

















PSoC傳感器應用平臺
在嵌入式系統中,控制芯片主要處理兩大類型的信號,一種是數字信號,另一種就是模擬信號。模擬信號通常來自于傳感器。要從這些模擬傳感器中獲得準確的信號并不是一件容易的事情。模擬的輸出信號通常振幅比較小,所以需要一個信號放大器。信號放大后,噪聲會也被放大,又需要一個模擬的低通或帶通濾波進行濾波。如果多種傳感器同時使用,還需要一個模擬的MUX。除此之外,還可能用到比較器和D/A轉換器。
傳統設計中,控制器只用來實現處理數據、系統間的通訊和控制功能。如果您的設計也用這種傳統的方式,就會面臨一些挑戰。這些挑戰主要來自于分離的模擬器件和固定功能的MCU。首先從系統設計角度看,隨著市場變化速度的加快和用戶要求的提高,一個設計靈活的軟硬平臺是必須的,而分離的模擬器件和固定功能的MCU遠遠不能滿足不斷更新的設計要求和有限的研發上市時間。其次,處理傳感器的噪聲需要一個復雜的混合信號解決方案,通常需要放大器、濾波器、ADC、比較器和DAC。對于傳統設計,便需要考慮非常多的獨立的分離器件,這無論從產品成本還是生產成本來看都會成為負擔。
而高集成度且設計靈活的PSoC便有效地應對了這些挑戰。PSoC可以實現哪些功能呢?單芯片的PSoC在信號的輸入端可以實現各種模擬感應信號的輸入和信號處理,同時還可以實現時下流行的電容式觸摸感應的設計。在控制功能方面,PSoC可以實現各種風扇和電機的控制、功率控制,同時還支持多種復雜的通訊接口。PSoC的應用無處不在,消費電子、白電、醫療、汽車、工控產品中都有PSoC的用武之地,目前PSoC的全球的客戶已超過8100個,出貨量超過4億。
PSoC是什么樣的片上系統呢?PSoC是可編程片上系統的字母縮寫,它不是一個單純的MCU,除了8位MCU核、Flash和SRAM以外,還包含了可編程的數字模塊和模擬模塊,是一個真正的片上系統。
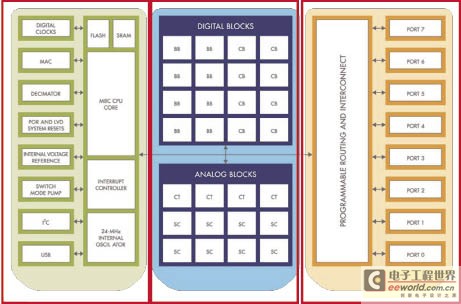
圖1 PSoC產品框圖

圖2 超聲波信號發送
從圖1中可以看到,PSoC的整個系統是由MCU核、Memory、數字系統、模擬系統和其他系統資源組成。圖中左邊的部分是普通單片機的結構,包含時鐘源、Flash、SRAM和MCU本身。右邊是一些可編程的GPIO。中間部分就是PSoC特色,即可編程數字模塊和模擬模塊,PSoC的優勢也正在這里。這些可編程的數字模塊和模擬模塊可以配制成不同的功能,例如UART、ADC、濾波器和PWM等等。此外,這些模塊還可以重新配制來實現不同的功能,并且在任何時間都可以進行修改設計。PSoC支持動態配制的特性,相同的資源在不同的時間可以被配置成不同的用戶模塊,這樣可以大大節省資源。數字模塊和模擬模塊可以和外部引腳互聯,也是可編程的。因此通過PSoC,工程師可以基本完成一個系統的設計。
PSoC的模擬功能非常強大,可以實現各種不同的模擬器件,如ADC、DAC、濾波等等, CapSense也是用模擬功能實現的。傳感器各種的應用、控制應用等等都是由這些模擬模塊的功能來實現的。
PSoC不同于固定功能的MCU,它集成度高、使用靈活、實時可編程,這些優點幫助設計者減少成本,使產品快速進入市場,并且增加市場份額。其中,集成度高是因為PSoC是一個系統級的解決方案,內含可編程的數字和模擬模塊、8位控制器,以及Flash和SRAM等;使用靈活是指可以使用集可視化嵌入式設計工具為一體PSoC Designer進行設計,設計靈活、節省時間,并且即使在最后一刻也可以修改設計;實時可編程性是指PSoC提供了一系列模擬和數字用戶模塊 (例如放大器、濾波器、比較器、定時器、計數器等等),用戶可以根據需要進行配置,或者動態配置。總之,PSoC作為靈活的片上系統,有助于增加產品的價值。
超聲波傳感器和倒車雷達系統
超聲波傳感器有多種應用,常見的用途包括:流量計、工具零件的清洗、倒車雷達等。超聲傳感器將處于超聲頻率的電信號經過超聲波傳感器中的超聲波換能器轉換成超聲聲波,超聲波傳感器按照一定的方向發射該超聲聲波,當超聲聲波遇到障礙物以后被反彈回來,再被超聲波傳感器所接受,由超聲波換能傳感器轉換為電信號。由于音速是一個已知的常數,因此通過回彈的時間,就可以計算出距離。
超聲波傳感器從封裝的類型上可以分為兩種,分別是開放型和密封型。其中,開放型的傳播面積更廣,探測距離更遠,適合在開放環境中應用。密封型傳感器傳播面積較小,探測距離一般,適合在液體中應用,并需緊貼固體材料。
超聲波傳感器的使用類似于雷達,它主要完成兩項任務:發送超聲聲波和接收超聲聲波。發送超聲波相對簡單,只要對超聲波傳感器發送的超聲波進行脈沖寬度調制,同時開啟計時器。而接收部分較為復雜,需要對信號進行調配,以便控制器能正確低識別反射回的超聲波、確定接收時間并停止計時器技術,然后根據“距離 = 時間×音速”計算距離。通過圖2,可以看到信號是如何被發送出去的。由控制芯片產生的PWM信號通過功率放大器放大,送到超聲波傳感器進行脈沖寬度調制,然后開啟計時器。超聲信號接收和處理的過程相對要復雜一些(圖3)。從超聲傳感器輸入的信號經PGA放大,在利用帶通濾波器濾除噪聲以后,將信號與直流偏置進行對比,通過輸出調制信號,然后再將其將發送至低通濾波器,生成調制信號的包絡線。該包絡線再通過比較器或者AD轉換器來判斷它是否是真正的反彈信號,同時停止計時器,最后通過計數器的值和音速計算出距離。
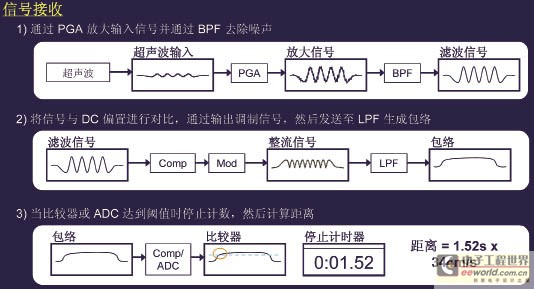
圖3 超聲波信號接收
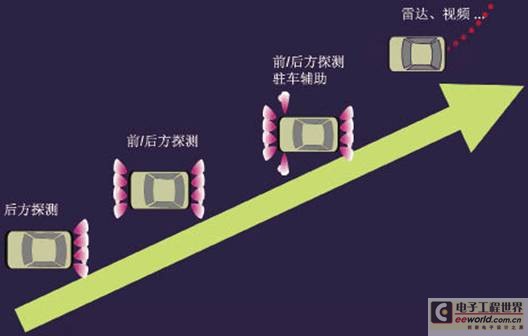
圖4 倒車雷達的發展趨勢
圖4顯示出倒車雷達發展的趨勢,從圖中可以看到,最初的倒車雷達,只有后方探測,現在的倒車雷達不僅實現了前后方探測,甚至連左右側都可以進行探測。還有一些更先進的技術,已經使用在高檔汽車上。
低端倒車雷達系統
倒車雷達系統一般由兩部分組成,分別是探頭部分和主控部分。探頭部分一般安裝在汽車的尾部或兩側,而主控部分則位于汽車的前端,靠近汽車駕駛員。低端倒車雷達(圖5)的探頭部分,通常只包含超聲波傳感器,而主控部分包括CPU和所有的外圍電路。探頭和主控板通過傳導線連接,傳送發送和回波信號,一個主控板帶3到4個探頭。低端的倒車雷達系統成本通常較低,多采用分立元件,集成度也較低,因而性能較差,有效測量距離小于1.5m。此外,報警也采用簡單的蜂鳴器。
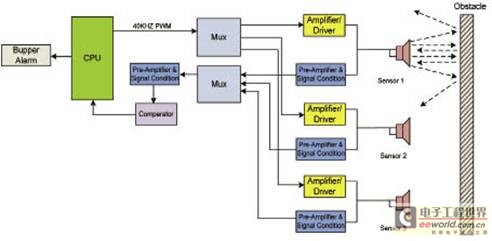
圖5 低端倒車雷達系統框圖
中端倒車雷達系統
中端的倒車雷達系統在探頭上除了安裝超聲傳感器以外,還包括發射信號的放大和驅動電路,以及接收信號的放大和信號調理電路,這樣可以減小信號在長線傳輸中引入的噪聲的影響。另外,在控制板上,使用了兩級放大和帶通濾波器以提高測量的性能。而測量的距離,通常通過數字顯示的方式來顯示,并且伴有聲音的報警和提示。
高端倒車雷達系統
圖7是一個高端的倒車雷達系統的系統框圖。可以看到,本來處于主控端的一些功能模塊都被轉移到探頭一端,它的特點是在探頭上帶有信號放大電路以及處理器,測量信號在傳感器上實現處理,因此沒有長線傳輸存在的信號干擾問題。另外,它可對每個傳感器進行單獨校準,通過LIN或其他串行方式與主CPU進行通訊。因為通常探頭部分的體積都比較小,為了在探頭上實現信號的放大和處理,就需要較高集成度的器件以方便傳感器和PCB板的集成。
圖8給出了倒車雷達傳感器覆蓋區域的要求,它要求在水平方向上70±5cm范圍內最小100°;在100±5cm范圍內,最小40°。垂直方向上,在50±5cm范圍內最小60°;在110±5cm范圍內,最小20°。
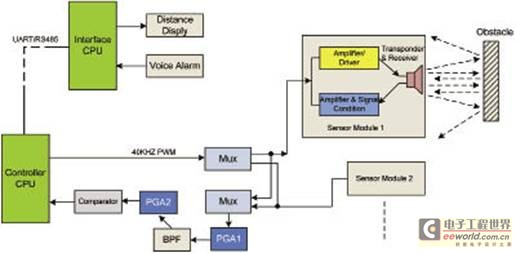
圖6 中端倒車雷達系統框圖
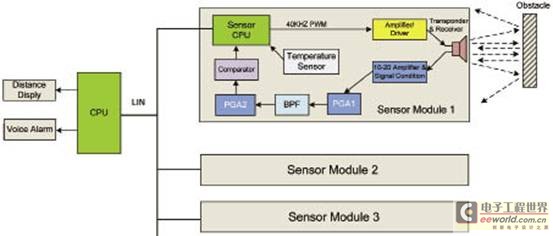
圖7 高端倒車雷達系統框圖
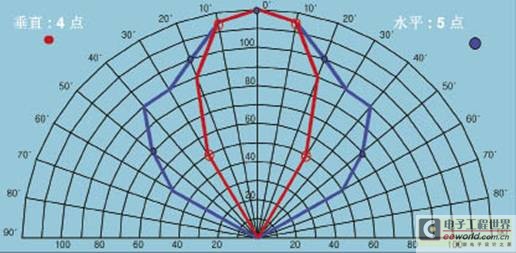
圖8 倒車雷達傳感器覆蓋區域要求
Cypress倒車雷達控制系統參考設計
Cypress的倒車雷達控制系統使用PSoC系統的主要原因是:1、它的資源靈活,PSoC的模塊資源具有可編程性,針對不同客戶、不同定位的產品需求可重新配置;2、集成度高,集成了PWM w/DB、比較器、A/D轉換器PGA等模擬模塊,模擬集成度高;3、它幾乎不需要外部器件,降低了 BOM 成本, 減小了電路板尺寸;4、它的IP保護能力強,很難被復制。
PSoC倒車雷達控制器采用CY8C24633芯片作為主控芯片。芯片采用M8C處理器,運行速度高達24M,內含8×8的乘法器和32位的累加器。工作電壓范圍為3V~5.25V,溫度范圍為工業級:-40℃~85℃。該PSoC芯片包括4個數字模塊和4個模擬模塊(2CT/2SC)。另外它還擁有針對電機控制而優化的高速8 位 SAR AD轉換器。
圖9為Cypress倒車雷達系統的硬件框圖,采用CY8C24633用于主控板。該設計使用收發一體的傳感器,并在傳感器端增加初級放大電路。驅動信號為40kHz的脈沖信號。每個傳感器采用3線連接方式與主控板連接,最多可接6路傳感器輸入。對交流信號進行電平抬升,從而更好地處理回波信號。內部的模擬模塊可配置成PGA、比較器及帶通濾波器,并在器件內部實現互連。主控板與顯示器通過串口連接,顯示器通過數字方式顯示探測距離。
圖10給出了PSoC內部模塊的配置和信號的路由,從圖中可以看到,4個數字模塊分別被配置成PWM計時器、定時器和串口發生器。而四個模擬模塊分別被配置成兩個PGA放大器和一個帶通濾波器,信號的路由從圖中也可以看得非常清楚,
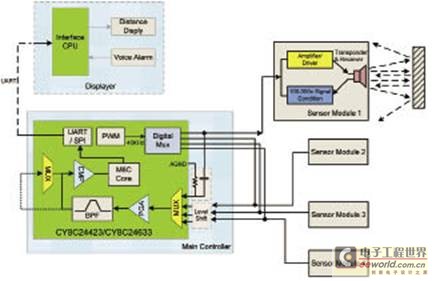
圖9 Cypress倒車雷達控制系統硬件框圖
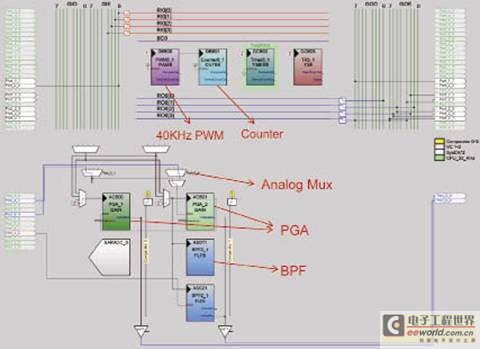
圖10 PSoC內部模塊配置









 工商網監
工商網監
用戶評論
共 條評論