàn)一套軟件架構(gòu)支持從 L1到L3+以上的自動駕駛基本。
只是說 S 單元對 L2以下功能來說比較弱一些,但是其架構(gòu)地位仍然存在。
L2及以下單一功能控制器的軟件架構(gòu)
我們先來看一下L2 功能的常用軟件架構(gòu),我們對常用
使用Smart Sensor 的 AEB/ACC/LKA 解決方案
AEB/ACC/LKA 三個功能是 L2 最經(jīng)典的駕駛輔助功能,一般的系統(tǒng)方案的感知部分多采用前向的攝像頭輸出目標(車輛、行人)信息,并與前向毫米波雷達給出的目標數(shù)據(jù)做融合,得到更準確的速度和距離。視覺感知和雷達感知多采用Smart Sensor 方案,這樣 Tier 1 可以選用成熟的 Tier2 供應(yīng)商的產(chǎn)品。Tier 1 主要的開發(fā)工作在感知融合與功能狀態(tài)機的實現(xiàn)以及車輛控制算法。
常用的硬件架構(gòu)
方案一:視覺感知結(jié)果傳遞給雷達感知控制器,雷達感知控制器中完成感知融合和 L2功能狀態(tài)機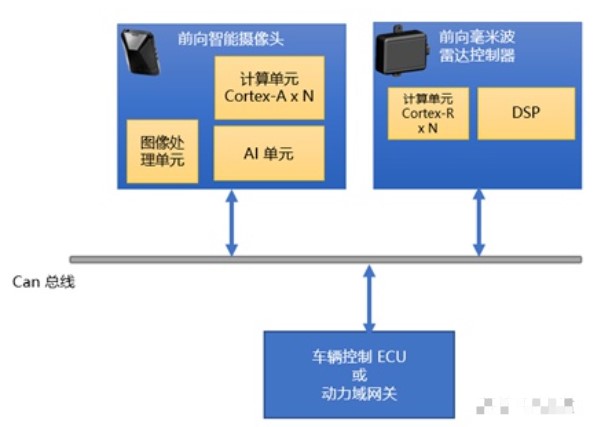
圖 5 方案一拓撲
方案二:獨立的L2 控制器連接 視覺和雷達的Smart Sensor,L2控制器完成感知融合和 L2 功能狀態(tài)機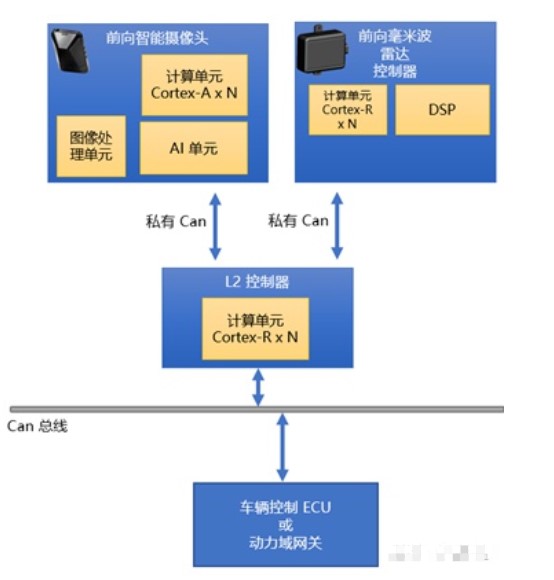
圖 6 方案二拓撲
兩個方案都是經(jīng)常被采用的。方案一采用較高性能的雷達控制器,分配部分計算單元用來實現(xiàn)融合算法和功能狀態(tài)機。很多芯片廠商做雷達處理芯片設(shè)計時就考慮到這部分算力預(yù)留。比如NXP 專為雷達ECU設(shè)計的 S32R 系列,其多核心足夠同時做雷達信號處理與 L2 的功能實現(xiàn)。畢竟最耗算力的視覺算法是在另外器件上完成的。
方案二單獨獨立出來 L2實現(xiàn) L2 功能的控制器, 通過私有Can 與兩個 Smart Sensor 通訊獲取感知數(shù)據(jù)。一般來說,這個方案可以考慮后續(xù)增加更多的 L2 功能,如果有需要,可以再接更多的 Smart Sensor。
典型的軟件架構(gòu)
對于采用 Smart Sensor 的系統(tǒng)架構(gòu)來說,前向智能攝像頭和前向毫米波雷達分別給出各自觀測到的環(huán)境中目標對象的語義。這兩部分數(shù)據(jù)直接通過 Can 總線或內(nèi)部的 IPC (計算機OS的進程間通訊)機制傳遞給負責(zé)感知融合和 L2 功能實現(xiàn)的模塊。
無論是硬件方案一還是方案二,業(yè)內(nèi)最常用的軟件架構(gòu)是基于 Classic AutoSar 來開發(fā)。Classic AutoSar 提供了車載ECU通用的功能并為引用軟件提供執(zhí)行環(huán)境和數(shù)據(jù)輸入輸出通道。感知融合模塊和其它 ACC/AEB/LKA 功能可以實現(xiàn)為一個或多個 AutoSar SWC(軟件組件)。具體這些 SWC 組件是否進行拆分,如何拆分,各家開發(fā)商有自己的合理邏輯。但基本架構(gòu)大同小異。
當(dāng)然也可以不采用 Classic AutoSar , 用其它合適的 RTOS 作為底層系統(tǒng),或許對于車載ECU需要通用功能開發(fā)和達到功能安全標準的難度會大一些,但在應(yīng)用功能開發(fā)的架構(gòu)體系上跟采用 Classic AutoSar 的方案沒有太大差別。 
圖7 ACC/AEB/LKA 的典型軟件架構(gòu) ?
MBD開發(fā)方式
業(yè)內(nèi)常用MBD(基于模型的開發(fā))方式來實現(xiàn)感知融合算法,規(guī)劃和控制執(zhí)行算法以及 ACC/AEB/LKA 功能狀態(tài)機。然后使用工具生成 C 代碼,再手動集成到目標平臺。MDB開發(fā)方式的一個便利之處在于可以先使用模型工具和 CanOE 之類的設(shè)備直接上車開發(fā)調(diào)試,或者與仿真平臺連接進行開發(fā)調(diào)試。這樣開發(fā)團隊可以分成兩部分,一部分人用模型工具開發(fā)應(yīng)用功能,一部分人開發(fā)所有車載ECU都需要的一系列繁瑣工作,然后再集成在一起。
集成度更高的產(chǎn)品解決方案
一般全自動泊車產(chǎn)品會采用集成度更高的方案,在一個 ECU 內(nèi)將視覺算法(靜態(tài)障礙物識別,動態(tài)障礙物識別,行人識別,車位線識別)超聲波雷達算法(距離檢測,障礙物檢測)泊車過程的軌跡規(guī)劃和控制執(zhí)行,都放在一個控制器內(nèi)完成。集成度更高的還會在自動泊車控制器中同時 支持360環(huán)視功能,這就還需要支持攝像頭環(huán)視圖像的校正和拼接2D/3D 的圖形渲染視頻輸出HMI 生成等功能。
?示意性的硬件拓撲如下。
硬件拓撲示意
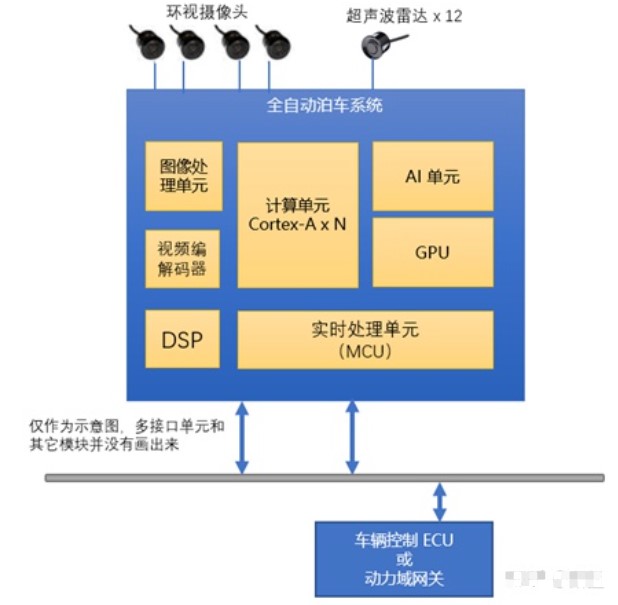
圖 8 ?泊車系統(tǒng)的硬件拓撲方案
圖中的各個模塊在不同的硬件選型方案中有不同的分布模式。一般情況下用于實時處理的 MCU 會單獨使用一顆芯片。不同的芯片廠家有各自的 AI 單元解決方案。有的用高性能的 DSP,有的專有的矩陣計算單元,有的用FPGA, 不一而足。
典型的軟件架構(gòu)
下圖是自動泊車系統(tǒng)一個典型的軟件架構(gòu)(只是簡化后的示意,實際量產(chǎn)系統(tǒng)會復(fù)雜更多): 與 2.1.1 相比,這里最顯著的改變就是區(qū)分了“實時域”和 “性能域”兩套系統(tǒng)。一般來說,我們把MCU或其它實時核心(Cortex-R,Cortex-M 或其它對等系列)上的軟硬件系統(tǒng)成為“實時域”。把 SOC 內(nèi)的大核心(Cortex-A或?qū)Φ认盗校┮约斑\行在其上的 Linux/QNX 統(tǒng)稱為性能域,這里面一般還包含了支持視覺算法加速的軟硬件體系。 雖然從量產(chǎn)的工程化難度上,全自動泊車系統(tǒng)比 ACC/AEB/LKA 等 Level2 主動安全功能要小很多。但是在軟件架構(gòu)上,泊車系統(tǒng)卻復(fù)雜很多。主要體現(xiàn)在以下方面: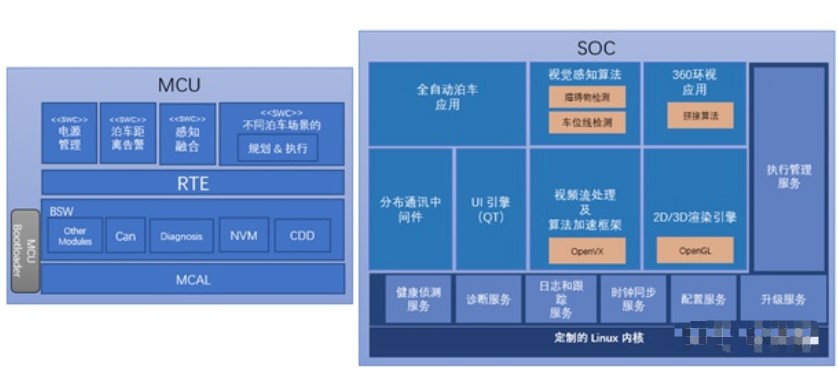
圖 9 ?泊車系統(tǒng)的軟件架構(gòu)
實時域和性能域的劃分帶來系統(tǒng)性的復(fù)雜度,需要根據(jù)實時性要求和計算資源的要求,為不同的計算選擇不同的硬件平臺
性能域的 OS 采用 Linux 后 ,OS 級別的執(zhí)行環(huán)境比RTOS復(fù)雜很多
需要一系列的框架或中間件來支持應(yīng)用的開發(fā)
數(shù)據(jù)通路復(fù)雜性
增加了視頻流的處理通路
增加了實時域和性能域之間的數(shù)據(jù)通路需求
性能域各個軟件模塊之間有數(shù)據(jù)通訊要求
落實到具體的芯片平臺解決方案后,架構(gòu)設(shè)計需要跟芯片的各種 SDK 進行整合和統(tǒng)籌設(shè)計
另外,通過這個軟件架構(gòu)可以看到,引入Linux (或QNX/vxworks)后帶來的一些問題。這些系統(tǒng)本身是與特定行業(yè)無關(guān)的計算機操作系統(tǒng),當(dāng)被用于汽車電子控制器的時候,會有一系列與特定產(chǎn)品功能無關(guān),但是作為汽車 ECU 需要具備的通用功能需要實現(xiàn)。比如診斷、時鐘同步、升級等等。這部分在整體的控制器開發(fā)中占了非常大的工作量,很多情況下會超過40%,而且跟控制器的可靠性非常相關(guān)。
在網(wǎng)絡(luò)通訊設(shè)備領(lǐng)域,這些往往被稱為管理平面。很多也是 AutoSar AP 提供的基礎(chǔ)能力。實際上無論是 CP AutoSar 還是 AP AutoSar ,除了負責(zé)通訊的模塊,其他大部分都是管理平面的能力。
多個單一功能的 ECU 的協(xié)同
如果一輛車上有多種 L2 功能該如何協(xié)同工作。下圖是一個簡化的多控制器拓撲示例。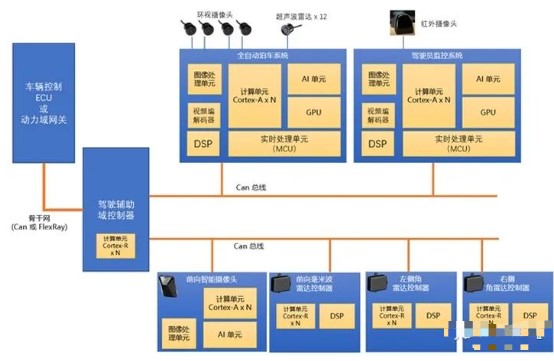
圖10 多個L2 功能控制器加域控制器的拓撲方案
這個拓撲中集成了6個控制器,“全自動泊車系統(tǒng)”“前向智能攝像頭”和“前向毫米波雷達”提供的功能如前面所述。左右角雷達是兩個鏡像的設(shè)備,各自獨立運行可以實現(xiàn)“后車逼近告警”,“開門告警”等功能。“駕駛員監(jiān)控系統(tǒng)”檢測駕駛員的狀態(tài),發(fā)現(xiàn)駕駛員疲勞駕駛時可以給出告警,如果駕駛員完全失去行動能力,就通知其它系統(tǒng)嘗試減速靠邊停車。
這個拓撲中有如下要點:引入域控制器連接多個獨立的駕駛輔助功能控制器,域控制器與骨干網(wǎng)連接;駕駛輔助域內(nèi)多條 Can 總線,避免總線帶寬不夠。
從軟件架構(gòu)上講,各駕駛輔助控制器獨立運行,自主決定自己的功能開啟和停止。相關(guān)控制信號發(fā)送給域控制器,由域控制器轉(zhuǎn)發(fā)到動力域。駕駛輔助域控制器要負責(zé)對各獨立控制器的控制輸出做出裁決。從域控制器在這里可以起的作用看,由輕到重有各種可能的設(shè)計。
輕量化的域控制器設(shè)計中,域控制器只做簡單的數(shù)據(jù)轉(zhuǎn)發(fā),將骨干網(wǎng)上的數(shù)據(jù)篩選后發(fā)送到域內(nèi)的控制器。將域內(nèi)控制器的控制信號發(fā)送到骨干網(wǎng)。這種方式對域控制器的算力要求不高。
域控制器再多承擔(dān)一些工作就可以把其它控制器的實時域部分的計算工作接管過去。比如ACC/AEB/LKA 的規(guī)劃控制計算都放在域控制器中進行。這就要求其他控制器把感知數(shù)據(jù)發(fā)送給域控制器,由域控制器統(tǒng)一處理。這對算力要求就更高了一些。同時對域內(nèi)網(wǎng)絡(luò)的帶寬要求也提高了。
更進一步,因為能拿到所有的感知數(shù)據(jù),域控制器還可以開發(fā)出一些增加的功能,比如依靠圖中的傳感器,有可能在域控制器中實現(xiàn)變道輔助或緊急避障的功能。 在功能逐步往域控制器集中的過程中,承擔(dān)了感知部分的其它控制器的非感知部分就被逐步弱化。
EPX-SA 概念模型
仲裁機制
前面說到,ACC/AEB/LKA 功能實現(xiàn),全自動泊車的實現(xiàn),以及其他的單一 L2 以下功能,都可以理解為一層或兩層分形遞歸的 EPX-S 模型。
其實 ACC/AEB/LKA 這三個功能,在實際量產(chǎn)產(chǎn)品中就是可以同時開啟的,每個都是一個單獨的 EPX-S 循環(huán)。也就是說多個 EPX-S 循環(huán)是可以同時并行運行的。如果同時產(chǎn)生的 X 輸出,需要由一個仲裁機制進行裁決(Arbitration)。
當(dāng)有多個控制器同時運行的時候由域控制器在更高層級上進行仲裁。 所以 EPX-S 模型應(yīng)該被擴展為 EPX-SA 模型。如下圖所示,場景1和場景2是兩個并行運行的 EPX-S 循環(huán),它們產(chǎn)生的 X 被經(jīng)過仲裁后輸出。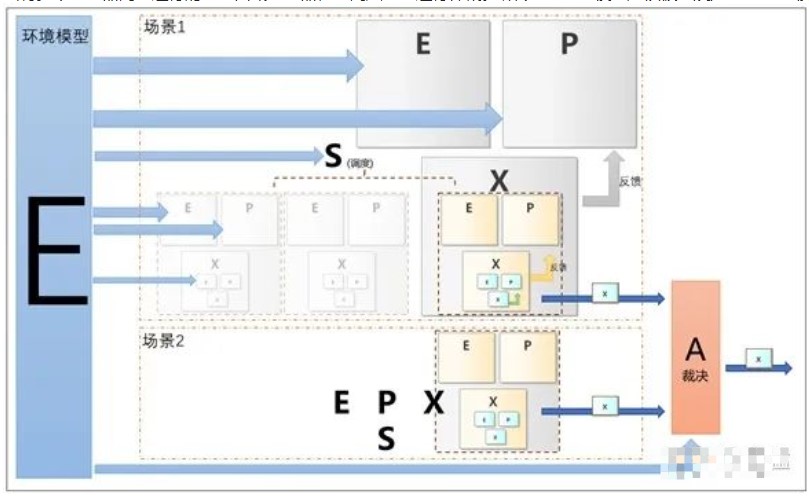
圖 11 ?EPX-SA 概念模型 ?
環(huán)境模型概念的提出
每個實現(xiàn)單一 L2 功能的控制器都有某一方面的感知能力。都描述了車輛內(nèi)外環(huán)境中某一個方面的屬性,可以從空間上的角度、距離進行劃分,也可以從物理屬性進行劃分,如可見光,超聲波,毫米波,激光。如果對整個環(huán)境建立一個理想的完全準確的3D模型系統(tǒng),每一個傳感器就相當(dāng)于這個模型的一個過濾器,像“盲人摸象”一樣,各自表達了理想模型某一方面的屬性。
智能駕駛的感知部分,實際上就是用盡可能多的傳感器加上算法來達到對理想模型的逼近。可用的傳感器越多,算法越準確,與理想模型的偏差就越少。
L2的域控制器中,如果需要,可以取到所有下級控制器的感知數(shù)據(jù),那么在這一級,就可以基于所有的感知結(jié)果拼出一個理想環(huán)境模型的現(xiàn)實模型,雖然與理想模型還有很大差距,但是已經(jīng)是一個整體意義上的環(huán)境模型。 環(huán)境模型提供的信息,不僅僅用在各級的規(guī)劃模塊(P),在調(diào)度(S) 和仲裁(A)階段一樣會被用到。 ? ? ??
審核編輯:劉清









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論