

















1 引言
隨著汽車普及率的逐年增加,消費(fèi)者在將汽車作為交通運(yùn)輸工具的同時(shí),對(duì)汽車配置有了更多的要求,尤其是對(duì)舒適性和安全性提出了更高的要求。對(duì)于很多司機(jī)尤其是新手來(lái)說(shuō),倒車無(wú)疑是件非常頭痛的事,倒車?yán)走_(dá)正好可以幫司機(jī)解決這個(gè)難題,因此越來(lái)越多的商家進(jìn)入了這個(gè)市場(chǎng)。從目前市場(chǎng)情況看,國(guó)內(nèi)倒車雷達(dá)生產(chǎn)廠家都是使用單片機(jī)配合外圍運(yùn)放、鎖相環(huán)電路完成超聲波測(cè)距并提供報(bào)警的工作,缺乏單芯片方案,而使用單片機(jī)方案要求生產(chǎn)廠家必須具備開(kāi)發(fā)軟硬件的能力,而且利用軟件控制存在不穩(wěn)定的因素。如果能用專用芯片實(shí)現(xiàn)整個(gè)系統(tǒng)功能,對(duì)倒車?yán)走_(dá)生產(chǎn)商來(lái)說(shuō),不僅能降低開(kāi)發(fā)和生產(chǎn)成本,對(duì)整機(jī)的可靠性也有很大提高。
2 系統(tǒng)概述
2.1 系統(tǒng)框圖
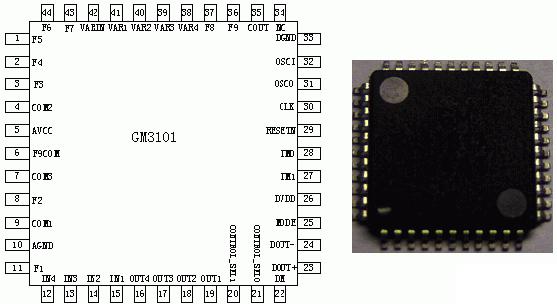
圖1 芯片管腳圖示
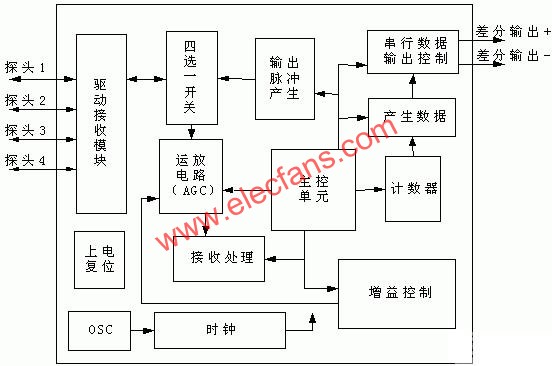
圖2 系統(tǒng)內(nèi)部結(jié)構(gòu)框圖
2.2 功能概述
系統(tǒng)提供4個(gè)超聲波探頭接口,接收到反射回來(lái)的信號(hào)后,根據(jù)發(fā)送和接收的時(shí)間差判斷障礙物距離的危險(xiǎn)等級(jí),輸出相應(yīng)報(bào)警信號(hào)。報(bào)警信號(hào)編碼后采用雙線差分方式輸出,輸出信號(hào)的內(nèi)容包括:各探頭檢測(cè)到的障礙物距離的危險(xiǎn)等級(jí)、最近障礙物的方位、最近障礙物的距離值和附加消息。
2.3 接口協(xié)議
報(bào)警信號(hào)采用雙線差分串行輸出的方式,目的是提高傳輸信號(hào)在長(zhǎng)距離和強(qiáng)干擾環(huán)境下的傳輸正確性。雙線差分傳輸具體格式是:ALOUTP輸出實(shí)際需要的信號(hào),ALOUTN 則輸出與ALOUTP相反的電平信號(hào)。
2.3.1 倒車模式
報(bào)警信號(hào)以數(shù)據(jù)包格式輸出,每個(gè)數(shù)據(jù)包包括3個(gè)字節(jié),格式和內(nèi)容如下所述:
第一個(gè)字節(jié):第一字節(jié)高四位為起始標(biāo)志,用于說(shuō)明此報(bào)警數(shù)據(jù)是倒車模式下的數(shù)據(jù)還是扒車模式下的數(shù)據(jù),倒車模式是“0101”,扒車模式是“1010”。倒車模式下數(shù)據(jù)格式如圖3所示,第一字節(jié)的低2兩位用于輸出附加消息,輸出數(shù)據(jù)指示1或4探頭是否進(jìn)入環(huán)境適應(yīng)模式,S1表示探頭1是否進(jìn)入環(huán)境適應(yīng)模式,“1”表示進(jìn)入環(huán)境適應(yīng)模式,“0”表示正常倒車模式;S4表示探頭2是否進(jìn)入環(huán)境適應(yīng)模式,“1”表示進(jìn)入環(huán)境適應(yīng)模式,“0”表示正常倒車模式。低4位SX1和低3位SX0表示最近障礙物的方位,00表示是探頭1方向,01表示是探頭2方向,10表示是探頭3方向,11表示是探頭4方向。
擊圖片可在新窗口打開(kāi)")
圖3 第一字節(jié)數(shù)據(jù)格式
第二個(gè)字節(jié):如圖4所示,SXA和SXB表示X號(hào)探頭檢測(cè)到的障礙物的危險(xiǎn)等級(jí),危險(xiǎn)等級(jí)分為安全、警告、危險(xiǎn)、停車4級(jí),分別用00、01、10、11表示。例如第二字節(jié)數(shù)據(jù)為“10010000”,表示第一個(gè)探頭檢測(cè)到危險(xiǎn)狀態(tài),第二個(gè)探頭檢測(cè)到警告狀態(tài),第三和第四個(gè)探頭為安全狀態(tài)。
擊圖片可在新窗口打開(kāi)")
圖4 第二字節(jié)數(shù)據(jù)格式
第三字節(jié):第三字節(jié)輸出最近障礙物的距離值,數(shù)據(jù)格式如圖5所示,DA1DA0表示最近障礙物距離的第一位數(shù)據(jù),按BCD編碼,最大值為3;DB0~DB3表示最近障礙物距離的第二位數(shù)據(jù),按BCD編碼,最大值為9;DC0表示第三位數(shù)據(jù),0表示0,1表示5。
擊圖片可在新窗口打開(kāi)")
圖5 第三字節(jié)數(shù)據(jù)格式
[page_break]
2.3.2 防扒車模式
防扒車模式下,輸出的數(shù)據(jù)包也包括3個(gè)字節(jié),但只有第一個(gè)字節(jié)為有效數(shù)據(jù),后兩個(gè)字節(jié)無(wú)效,固定為‘0x00’。該數(shù)據(jù)包第一字節(jié)的數(shù)據(jù)格式如圖6所示,高四位為起始標(biāo)志,用于說(shuō)明此報(bào)警數(shù)據(jù)是倒車模式下的數(shù)據(jù)還是防扒車模式下的數(shù)據(jù),倒車模式是“0101”,扒車模式是“1010”。低四位指示方位,SX位為1則表示X號(hào)探頭檢測(cè)到近距離障礙物,SX為0則表示沒(méi)有檢測(cè)到近距離障礙物。
擊圖片可在新窗口打開(kāi)")
圖6 防扒車模式報(bào)警數(shù)據(jù)格式
3 智能化原理
3.1 防聲波衍射處理
由于聲波傳輸?shù)奶匦裕暡〞?huì)出現(xiàn)未經(jīng)實(shí)際物體反射就直接回到探頭被檢測(cè)到,造成處理器認(rèn)為是實(shí)際發(fā)射接收到的信號(hào),直接導(dǎo)致誤報(bào)。但聲波衍射的干擾強(qiáng)度很難達(dá)到實(shí)際物體有效反射的超聲波強(qiáng)度,所以可通過(guò)識(shí)別來(lái)判斷。硬件一旦判定收到的超聲波信號(hào)是聲波衍射返回的信號(hào),則自動(dòng)忽略該結(jié)果,芯片繼續(xù)等待在固定時(shí)間△T內(nèi)是否有有效反射波,有則進(jìn)行處理,沒(méi)有則轉(zhuǎn)入下一探頭的驅(qū)動(dòng)。
3.2 智能識(shí)別處理
由于地面上的小物體,比如磚塊,石塊,水果都會(huì)造成超聲波的反射,并讓探頭檢測(cè)到。而這些物體并不影響車輛的倒車操作,所以實(shí)際上是一種誤報(bào)現(xiàn)象。所以硬件要對(duì)這種情況進(jìn)行處理,提高報(bào)警的準(zhǔn)確性。
智能識(shí)別處理可以通過(guò)不同大小的物體反射的超聲波幅度不同來(lái)判斷。所以一旦確定多大的物體不會(huì)影響倒車的操作,就可以明確地測(cè)量該物體在不同距離上的超聲波發(fā)生的幅度和轉(zhuǎn)換后的電平大小,處理器可根據(jù)實(shí)驗(yàn)測(cè)試出來(lái)的結(jié)果在模擬或數(shù)字部分進(jìn)行處理,根據(jù)要求忽略掉相應(yīng)的接收信號(hào)。與防聲波衍射處理一樣,硬件忽略掉無(wú)效反射波后要繼續(xù)等待在固定時(shí)間△T內(nèi)是否有有效反射波,有則進(jìn)行處理,沒(méi)有則轉(zhuǎn)入下一探頭的驅(qū)動(dòng)。
3.3 環(huán)境適應(yīng)處理
車輛在倒車進(jìn)入一個(gè)巷道或兩邊已經(jīng)停靠了其它車輛的停車場(chǎng)的車位時(shí)都會(huì)存在環(huán)境影響造成的誤報(bào)警。因?yàn)樵谶@種情況下,絕大部分倒車的過(guò)程中,最近的檢測(cè)距離和方位都在車身的兩邊(墻面或兩邊車輛的超聲波反射),但駕駛員可以通過(guò)兩邊的反光鏡掌握兩邊的車距,駕駛員關(guān)心的是車身后面的障礙物體。所以處理器在這種環(huán)境下應(yīng)該能識(shí)別并適應(yīng)。
解決辦法是對(duì)車身兩邊的物體發(fā)射的距離做記錄和統(tǒng)計(jì),當(dāng)發(fā)現(xiàn)探頭一和探頭四,或者其中的一個(gè)在6個(gè)報(bào)警周期內(nèi)檢測(cè)到的距離都比較恒定,或變化范圍很小,則認(rèn)為處于上述環(huán)境中。于是,處理器在送出相應(yīng)的消息后就不再輸出相應(yīng)探頭的探測(cè)信息,只對(duì)探頭二和探頭三的檢測(cè)信息作出響應(yīng)。但是如果探頭一和探頭四的檢測(cè)距離變化范圍超過(guò)設(shè)定值(±△L米),則馬上回到正常檢測(cè)的狀態(tài)機(jī)模式,兩側(cè)或某一邊的距離再次恒定后又轉(zhuǎn)到環(huán)境適應(yīng)模式下。同時(shí),環(huán)境適應(yīng)模式也有一個(gè)極限設(shè)定值(0.5米),即恒定距離小于0.5米時(shí),處理器還是回到正常檢測(cè)模式,對(duì)該探頭的檢測(cè)信息輸出報(bào)警信息。
3.4 防地面固定聲波反射處理
由于各種車輛的底盤和后保險(xiǎn)杠的高度及斜度不一樣,再加上各倒車?yán)走_(dá)廠家所采用的探頭種類不一樣,比如單角度的探頭發(fā)射范圍廣,所以很可能存在超聲波發(fā)射到地面后的固定反射情況,處理器必須適應(yīng)并識(shí)別出是一個(gè)固定距離的干擾。
處理方法是:每次開(kāi)機(jī)運(yùn)行后,檢測(cè)到四個(gè)探頭在6個(gè)報(bào)警周期內(nèi)收到的障礙物距離值都是一致且恒定的(誤差允許在±△L米內(nèi)),則將此距離當(dāng)成是地面反射干擾,以后不再響應(yīng)處理,而是在設(shè)定的周期時(shí)間內(nèi)等待其它有效的超聲波發(fā)射信號(hào)。
4 硬件實(shí)現(xiàn)
4.1 代碼實(shí)現(xiàn)
//+FHDR===============================================================
// Copyright 2005,UESTC,All rights reserved.
// File Name : alarm_deal.v
// Author :Yangbing
// Release History
// Version Date Author Description
// 1.0 20/05/2005 initial version
//-FHDR==============================================================
`timescale 1ns/10ps
module alarm_deal (clk,resetn,mode,dm,pulse_out,pulse_back,ch_sel,mux_enable,
alarm_out,alarm_outn);
//====================================================================
// input ports declaration
//====================================================================
……………………………………………………………………………………………………
…………………………………………………………………………………………………..
//======================end module ====================================
endmodule
//================= alarm_deal verilog file end =============================
4.2 電路結(jié)構(gòu)
本系統(tǒng)采用0.5u mix signal 工藝,在成都國(guó)騰微電子有限公司的工作平臺(tái)的支持下,已經(jīng)成功完成綜合驗(yàn)證,版圖設(shè)計(jì)工作。綜合電路結(jié)構(gòu)如圖7:
擊圖片可在新窗口打開(kāi)")
圖7 電路結(jié)構(gòu)
擊圖片可在新窗口打開(kāi)")
圖8 版圖結(jié)構(gòu)
4.3 版圖設(shè)計(jì)
該版圖設(shè)計(jì)采用0.5u mix signal 工藝,版圖結(jié)構(gòu)如圖8所示。
5 應(yīng)用系統(tǒng)設(shè)計(jì)
擊圖片可在新窗口打開(kāi)")
圖9 典型應(yīng)用
此典型應(yīng)用系統(tǒng)(圖9)的核心:就是以倒車?yán)走_(dá)主控芯片GM3101為核心的數(shù)據(jù)處理部分和以單片機(jī)為核心的數(shù)據(jù)顯示部分組成。經(jīng)測(cè)試完全達(dá)到了市場(chǎng)上高端產(chǎn)品的要求,甚至在顯示距離,顯示靈敏度,系統(tǒng)工作穩(wěn)定性等方面都有所提高。相比較市場(chǎng)上其他倒車?yán)走_(dá)系統(tǒng)主要有以下優(yōu)點(diǎn):
(1)抗干擾性和可靠性
傳統(tǒng)的倒車?yán)走_(dá)使用的是基于RAM和ROM結(jié)構(gòu)的單片機(jī),所以在抗電磁干擾性和穩(wěn)定上無(wú)法和純硬件的ASIC芯片相比較,GM系列倒車?yán)走_(dá)專用芯片工作可靠穩(wěn)定,不會(huì)出現(xiàn)死機(jī)現(xiàn)象。
(2)設(shè)計(jì)簡(jiǎn)單,生產(chǎn)簡(jiǎn)便
傳統(tǒng)的倒車?yán)走_(dá)設(shè)計(jì)復(fù)雜,器件繁多,出現(xiàn)故障的可能性也更大,且需要編程,生產(chǎn)調(diào)試麻煩,分離元件性能差異大,整體指標(biāo)不容易統(tǒng)一。而GM系列倒車?yán)走_(dá)產(chǎn)品設(shè)計(jì)應(yīng)用非常簡(jiǎn)單,只需要外接探頭和少量的電阻電容即可工作,減少了開(kāi)發(fā)量,同時(shí)顯著減少主機(jī)的面積和尺寸,可做到傳統(tǒng)倒車?yán)走_(dá)大小的1/3。
(3)汽車級(jí)的工作指標(biāo)
GM系列倒車?yán)走_(dá)產(chǎn)品是全汽車級(jí)工作環(huán)境指標(biāo)設(shè)計(jì),遠(yuǎn)遠(yuǎn)高于民用等級(jí)的單片機(jī),完全滿足和適應(yīng)汽車內(nèi)的工作條件。
(4)數(shù)據(jù)通訊的可靠性
GM3101與其配套的顯示部分之間采用差分通訊方式,具有極強(qiáng)的抗干擾性和可靠性,是單片機(jī)無(wú)法實(shí)現(xiàn)的。
(5)防止聲波衍射干擾
傳統(tǒng)的倒車?yán)走_(dá)由于單片機(jī)的處理能力,很難處理聲波衍射對(duì)檢測(cè)的干擾,GM系列倒車?yán)走_(dá)產(chǎn)品能完全的濾除聲波衍射的干擾,讓檢測(cè)更可靠更準(zhǔn)確。
(6)智能識(shí)別功能
由于任何物體都會(huì)對(duì)聲波進(jìn)行反射,所以倒車?yán)走_(dá)能檢測(cè)到物體的距離。而在實(shí)際倒車應(yīng)用中,很多過(guò)小的物體,如水果、壘球等都會(huì)讓倒車?yán)走_(dá)認(rèn)為是障礙物而報(bào)警,但是這些過(guò)小的物體并不影響車輛的正常倒車,所以GM3101芯片能智能的識(shí)別物體的物質(zhì)屬性和大小,然后再進(jìn)行報(bào)警處理,避免了上述非必要的報(bào)警。
(7)防止固定地面反射干擾
各種車輛的尾部保險(xiǎn)杠的高度和尾部垂直面的傾斜度都不一致,有時(shí)會(huì)出現(xiàn)探頭的安裝角度過(guò)低,聲波在不平整的地面形成反射,讓倒車?yán)走_(dá)誤認(rèn)為是有效障礙物而報(bào)警。而GM3101芯片能自動(dòng)的適應(yīng)地面造成的反射干擾而避免了誤報(bào)警。
(8) 環(huán)境智能適應(yīng)
車輛在進(jìn)入巷道或兩邊已經(jīng)停放有車輛的車位倒車時(shí),由于車輛的兩邊距離在比較長(zhǎng)的時(shí)間內(nèi)都小于車后的距離,所以普通的倒車?yán)走_(dá)只能響應(yīng)最近距離的檢測(cè),而讓駕駛者無(wú)法了解車后的真實(shí)情況。GM3101能智能的判斷停車區(qū)域的情況,讓倒車?yán)走_(dá)集中重點(diǎn)的處理駕駛者更關(guān)心的車后情況,而且又不會(huì)忽略兩邊的檢測(cè)。
6 總結(jié)
通過(guò)電子倒車?yán)走_(dá)系統(tǒng)的詳細(xì)分析和設(shè)計(jì),成功實(shí)現(xiàn)了聲波衍射的干擾,環(huán)境自適應(yīng),智能化識(shí)別處理,以及對(duì)應(yīng)于不同應(yīng)用情況的報(bào)警輸出選擇。該系統(tǒng)能有效地防止軟件控制存在不穩(wěn)定的因素,不僅能降低倒車?yán)走_(dá)生產(chǎn)的開(kāi)發(fā)和生產(chǎn)成本,對(duì)整機(jī)的可靠性也有了很大提高。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
用戶評(píng)論
共 條評(píng)論