 電子發燒友App
電子發燒友App


?一、自動駕駛的橫向控制需求 ?
自動駕駛的橫向控制需求和傳統的執行部件有些不一樣。在實際過程中,比如轉向或制動,目前國內研發中很多是逆向開發,或是基于當前狀態的開發,缺少一種正向開發觀念,所有的執行部件和線控部件都是為了滿足駕駛員或整車運動控制的需求。 ?
所以,在設計轉向時必須要有一種正向思維方法,不是去編輯MAC的校驗方式,而是從駕駛員的需求、自動駕駛的需求來設計線控部件。因此,首先要知道自動駕駛需要底盤做什么,或駕駛員需要底盤做什么樣的操作。 ?
目前,轉向的發展基本上分為兩個等級,一是小于等于L2的電動助力轉向EPS,但EPS中除了原先的輔助助力系統,還增加了一些線控接口指令。
還有一種是大于等于L3的線控轉向,現階段有它的特殊性,如果小于等于L2,失效時主要功能安全會關掉,是fail off。對于大于等于L3的狀態,就要fail-operationl,即在失效時能夠保證一定功能或降級功能,基本上具備轉向功能,這是一個非常重要的臨界點。 ?
軟件定義底盤
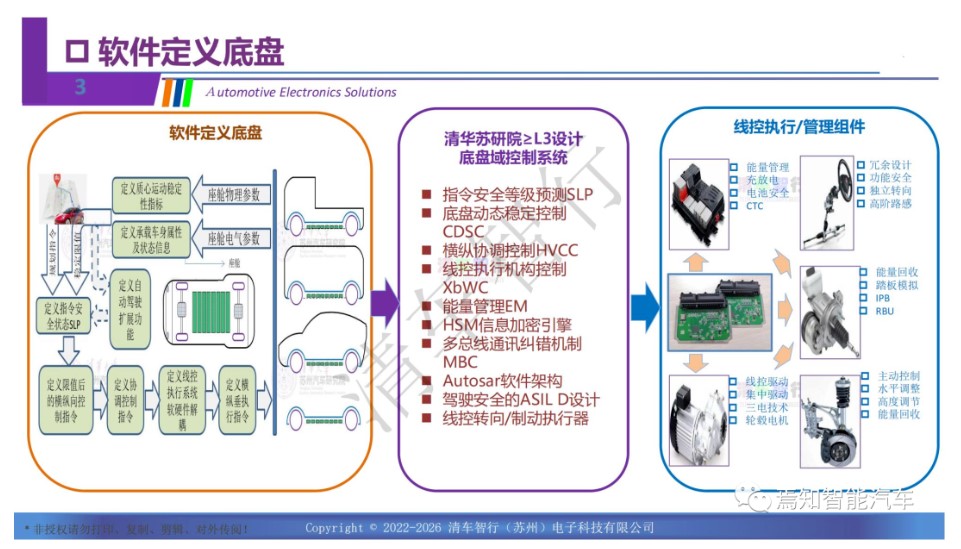
為了實現上述功能,提出了各種各樣的技術,首先要有一個正向思維,自動駕駛對底盤有一定需求,左邊的軟件定義底盤是我們研究院和清車智行提出的。
定義軟件底盤需要根據自動駕駛的需求或獨立移動底盤的需求。以后整車發展可能是底盤加座艙,即三域兩平臺,三域支持自動駕駛、智能座艙域和線控底盤域;兩平臺是智能座艙和智能底盤兩個硬件平臺。隨著智能座艙形狀的不斷改變,首先我們要定義各種座艙形態,即各種座艙的穩定性是要定義的指標。 ?
只有在這個指標下,再考慮自動駕駛的規劃指令,定義當前的整車是什么狀態,是穩定狀態還是失穩狀態,還是臨界穩定狀態,即安全等級預測模型,模型限定后,就可以最大限度地保證橫縱協調得到實際執行。 ?
橫縱協調指令出來后,還有軟件定義來定義執行系統的軟硬件解耦,因為底盤域是一個大的運算平臺和算法中心,底層轉向制動,甚至懸架和驅動相關的應用層算法都可以在平臺上不斷迭代,所以要進行執行系統線控和系統軟硬件解耦,再定義橫縱協調相關指令,同時軟件定義底盤還可以定義自動駕駛的擴展功能,這就是軟件定制底盤的需求。 ?
我們研究院基于大于等于L3的底盤域控,實現了涉及的安全等級預測、動態控制、軟硬件解耦的相關架構。右邊的線控執行系統對滿足底盤控制要求和整車要求提出了不同需求,特別是對轉向冗余設計和功能安全,包括高階路感的體驗要求,后期還有獨立轉向相關功能需求。 ?
從技術路線來說,是從軟件定義底盤到域,再到執行組件,在實際生產過程中,產品要落地,還要基于執行部件反過來倒推,以滿足一級一級的技術要求,這就是軟件定義底盤。 ?
自動駕駛分級

隨著自動駕駛和駕駛輔助系統的不斷成熟,自動駕駛的分級已進行了好幾輪優化。
最新版SAE駕駛自動化等級很關注L3如何實現,去年SAE明確提出L3時,在功能請求時必須由人駕駛,如果整車沒有請求,如果整車發生安全事故或其他危險時,責任在于整車;功能請求一旦發布,必須要有人直接接管,這之間的時間延時如何實現,各家有不一樣的觀點。
在安全風險預測方面,功能請求時,必須要有一定緩沖時間留給駕駛員進行相關操作,因為理論上,L3雙手可以脫離方向盤,腳可以離開制動踏板,甚至可以短時間閱讀手機/報紙。而當整車有自身所無法克服的安全風險時,向駕駛員提出請求,必須由駕駛員接管。 ?
在不斷實踐過程中,緩沖時間要不斷優化和更新,主要還是安全或風險預測的時間,或提前響應的時間,所以L3也是一個很糾結的階段,甚至有人認為應該是2.99或直接跳過L3,但L3短期內還是一個不可避免的過程,所以很多基于轉向的研究都是L3和L2之間或L3之間,L3內自動駕駛和手動駕駛直接切換是一個很大的考驗,自動駕駛和手動駕駛切換Switch Ramp處理方式很重要。 ?
到L4、L5時,也有一些典型狀態,L4還有方向盤,只不過是完全解耦的狀態,L5方向盤已經不存在。對轉向來說,各家主流研發目標和研發路徑也不一樣。歐洲有兩種,一種是到L4時就可以取消方向盤,換成駕駛終端,即操作手柄,進行緊急切換,也有的還保留方向盤,設計思路不一樣,所以當前階段還要考慮L3和L3到L2之間的Switch Ramp問題。 ?
橫向控制發展趨勢
什么是橫向發展?如果從自動駕駛的底盤控制層面考慮,以后可能有三軸方向控制,即橫向、縱向和垂向的三向控制,轉向是橫向控制中最主要的操作,包括自動實現轉向,所以橫向控制是后期發展的重要控制層面。
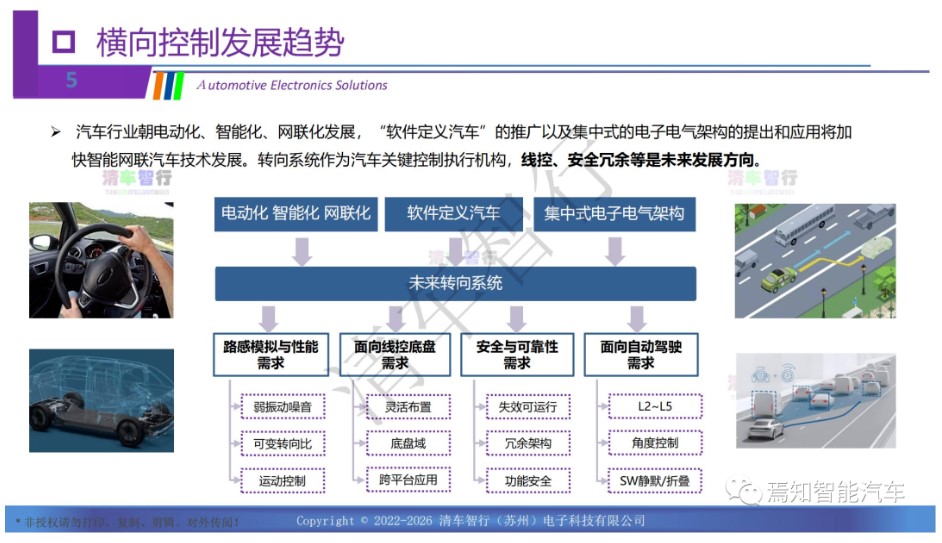
汽車行業向電動化、智能化、網聯化發展,軟件定義汽車得到了推廣,域控制電子電氣架構從分布式到域控制,再到集中域,甚至后期的中央電腦方式,不斷快速發展。作為關鍵的橫向控制機構,轉向系統是未來發展的方向。 ?
未來的轉讓系統會有幾方面要求,一是路感模擬和性能要求,L3到L4階段是很重要的階段,這時還有方向盤,而且是完全解耦的方向盤,這時會有一些要求,比如弱震動噪音減弱、可變轉向比、運動控制,都需要在路感模擬和性能需求中體現。 ?
對線控底盤的要求包括轉向和方向盤的靈活布置、基于底盤域的結合設計、跨平臺應用。從安全可靠性來看,有fail-operationl(失效可運行)、冗余架構和功能安全。自動駕駛方面,L2、L3之間的轉換涉及角度控制、方向盤靜默/折疊。 ?
自動駕駛等級對轉向的需求

自動駕駛對轉向的需求完全基于當前的自動駕駛程度,對轉向特點提出了要求,首先是從常規的0級到1級、2級,以駕駛員和駕駛員系統為主。常規的電動處理轉向選用單純的三相電機、獨立電源、位置傳感器和一個或兩個核的控制器,不一定有異構冗余,因為L2以下是fail off狀態,一旦發生危險或故障就會關掉。 ?
功能安全等級方面需要雙核功能,特別是在無法關掉時,必須要實現ASIL D安全等級,即必須關掉時必須要關掉。象限保護也是為了滿足ASIL D,出現相間短路、電機短路時能夠及時關掉,保證相關通訊、網絡安全、機械耦合狀態。 ?
到L3會有很大的變化,駕駛主體責任人是系統,整個EPS設計也就是線控轉向設計是冗余EPS執行機構設計。轉向系統已跨到線控轉向,其兩部分一是路感模擬,二是轉向制動控制或轉向執行,需要六相電機或雙電機配置,采用雙電源、雙TAS備份、三內核,當然也可以是兩個功能核,再加一個鎖步核,以保證功能安全級別和安全的實施。 ?
安全等級達到ASIL D,就必須要有異構冗余措施,有預期功能安全因子分析、象限保護、多通訊模式、硬件安全模塊模組,以保證相關的通訊,這時取消了機械耦合,但還有方向盤。 ?
到L4、L5,方向盤是可屏蔽狀態,甚至采用一些控制終端去實施。歐洲有兩種聲音,一是方向盤,二是終端,但美系和日韓系還是偏向于用方向盤,不希望用終端方式。 ?
底層執行機構軟件定義集成控制
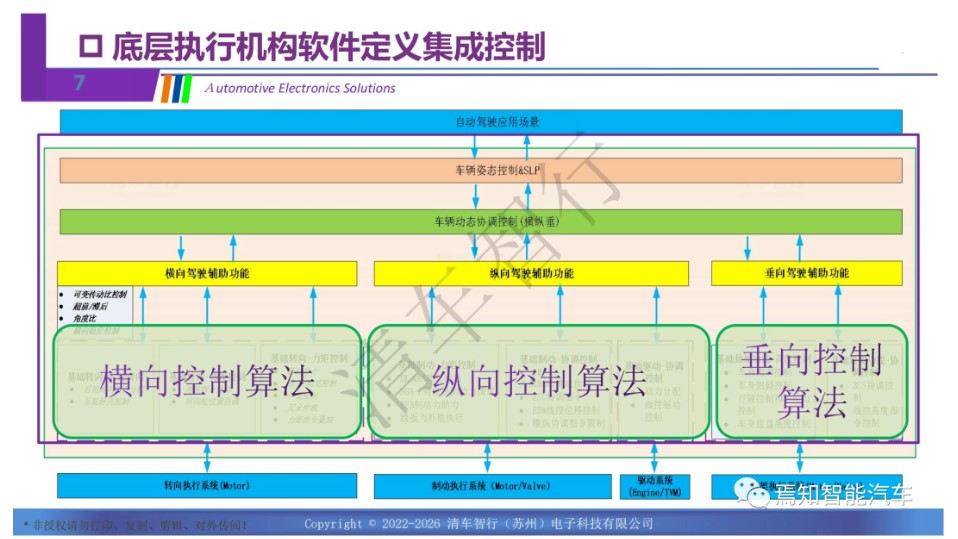
作為一個大的運算中心和算法平臺,底盤域是可以不斷地OTA迭代的芯片平臺,很多算法會上移。轉向系統會將應用層在1或2毫秒層面直接進行算法上移。
轉向系統以后只會保留電機控制、機械系統和轉向電機,特別是電機診斷實時系統,而應用算法都在底盤域中,所以給轉向行業的工程師提出了更高要求,需要具備軟件的軟實力和機構不可替代的硬實力。以后的商業模式將轉向系統廠商提供一套硬件系統,再加上打包的一套軟件系統,直接給整車廠或Tire 1進行集成。 ?
如何在這個過程中保證軟件附加值,是從事轉向行業的人需要考慮的事情。同樣,制動也是這樣,要增強軟實力和硬實力,有自己獨有的控制算法和一些專利保護,這些都會體現在后期的軟件附加值中。 ?
底盤控制軟件協調控制封裝組件?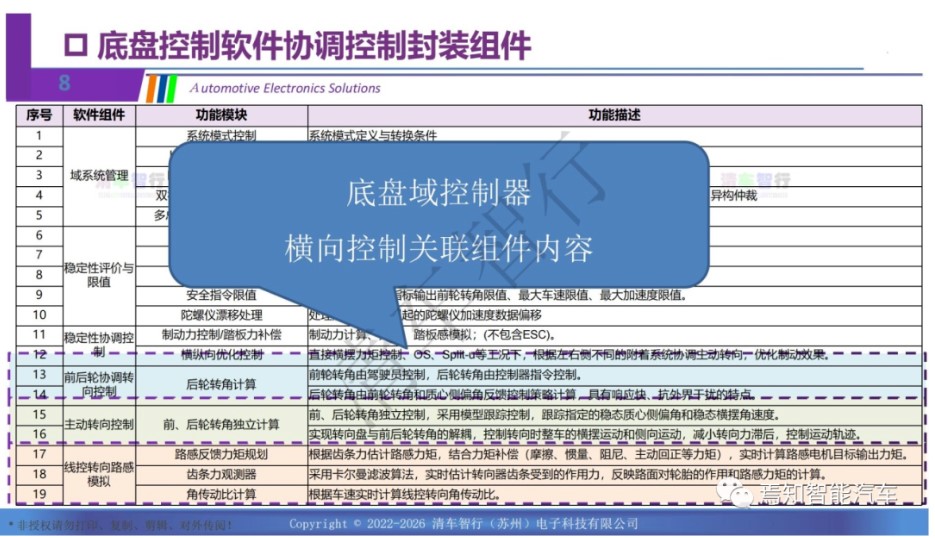
底盤域封裝組件和轉向相關的算法包括:前后輪協調轉向控制、主動轉向前后輪獨立運算控制算法和線控轉向路感模擬,這三塊是軟在底盤域中要上傳到封裝組件中。 ?
線控轉向軟件組件
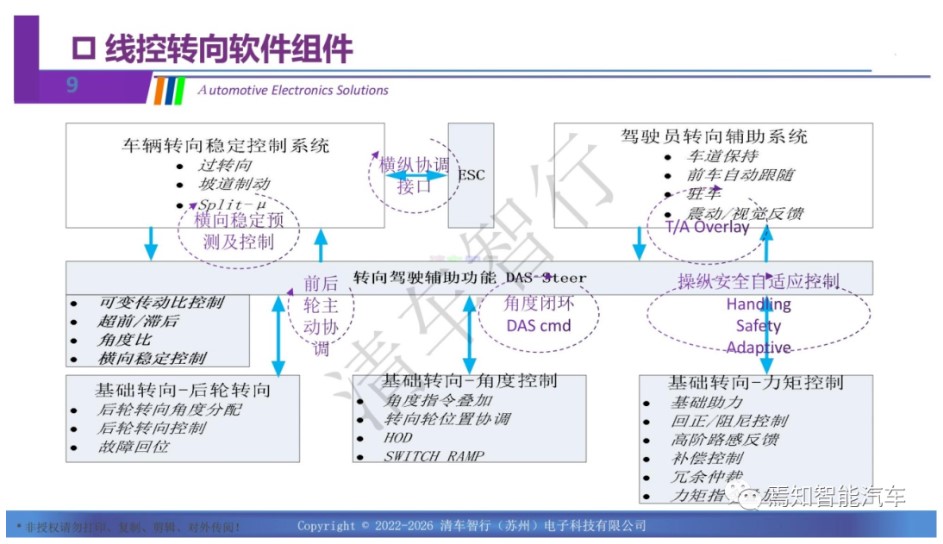
在AUTOSAR架構中,線控轉向軟件組件是SWC層面的軟件組件,每一個軟件組件都有相關功能描述,比如以正向思維設計轉向功能,駕駛員轉向自動駕駛、輔助系統功能,如車道保持,需要相關的扭矩接口、力矩接口或橫向齒條力接口,通過轉向駕駛控制模塊、線控轉向或EPS實現相應功能。 ?
這個模塊分成三部分,一是基礎轉向,側重人駕駛的力矩控制,因為不管是L2還是L3都有方向盤,涉及基礎助力,只不過會呈現在路感模擬中。通過分析齒條力的大小和路感波動,體現在路感方向盤的力矩控制。 ?
同樣,還有回正和阻尼控制、高階路感反饋、補償控制、冗余仲裁和力矩指令疊加,以及角度控制,因為目前自動駕駛更流行通過目標角度或目標角速度達到目標角度的精確定位、角度控制和轉向輪位置協調,實現脫手控制、手動/自動駕駛切換或L3向L2切換等。角度控制可以讓駕駛員主動接管或被動接管整車有一個安全過渡。
另外,后輪轉向控制算法在很大程度上依賴前輪轉向實現,后輪轉向是一個執行器,這個過程中還涉及前后輪主動協調。
橫向控制不單是方向盤轉向控制,還有縱向控制,比如過轉向、坡道制動、對接路面等,如何保證更好的制動效果,或在轉向失效或異常時保證緊急轉向的實施,涉及轉向和制動的協調控制。 ?
通過進行協調控制,比如在過轉向或在坡道制動時,會有一個主動轉向過程;在轉向失效時,會有一個強制轉向或差速轉向過程,以保證整體轉向制動的協調,最終達到轉向效果。 ?
橫向穩定控制流程
?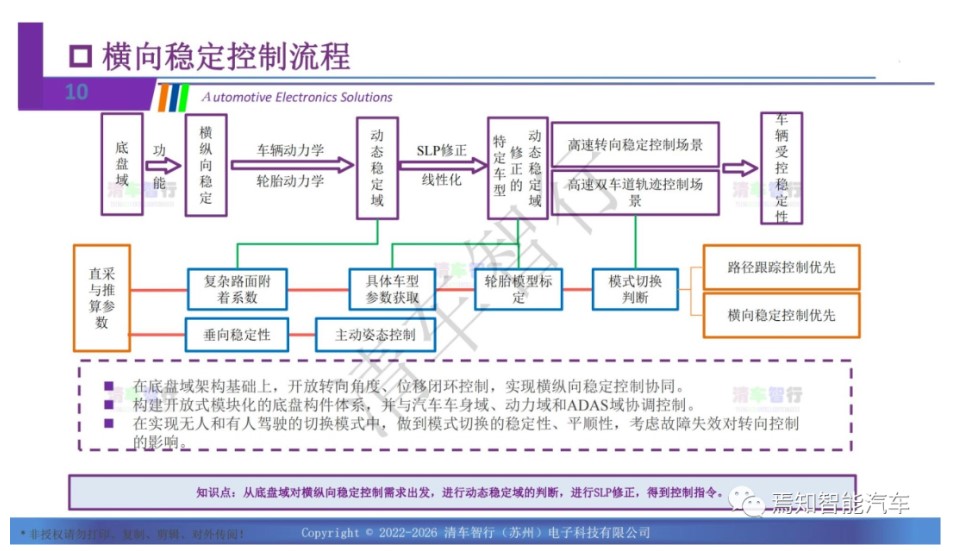
橫向穩定控制流程是從底盤域基礎上實現的橫縱向穩定性,根據車輛動力學和輪胎動力學,對輪胎附著系數進行修正。根據線控底盤發展路線圖,2025年前,主要是研究輪胎的橫向和縱向控制;2030年后,會進行橫縱垂相關的研究。基于橫向縱向主要進行車輛動力學和輪胎動力學相關研究,以得出動態穩定域,通過安全等級限制進行修正,得到相關指令,再進行車輛受控穩定性研究。 ?
整個過程和路面附著系數、車型參數、輪胎模型相關聯,所以橫向穩定控制要考慮自動駕駛、整車動力學穩定性需求,以及操縱穩定性指標要求、輪胎動力學要求,還要考慮轉向制動如何協調,所以單純看轉向,有很大的局限性,但如果從橫向角度去看,很多東西可以在前期進行知識儲備。 ?
線控轉向組件關鍵參數

主流線控轉向組件目前有兩類,一是搖臂式,比如商用車;二是齒輪齒條線控轉向器。上圖是路感協同管柱,取消了中間軸,構成一個完全解耦的線控轉向部件。另外,還有方向盤隱藏或收縮機構、路感協同器、轉向執行器。2010年之前這種設計比較少見,基本上都是分離的,2010年后,功率組件形式逐步成為主流,因為環境惡劣,控制器的設計指標、穩定性要求越來越高,需要與執行電機集成在一起,容易受到EMC干擾,也容易受電機發熱的影響。 ?
一般過了三年期,電機會出現很多問題,前期是控制器出現問題,在大批量生產中有一些體現,需要有控制精度要求、響應時間要求和齒條力估算要求。隨速轉向基本上采用AUTOSAR架構,用ASIL D等級要求約束,包括最大轉速要求和平順性相關要求。 ?
商用車線控轉向
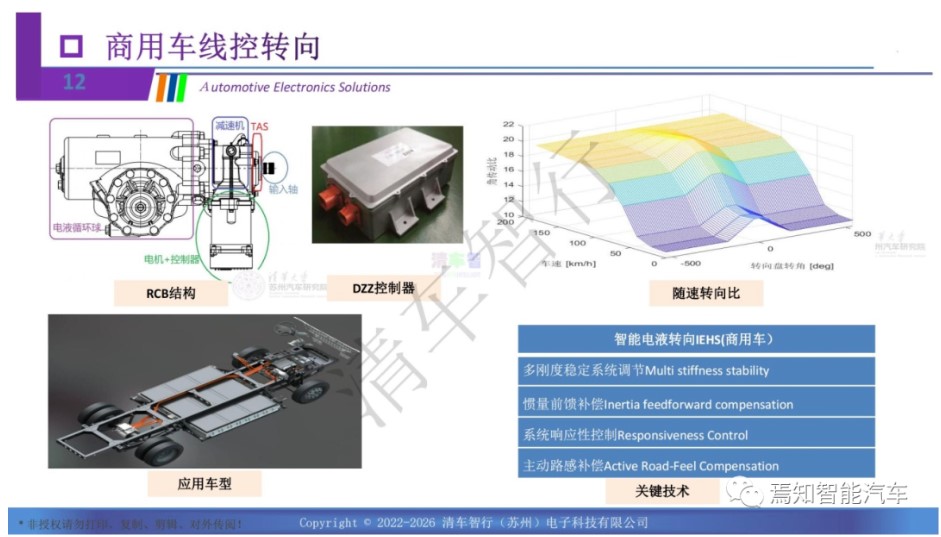
商用車轉向原來基本上是循環球占主導,但研究思路逐步拓展,不管是轉向和制動,目前電動助力轉向最大的改進就是去掉了液壓,實現純電動助力轉向。商用車目前還是以液壓助力為主。 ?
液壓存在維護困難、安裝困難、響應困難和控制困難幾個難點,如何取消商用車轉向中的液壓,國內外都在研究,一些企業已將它列入計劃,如舍弗勒、采埃孚,都在做這方面的研究。 ?
隨速轉向比因車速而異,智能電液需要相關的額外補償系統,比如多剛度穩定系統。因為助力方式不單是電機助力,還有手助力、液壓助力、輪胎反彈力等不同來源,所以要把多剛度系統調制成一個穩態系統。
如何通過慣量前饋補償來增強系統的響應性和換向的快捷性也很重要。因為商用車質量過大或慣量過大,或在減速比過大時,會影響路感體驗,如何進行主動路感補償也是商用車轉向要考慮的關鍵問題。 ? ?
二、線控轉向軟件架構 ? ?
線控轉向軟件架構與底盤安全架構基本上類似,線控轉向一方面要實現自身功能,另一方面要滿足功能安全fail-operationl需求;第三是在這個平臺上有不斷迭代可升級的空間,這些都對轉向軟件架構提出了相關要求。 ?
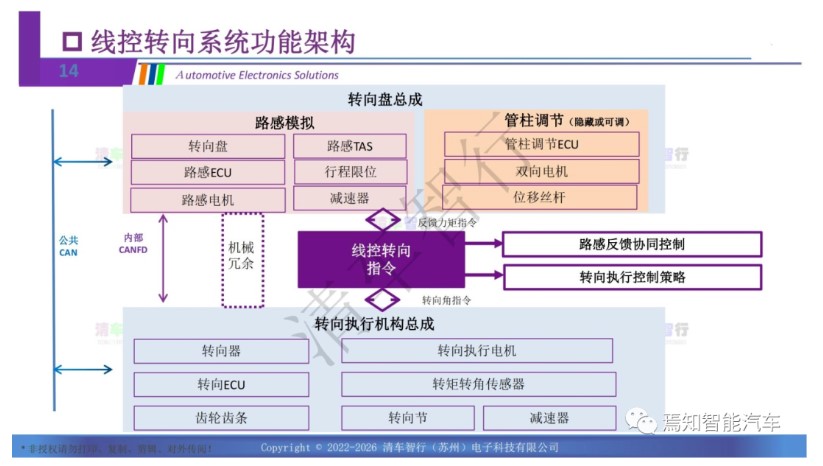
線控轉向系統功能架構
?
線控轉向分為兩部分或三部分,一是轉向盤總成,其中有兩部分:路感模擬和管柱調節,管柱調節可能是隱藏或可調式,對轉向盤總成有相關的要求,涉及一些相關部件;而轉向執行機構總成涉及主流的滾動絲杠方式,也有四輪獨立360度角模塊或±90度角模塊轉向機構。這些系統與自動駕駛安全等級的滲透率需求直接相關,滲透率越低越難落地。國外也發布了路線圖,在2024年/2025年會推出整體L3或L4駕駛,所以對線控轉向提出了很高要求。 ?
當然,這種系統在L2時也有一些應用場合,技術的足夠成熟必須要有很多市場反饋的數據樣本來進行驗證,其在L2中的優勢包括隨速減速比,比如低轉速時掉頭,打很小的角度車輪就可以達到最大角度,可以很快捷輕便地掉頭、轉向。雖然有一點需求,但其成熟度必須有大量的市場售后數據支撐。 ?
線控轉向冗余架構
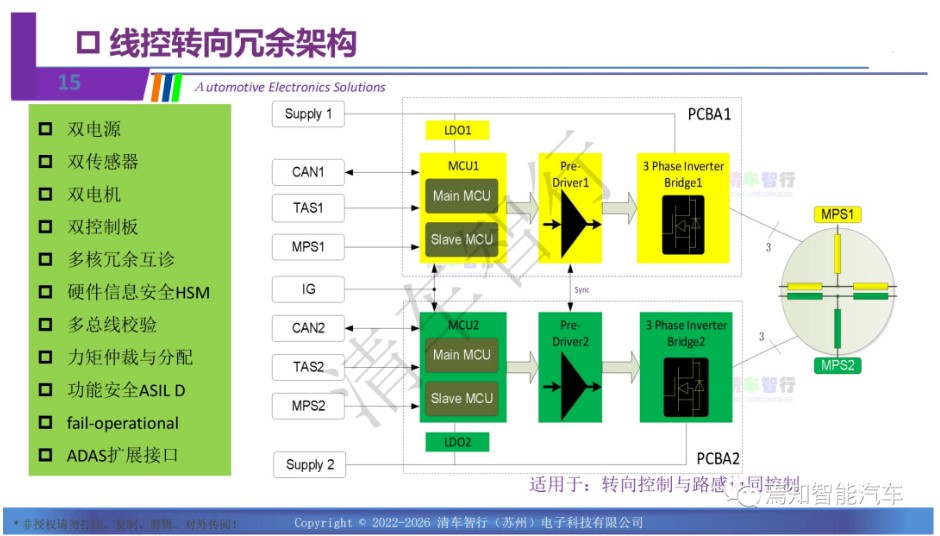
冗余架構更側重硬件層面,但軟件離不開硬件,所以要在硬件冗余架構配置基礎上去做相關開發,而不是完全脫離硬件系統,或脫離底層軟件。因為兩者畢竟是硬件載體和算法載體,涉及雙電源、雙傳感、雙電機、雙控制板、多核冗余。 ?
基于功能安全,一般功能核要再加一個鎖步核,在單系統中,可以滿足ASIL D要求,但對冗余架構fail-operationl要求來說,就要對功能核進行劃分,兩個功能核再加一個鎖步核進行相關實施,也就是三核。 ?
隨著信息安全要求,硬件信息安全也逐步提上日程,當然需要成本比較高的一些工程支持和工具鏈。多總線校驗、力矩仲裁和分配也是雙系統要考慮的問題。功能安全要求也必須滿足,不能在失效后野蠻地把電機關掉,把域區關掉,把MCU輸出關掉,把電源關掉關,而對大于等于L3來說,還要有部分助力或降級助力,甚至是全部助力,ADAS擴展接口要預留。 ?
這套架構不單滿足轉向執行,也包括路感協同。從安全級別來講,路感協同不僅是方向盤控制和助力,功能安全還有更高的要求。在實際項目和案例中,功能安全級別、整個軟件架構和轉向控制是同樣的級別要求,甚至某些場景安全級別要比轉向控制場景更高。 ?
兩路相關系統涉及之間的校驗和仲裁,如何進行互相診斷和信息互相校驗也是比較重要的內容。 ?
我們申請的一個專利中,在兩塊硬板之間有一個柔性電路板,通過它實現100兆到200兆通訊速率,在關鍵算法層面采用單步校驗,而不是用接插件。接插件有損耗、干擾,對高頻信號有影響。很多高頻信號、串行信號都是板級通訊,而不是板和板之間、同板的通訊。在設計過程中,做了很多項目實例,通過兩層之間的接插件實現的冗余系統成功率不太高。 ?
線控轉向軟件安全設計方法
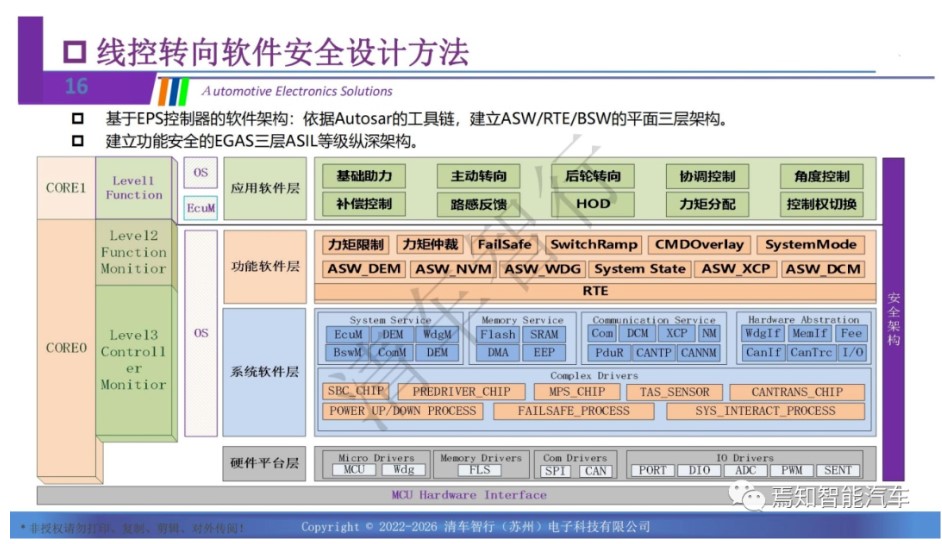
根據AUTOSAR工具鏈,建立了從ASW到RTE到BSW的平面三層架構。在這個過程中,如何對EGAS的功能安全三層架構進行縱深配置,將整個軟件架構構成一個多維度設計方式非常重要。其中有相關設計技巧需要不斷討論,比如一些功能究竟放在哪一個核中,哪一個核作為功能核或監測功能的核,如何實現相互校驗。 ?
在不同核中,核與核之間的通訊,核與核之間的校驗如何快速響應,也是實際底軟配置中要考慮的問題,因為有的單片機滿足不了這種設計需求。 ?
線控執行系統功能安全冗余架構
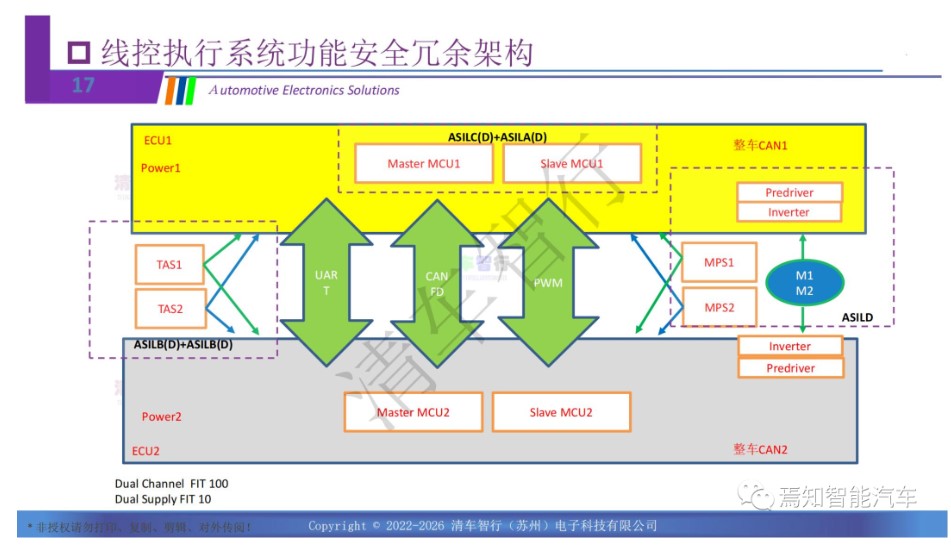
從功能安全層面講,需要ASIL D等級的雙備份系統,而不是一關了之的架構,需要失效時能夠運行,比如雙路pass的交互,需要滿足ASIL D的要求,其中的Master和Slave MCU也要滿足ASIL D的要求;域區和芯片也要滿足相關要求,執行系統采用六相電機來滿足ASIL D的要求。 ?
整體架構理論上可以滿足FIT 100要求,即10的9次方小時中所發生的錯誤次數或個數。根據理論算法,有很多數據支撐,特別是國外的數據,可以達到FIT 100,雙電源達到FIT 10。 ?
實際上,功能安全涉及很多內容,有很多依據,比如安全等級的制定、風險概率,國外做的比較完善。美國的很多交通事故數據分析很詳細,比如某一次交通事故由什么問題引起,是轉向制動,還是方向盤,或者是轉向失靈、不可控,都有詳細的說明,有足夠的樣本或數據反饋。在國內這些數據很難取得,所以很多還是依靠國外的數據,特別是危害程度分析國內還比較欠缺。 ?
單純把國外的樣本拿來有一定局限性,功能安全不斷往前發展,采集足夠的樣本后,才能理直氣壯說滿足了ASIL D,系統是否達到FIT 10和FIT 100。 ?
模式轉換與多輸入接口
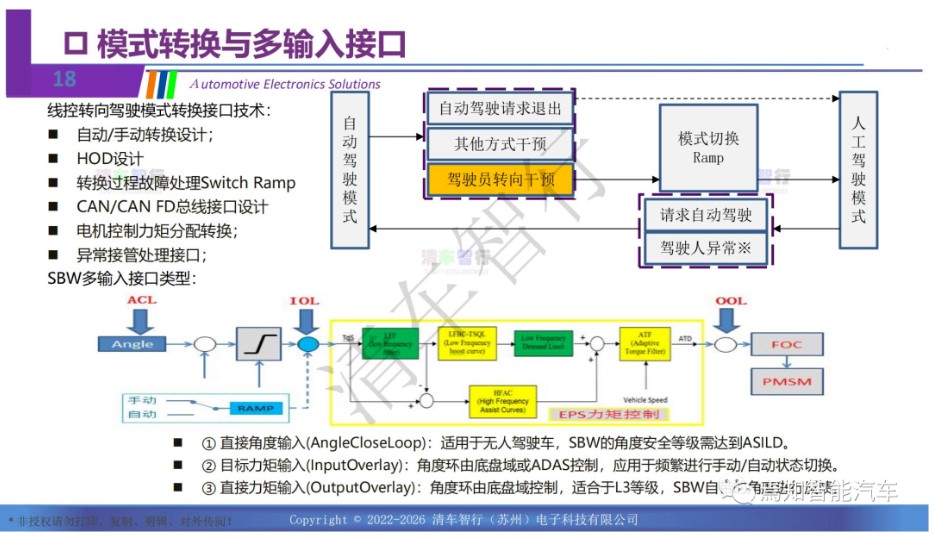
自動駕駛模式下的線控轉向涉及駕駛請求、其他方式干預、駕駛員轉向干預和模式轉換。最重要的是在轉換過程中保證安全,如果沒有安全保證,風險就很大。特別是在L3向L2或自動向手動轉換過程中,如果發生故障,如何處理是需要研究的問題。 ?
指令需求包括直接角度輸入、目標力矩輸入和直接力矩輸入,也包括齒條力估算需求。現在,線控系統中的接口多樣化,也要進行研究或預留。 ?
為了滿足線控轉向的關鍵技術要求,L3需要基本助力轉向,而雙系統有管理、仲裁分配等相關需求,在實際過程中需要研究一些關鍵技術。 ?
路感協同控制器架構,包括方向盤協同控制、齒條力觀察器、可變角傳動比。在這方面,需要研究如何把軟件架構搭建好是整體軟件架構要考慮的問題。 ? ?
三、冗余系統的互診與仲裁 ? ?
雙系統基本上是基于硬件,中間部分基于軟件。冗余系統的互診和相關仲裁涉及硬件和軟件。 ?
冗余系統協作機制
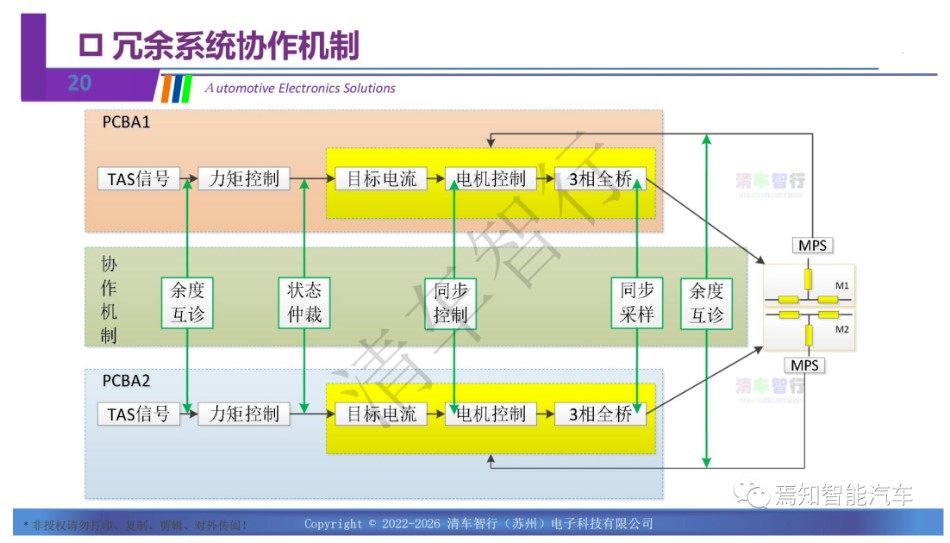
協作機制包括多余度互診、狀態仲裁、同步控制。目前,典型同步控制是為了實現六相電機更低 的噪音、更低的力矩波動和更高的效率。現在行業典型的是三同步:采樣同步、調用電機算法時間點同步、PWM輸出同步,都需要考核。 ?
沒有同步,就不能更好地控制噪聲和波動。遵循三同步來實現相關設計,可以實現相關MPS余度互診,當一個MPS出現問題時,另外一路可以實現診斷。兩個MPS有一路丟失了,這時是什么狀態,安全級別如何,也是要考慮的問題。 ?
任務交互
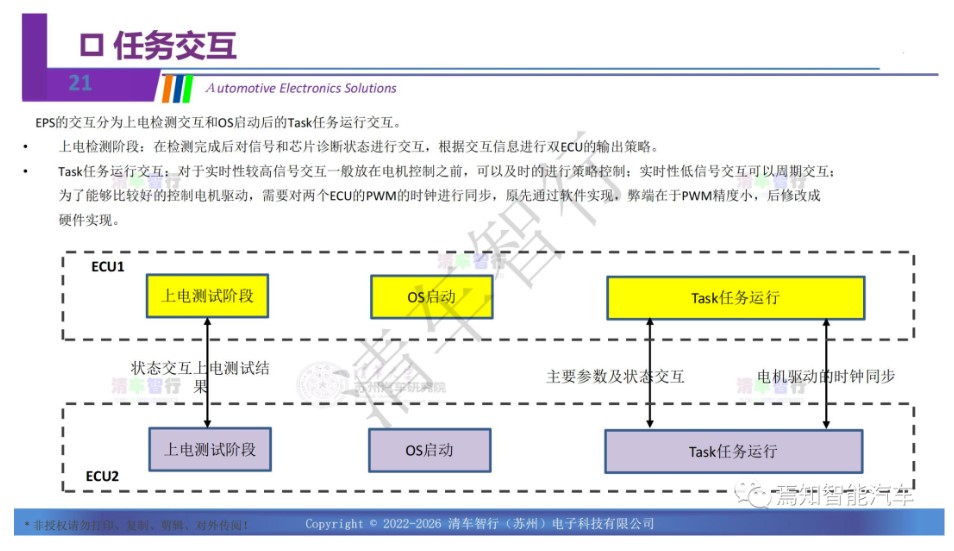
在上電檢測階段,車只要不動,轉向壞了,對安全級別要求都很低;即使短路,只要不起火,轉向亂動,也不會構成人身危害;而車一旦動起來,安全需求就非常強烈,因此要把工作做在前面,在上電測試階段的模式控制最為關鍵。 ?
所以不要抱怨,上電檢測要300毫秒、550毫秒,這是為了后期更好的安全著想,上電檢測的東西多才能保證安全,比如上電檢測最起碼要做上一次駕駛周期的狀態回調,還有當前狀態的扭距、角度、域區、傳感器,甚至車速信號的實時檢測。 ?
線控轉向的余度設計

余度設計分為片內和雙系統,還有一部分是機械,比如片內單核、多核冗余;雙系統中信號互診、主從仲裁、雙電源、雙電機、冗余機構、雙總線,這樣的設計對整體余度設計提出了要求,要滿足相關類型和冗余交互的要求。在做設計時,要在整個架構中把上述內容提前設計好。 ?
通訊的冗余交互
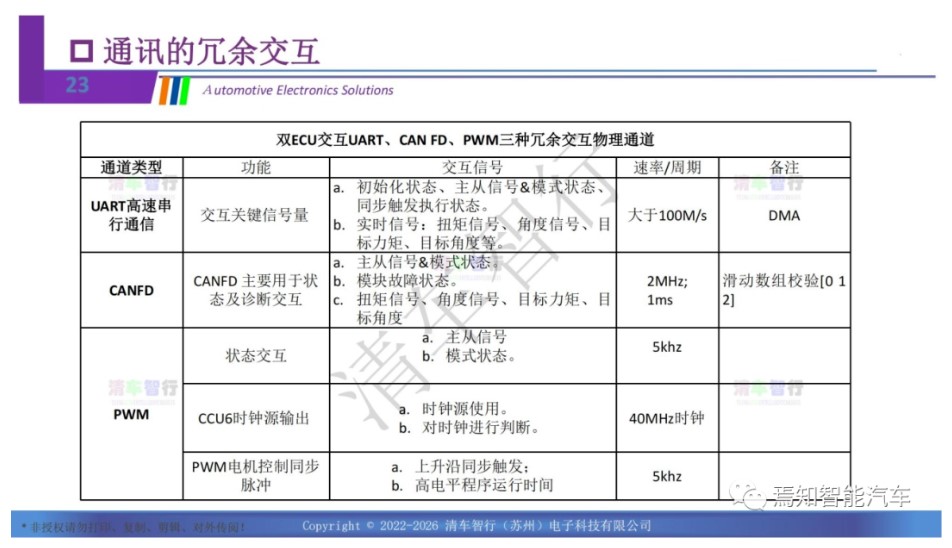
因為是fail operational,需要三種通訊的物理通道,一方有問題要能及時識別,還要知道是什么樣的問題,然后辨別出自己的問題,還要辨別出是不是該方自己辨別出了自己的問題,第三方也要清楚當前的狀態。所以提出了三種冗余交互的物理通道,為了實現安全級別,通訊級別提的更高。 ?
線控系統力矩仲裁與分配
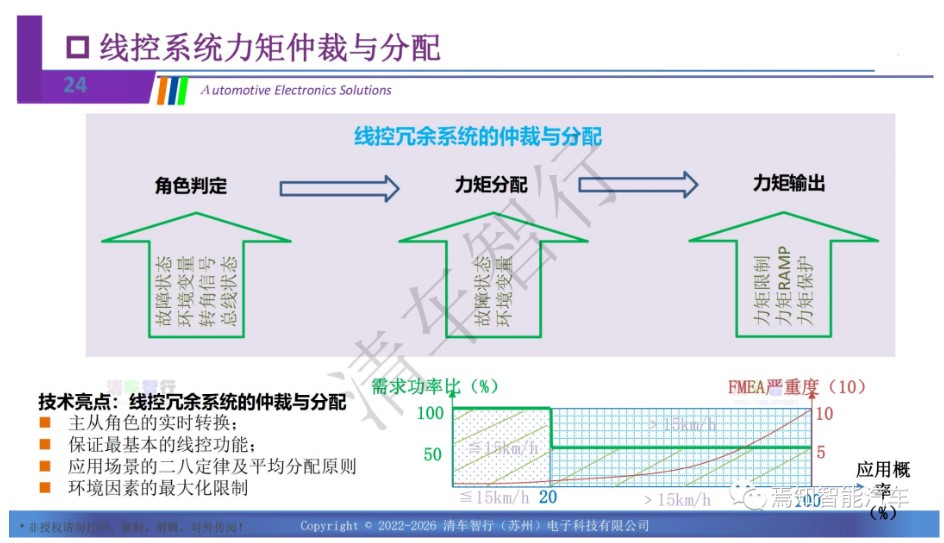
這個過程還涉及仲裁和分配,雙路輸出不可避免地需要仲裁,分清主從,以誰為主。如果發生一些故障怎么識別,比如CAN總線或車速信號發生問題,但電機驅動正常,就要利用驅動功能;同樣道理,如果電機驅動有問題,可能整體上就會關掉。 ?
異構設計在功能安全中,特別是線控轉向過程中非常重要。冗余設計有兩種方式,同構是投票機制,必須是3、5、7奇數決定哪一個為主,數據是不是準確,所以不可避免造成硬件成本增加。異構機制是仲裁機制,即根據結果程度,或模型預測方式,分析后果如何,做出決定。異構可以降成本,但算法比較復雜,因此在異構設計中,要進行相應的評價,再進行一個安全的執行。 ?
整個設計是從軟硬件異構方面進行互補,單純靠軟件實施效果很差,用雙傳感實現監測,以后果嚴重度作為一個評價標準,再來實現安全的執行。對于很多可能會導致安全事件發生的危險事件,寧可判斷失誤,也要去執行。 ? ?
四、路感協同技術? ??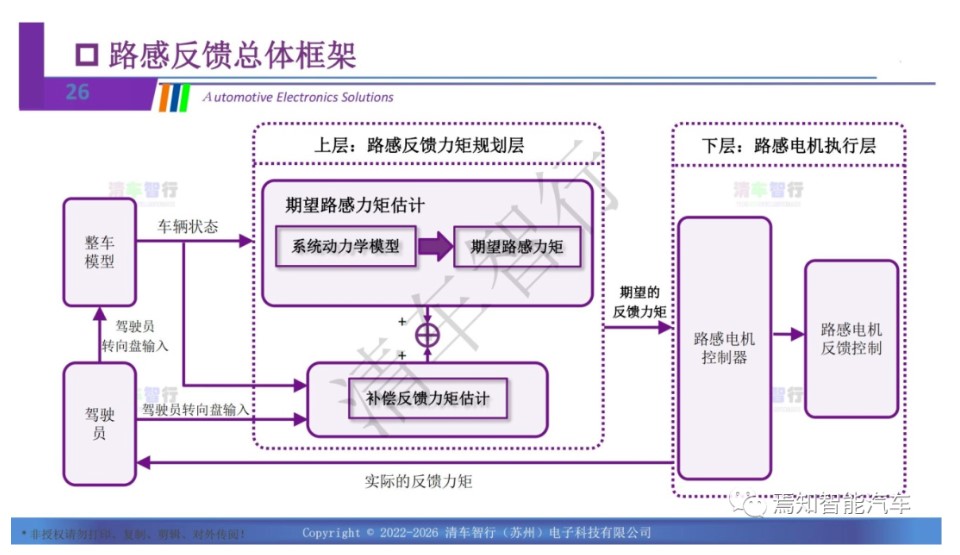
路感協同技術涉及齒條助力的控制,比如DP-EPS助力控制器,上面是手感控制器。在這個過程中,需要通過某種方式來實現交互,通過信號體驗路感、手感的輕重,體感路面的波動。 ?
從駕駛員、整車模型到車輛狀態進行期望路感的時間估算,利用動力學模型、相關補償得到期望的反饋力矩,進行路感電機控制和路感電機的反饋控制,通過這兩個層面進行路感總體控制。 ?
路感模擬器系統技術要求
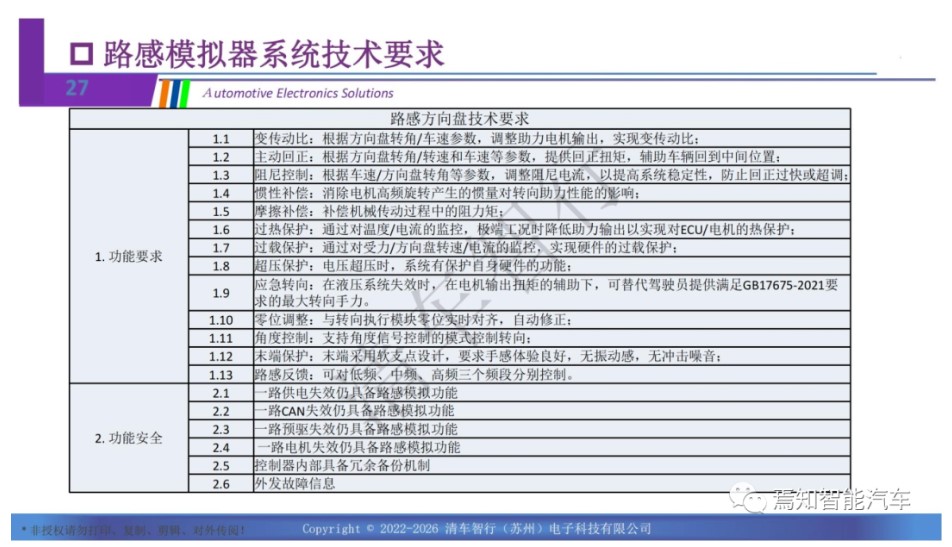
在路感反饋和角度控制閉環中,包括路感協同控制器和助力控制器,之間的相互關系是通過電機力矩和齒條力相關位移角度來估算,不但呈現力矩的大小和齒條力的大小,還體現低、中、高三個頻段波動的影響。將齒條力估算代入控制算法,最終得到相關運算結果——可變轉向比的關系,實現路感和協調控制。 ?
根據相關要求,比如路感、方向、可變傳動比、主動回正、穩態助力控制、慣性補償、摩擦補償、過熱、過載、超壓、應急轉向、零位調整、角度控制、末端保護、路感反饋等,其功能安全的級別比EPS和RWA更高。 ?
其他相關指標包括:響應性、分辨率、延時時間、反饋周期、響應精度、超調量,齒條力估算精度,都是路感模擬器的要求,整體研發周期不會比EPS或RWA低。 ?
齒條力濾波器
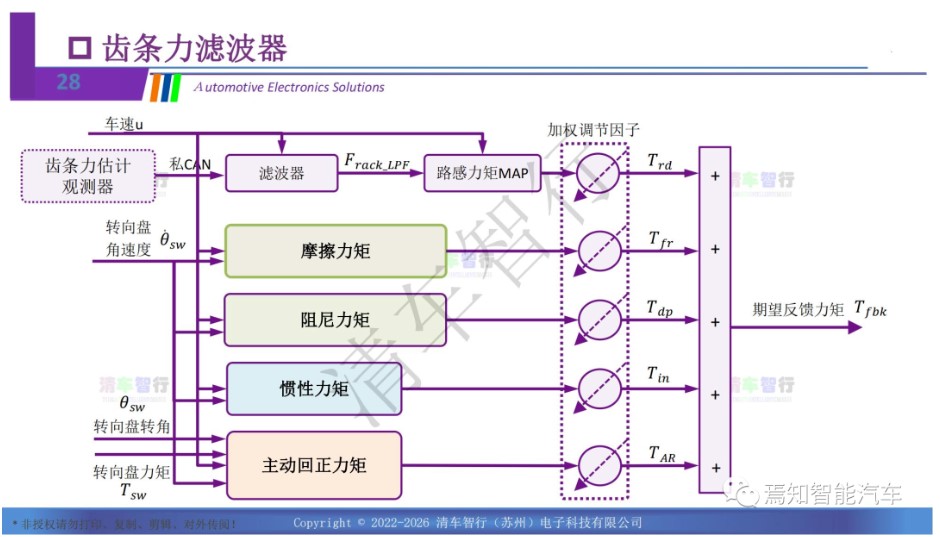
齒條力濾波器通過齒條力估算器、觀察器、私CAN,進入濾波器、路感力矩MAP,通過轉向盤角速度和車速計算摩擦力矩、阻力力矩、慣性力矩和主動回正力矩,以得到期望的反饋力矩,再由路感電機來執行。 ? ?
五、線控轉向測試與評價 ? ? 在
線控轉向關鍵組件及其測試與評價方面,目前國內外都是企業標準,都不是太詳細。 ?
操縱穩定性評價指標
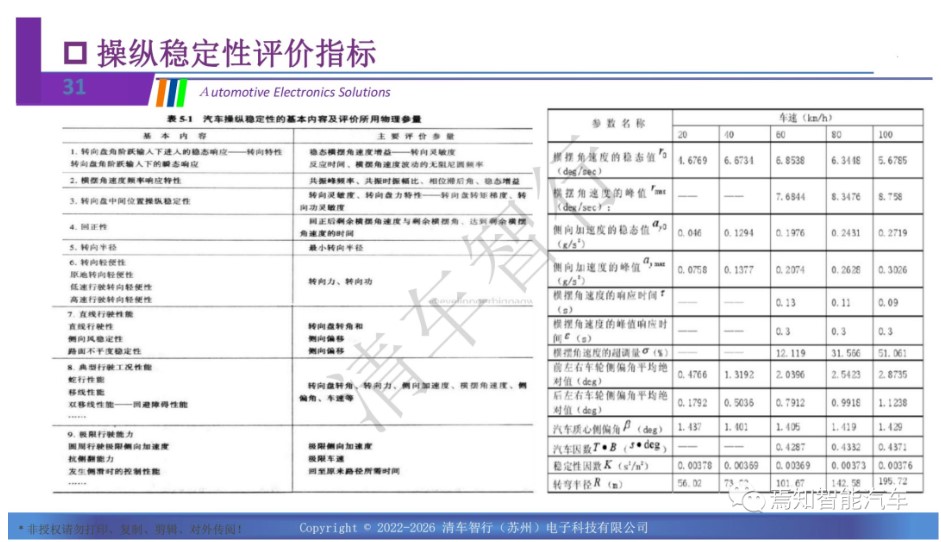
主要有兩個方面的標準,雖然各企業制定的標準不一樣,但不外乎兩種來源,一是基于轉向相關的操縱穩定性指標要求,或來源于自動駕駛,比如車道保持、APA等,或駕駛輔助系統層面對轉向系統的要求,所以評價指標主要是自動駕駛指令要求和操縱穩定性。 ?
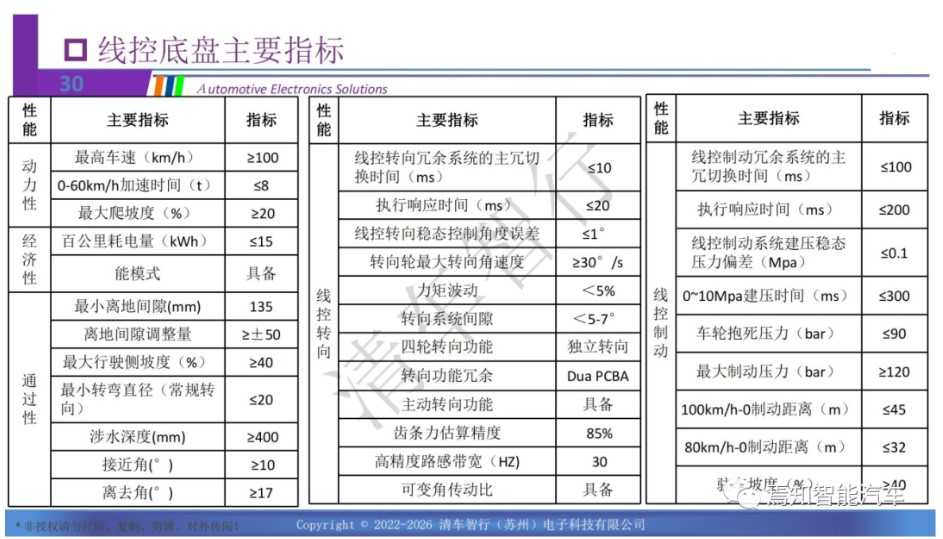
線控底盤主要指標
?
從底盤角度來說,動力性、經濟性、通過性是線控轉向和線控制動相關的主要指標,當然各個整車廠之間的指標都不一樣,出發的層面不一樣,一些自動駕駛需求和算法不一樣,所選的執行機構也不一樣,導致這些指標有所差異,但基本上都是相關的要求。 ?
底盤域集成設計測試工況
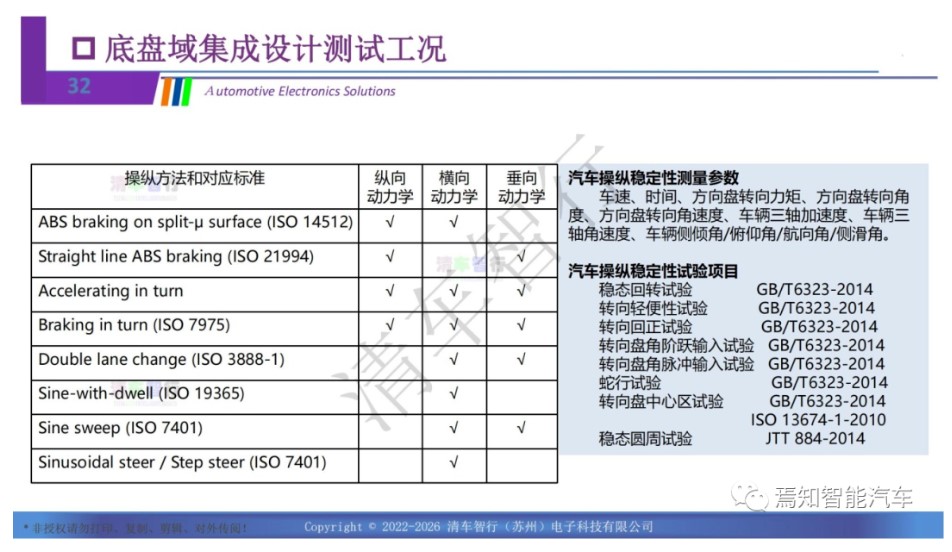
操縱穩定性評價指標依據的相關標準是集成測試工況,比較典型和轉向關聯性非常大的是穩態回轉、轉向輕便性、轉向回正、角階躍和角脈沖,以及車輛的時域和頻域測試、蛇形試驗、中心區試驗,都是動力學或運動控制經常要做的幾個測試。 ?
SBW和EPS力矩階躍輸入信號響應測試
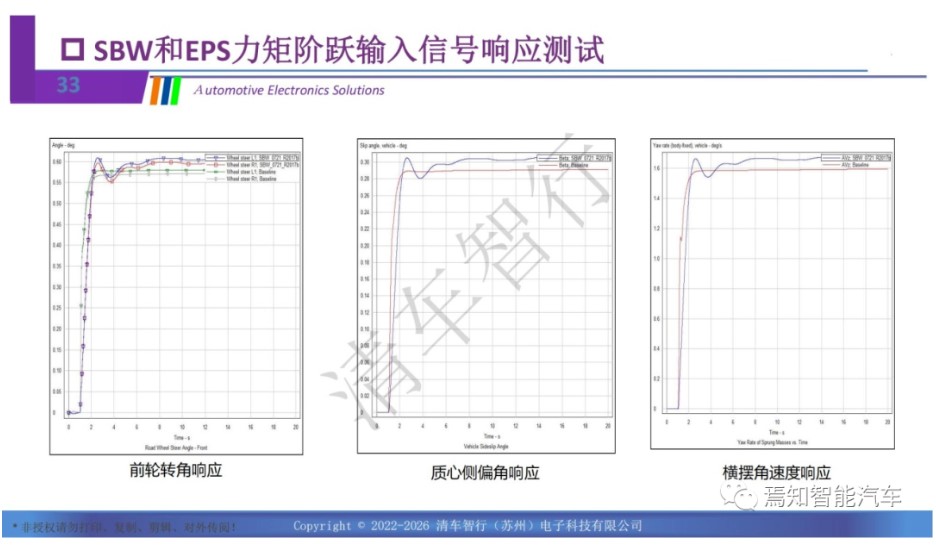
?對一個系統來說,都是圍繞時域和頻域做相關研究,兩者有不同的案例和輸出要求。比如在做階躍時,要看實際響應性,對車身穩定性指標是什么要求,特別是前輪轉角的響應,比如路感模擬器方向盤打到一個角度,輪胎響應的角度,都可以探討。 ?
SBW和傳統的EPS包括帶中間軸和不帶中間軸,要看對系統響應指標的要求是好是壞。一方面,增加中間軸會有一些空間間隙的自由度,用線控轉向路感模擬會有算法的滯后,需要進行齒條力估算,再去做各種濾波才能得出結果,然后通過總線傳送給輪胎,需要實際做一些仿真和測試。 ?
系統正弦信號響應測試
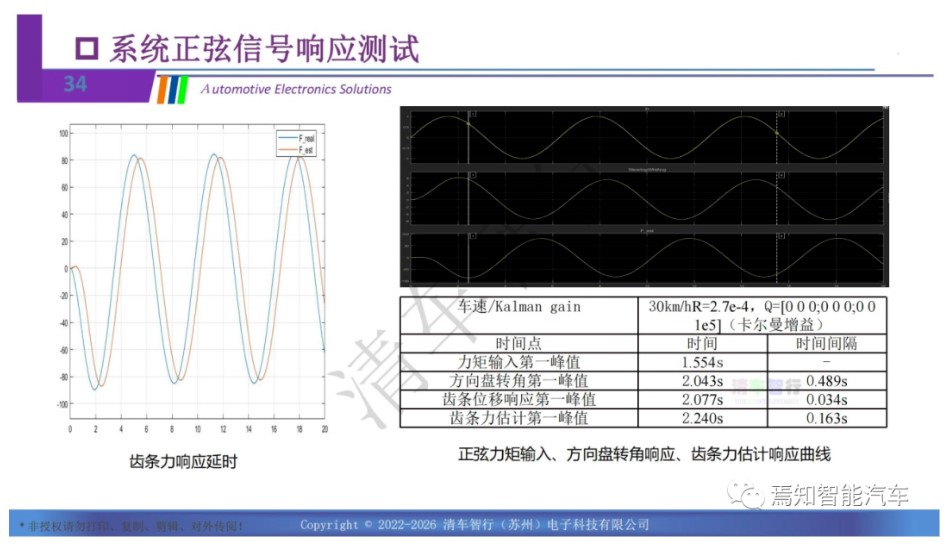
從正弦信號輸入可以看到帶寬多少,帶寬內時間間隔或滯后性是否是設計合理。當然,設計的算法不一樣,比如經常用的卡爾曼濾波估算,可能會影響時間間隔,如何把時間間隔縮短,讓系統穩定,在實際標定過程中需要考慮,在仿真過程中也要注意。 ?
雙移線工況驗證評價
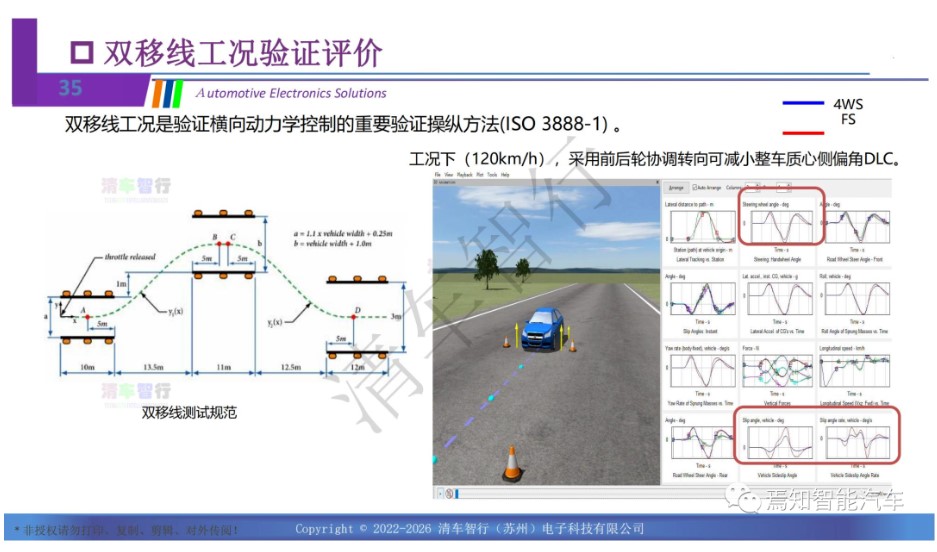
轉向是一個圓周運動,雙移線工況要做相關的測試,EPA狀態、前輪轉角狀態、前后輪轉角狀態、四輪獨立狀態都要做雙移線測試,與規范做相關對比,才能得出整個系統測試的結果。 ?
線控部件測試平臺

這是我們研究院開發的相關測試部件和平臺。 ?
線控底盤HIL臺架測試內容

新搭建的線控底盤平臺可以實現線控轉向、線控制動、底盤域等功能安全相關測試。整個測試場景基于智能駕駛功能安全進行設置,同時還開放了一些遠程接口,比如長春、深圳或重慶的客戶都可以客戶可以通過遠程客戶端接入,做相關的測試,在客戶端反饋數據。目前的測試對象包括制動轉向和底盤域的相關測試。 ?
以上五個部分都很重要,都可以拿出來進行更詳細的探討。 ?
審核編輯:劉清









 工商網監
工商網監
評論