 電子發燒友App
電子發燒友App


最近又有從事哪些職業的人員將被機器所取代呢?其中一個備選答案是汽車司機——世界上最普遍的職業之一。傳統車企正在面臨一場主要由科技公司主導的以自動駕駛技術為核心的產業革命,而與之相關的各類媒體報道使得許多消費者產生了他們的下一輛汽車將是完全自動駕駛的預期。
但是,仔細審視一下實現高級別自動駕駛(SAE Level 4及以上)所需的技術,就會了解到,真正實現并推廣該類汽車需要花上比預期更長的時間,或許是5年,或許是10年。
厘清此次技術革命的脈絡
對實現自動駕駛汽車的首次嘗試主要集中在高級駕駛員輔助系統(Advanced Driver Assistant Systems,ADAS)領域,屬于此類的功能包括緊急制動(Emergency Braking),倒車攝像頭(Backup Camera),自適應巡航控制(Adaptive Cruise Control)以及自動泊車系統(Self-Parking System)等,這些技術一開始最先應用在豪華車上。最終,產業的監管機構開始要求在每輛汽車中都配置部分ADAS功能,這加速了其對大眾市場的滲透。截至到2016年,ADAS技術已經形成了一個規模約為150億美元的市場。
在全球范圍內,ADAS系統(例如,夜視功能及車輛盲點探測)的出國量從2014年的9000萬套增加到了2016年的約1.4億套,僅兩年時間規模就增長了50%。其中,部分ADAS功能相比于其他功能更有吸引力,例如,從2014年到2016年,具有環視視角的停車系統(Surround-View Parking Systems)的普及率增長超過了150%,而自適應前置照明系統(Adaptive Front-Lighting Systems)的數量在同一時間段內增加了約20%,如圖1所示。
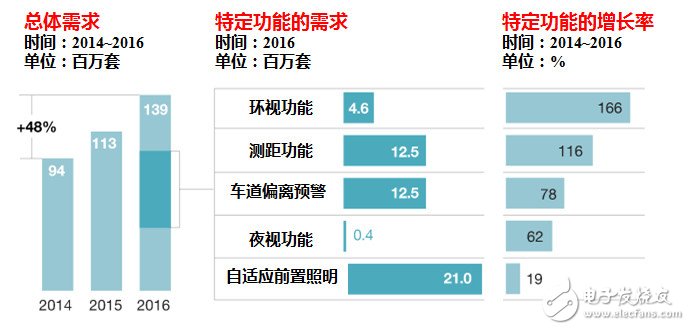
圖1 ADAS系統的部分市場數據
客戶的支付意愿和產品價格的下降都幫助了ADAS系統套件的普及。麥肯錫公司最近的一項調查發現,為了給汽車配置相應的ADAS功能,駕駛員將平均多花費500 ~ 2500美元。盡管起初ADAS功能只在豪華車上配置,但目前許多汽車制造商可以在售價20000美元級別的汽車上配置相同的ADAS功能。許多高端汽車不僅在高速公路條件下能自動轉彎(即橫向控制)、加速及制動(即縱向控制),而且還能采取相應的行動避免車輛發生碰撞。一些在有限距離的固定線路上行駛的商用乘用車(如短駁車)甚至可以將自己停入空間極為緊湊的停車位。
但是,雖然ADAS已經取得長足的進展,但整個行業還沒有確定半自動駕駛汽車(如SAE Level 3車輛)的最佳技術原型,因此目前仍處于測試-改進模式(test-and-refine mode)。截至到目前為止,共出現了3種技術路線:
以攝像頭(Camera Systems)為主,毫米波雷達為輔;
以毫米波雷達(Radar)為主,攝像頭為輔;
混合路線,即把激光雷達、毫米波雷達、攝像頭等硬件以及傳感器融合算法相結合,以實現對環境更細致的理解。
實現上述技術路線的成本各不相同,其中“混合路線”最為昂貴。截至到目前為止,上述3種技術路線之間尚未決出勝負,每個系統都有其優缺點,例如,“以毫米波雷達為主”的方法可以在高速公路場景下運行良好,該場景中的交通流量相對而言較易預測且對環境進行測繪的精度要求并不高。另一方面,“混合路線”的方法在人口稠密的城市地區能夠更好地工作,在該場景下,精確的測繪可以幫助汽車能沿狹窄的街道行駛,識別出體積較小的但影響行駛安全的物體。
解決自動駕駛汽車技術中的難題
自動駕駛汽車無疑將開啟了交通運輸行業的新時代,但整個行業尚需解決一些技術難題,方可真正實現能夠商業化的自動駕駛技術。我們已經看到,ADAS功能可以減輕駕駛負擔,并使駕駛的過程變得更安全。但在某些情況下,該技術也會引發新的問題,例如,人類過分信任或依賴這些新系統。這并不是一個新現象,當安全氣囊成在20世紀90年代為汽車的標配時,一些駕駛員和乘客將此作為自己可以不佩戴安全帶的理由,顯然這種錯誤的觀念將導致額外傷亡事件的發生。
與之相類似,ADAS功能的標配化會使駕駛員在工況超出ADAS處理能力的情況仍然盲目依靠它。例如,自適應巡航控制技術在汽車直接跟隨另一輛行駛中的汽車時能夠運行良好,但它通常不能發現靜止的物體。不幸的是,現實生活中的情況以及受控實驗都表明,對自動化過于信任的駕駛員最終會以撞上靜止的汽車或其他物體而告終。ADAS目前可實現的功能有限,而這正是許多早期用戶所沒有真正領會理解到的。
此外,還有一些因素會導致安全難題。2015年,在美國,駕駛傳統汽車(即SAE Level 0)的司機因開車時分心而引發的交通事故造成了近3500人死亡,39萬余人受傷。不幸的是,據專家預計,在引入具有某種級別自動駕駛功能但仍要求人類駕駛員隨時接管車輛控制權以防止事故發生(注:即該自動駕駛系統仍然無法完全取代人類駕駛員,應該指SAE Level 3及以下的自動駕駛水平)的汽車之后,一開始車禍發生的數量并不會顯著下降。
安全專家擔心,半自動駕駛汽車的駕駛員可能會在自動駕駛模式下進行閱讀或發短信等活動,從而在被要求接管汽車控制權的瞬間會缺乏對環境必要的感知。隨著駕駛員又再次操控汽車,他們必須立即評估周圍環境、確定車輛在其中的位置、分析其所面臨的危險狀況并選定一個安全的行動方案。而當車速達到65英里/小時(約合104公里/小時)時,汽車只需不到4秒的時間便可駛過相當于標準足球場長度的距離,且駕駛員將控制權交給汽車的時間越長,再次進入駕車狀態的過程也會越長。因此,汽車制造商必須開發更好的人機界面,以確保新技術將挽救更多的生命而不是引發更多的事故。
我們在其他場合也遇到過類似的問題:2009年,因為飛行員在客機處于自動駕駛模式下飛行時沒有及時接管控制權,致使該航班飛機駛過了其目的地機場約150英里才被發現。對于半自動駕駛汽車而言,“空域”(對應于汽車行駛的“地面”)將變得更加擁擠,“飛行員”(對應于操控汽車的“駕駛員”)的訓練狀況也較差。因此,對于全神貫注于做其它事情的駕駛員而言,汽車在自動駕駛模式下運行時間過長會變得更加危險。
向全自動駕駛演進
在接下來的5年中,可能會出現屬于SAE Level 4級別的自動駕駛汽車,該類汽車能夠在特定場景下完成所有原本需要人類駕駛員完成的駕駛任務,期間并不需要人類駕駛員的干預。雖然此技術已經能夠在有限場景下以將來正常工作的狀態進行測試,但真正驗證該系統的性能可能仍然需要花費數年時間,因為系統必須進行大量測試以求得能夠暴露于罕見場景(注:即機器學習中所謂的“Edge Cases”)中的機會,并采取應對措施將其剔除。此外,工程師還需要實現與保證系統可靠性及安全性方面的目標。起初的時候,公司通常會將系統設計成能夠在特定地理區域內的特定應用場景中可靠運行,即所謂的設定“地理柵欄”(Geofence)。另外一個先決條件是,在調整系統以確保能在特定場景中成功運行之后,當“地理柵欄”擴展到涵蓋更廣泛的應用場景和更大面積的地理區域時,亦需進行相應的額外調整。
實現SAE Level 4及SAE Level 5的難點在于需要在任何環境下且在沒有任何限制的條件下安全地操控汽車,例如,需要在沒有繪制過地圖的地區或者沒有車道線及重要基礎設施和環境特征的道路上行駛。因此,由于工程師必須要覆蓋和測試的應用場景(Use Cases)數量呈指數級增長,建立一個可在(大部分)無限制環境中運行的系統將需要花費更多的精力。例如,在沒有車道標記或車輛行駛在未鋪設石板/柏油的道路上,系統必須能夠判斷出哪些區域是可行駛區域。這是一個困難的計算機視覺技術問題,特別是如果路面與周圍環境沒有顯著差異時,例如道路被大雪所覆蓋時間。
實現全自動駕駛可能需要花費10年以上的時間
鑒于目前的發展趨勢,未來10年內完全自動駕駛汽車(SAE Level 4及以上級別)將難以真正實現,其中主要的障礙在于開發滿足SAE Level 4及以上級別要求的軟件。雖然硬件方面的技術創新能夠提供所需的計算能力,而且價格(特別是傳感器)會下降(注:由于反摩爾定律的作用),但軟件仍將是關鍵的技術瓶頸。
事實上,硬件的性能已經接近達到使高度優化后的自動駕駛汽車軟件(Well-Optimized AV Software)順暢運行所需的水平,目前的技術應該能夠很快達到自動駕駛汽車所需的計算能力,不論是圖形處理器(Graphics Processing Units,GPU)還是中央處理器。
目前攝像頭已經能夠滿足測試距離、分辨率和視場等方面的性能要求,但在惡劣天氣條件下也面臨顯著的局限性。毫米波雷達在技術上已經準備就緒,它是惡劣天氣及路況條件下進行探測的最佳選項。提供最佳視場的是激光雷達,它可以極高的精度探測車輛周圍360度內的環境狀況。雖然目前市場上出售的激光雷達的價格還非常昂貴,但一些商業上可行的小型廉價產品應該會在未來一兩年內進入市場。幾家高科技公司聲稱可將激光雷達的成本降低到500美元以下,另一家公司已經推出了一種售價約為10000美元的能夠實現完全自動駕駛的系統(大約有十幾個傳感器)。從商業化的角度來看,企業需要了解SAE Level 5汽車所需的最佳的傳感器數量,以控制整車的成本。(注:例如,以色列固態激光雷達創業公司Innoviz在5月23日剛剛推出的固態激光雷達產品InnovizPro的售價將低于7000美元)
令人頭疼的軟件方面的問題仍然存在
開發出與自動駕駛汽車硬件所具備的全部潛力相配且能充分利用之的軟件仍然需要較長時間,鑒于問題的復雜性和目前以科研為導向的屬性,工程開發方面的時間進度表基本已處于停滯狀態。
一個關鍵的問題是,自動駕駛汽車必須在道路上有其他自動駕駛汽車以及人類駕駛員的情形下,學習如何與之協商駕駛方式(注: Chris Urmson在4月份CMU的講座中也指出這是一個令人頭疼的博弈難題)。此外,使用易出錯的GPS傳感器來對車輛進行高精度定位是另一個待解決的復雜問題。解決上述難題不僅需要大量的前期研發,而且還需要經過長時間的測試和驗證。
3種類型的問題更具體地說明了軟件問題。首先是物體分析(Object Analysis),即探測到物體并理解它們所代表的含義,對自動駕駛汽車至關重要。例如,該系統應該以不同的方式處理靜止停放的摩托車和在路邊騎自行車的人。因此,必須在物體分析階段就捕捉到兩者之間關鍵性的差異。
物體分析問題中的初步挑戰是物體探測,考慮到一天中不同的時間段、環境背景和任何可能的運動,這項任務可能會變得很困難。此外,考慮到傳感器所采集的各數據類型(來自激光雷達的點云數據,來自雷達的對象列表以及來自相機圖像數據)之間的差異,確認物體的存在性及其類型所需的傳感器融合算法在技術上實現起來是極具挑戰性的。
第2個問題決策系統(Decision-Making Systems)的設計。為了模仿人類的決策,它們必須歷經大量應用情景并進行密集且全面的“訓練”。理解和標注收集的不同的場景和收集到的圖像對于自動駕駛系統而言是一個運用普通方法所難以解決的問題,創建全面的、能夠覆蓋到自動駕駛汽車所能遇到的所有場景的“if-then”規則庫是行不通的。但是,開發人員可以先構建一個“if-then”的規則數據庫,然后在此基礎上利用機器學習引擎來對其進行補充,因為后者能夠在特定場景中進行智能推理并采取相應行動,而創建一個這樣的引擎是一項非常艱巨的任務,需要完成大量的開發、測試和驗證工作。
最后,該系統還需要一個故障安全機制(Fail-Safe Mechanism),該機制能確保在汽車發生故障時不會讓車上的乘客和周圍的人員陷于險地。目前尚無方法來檢查每一個可能的軟件狀態及其所造成的結果,建立防護措施以防止最壞結果的發生同時控制車輛以使其安全地停車仍是待解決的難題。因此,冗余設計和長時間的測試工作將是必須的。
在實現全自動駕駛的道路上披荊斬棘
隨著各企業推出軟件包(software envelope)來嘗試創建第一批全自動駕駛汽車,它們需要解決與圖2中所列因素相關聯的技術難題。

圖2 自動駕駛汽車系統的組成元件
感知技術、定位技術以及測繪技術
為了完善自動駕駛汽車,參與該領域的企業正在用不同的技術路線來解決自動駕駛汽車在感知、測繪及定位等方面遇到的技術難題。
感知技術(Perception):目標是以最少的測試及驗證里程來達到可靠的感知水平,目前存在兩種技術路線:
毫米波雷達 + 超聲波雷達 + 攝像頭(Radar, Sonar and Cameras):為了感知環境中的車輛和其他物體,自動駕駛汽車將使用毫米波雷達、超聲波雷達及攝像系統,該技術路線并不能在特別高的精度水平上(on a deeply granular level)對環境進行評估,但只需要較少的計算資源;
上述傳感器 + 激光雷達(Lidar Augmentation):第2種技術路線在毫米波雷達和攝像系統的基礎上,還使用了激光雷達。它要求配置更強大的計算能力,但在各種環境中的魯棒性更好,尤其是在擁擠且交通流量很大的環境。
專家們相信第2種技術路線將最終成為許多未來自動駕駛汽車產業參與者們所青睞的方法,這可以從許多汽車制造商、一級供應商及科技公司目前所使用的測試車輛上得到間接驗證,這些汽車大都配置了激光雷達。
測繪技術(Mapping):目前自動駕駛汽車技術開發者們正在使用技術路線有以下兩種:
精細的高清地圖(Granular, High-Definition Maps):為了構建高精地圖,企業經常使用配置有激光雷達和攝像頭的測繪車輛,它們沿著目標路線行進,以創建含有周圍環境360度信息(包括深度信息)的3D高精地圖;
特征測繪(Feature Mapping):這種技術路線不一定需要配置激光雷達,而可以使用相機(通常與雷達相結合)僅繪制某些能夠幫助實現車輛導航的特定的道路特征。例如,捕捉車道線、道路及交通標志、橋梁和其它相對靠近道路的物體。雖然這種技術路線只提供了較低的測繪精度,但處理和更新起來更容易。
捕獲的數據將被(手動地)進行分析以產生語義數據,例如,具有時間限制的車速指示牌。通過使用有人駕駛或自動駕駛且每輛車都配置有連續收集與更新地圖所需的遙感器組件的車隊,地圖制造商可以改進上述兩種技術路線。
定位技術(Localization):通過識別出車輛在其環境中所處的確切位置,定位技術是自動駕駛汽車選定向哪里走并決定怎么走的關鍵先決條件,目前有下列幾類常見的技術路線:
高精地圖(HD Mapping):該方法使用車載傳感器(包括GPS)來將自動駕駛汽車感知到的環境與相應的已有的高精地圖進行比對,提供了車輛可在高精度水平上確定其位置(包括車道信息)及正朝著哪個方向的參照點。
無高精地圖輔助的GPS定位(GPS Localization without HD Maps):此種技術路線依賴于GPS進行近似定位,然后使用自動駕駛汽車的傳感器來監視其環境中的變化以改善其定位信息。例如,此類系統會將GPS的定位數據與車載攝像機捕獲的圖像進行結合,通過逐幀的比對分析(frame-by-frame comparative analysis)來降低GPS信號的誤差范圍。GPS的在水平方向上定位的95%置信區間約為8米,相當于正常路面的寬度。
需要指出的是,上述兩種技術路線還嚴重依賴于慣性導航系統(Inertial Navigation Systems,IHS)和測距數據(Odometry Data)。經驗表明,通常情況下第1種路線的魯棒性更好,能夠實現更精確的定位,而第2種路線在操作上更容易實現,因為并不需要高精地圖。鑒于兩者之間的在精度上差異,設計人員可以在車輛的精確定位信息對于導航并不是必須的場景下(例如,農村和人口較少的道路)使用第2種方法。
決策
全自動駕駛汽車在行駛的每一英里路程中需要做出成千上萬個決定,而且它必須以非常高的準確率長期可靠地運行。目前,自動駕駛汽車的設計者們主要使用以下幾種方法來確保車輛行駛在正確的路線上:
神經網絡(Neural Networks):為了確定具體的場景并做出適當的決策,今天自動駕駛汽車的決策系統主要采用神經網絡,然而,這些網絡的復雜性質可能使得難以理解系統做出某些決定的根本原因或邏輯。
基于規則的決策(Rule-based Decision Making):工程師想出所有可能的“if-then規則”的組合,然后在用基于規則的技術路線對汽車的決策系統進行編程,但此種路線需要花費大量的時間和精力并且可能無法涵蓋到每一個潛在的場景,這些都使得它在實際應用時并不可行。
混合路線(Hybrid Approach):許多專家認為將神經網絡和基于規則的編程方法相結合的技術路線是最佳的解決方案,開發人員可以通過為每一個被中央集權式神經網絡所連接的各獨立進程引入特定的冗余神經網絡來解決神經網絡的固有復雜性(Developers can resolve the inherent complexity of neural networks by introducing redundancy—specific neural networks for individual processes connected by a centralized neural network),此時“if-then規則”可以對其進行優勢互補。
目前,結合統計推理模型的混合路線是最流行的技術路線。
測試與驗證
整個汽車行業在汽車測試與驗證技術方面擁有豐富的經驗,以下是用于開發自動駕駛汽車的典型方法:
蠻力(Brute Force):工程師讓汽車行駛數百萬英里,以確定所設計的系統是否安全并按預期運行,該方法的困難在于所必須累積的測試里程數,這可能需要花費掉大量的時間。研究表明,自動駕駛汽車將需要大約2.75億英里的行駛里程來證明,在95%置信度的條件下,他們設計的自動駕駛汽車的故障率為每1億英里造成1.09起交通死亡事故,該數據相當于2013年美國的由人為原因所造成的交通死亡率。當然,為了表現出比人類更好的性能,自動駕駛汽車所需測試里程需達到數十億英里。
據蘭德公司(Rand Corporation)研究員尼迪-卡拉和蘇珊-帕多克估計,如果100輛自動駕駛汽車每天運行24小時,每年運行365天,以平均25英里/時(約合40公里/時)的速度行駛,則需要十多年時間才能積累2.75億英里測試里程數。
軟件在環或模型在環的仿真(Software-In-the-Loop (SiL) or Model-in-the-Loop (MiL) Simulations):另一種更可行的方法將現實世界的測試與仿真相結合,這可以大大減少汽車行業也已熟悉且必須完成的測試里程數,在仿真所構建的各種場景中,通過算法控制車輛進行相應的應對來證明所設計的系統確實可以在各種場景下做出正確的決定。
硬件在環的仿真(hardware-in-the-Loop,HiL):為了驗證真實硬件的運行情況,HiL仿真可以對其進行測試,并將預先記錄的傳感器數據提供給系統,此種技術路線降低了車輛測試和驗證的成本,并增加研發人員了對其設計的系統的信心。
最終,企業們可能會實施一種混合路線,應用上述所有方法,以期在最短的時間內實現所需的置信水平。
加速自動駕駛汽車的研發及部署進程
綜上所示,雖然目前的評估表明,大規模引入全自動駕駛汽車可能還需要10多年的時間,整個行業的參與者仍然可以通過多種方法來壓縮這一時間框架。
首先,參與到自動駕駛汽車產業的科技公司(注:如Waymo、Apple及Uber)應該認識到,單個公司獨立開發自動駕駛汽車所需的整套軟件和硬件系統是極具挑戰性的。因此,它們需要更加擅長合作和形成產業合作伙伴關系。具體來說,它們可以與行業的傳統參與者(如技術創業公司、一級供應商和汽車制造商)形成產業聯盟關系,在更細化的層面上,這意味著與對實現自動駕駛汽車非常重要的技術供應商進行合作,如激光雷達技術及地圖技術供應商。
其次,為幾家企業所專有的解決方案(Proprietary Solution)開發和驗證起來可能會過分地昂貴,因為它們要求這幾家參與企業承擔所有責任和風險。開放的心態和商定的標準不僅會加速進程,且能使正在開發的系統擁有更好的魯棒性。因此,以設計互通性部件(Interoperable Components)作為準則的開發模式,將起到鼓勵采用模塊化、即插即用系統開發框架的作用。
此外,另一種加快這一進程的方法是將致力于對組件的開發的行業風氣逐步轉到對集成系統的開發(Integrated System Development)。不同于目前行業主流的只專注于開發擁有特定用途的組件,業界需要更多地關注開發實際系統(Actual Systems),特別是考慮到自動駕駛汽車所面臨的艱巨的安全方面的難題。事實上,在車輛的整個生命周期中達到一定水平的可靠性和耐用性,將成為整個行業所必須完成的新的強制性任務,如同在航空業已經要求的那樣,而強調在系統層面進行開發可能是實現該目標的最佳方法。
全自動駕駛汽車可能會在未來幾年內實現,但是目前各家企業大都已在自動駕駛原型汽車最終將會如何呈現的賭局中投下了巨額賭注。自動駕駛汽車將會如何做出決策、感知周圍環境并保護其搭載的人員呢?想要掌控自動駕駛汽車產業戰略要素的傳統車企正面臨著一批技術上富有競爭力且資源雄厚的挑戰者,后者有能力給最優秀的業內人士(the best-positioned insider)提供難以拒絕的豐厚薪酬包。
鑒于自動駕駛汽車產業狂飆突進的發展速度,企圖在該產業中討得一杯羹的企業在戰略層面給自己定位以便快速抓住此次產業機會。而對于監管機構而言,需要追蹤最新的技術發展動態,以便在不妨礙技術創新的前提下,確保公眾的安全。
關于作者
Kersten Heineke是麥肯錫法蘭克福辦事處的合伙人,Philipp Kampshoff是休斯敦辦事處的合伙人,Armen Mkrtchyan是南加州辦事處的顧問,Emily Shao是芝加哥辦事處的顧問,他們都歸屬與麥肯錫未來出行中心(McKinsey Center for Future Mobility)。此外,作者希望感謝Aditya Ambadipudi,Johnathan Budd,Martin Kellner和Luca Pizzuto對本文的貢獻。









 工商網監
工商網監
評論