 電子發燒友App
電子發燒友App


3.自動駕駛系統概覽
自動駕駛系統的三個層級
自動駕駛系統分為三個層級:感知層,決策層,執行層。

感知層
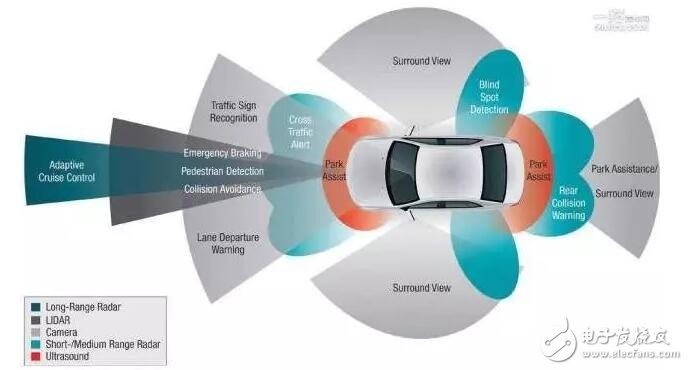
感知層用來完成對車輛周圍環境的感知識別。自動駕駛用到了各種各樣的傳感器,包括:攝像頭、毫米波雷達、激光雷達、超聲波雷達、紅外夜視,以及用于定位和導航的GPS(全球定位系統)和IMU(慣性測量單元)。還有一類技術雖然不是主動式的探測元件,但是屬于協同式的全局數據輔助,可以擴展智能車的環境感知能力,在感知層同樣扮演著不可或缺的角色,包括高精度地圖、V2X車聯網技術。每種類型的感知技術都有自己的優勢和弊端,它們相互補充融合,最終使智能車達到駕駛場景下非常高的安全性要求。國內企業在這一層做文章的非常多,后續小研會專門寫一篇文章解析自動駕駛傳感器的技術路線,欲知詳情請聽下回分解。
決策層
決策層是人工智能真正發揮威力的部分,和人類駕駛員一樣,機器在做駕駛決策時需要回答幾個問題,我在哪里?周邊環境如何?接下來會發生什么?我該做什么?決策層具體來說分為兩步,第一步認知理解,根據感知層收集的信息,對車輛自身的精確定位,對車輛周圍的環境的準確理解,第二步決策規劃,包含對接下來可能發生情況的準確預測,對下一步行動的準確判斷和規劃,選擇合理的路徑達到目標。
車輛定位
自動駕駛中車輛精確定位的方法主要有3種:
第一種是通過高精度的差分GPS+慣性導航IMU來完成,GPS定位精度高,但是刷新速度較慢,IMU刷新速度快,但是存在累積誤差,兩者配合使用剛好可以獲得快速且精確的位置信息。
第二種是通過激光雷達+高精度地圖來定位,將激光雷達掃描周圍環境所獲得的點云與高精度地圖進行比對和匹配,從而獲得位置信息。
第三種是通過攝像頭圖像數據+視覺地圖來定位,將攝像頭在行駛過程中拍攝到的圖像數據,包括圖像靜態信息和圖像間的移動信息,與視覺地圖進行比對和匹配,可以獲得位置信息。或者從圖像中提取一些關鍵目標及其精確的幾何特征(如車道線、地面標記、交通標牌、紅綠燈等),將其和高精度地圖中存儲的信息進行對應和匹配,完成定位功能。
環境理解
包括物體識別和物體追蹤,比如行人識別、車輛識別、車道識別、交通標識識別、行駛中車輛的追蹤、行動中行人的追蹤等。深度學習在這些應用中展現出了比傳統計算機視覺技術更好的性能,從而被廣泛應用。
行為預測
人類智能在駕駛中體現在可以根據動態變化的環境實時調整駕駛策略,同樣機器也需要對車輛周邊的人、車、物的行為進行預測,從而做出安全駕駛決策。
行動規劃
根據車身狀態數據、局部環境數據做出當下最優的行動選擇,包括加速、剎車、變換車道、轉彎等。
路徑規劃
從出行需求出發,在高精度地圖的基礎之上,根據全局路網數據和宏觀交通信息,繪制一條從出發點到目標點的最優行車路徑。
實事求是地說,國內真正進入到決策層的企業不多,有做園區、機場擺渡車的馭勢科技,做高速公路貨運的圖森互聯,還有做園區無人車和干預輔助類高級ADAS系統的智行者。你們聽說過的那些單目、雙目、環視視覺ADAS公司實現的大多是預警提示類功能,如碰撞預警、盲點監測等,只是停留在感知層面,沒有涉及到決策。相比之下國外在決策層探索的企業就很多了,Drive.ai,Comma.ai,nuTonomy,zoox,Faraday,Cruise,Otto,Navya等等。國內的路況確實比國外復雜得多,再加上中國政府還不允許自動駕駛車輛上路路測,這些都制約著國內企業在決策層發力。
識別算法業內有KITTI(用于評測目標檢測、目標跟蹤、語義分割等)和Cityscapes(用于評測像素級場景分割和實例標注等)等公開數據集進行評測,但是對決策質量和規劃能力的好壞還沒有統一評價標準,因而無從判斷各家技術能力的強弱,只能從公布的Demo中窺測一二。
執行層
自動駕駛的執行層離不開和車載控制系統的深度集成,可惜車廠和Tier1出于自我保護,不愿意對外開放車輛控制總線,一些創企無法對原車做改動,不得已只能另外附加一套電機裝置,通過電機拉動鋼絲繩,鋼絲繩再拉動油門、制動、轉向等裝置完成執行動作。這種做好確實非常笨拙,操控性和可靠性很差,根本無法體現自動駕駛的優勢。真正的自動駕駛必須要將決策控制信息與車輛底層控制系統深度集成,通過線控技術完成執行機構的電控化,達到電子制動、電子驅動和電子轉向。
歸根結底,自動駕駛的落腳點在“駕駛”不在“自動”,“大腦”再發達也要靠“雙腳”來行走。不把人工智能算法落地到車輛的控制執行,你永遠不知道有多少dirty work要做。例如車的轉向、制動、加速,你究竟要把方向盤打多大何時回輪、剎車踩多大、驅動給多少,人類司機是憑經驗來執行的,但是對自動駕駛系統來說,需要很多汽車動力學的knowhow才能完成。如果你只是單純地在計算機上跑幾個Demo,沒有實打實地上車路測過,哪家車廠敢用你的算法?真上路還不得撞得人仰馬翻?那些單靠幾個博士弄個算法跑個測試集刷刷榜就想出來融資的初創都是耍流氓。業內人打趣說,做自動駕駛只要撞死個人,公司就可以直接倒閉了,融的那點錢還不夠賠償費呢!大家所熟知的國內計算機視覺領域四大獨角獸,都未染指自動駕駛(商湯只是聲稱可以提供算法支持,和真正做自動駕駛還差得遠呢),視覺算法在人臉識別、安防監控領域落地相對比較容易,但是在自動駕駛領域要實實在在做車的話還是有很多坑的,這就是為什么國內涉及決策層和控制層的企業這么少的原因。
中國人要想碰執行層確實非常難,國內在線控技術上仍處在研發初始階段,技術底子薄,積累時間不足。國外車廠和Tier1壟斷了自動駕駛控制執行部分,同時它們在感知和決策部分也在不遺余力地投入研發,憑借多年積累的工程能力、產品化能力和汽車經驗,已有符合車規的產品成熟量產,對國內企業來說確實是不小的壓力。創業企業可以通過和國產車廠、國產供應商合作研發,共同抵制國外廠商,也可以和深諳執行器改裝的團隊合作,介入執行層,總之未來的競爭不會是單個企業實力的比拼,而是生態聯盟間的合縱連橫。
自動駕駛的基本技術架構
車載部分
感知層各種類型的傳感器采集、接收的數據,通過總線進行集成,再通過數據的融合和智能化處理,輸出自動駕駛所需的環境感知信息。車載傳感器的優化配置,可以在保證精度和安全性的基礎上,降低整體成本。
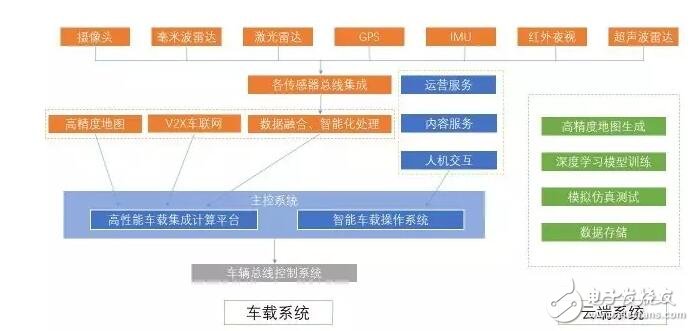
主控系統由硬件部分高性能車載集成計算平臺和軟件部分智能車載操作系統組成。計算平臺融合了傳感器、高精度地圖、V2X的感知信息進行認知和決策計算,硬件處理器可以有GPU、FPGA、ASIC等多種選擇,它們各自的優缺點可以參見小研以前的分析文章《AI時代,我的中國“芯”》。智能車載操作系統融合了車內人機交互、運營服務商、內容服務商的數據,為乘客提供個性化服務,真正把智能車變成下一個“互聯網入口”,目前的主流操作系統包括Android、Linux、Windows、QNX、YunOS(阿里云提供)等。
最后,決策的信息進入車輛總線控制系統,完成執行動作。
云端部分
自動駕駛車輛是一個移動系統,需要云平臺來提供支持。云端主要完成四個功能:
1. 數據存儲:智能車路測中實采的數據量非常大,需要傳輸到云端進行分布式存儲。
2. 仿真測試:開發的新算法在部署到車上之前會在云端的模擬器上進行測試。
3. 高精度地圖生成:地圖的生成采用眾包形式,把每輛在路上行駛的智能車實時采集到的激光點云或視覺數據上傳至云端,實現高精度地圖的完善和更新。
4. 深度學習模型訓練:自動駕駛的決策層使用了多種不同的深度學習模型,在《透析深度學習,其實它沒那么神秘》這篇文章中小研提到了深度學習算法存在“長尾”問題,對于沒見過的情況它處理不了,因此需要持續不斷地通過新數據進行模型訓練,來提升算法的處理能力。由于訓練的數據量非常大,所以要在云端完成。
自動駕駛領域未來的重大機遇
通過上文的梳理,小研認為自動駕駛領域未來三到五年重要的早期創業和投資機會在以下幾個方面:
1. 傳感器的選擇和優化配置
不同傳感器有各自的優缺點,沒有一種傳感器可以適用于任何使用環境。把各類傳感器的數據進行融合,達到寬適用范圍、高感知精度的同時,減少冗余配置,降低整體成本,提供傳感器集成方案。融合架構的搭建,多種數據類型的處理,融合算法的探索,都是非常有挑戰的工作,但是做好會有非常大的價值。
2. 高性能計算平臺
自動駕駛汽車產生的海量數據,需要車載人工智能大腦——高性能硬件計算平臺來處理,國內余凱博士領導的地平線機器人是這方面探索的先驅,小研在之前的文章《AI時代,我的中國“芯”》中介紹過。
3. 車聯網
近幾年國內后裝車聯網發展很快,形成了包含導航、娛樂、金融、交互、服務等功能的生態圈,未來會逐步向以智能車載操作系統為核心的前裝業務演變。國內LTE-V車聯網專用通信標準將于今年出臺,可利用現有蜂窩網絡基礎設施,成為自動駕駛感知機構的延伸。
4. 運營服務
汽車智能化以后會成為下一個移動終端,未來會有越來越多的運營服務商涌現,也會有更多基于內容資源、平臺服務、共享經濟的新商業模式衍生出來。
5. 車載集成系統
面向自動駕駛的車載集成系統,需將感知、決策層的技術架構和車輛總線控制系統結合起來重新設計,將卓越的算法落地到安全、魯棒的執行中。
6. 云端
做支持自動駕駛的云平臺的公司同樣值得關注,包括數據集成、眾包地圖、模擬器、模型再訓練平臺等。
4.自動駕駛的商業化之路
自動駕駛的商業化應用有貨運和客運兩大塊。貨運的需求方比較明朗,有礦山和港口運營公司、物流公司、電商、出行服務運營商等,貨運的工況主要是高速公路、礦區、港口等相對單一封閉的區域,實現起來更容易一些。客運在開放道路上運營還是非常困難的,目前能夠落地的應用場景主要是園區低速自動駕駛,未來可能會探索給滴滴、UBER這樣的運營商提供固定區域內的自動駕駛運營服務,等各類駕駛場景都驗證成熟以后才會推向開放區域,最后才是賣給個人,這條路還是很漫長的。
前段時間百度無人車開源了阿波羅平臺,就有好事之徒寫了“百度無人車扔下原子彈,炸掉行業百億美金投資”的軟文,大有誤導公眾之嫌。其實自動駕駛產業剛剛起步,行業標準和技術架構都沒完善,未來還需要持續探索,百度開源算法對推動整個行業的進步絕對是好事情。
汽車是個很大的產業,產業鏈上各個環節都有活得很好的公司,自動駕駛由于信息技術和人工智能的加持,擁有比傳統汽車產業更大的市場空間,更何況電動化、智能化大潮的到來使中國企業擺脫了“歷史包袱”,和國外企業站在同一起跑線上,彎道超車的機會大大的有,你且看所有一線基金在自動駕駛領域都有投資布局就能明白它到底有多被看好。
從全文的梳理可以看出,自動駕駛領域有些方向的timing已經到了,而有些方向還沒到。當下我們更應該保持耐心,隨著技術和產業的逐漸成熟,這些機會的啟動點會一個個到來,自動駕駛是一波大的浪潮,未來十年都值得我們持續關注。









 工商網監
工商網監
評論