 電子發(fā)燒友App
電子發(fā)燒友App


目前全球范圍內乘用車最主流的混動系統(tǒng)主要有:單電機并聯、雙電機串并聯(混聯)、以及動力分流三種混動結構。本文從豐田THS 1/2代和通用Voltech2代的結構入手,分析了這兩套系統(tǒng)各自行駛模式下的動力流。
歐洲廠商相對更傾向使用單電機并聯的混動結構。按照電機在整個傳動系中不同的布置位置,又可以分為P0,P1,P2,P3,P4等結構(見圖1)。例如德國大眾Glof GTE(DQ400E)將電機和電機離合器布置于發(fā)動機與變速器之間,為P2的結構;國內市場熱銷的比亞迪秦將電機布置在差速器前,為P3結構;比亞迪唐在秦的基礎上,在后橋上又增加了一個電機,形成了P3+P4的雙電機并聯結構,同時實現了電四驅;此外,目前熱門的48V弱混系統(tǒng)大都是將單電機布置在原來發(fā)電機的位置,即為P0結構。
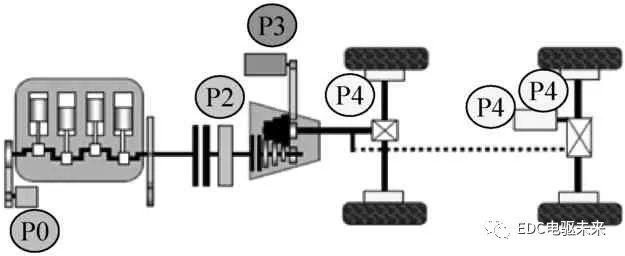
圖1 單電機并聯結構
Fig.1 Single-EM Parallel Structure
上海汽車的榮威E550(圖2),三菱歐藍德PHEV以及本田的i-MMD混動系統(tǒng)采用的都是雙電機混聯結構,可以實現串聯、并聯、發(fā)動機直驅等混動模式,本文不作過多的介紹。
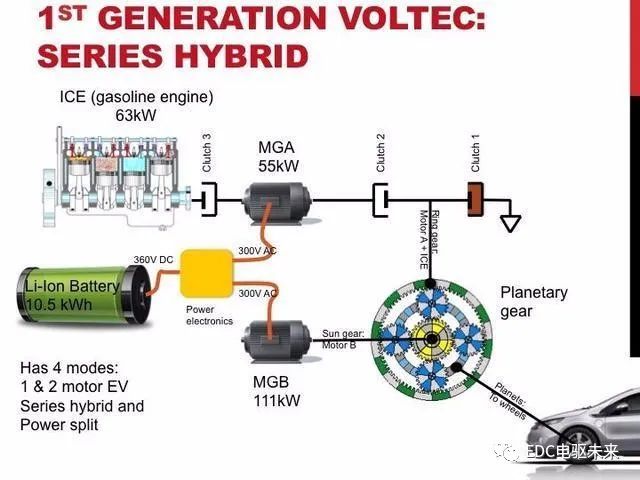
在美日混動乘用車市場占據絕對主力的混動結構則是以豐田THS (TOYOTA Hybrid System)以及通用Voltech為代表的E-CVT動力分流(Power-Split)混動系統(tǒng)。下面將對這兩種系統(tǒng)做詳細深入的介紹和分析。
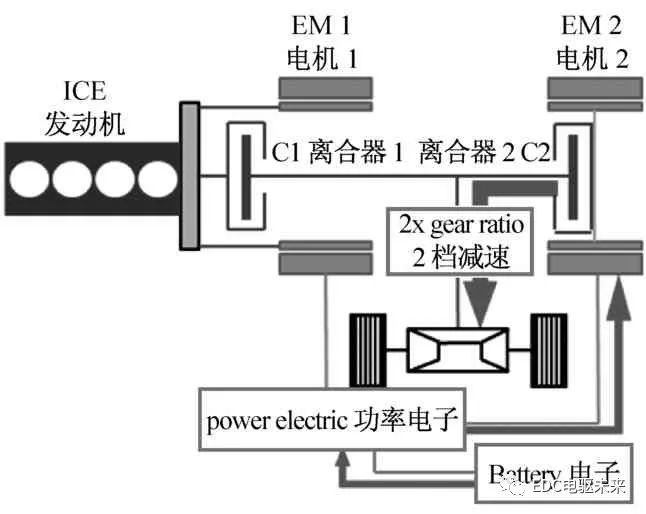
圖2 上海汽車榮威e550 EDU結構圖
Fig.2 SAIC Rowea E550 Twin-EM Series/Parallel Structure
1 豐田THS 1/2代系統(tǒng)
豐田普銳斯、卡羅拉雙擎、雷凌雙擎,雷克薩斯CT200h等混動車型使用的均為THS(TOYOTA Hybrid System)混動系統(tǒng)[4-6]。
1.1 結構原理
THS 1/2代混動系統(tǒng)的結構組成如圖3所示,由一臺阿特金森發(fā)動機(ICE),兩個電機(EM1,EM2)以及一個簡單行星輪組成。
ICE與行星架(C)連接, EM1與太陽輪(S)連接, EM2與齒圈(R)連接并與差速器連接以輸出動力。該系統(tǒng)可以實現 純電(EV Mode) 及 動力分流(Power-Split Mode) 兩種行駛模式。
為了便于后面計算分析,這里定義簡單行星輪的齒圈齒數Zr與太陽輪齒數Zs比∝為:
(1)
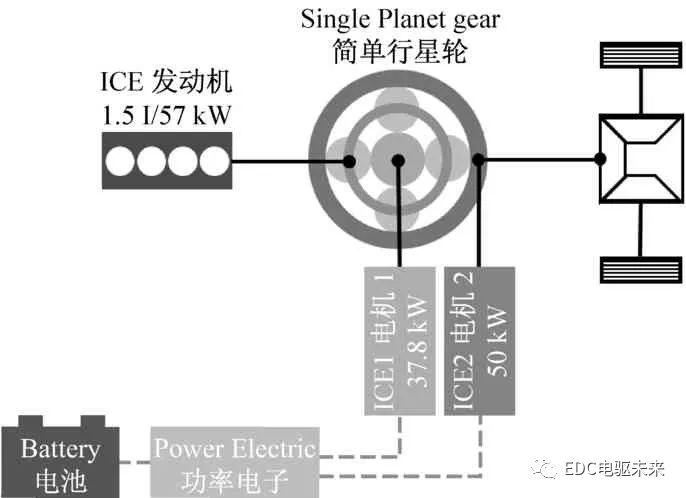
圖3 TOYOTA THS Gen1/2結構原理
Fig.3 Structure of THS Gen1/2
1.2 不同駕駛模式的動力流分析
1) 純電模式(EV Mode):
純電模式下,如圖4所示, ICE處于停機狀態(tài)(鎖止),EM2通過齒圈直接驅動車輛行駛,此時EM1由于簡單行星輪的運動關系處于反向空轉的狀態(tài)。假設車輛前進時齒圈順時針旋轉(下同),則EM1和EM2運動關系如圖5所示。
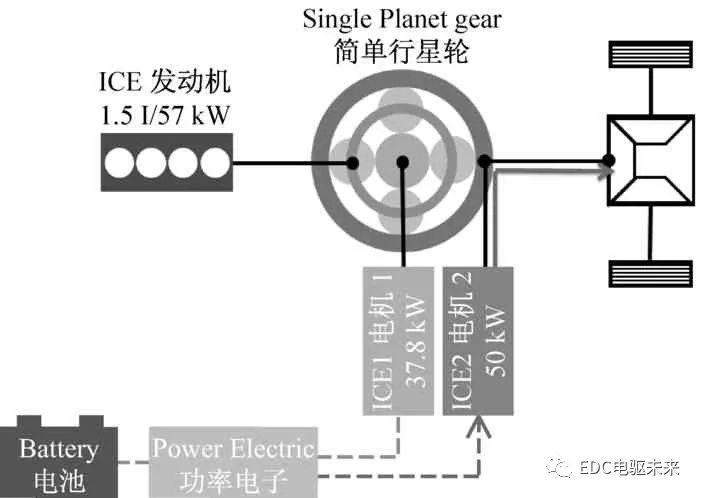
圖4 純電模式動力流
Fig.4 EV Mode Power Flow
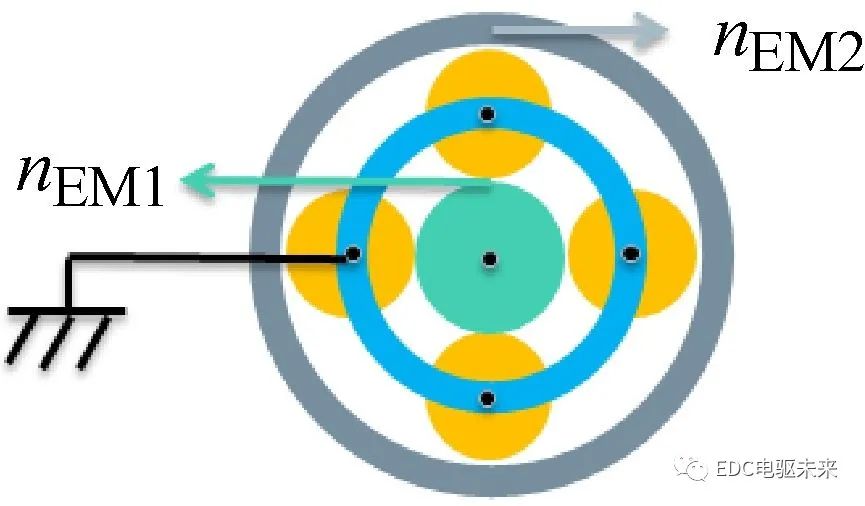
圖5 EV Mode行星齒輪各元件運動關系
Fig.5 EV Mode kinematic relation
通過杠桿法(The Level Analogy[7])我們可以對該運行模式下的行星輪各運動元件進行轉速及扭矩的分析,如圖6所示。
此時EM2正轉輸出功率,EM1反向空轉,且轉速為EM2的α倍(式2),整個系統(tǒng)的輸出扭矩Tsum即為TEM2(式3):

(2)
(3)
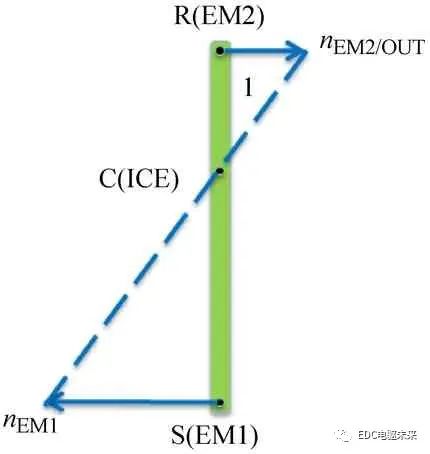
圖6 EV Mode杠桿法轉速分析
Fig.6 EV Mode Level Analogy Analysis
由于EM1轉速為EM2的α倍,受限于EM1的最高轉速,純電模式下車速最高只能達到40MPH(約64KPH,基于普銳斯α=2.6得出),之后發(fā)動機必須啟動,以降低EM1的轉速。
2) 動力分流模式(Power-Split Mode):
動力分流模式下,如圖7所示, ICE處于運行狀態(tài)將功率通過行星架輸入到行星輪系中,EM1處于負功率的發(fā)電狀態(tài),EM2處于輸出功率的狀態(tài)。行星輪系各元件運動關系如圖8所示。
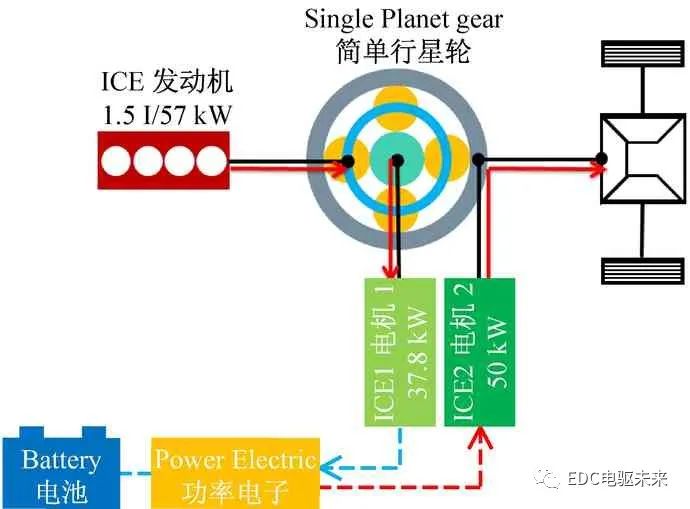
圖7 動力分流模式
Fig.7 Power-Split Mode Power Flow
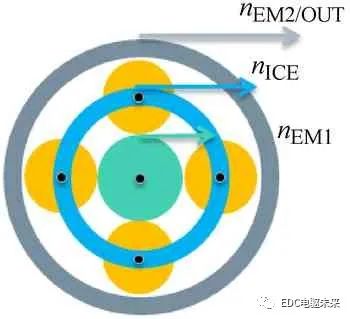
圖8 Power-Split Mode行星齒輪各元件運動關系
Fig.8 Power-Split Mode kinematic relation
同樣通過杠桿法對該運行模式下的行星輪各運動元件進行轉速及扭矩的分析(見圖9)。
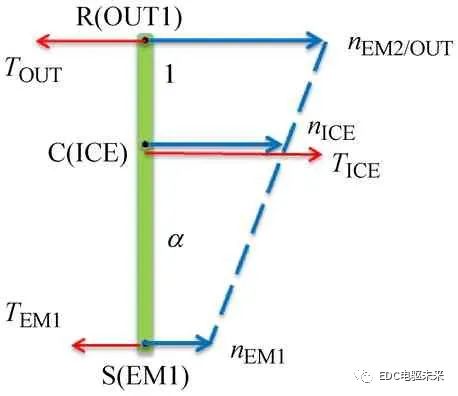
圖9 Power-Split Mode杠桿法轉速扭矩分析
Fig.9 Power-Split Mode Level Analogy Analysis
從圖9我們可以得出發(fā)動機(ICE)、EM1、EM2的轉速關系滿足式4:

(4)
ICE,EM1和輸出到差速器的扭矩相互平衡,滿足式5:

(5)
由α=2.6,帶入式4和式5后可得式6式7,即發(fā)動機輸入到行星輪系中的扭矩的72%輸出到差速器驅動車輛,28%通過EM1進行發(fā)電。

(6)
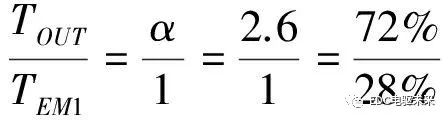
(7)
整個系統(tǒng)輸出到差速器用于驅動車輛的總扭矩如下式所示:

(8)
綜上,當車輛瞬時的行駛狀態(tài)一定時(即輸出轉速nEM2/OUT及行駛阻力扭矩TOUT確定):
● 由式6可知,通過控制EM1的轉速,可以調整發(fā)動機的轉速;
● 由式8可知,通過控制EM2的扭矩,可以調整發(fā)動機的輸出扭矩。
圖10展示了某傳統(tǒng)汽油發(fā)動機的油耗特性曲線,對于這臺發(fā)動機而言,當轉速在2600轉,扭矩在130Nm左右時發(fā)動機的瞬時油耗最低(淺綠色區(qū)域)。所以對于雙電機動力分流的混動系統(tǒng)來說,在動力分流行駛模式下,發(fā)動機的扭矩與轉速可以解耦地進行調整,這樣發(fā)動機可以盡可能地工作在最佳油耗區(qū)域。這一結論同樣適用與之后將介紹的通用Voltech 2代混動系統(tǒng)。[8-9]
1.3 動力分流混動效率分析
為了考量動力分流模式下的混動效率,我們提出下面兩個假設前提:
1) 整車為HEV,即非插電式混動;
2) 不考慮電池SOC,即發(fā)電電機的發(fā)電功率完全供給驅動電機用于驅動車輛,即PEM1=-PEM2。
在以上兩個假設條件下,混動模式中發(fā)動機輸出的功率越多地參與驅動車輛,越少地用于發(fā)電后再通過另一電機驅動車輛(多次能量轉換),能量轉換的損失就越小,即可以理解為理論上的混動效率越高。
通過上一節(jié)中的杠桿法所作的分析,我們可以求得兩個電機功率PEM與發(fā)動機功率PICE關系式9:
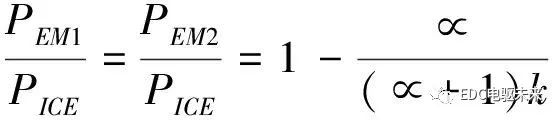
(9)
兩個電機轉速nEM與發(fā)動機轉速nICE比的關系式10,式11:
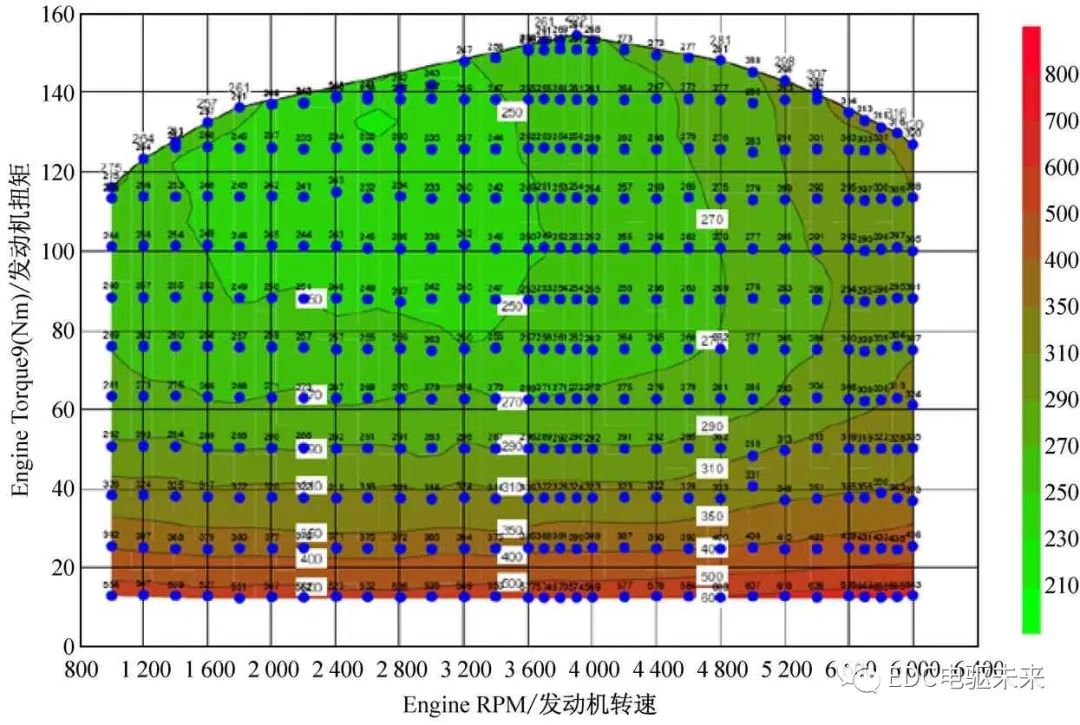
圖10 某傳統(tǒng)汽油發(fā)動機油耗特性曲線
Fig.10 Gasoline Engine Fuel Consumption Diagram (Example)
(10)
(11)
兩個電機扭矩TEM與發(fā)動機扭矩TICE比的關系滿足式12,式13:
(12)
(13)
根據式9-13分別作出功率比、扭矩比、轉速比的曲線,如圖11所示:
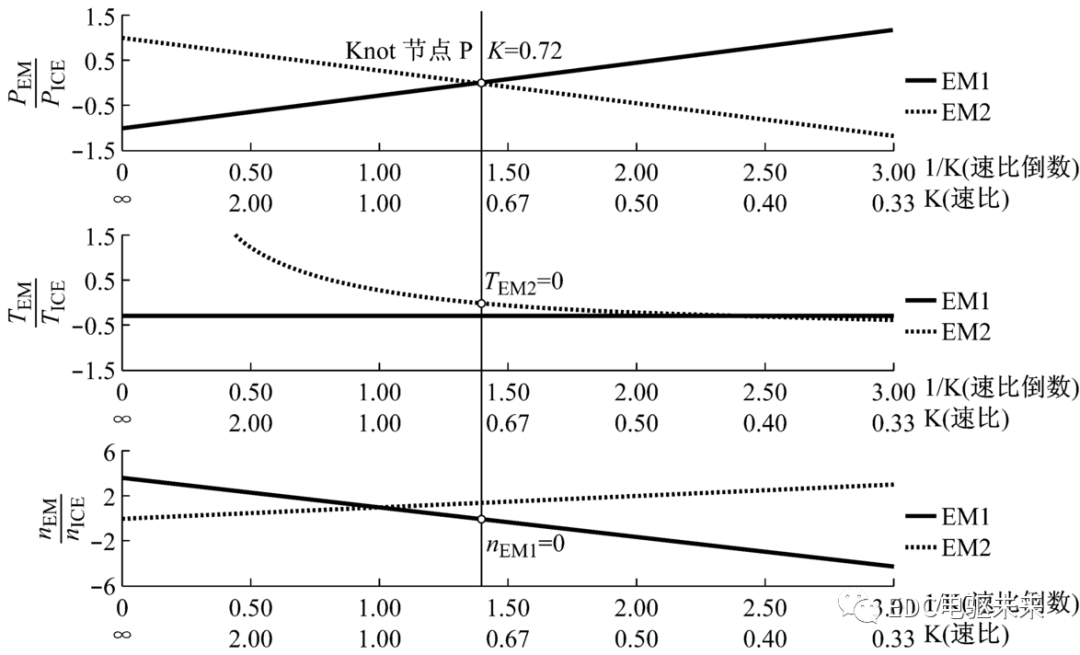
圖11 電機、發(fā)動機功率比、扭矩比、轉速比曲線
Fig.11 EM,ICE Power Ratio, Torque Ratio, Rotation speed Ratio
從圖上可見,該系統(tǒng)中有一個節(jié)點P(Knot),其對應的速比K為0.72(如上節(jié)所述,設α=2.6),在這個節(jié)點上EM1和EM2的功率都為零,其中EM2的扭矩TEM2=0,EM1的轉速nEM1=0,此時發(fā)動機輸出的所有功率均用于驅動車輛。
當速比大于節(jié)點K=0.72時(0.72左側),EM1發(fā)電(負功率),且發(fā)電所得所有功率都用于EM2輸出功率驅動車輛,當速比為∞時,兩個電機與發(fā)動機功率比為±1,即發(fā)動機功率全部用于EM2發(fā)電后供給EM1驅動車輛。
當速比小于節(jié)點K=0.72時(0.72右側),EM2開始發(fā)電(負功率),EM1開始輸出正功率,此時發(fā)動機的功率在系統(tǒng)輸出端(齒圈)進行分流,一部分用于驅動車輛,一部分由EM2發(fā)電后再將功率提供給EM1驅動太陽輪,這樣就形成了動力回流(Power Circulation),效率相對較低。
因此,在實際運行時,速比K一般會控制在節(jié)點0.72以上(圖中0.72左側)。
為了彌補純電模式下的最高車速較低這一系統(tǒng)限值,豐田在新一代的THS系統(tǒng)中增加了一組簡單行星輪作為減速機構,如圖12所示。第2組簡單行星輪的加入一方面可以解決EM1在純電模式下空轉轉速高的問題,對于PHEV的意義更大,另一方面可以降低系統(tǒng)對于EM2的功率扭矩要求。
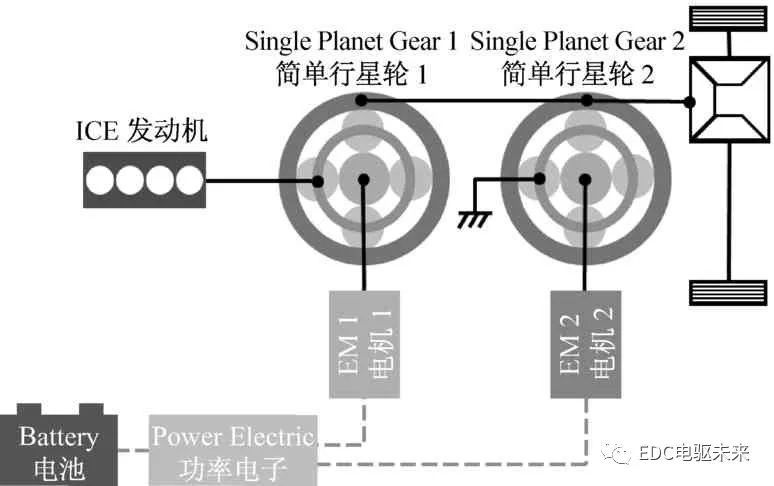
圖12 TOYOTA THS Gen3結構原理圖
Fig.12 Structure THS Gen3
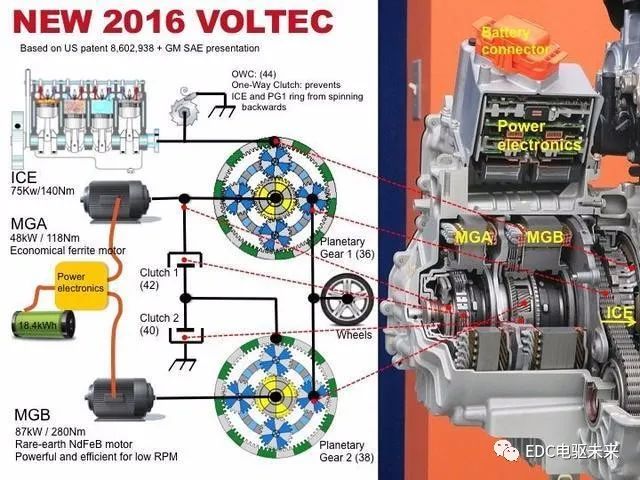
2 通用沃蘭達 Voltech 2代混動系統(tǒng)
2.1 結構原理
通用汽車在全新一代沃蘭達Volt上使用了Voltech 2代混動變速器。其結構如圖13所示,由一臺75kW發(fā)動機,兩個電機(EM1,EM2),一個單向離合器,兩組多片式離合器組成。可以實現以下5種行駛模式,其中模式3為單分流模式,模式5為復合分流模式:
1) 單電機純電模式(Single-EM EV Mode);
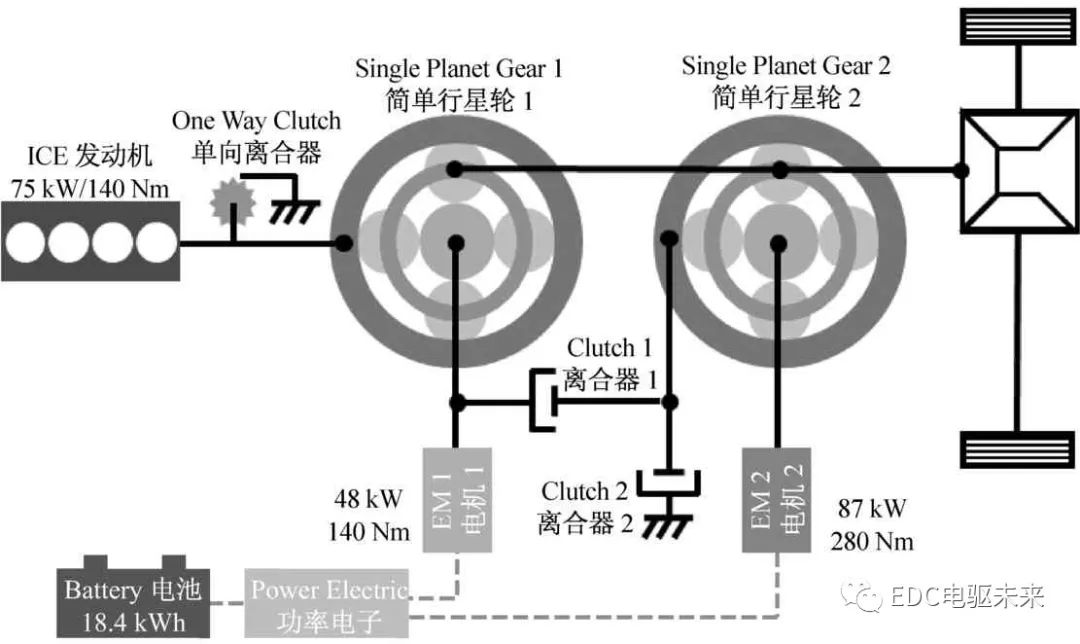
圖13 GM Voltech 2代結構原理圖
Fig.13 Structure GM Voltech2
2) 雙電機純電模式(Twin-EM EV Mode);
3) 低增程模式(Low Extended Range Mode);
4) 定速比增程模式(Fixed Ratio Extended Mode);
5) 高增程模式(High Extended Range Mode)。
2.2 不同行駛模式的動力流分析
由于本文主要討論和研究混動效率,因此這里僅對模式3“低增程模式“ 和模式5“高增程模式”運用杠桿法進行分析。其他的運行模式僅作簡要的動力流介紹。
1) 單電機純電模式(Single-EM EV Mode):
如圖14所示,單電機純電模式下,ICE處于熄火狀態(tài),離合器2接合使得簡單行星輪2的齒圈固定,EM2輸出動力到行星輪2的太陽輪,最終由行星輪2的行星架將動力輸出至差速器驅動車輛。
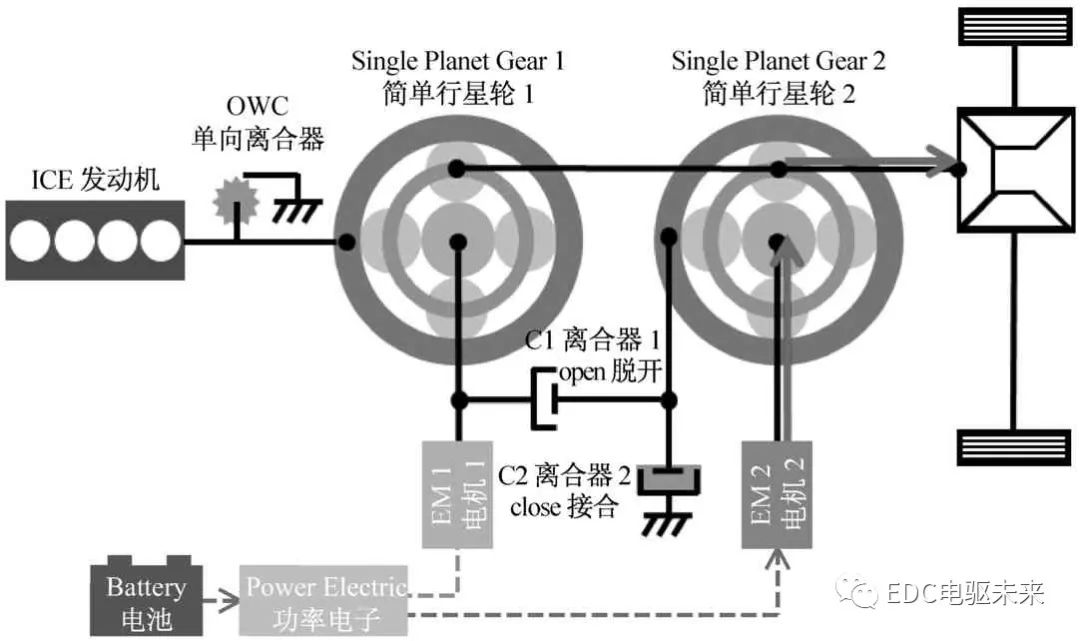
圖14 單電機純電模式動力流
Fig.14 Single-EM EV Mode Power Flow
2) 雙電機純電模式(Twin-EM EV Mode):
如圖15所示,在單電機純電模式的基礎上,雙電機模式下EM1也同時參與驅動,其與行星輪1的太陽輪連接,行星輪1的齒圈由于單向離合器的作用而被固定,EM1的動力由行星輪1的行星架輸出到差速器共同參與驅動車輛。
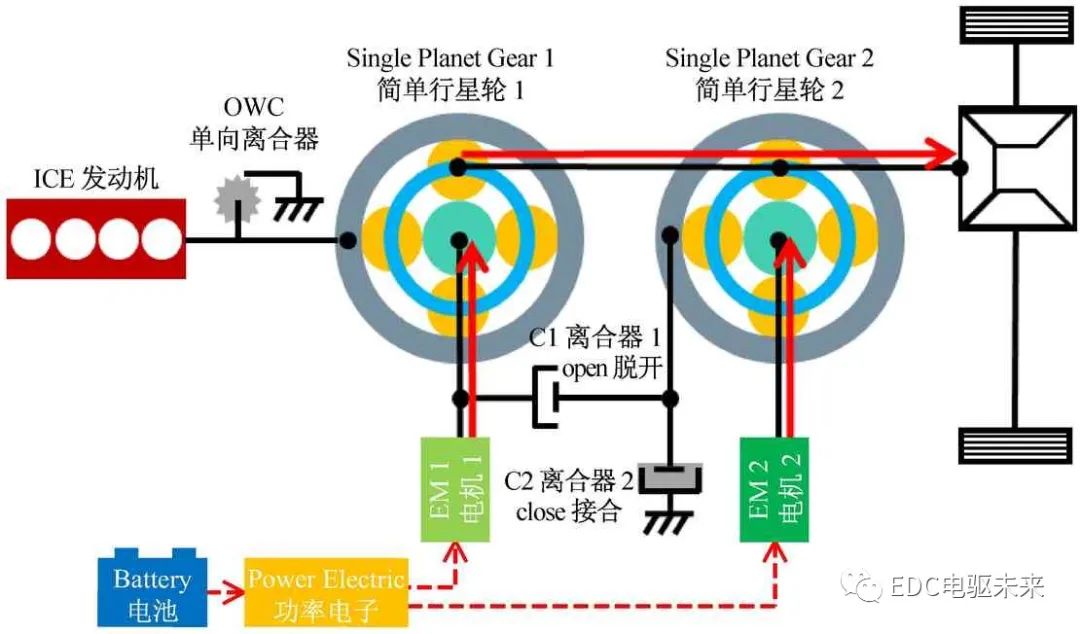
圖15 雙電機純電模式動力流
Fig.15 Twin-EM EV Mode Power Flow
3) 低增程模式(Low Extended Range Mode):
如圖16所示,低增程模式與豐田THS的動力分流模式類似,為一種單分流模式。此時ICE運行輸出功率到簡單行星輪1的齒圈,一部分功率驅動EM1進行發(fā)電,其余功率通過行星輪1的行星架輸出到差速器參與驅動車輛;EM2輸出正功率,通過行星輪2的行星架輸出共同驅動車輛。
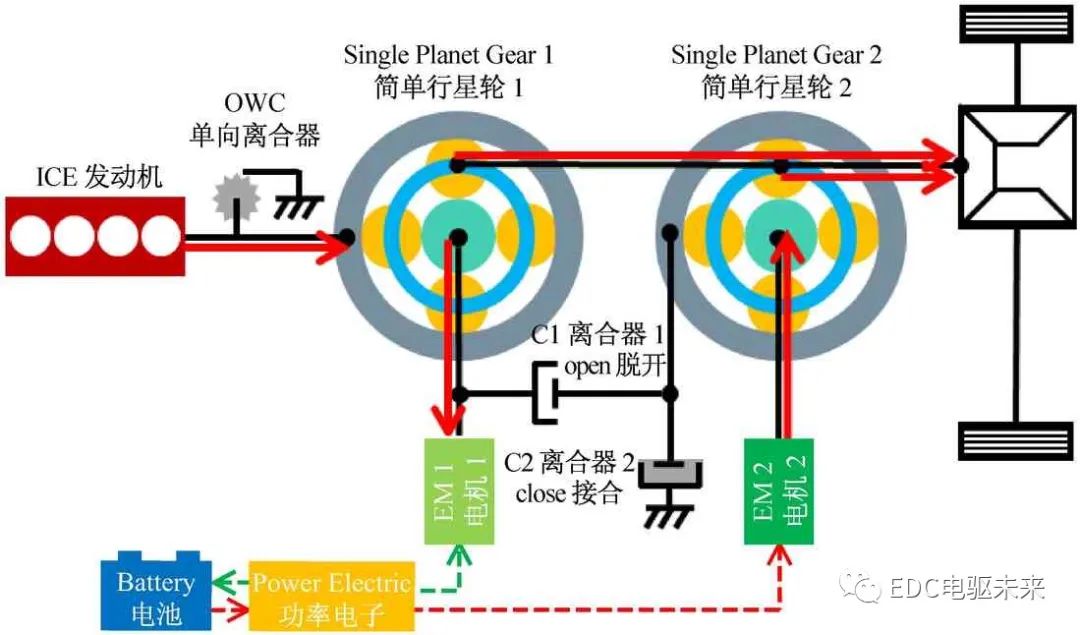
圖16 低增程模式動力流
Fig.16 Low Extended Range Mode Power Flow
首先運用杠桿法對低增程模式中的簡單行星輪1進行運動和扭矩分析,各元件的轉速和扭矩關系如圖17所示:
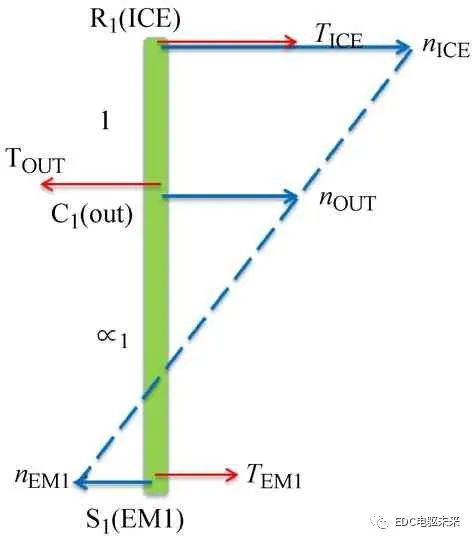
圖17 低增程模式杠桿法分析_簡單行星輪1
Fig.17 Low Extended Range Mode Level Analogy Analysis:
Single Planet Gear 1
從圖17可以得出ICE、EM1以及輸出端行星架C1的轉速關系滿足式14,輸出端扭矩TOUT與EM1的扭矩TEM1滿足式15:

(14)

(15)
如圖18再對簡單行星輪2進行運動分析,可得式16:

(16)
合并式9與式10,可得ICE、EM1、EM2的轉速關系式17:

(17)
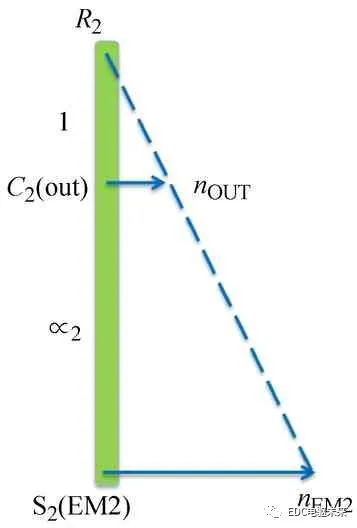
圖18 低增程模式杠桿法分析_簡單行星輪2
Fig.18 Low Extended Range Mode Level Analogy Analysis:
Single Planet Gear 2
最終可以得到EM與ICE的功率比關系式:
(18)
EM與ICE的轉速比關系式:
(19)
(20)
EM與ICE的扭矩比關系式:
(21)
(22)
4) 定速比增程模式(Fixed Ratio Extended Mode):
如圖19所示,此模式下兩個離合器都接合,電機1、行星輪1的太陽輪、行星輪2的齒圈都被固定,ICE動力輸入到行星輪1的齒圈,通過行星架2輸出動力到車輪,此時EM2可以輸出功率,也可以發(fā)電。但是從發(fā)動機到車輪的速比是固定不變的。
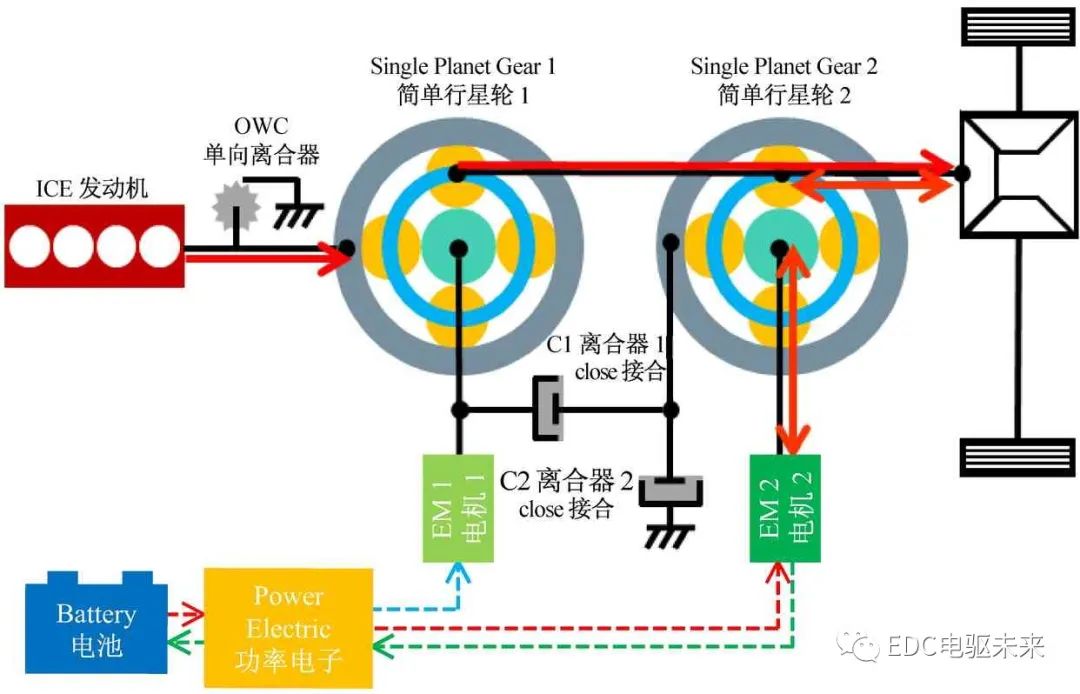
圖19 定速比增程模式動力流
Fig.19 Fixed Ratio Extended Mode Power Flow
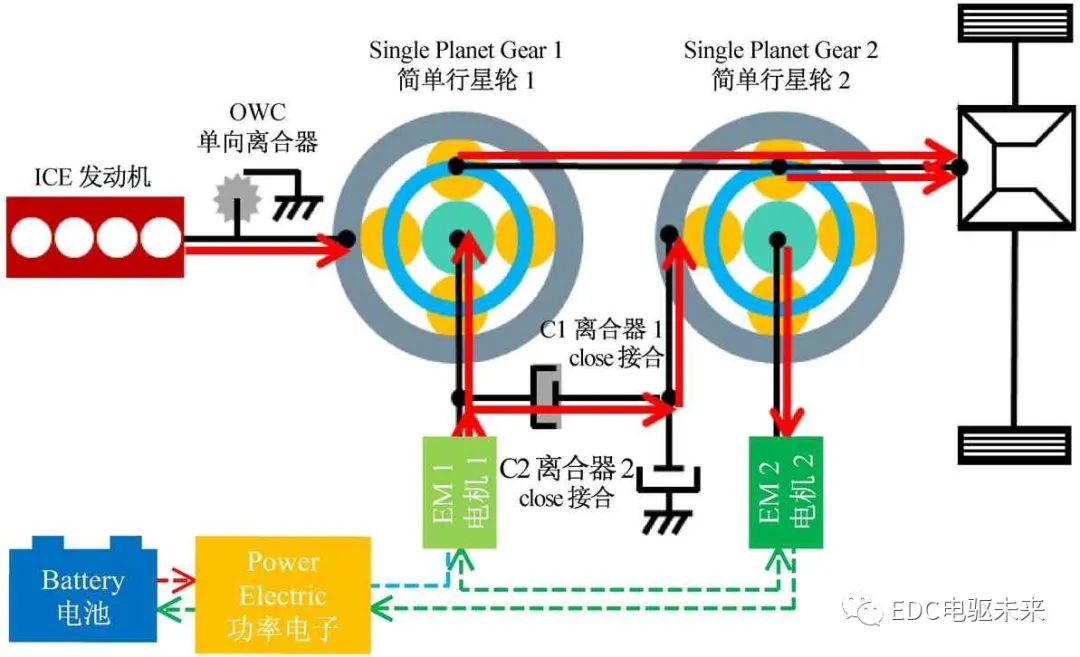
圖20 高增程模式動力流
Fig.20 High Extended Range Mode Power Flow
5) 高增程模式(High Extended Range Mode):
此為第二種動力分流模式,是一種復合分流模式。此時離合器1接合,離合器2脫開,ICE輸出的功率一部分輸出到車輪,一部分可以通過EM2發(fā)電,同時EM1輸出正功率參與驅動。
再次運用杠桿法進行運動和扭矩分析,將兩個行星輪進行合成后,各元件的轉速和扭矩關系如圖21所示,為了簡化計算,取a=∝1,b=∝1∝2-1:
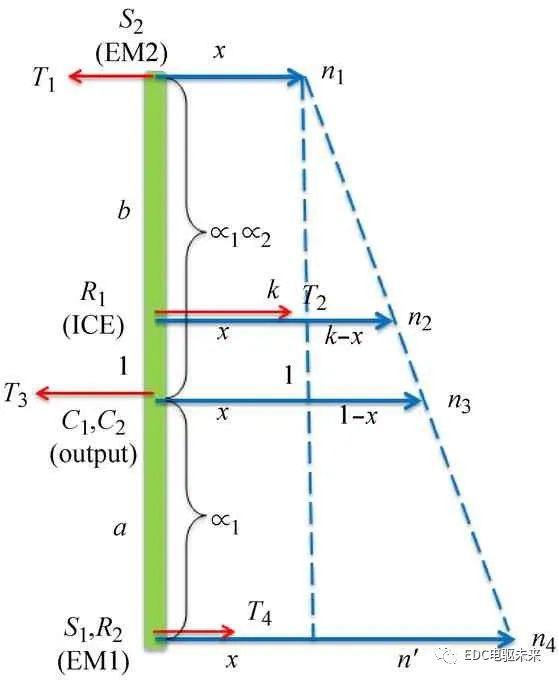
圖21 高增程模式杠桿法分析
Fig.21 High Extended Range Mode Level Analogy Analysis
最終可以得到EM與ICE的功率比關系式:

(23)
EM與ICE的轉速比關系式:

(24)
(25)
EM與ICE的扭矩比關系式:

(26)
(27)
2.3 動力分流混動效率分析
從相關資料中查得Voltech2代兩個行星輪實際的參數∝1=∝2=2.4(即a=∝1=2.4,b=∝1∝2-1=4.76),根據得出的關系式(單分流見式18-22,復合分流見式23-27),可以分別作出兩種模式的電機/發(fā)動機功率比、扭矩比、轉速比對應速比K及速比倒數(1/K)的曲線,如圖22所示。圖中直線表示單分流模式,曲線表示復合分流模式。
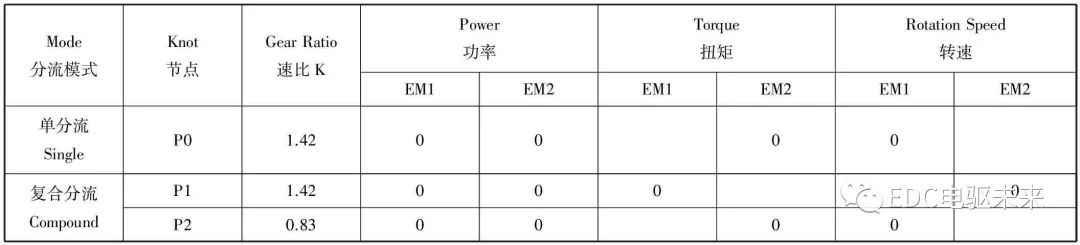
由下圖可見,這套動力分流系統(tǒng)有三個節(jié)點P0,P1和P2。單分流模式對應的節(jié)點為P0,復合分流模式對應的節(jié)點為P1和P2。實際求得單分流的節(jié)點P0和復合分流的節(jié)點P1重合,對應速比K=1.42,P2對應的速比K=0.83。在這兩個節(jié)點上兩個電機的功率均等于0,兩個電機的扭矩和轉速滿足表1的關系,而模式4定速比模式(Fixed Ratio Extended Mode)恰恰對應的是P1節(jié)點。
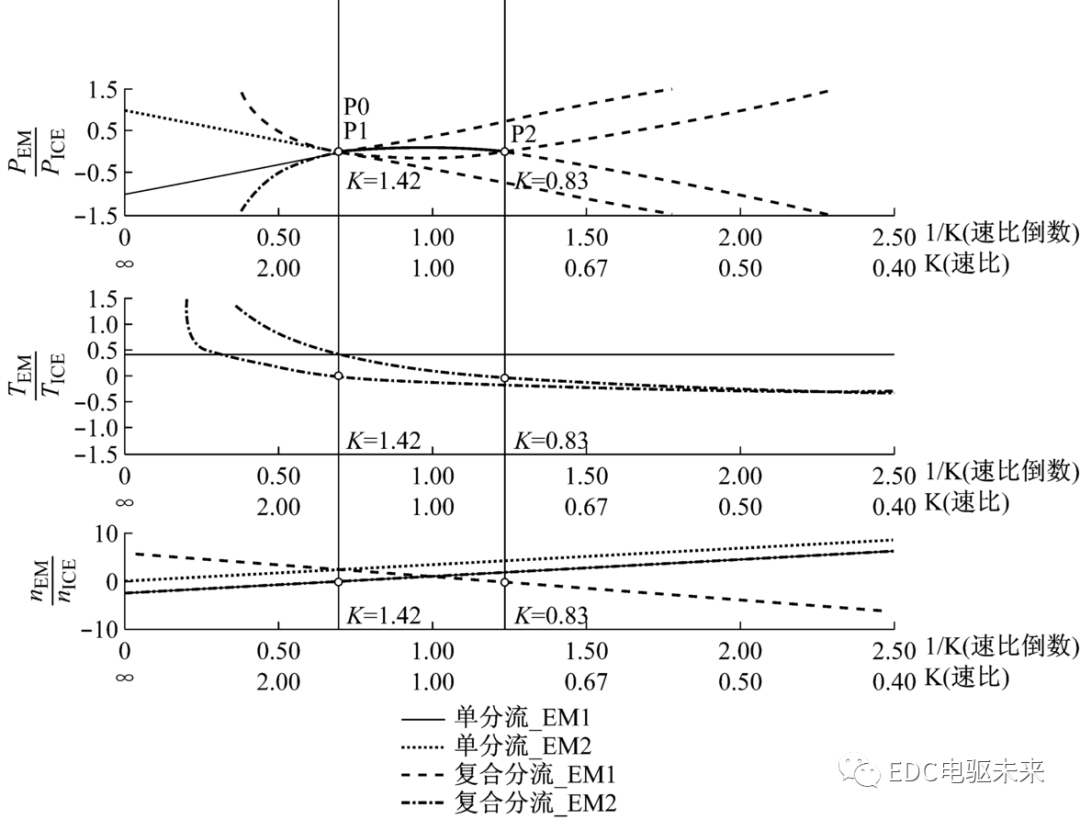
圖22 電機、發(fā)動機功率比、扭矩比、轉速比曲線
Fig.22 EM,ICE Power Ratio, Torque Ratio, Rotation speed Ratio
表1 Voltech2代分流模式節(jié)點電機功率、扭矩、轉速關系
Table 1 Voltech Gen2 EM1,EM2 Power,Torque,Speed on Knot
圖中虛線均表示低效率的動力回流工作區(qū)域:對于單分流模式來說,速比K小于1.42(P0,P1)為動力回流區(qū)域;對于復合分流模式來說,速比大于1.42(P0,P1)及小于0.83(P2)的區(qū)域均為動力回流區(qū)域。
因此,實際工作中在速比較大時系統(tǒng)應采用低增程(單分流)工作模式;速比小于1.42后切換至高增程(復合分流)工作模式,模式切換點即為P0,P1節(jié)點;車輛高速巡航時,系統(tǒng)可切換至固定速比模式,此時EM1不參與工作,EM2工作狀態(tài)可視情況而定。
在復合分流模式下的P1和P2兩個節(jié)點之間,可以看到兩個電機與發(fā)動機的功率相比單分流模式更加接近0,這就意味著發(fā)動機輸出的功率更多地用于直接驅動車輛,因此具有相對更高的混動效率。
3 豐田THS與通用Voltech 2代優(yōu)缺點分析
豐田THS 1/2代混動系統(tǒng)由一個簡單行星輪組成,無需離合器,機械結構極其簡單,因此材料和制造成本方面優(yōu)勢明顯。但其硬件結構決定了只能實現單分流混動模式,。
通用Voltech 2代由兩個簡單行星輪組成,同時還需要1個單向離合器和2組多片式離合器進行控制,機械結構上相對復雜了不少,對于變速器布置設計和制造都提出了更高的要求,因此制造成本上無疑更高,同時控制和標定也會更加復雜。但其復雜的機械結構帶來了單分流和復合分流兩種混動模式,使得其速比范圍可以做得更大,同時在復合分流模式下具有更高的混動效率。
4 總結和展望
本文從豐田THS 1/2代和通用Voltech2代的結構入手,分析了這兩套系統(tǒng)各自行駛模式下的動力流,并通過對其各自動力分流模式下的功率計算,比較了其理論上的混動效率的優(yōu)劣。
目前無論是國際上還是國內新能源汽車仍然處于起步階段,其發(fā)展方向很大程度上也取決于外部政策的導向。比如國內現在大力鼓勵發(fā)展插電式混動汽車,單電機并聯和雙電機混聯結構在“大電池”的協(xié)助下,回避了其混動效率較低的劣勢,同時發(fā)揮了其成本低、開發(fā)周期短、控制策略簡單等優(yōu)勢。
若在“不插電”這一假設前提下,動力分流的混動結構由于可以通過兩個電機解耦地對發(fā)動機轉速和扭矩進行調整,使其始終工作在最佳油耗區(qū)域,因此其相較傳統(tǒng)混動結構無疑具有更高的混動效率。
編輯:黃飛












 工商網監(jiān)
工商網監(jiān)
評論