可帶來(lái)3%左右的額外提升,同時(shí)也可帶來(lái)一定駕駛舒適性方面的改善。 為了實(shí)現(xiàn)這一功能,整車(chē)需要集成攝像頭和毫米波雷達(dá)等設(shè)備以及需要利用地圖得到前方道路曲率坡度等信息,需要開(kāi)發(fā)基于預(yù)測(cè)的整車(chē)控制策略以適應(yīng)復(fù)雜工況,同時(shí)需要
2017-12-05 07:27:00 3580
3580 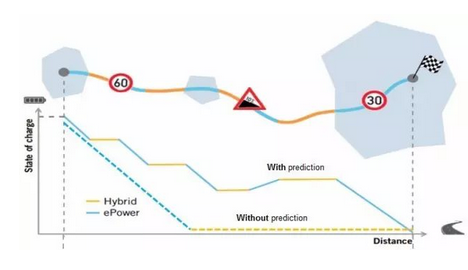
2014北京國(guó)際道路運(yùn)輸、城市公交車(chē)輛及零部件展覽會(huì) 日期DATE:2014 年5月14-16日May 14 - 16, 2014地點(diǎn): VENUE北京*中國(guó)國(guó)家會(huì)議中心China National
2013-10-13 11:11:22
51單片機(jī)開(kāi)發(fā)與應(yīng)用技術(shù)詳解(珍藏版)PPT及源碼
2022-03-01 10:40:48
有效的手段。本設(shè)計(jì)通過(guò)無(wú)線數(shù)據(jù)采集系統(tǒng)開(kāi)發(fā)的車(chē)輛進(jìn)出智能管理系統(tǒng)效的解決了各單位所面臨的車(chē)輛管理問(wèn)題,應(yīng)用于停車(chē)場(chǎng)收費(fèi)管理與進(jìn)出車(chē)輛控制,車(chē)主無(wú)需停車(chē)即可出入停車(chē)場(chǎng),通過(guò)電腦自動(dòng)識(shí)別持卡人身份,確定對(duì)車(chē)
2010-01-22 10:33:44
的手段。本設(shè)計(jì)通過(guò)無(wú)線數(shù)據(jù)采集系統(tǒng)開(kāi)發(fā)的車(chē)輛進(jìn)出智能管理系統(tǒng)效的解決了各單位所面臨的車(chē)輛管理問(wèn)題,應(yīng)用于停車(chē)場(chǎng)收費(fèi)管理與進(jìn)出車(chē)輛控制,車(chē)主無(wú)需停車(chē)即可出入停車(chē)場(chǎng),通過(guò)電腦自動(dòng)識(shí)別持卡人身份,確定對(duì)車(chē)
2010-01-28 11:31:23
的目的。并且改進(jìn)后的 Di jkstra算法客服了傳統(tǒng)的 Dijkstra算法計(jì)算盲目性計(jì)算的缺點(diǎn),提高了路徑搜尋的技術(shù)效率關(guān)鍵詞:車(chē)輛導(dǎo)航系統(tǒng):最優(yōu)路徑:道路權(quán)重:Di jkstra算法:c#語(yǔ)言
2023-09-21 06:25:55
。基于嵌入式技術(shù)、雙冗余CAN總線與LIN總線構(gòu)成的車(chē)輛智能配電系統(tǒng),能夠很好地解決傳統(tǒng)車(chē)輛配電方式的缺點(diǎn),并且能夠?qū)崿F(xiàn)整車(chē)配電系統(tǒng)的智能化、數(shù)字化管理。
2019-08-29 07:14:25
車(chē)輛油耗快速檢測(cè)系統(tǒng)的開(kāi)發(fā)與試驗(yàn)尋求開(kāi)發(fā)新的汽車(chē)燃油耗檢測(cè)儀以適應(yīng)社會(huì)發(fā)展的需要,是擺在廣大科技工作者面前的一項(xiàng)重大課題。有關(guān)資料表明,利用碳平衡法建立一套系統(tǒng)測(cè)量汽車(chē)發(fā)動(dòng)機(jī)燃油消耗量能縮短檢測(cè)
2009-12-02 12:44:03
汽車(chē)走進(jìn)千家萬(wàn)戶,安全愈加顯的重要。駕乘人員的安全和所用車(chē)輛的電子系統(tǒng)是否先進(jìn)密切相關(guān)。安全氣囊ABS(Anti-lock Break system)系統(tǒng)已是大家十分熟悉的常規(guī)安全保護(hù)系統(tǒng)。車(chē)輛穩(wěn)定
2019-09-29 10:06:10
車(chē)輛自動(dòng)識(shí)別稱(chēng)重系統(tǒng)的工作原理車(chē)輛自動(dòng)識(shí)別稱(chēng)重系統(tǒng)組成車(chē)輛自動(dòng)識(shí)別稱(chēng)重系統(tǒng)典型方案示意圖車(chē)輛自動(dòng)識(shí)別稱(chēng)重系統(tǒng)給用戶帶來(lái)的利益
2021-03-01 09:31:55
了協(xié)同作用。2. 引言無(wú)論從物理還是技術(shù)角度講,機(jī)動(dòng)車(chē)和駕駛員面臨的汽車(chē)信息安全需求和問(wèn)題都不同。a) 對(duì)于機(jī)動(dòng)車(chē)而言– 防盜保護(hù):防盜系統(tǒng);– 法律限制:電子行車(chē)記錄儀、電子道路收費(fèi)、電子車(chē)輛登記
2018-12-03 13:57:59
了解牢固掌握ATmega8的開(kāi)發(fā)與應(yīng)用,廣州雙龍電子有限公司迅速開(kāi)發(fā)出SL-MEGA8開(kāi)發(fā)實(shí)驗(yàn)器(評(píng)估系統(tǒng)),硬件模塊充份考慮到ATmega8的性能特點(diǎn)及其配套電路接口,軟件上也給用戶提供相應(yīng)的軟件模塊
2011-03-09 12:31:40
STM32開(kāi)發(fā)板 STM32F103RCT6最小系統(tǒng)板 ARM 一鍵串口下載 液晶屏
2023-04-04 11:05:04
《CPLD_FPGA的開(kāi)發(fā)與應(yīng)用》
2012-08-17 09:47:53
英國(guó)汽車(chē)電子EMI標(biāo)準(zhǔn)BS ISO11451-4道路車(chē)輛 來(lái)自窄帶輻射電磁場(chǎng)能量電磁騷擾 車(chē)輛:大電流注入式
2015-08-05 23:19:23
技術(shù)的開(kāi)發(fā)與應(yīng)用,包括藍(lán)牙模塊介紹、藍(lán)牙開(kāi)發(fā)工具使用說(shuō)明、藍(lán)牙嵌入式開(kāi)發(fā)的方法和典型藍(lán)牙產(chǎn)品的軟、硬件開(kāi)發(fā)實(shí)例等。書(shū)中通過(guò)多種藍(lán)牙產(chǎn)品的設(shè)計(jì)實(shí)例分析,讀者可以熟練掌握藍(lán)牙的開(kāi)發(fā)與應(yīng)用。 藍(lán)牙技術(shù)
2017-09-21 18:05:23
本文提出的基于無(wú)線定位技術(shù)的車(chē)輛檢測(cè)系統(tǒng)將通過(guò)在實(shí)用道路交通設(shè)施頻率高、能反映交通特征的出租車(chē)和公交車(chē)上部署車(chē)載移動(dòng)定位裝置,將其作為動(dòng)態(tài)交通參數(shù)采集車(chē)輛,測(cè)量車(chē)輛實(shí)時(shí)地理坐標(biāo),計(jì)算車(chē)輛行駛速度,并結(jié)合智能交通地理信息系統(tǒng),為交通控制提供實(shí)時(shí)交通信息、交通態(tài)勢(shì)和交通評(píng)估參數(shù)等。
2021-05-18 06:42:13
,并在車(chē)輛遠(yuǎn)離時(shí)切換回原始狀態(tài)。HBA對(duì)經(jīng)常會(huì)在夜間行駛的駕駛者來(lái)說(shuō)具有顯著的實(shí)際效用。? TSR (Traffic Sign Recognition)道路交通標(biāo)志識(shí)別系統(tǒng)TSR是一種提前識(shí)別和判斷
2015-07-09 14:16:04
單片機(jī)無(wú)線通信模塊開(kāi)發(fā)與應(yīng)用
2012-08-18 20:19:51
GPS與GPRS分別是什么?基于GPS/GPRS的車(chē)輛監(jiān)控系統(tǒng)是由哪些部分組成的?基于GPS/GPRS的車(chē)輛監(jiān)控系統(tǒng)如何去實(shí)現(xiàn)?
2021-05-14 06:36:50
計(jì)算機(jī)專(zhuān)業(yè)畢業(yè)設(shè)計(jì)題目大全一、ASP類(lèi)計(jì)算機(jī)專(zhuān)業(yè)畢業(yè)設(shè)計(jì)題目1.網(wǎng)絡(luò)留言薄2.客戶管理系統(tǒng)3.多媒體積件管理庫(kù)的開(kāi)發(fā)與應(yīng)用4.基于WEB的多媒體素材管理庫(kù)的開(kāi)發(fā)與應(yīng)用5.網(wǎng)絡(luò)教學(xué)軟件中的教學(xué)
2021-07-19 09:30:30
基于無(wú)線USB技術(shù)的系統(tǒng)開(kāi)發(fā)與應(yīng)用,不看肯定后悔
2021-05-26 06:28:34
)系統(tǒng)可對(duì)注冊(cè)車(chē)輛實(shí)施動(dòng)態(tài)跟蹤、監(jiān)控、拍照、行車(chē)記錄、管理等功能,對(duì)于監(jiān)控車(chē)輛,可以在電子地圖上顯示出來(lái),并保存車(chē)輛運(yùn)行軌跡數(shù)據(jù);(5)保證系統(tǒng)安全的前提下采用國(guó)際通用的系統(tǒng)規(guī)范和傳輸協(xié)議,能比較容易的實(shí)現(xiàn)與其他系統(tǒng)的網(wǎng)絡(luò)連接和數(shù)據(jù)共享以及系統(tǒng)擴(kuò)容。
2010-08-05 09:38:06
NXP圖說(shuō):嵌入式MCU固件開(kāi)發(fā)與應(yīng)用
2020-04-13 11:48:51
隨著我國(guó)經(jīng)濟(jì)的發(fā)展,機(jī)動(dòng)車(chē)輛不斷地增長(zhǎng),現(xiàn)有道路等硬件設(shè)施的增長(zhǎng)已經(jīng)滿足不了日益膨脹的交通問(wèn)題,智能交通系統(tǒng)(Intelligent Transportation System,ITS)越來(lái)越受重視
2019-09-05 07:05:23
需要通過(guò)3dmax建模構(gòu)造一個(gè)簡(jiǎn)單的城市道路模型,通過(guò)labview來(lái)實(shí)現(xiàn)車(chē)輛在道路模型中的行駛控制,如何使用labview來(lái)控制模型中車(chē)輛的運(yùn)行。急求各位大神幫忙
2018-04-24 12:31:26
的浮動(dòng)車(chē),在其行駛過(guò)程中定期記錄的車(chē)輛位置、方向和速度信息,應(yīng)用地圖匹配、路徑推測(cè)等相關(guān)的計(jì)算模型和算法進(jìn)行處理,使浮動(dòng)車(chē)位置數(shù)據(jù)和城市道路在時(shí)間和空間上關(guān)聯(lián)起來(lái),最終得到浮動(dòng)車(chē)所經(jīng)過(guò)道路的車(chē)輛行駛速度
2017-11-28 14:42:07
在檢測(cè)道路行駛過(guò)程中的車(chē)輛或行人的存在或者行為狀態(tài)所用到的感應(yīng)器件
2019-06-08 10:33:41
系統(tǒng)、數(shù)據(jù)處理系統(tǒng)構(gòu)成,可以實(shí)現(xiàn)車(chē)輛的智能化識(shí)別、定位、跟蹤、測(cè)速、監(jiān)控和管理,以解決當(dāng)前嚴(yán)峻的道路擁堵、車(chē)輛超速超載、車(chē)輛盜竊及公務(wù)車(chē)管理等問(wèn)題。
2019-08-21 08:21:17
隨著我國(guó)經(jīng)濟(jì)的發(fā)展,機(jī)動(dòng)車(chē)輛不斷地增長(zhǎng),現(xiàn)有道路等硬件設(shè)施的增長(zhǎng)已經(jīng)滿足不了日益膨脹的交通問(wèn)題,智能交通系統(tǒng)(Intelligent Transportation System,ITS)越來(lái)越受重視。
2020-04-06 06:34:57
方案概述非道路車(chē)輛智能輔助駕駛解決方案通過(guò)車(chē)與車(chē)、車(chē)與人、車(chē)與路互聯(lián)互通實(shí)現(xiàn)信息共享,收集車(chē)輛、道路和環(huán)境的信息,并在信息網(wǎng)絡(luò)平臺(tái)上對(duì)多源采集的信息進(jìn)行加工、計(jì)算、共享和安全發(fā)布,能夠?qū)崿F(xiàn)車(chē)輛狀態(tài)
2017-03-24 13:56:40
,進(jìn)行離線分析,了解整機(jī)狀態(tài),提供合理的建議及解決方案。開(kāi)發(fā)快采用的數(shù)字化智能控制系統(tǒng)控制線路精巧,功耗低,無(wú)火花,理論上其壽命是傳統(tǒng)的非道路移動(dòng)機(jī)械控制系統(tǒng)的10倍。此外,智能設(shè)備往往成本得到了降低
2017-06-15 10:02:47
根軌跡的基本概念根軌跡的繪制準(zhǔn)則特殊根軌跡利用根軌跡分析閉環(huán)系統(tǒng)用MATLAB繪制根軌跡我們知道,閉環(huán)系統(tǒng)的穩(wěn)定性取決于閉環(huán)系統(tǒng)的極點(diǎn)分布,其它性能取決于
2009-01-08 14:13:24 3
3 本標(biāo)準(zhǔn)規(guī)定了道路運(yùn)輸危險(xiǎn)貨物車(chē)輛標(biāo)志的技術(shù)要求、試驗(yàn)方法、檢驗(yàn)規(guī)則以及包裝、標(biāo)志、運(yùn)輸、裝卸和儲(chǔ)存。本標(biāo)準(zhǔn)適用于道路運(yùn)輸危險(xiǎn)貨物車(chē)輛標(biāo)志的生產(chǎn)、流通過(guò)程以及
2009-03-02 22:53:1022 電力系統(tǒng)短期負(fù)荷預(yù)測(cè)對(duì)電力系統(tǒng)運(yùn)行設(shè)計(jì)具有十分重要的意義。因此,在分析了電力負(fù)荷運(yùn)行曲線的基礎(chǔ)上,提出了一種基于級(jí)聯(lián)模糊神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)模型。該模型采用基于神經(jīng)
2009-03-16 09:16:3519 經(jīng)濟(jì)型網(wǎng)絡(luò)化數(shù)控系統(tǒng)的開(kāi)發(fā)與應(yīng)用文中介紹了基于工業(yè)PC和專(zhuān)用DSP運(yùn)動(dòng)控制技術(shù)的經(jīng)濟(jì)型網(wǎng)絡(luò)化開(kāi)放式數(shù)控系統(tǒng)。在WINDOWS平臺(tái)下,利用PC豐富成熟的資源和專(zhuān)用DSP MCX314AS強(qiáng)大的運(yùn)
2009-05-05 21:57:3618 為了智能監(jiān)控道路車(chē)流量,本文應(yīng)用幀間差分方法建立了適用于公路環(huán)境的機(jī)器視覺(jué)系統(tǒng)。系統(tǒng)所用方法可以自動(dòng)識(shí)別視頻場(chǎng)景內(nèi)所有移動(dòng)車(chē)輛,計(jì)算每個(gè)目標(biāo)的位置、面積,統(tǒng)
2009-09-12 15:40:5318 SNHAS軟件操作系統(tǒng)的開(kāi)發(fā)與應(yīng)用:將信息技術(shù)、統(tǒng)計(jì)學(xué)技術(shù)引人傳統(tǒng)生命科學(xué)研究分析領(lǐng)域,替代人工進(jìn)行大量繁瑣的統(tǒng)計(jì)計(jì)算擬合工作,是當(dāng)今生物信息技術(shù)應(yīng)用發(fā)展的方向之一.
2009-10-25 12:22:0510 人機(jī)界面的開(kāi)發(fā)與應(yīng)用彭彥卿,廈門(mén)理工學(xué)院電子與電氣工程系,廈門(mén)市廈港新村72號(hào)605,361005[摘 要] 研究人機(jī)界面主畫(huà)面、參數(shù)設(shè)定與顯示畫(huà)面、報(bào)警顯示畫(huà)面的開(kāi)發(fā)與應(yīng)用
2009-11-01 09:25:2121 硅通孔互連技術(shù)的開(kāi)發(fā)與應(yīng)用封國(guó)強(qiáng) 蔡堅(jiān) 王水弟(清華大學(xué)微電子學(xué)研究所,北京,100084,中國(guó))摘要:隨著三維疊層封裝、MEMS 封裝、垂直集成傳感器陣列以及臺(tái)面MOS 功
2009-12-14 11:35:449 盾構(gòu)姿態(tài)自動(dòng)測(cè)量系統(tǒng)的開(kāi)發(fā)與應(yīng)用摘要:綜合國(guó)內(nèi)外既有測(cè)量系統(tǒng)優(yōu)點(diǎn)和通過(guò)用戶需求的調(diào)研,開(kāi)發(fā)了一套集盾構(gòu)自動(dòng)導(dǎo)向測(cè)量和工程動(dòng)態(tài)管理可視化、操作簡(jiǎn)單、自動(dòng)化程
2010-05-26 18:05:4911 于虛擬儀器技術(shù)設(shè)計(jì)了用在車(chē)輛控制器開(kāi)發(fā)中的道路試驗(yàn)測(cè)試系統(tǒng),介紹了通過(guò)外部特征量和單片機(jī)內(nèi)部運(yùn)行信息的同步采集進(jìn)行車(chē)輛控制器道路試驗(yàn)的方法、測(cè)試系統(tǒng)的硬件構(gòu)成
2010-07-19 16:15:0312 由于目前直流電源設(shè)備缺乏現(xiàn)場(chǎng)檢測(cè)技術(shù)手段,對(duì)安全運(yùn)行構(gòu)成威脅。文章分析了直流電源現(xiàn)場(chǎng)檢測(cè)的必要性,介紹一種移動(dòng)式直流電源微機(jī)檢測(cè)系統(tǒng)的開(kāi)發(fā)與應(yīng)用。關(guān)鍵詞
2010-11-05 20:31:1829 參數(shù)根軌跡和多回路系統(tǒng)的根軌跡
2009-07-27 14:22:391354 摘要:智能運(yùn)輸系統(tǒng)的前提條件之一是實(shí)現(xiàn)道路行駛車(chē)輛自動(dòng)檢測(cè)與交通信息實(shí)時(shí)采集。詳細(xì)分析了磁感應(yīng)式行駛車(chē)輛檢測(cè)工作原理,建立了道路交通流信息計(jì)算模型,完成了基于DSP技術(shù)的智能檢測(cè)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn),采取了軟硬件綜合技術(shù)來(lái)對(duì)付現(xiàn)場(chǎng)各種干擾與噪聲信號(hào)。對(duì)
2011-02-16 17:20:4778 研究基于RFID技術(shù)的車(chē)輛出入管理系統(tǒng),該系統(tǒng)分為車(chē)輛出入控制和車(chē)輛管理信息兩個(gè)子系統(tǒng)。車(chē)輛出入小區(qū)的控制子系統(tǒng)使用歐姆龍PLC。在SQLServer2000數(shù)據(jù)庫(kù)環(huán)境下,使用VB語(yǔ)言開(kāi)發(fā)了車(chē)
2013-06-26 16:13:37177 51單片機(jī)C語(yǔ)言開(kāi)發(fā)與應(yīng)用技術(shù)案例詳解,希望對(duì)對(duì)單片機(jī)感興趣的朋友有用
2015-11-18 16:36:3120 超聲波測(cè)距在智能機(jī)器人中的開(kāi)發(fā)與應(yīng)用!資料來(lái)源網(wǎng)絡(luò),如有侵權(quán),敬請(qǐng)見(jiàn)諒
2015-11-23 18:33:1411 道路試驗(yàn)遠(yuǎn)程采集監(jiān)控系統(tǒng)為道路試驗(yàn)提供了完成的數(shù)據(jù)分析、試驗(yàn)管理、規(guī)范管理、車(chē)輛管理、駕駛員管理等解決方案。
2015-11-24 18:27:5012 GBT 28046.4-2011 道路車(chē)輛 電氣及電子設(shè)備的環(huán)境條件和試驗(yàn) 第4部分 氣候負(fù)荷
2016-07-06 16:08:4180 級(jí)聯(lián)H橋多電平并網(wǎng)逆變器的模型預(yù)測(cè)控制研究_楊騰飛
2017-01-08 10:57:068 一種用于高精度隨動(dòng)控制系統(tǒng)的軌跡預(yù)測(cè)方法_巫佩軍
2017-01-07 15:26:080 橇裝化天然氣脫硫裝置控制系統(tǒng)開(kāi)發(fā)與應(yīng)用_鄒濤
2017-01-30 23:17:310 可編程邏輯器件原理、開(kāi)發(fā)與應(yīng)用
2017-09-19 16:04:4919 隨著我國(guó)經(jīng)濟(jì)的快速發(fā)展,車(chē)輛逐年增加,同時(shí)所造成的交通事故也在逐年上升,車(chē)輛監(jiān)管越來(lái)越受人們的重視。目前,車(chē)輛管理中,獲取車(chē)輛歷史軌跡信息的方式有兩種:一種是通過(guò)車(chē)載終端與CPS通信,在GPS接收
2017-11-05 10:04:4318 針對(duì)基于Kalman濾波的跟蹤方法需要對(duì)噪聲特性和軌跡的運(yùn)動(dòng)規(guī)律進(jìn)行假設(shè)的不足,將新陳代謝一個(gè)變量的一階灰色模型(GM(1,1)引入動(dòng)態(tài)軌跡預(yù)測(cè)方法,提出一種基于加權(quán)灰色GM(1,1)模型的動(dòng)態(tài)軌跡
2017-12-19 15:30:151 智能手機(jī)、車(chē)載GPS終端、可穿戴設(shè)備產(chǎn)生了海量的軌跡數(shù)據(jù)。這些數(shù)據(jù)不僅描述了移動(dòng)對(duì)象的歷史軌跡。而且精確地反映出移動(dòng)對(duì)象的運(yùn)動(dòng)特點(diǎn).已有軌跡預(yù)測(cè)方法的不足在于:不能同時(shí)兼具預(yù)測(cè)的準(zhǔn)確性和時(shí)效性。有效
2017-12-25 15:18:060 本文在目標(biāo)軌跡預(yù)測(cè)中采用了數(shù)據(jù)挖掘的方法,提出了一個(gè)具體的基于移動(dòng)模式匹配的目標(biāo)軌跡預(yù)測(cè)算法。該方法通過(guò)不斷挖掘歷史移動(dòng)軌跡來(lái)構(gòu)造前綴共享樹(shù)的方法挖掘出頻繁移動(dòng)模式,之后通過(guò)模式匹配預(yù)測(cè)出目標(biāo)的移動(dòng)軌跡。仿真結(jié)果表明該算法的時(shí)間消耗和空間消耗較小,同時(shí)具有很高的預(yù)測(cè)準(zhǔn)確性。
2017-12-27 17:01:161 針對(duì)移動(dòng)對(duì)象軌跡預(yù)測(cè)所面臨的數(shù)據(jù)稀疏問(wèn)題,即有效的歷史軌跡空間不能覆蓋所有可能的查詢(xún)軌跡,提出了一種基于迭代網(wǎng)格劃分和熵估計(jì)的稀疏軌跡預(yù)測(cè)算法(r IPDS-ICPEE)。首先,對(duì)軌跡區(qū)域進(jìn)行迭代
2017-12-29 11:26:561 路徑規(guī)劃是智能車(chē)輛導(dǎo)航和控制的基礎(chǔ),是從軌跡決策的角度考慮的,可分為局部路徑規(guī)劃和全局路徑規(guī)劃。全局路徑規(guī)劃的任務(wù)是根據(jù)全局地圖數(shù)據(jù)庫(kù)信息規(guī)劃出自起始點(diǎn)至目標(biāo)點(diǎn)的一條無(wú)碰撞、可通過(guò)的路徑。由于全局
2018-10-19 11:17:5422602 
為了預(yù)測(cè)轉(zhuǎn)彎車(chē)輛的軌跡,我們生成了未來(lái)的期望速度。我們期望的速度模型由兩個(gè)三次函數(shù)組成,它是用相交幾何來(lái)生成的。為了解決無(wú)法從任何位置創(chuàng)建[ 1 ]的速度模型的問(wèn)題,我們?cè)诘貓D中建立了速度控制點(diǎn)。速度控制點(diǎn)被定義為速度變得最小的位置。
2018-11-07 15:18:547571 針對(duì)車(chē)聯(lián)網(wǎng)環(huán)境下若干典型車(chē)輛軌跡規(guī)劃方法存在車(chē)速與軌跡波動(dòng)性較大的問(wèn)題,提出一種基于改進(jìn)人工魚(yú)群算法的車(chē)輛軌跡規(guī)劃方法。該方法以短程通信( DSRC)的車(chē)聯(lián)網(wǎng)應(yīng)用場(chǎng)景為設(shè)計(jì)平臺(tái),以車(chē)輛的最優(yōu)行車(chē)
2018-12-13 10:57:599 自動(dòng)駕駛里面很重要的就是估計(jì)和預(yù)測(cè)交通情況。預(yù)測(cè)的來(lái)源就是路上各種物體的姿態(tài)和速度歷史,高級(jí)的預(yù)測(cè)會(huì)包括可能的行動(dòng)軌跡。
2019-02-21 10:11:433601 針對(duì)長(zhǎng) 短期記憶網(wǎng)絡(luò)(LSTM) 在行人軌跡預(yù)測(cè)問(wèn)題中孤立考慮單個(gè)行人,且無(wú)法進(jìn)行多種可能性預(yù)測(cè)的問(wèn)題,提出基于注意力機(jī)制的行人軌跡預(yù)測(cè)生成模型(AttenGAN),來(lái)對(duì)行人交互模式進(jìn)行建模和概率
2019-04-04 14:06:1614 近日,英特爾子公司Mobileye在2019北京國(guó)際道路運(yùn)輸、城市公交車(chē)輛及零部件展覽會(huì)(以下簡(jiǎn)稱(chēng)“2019道路運(yùn)輸車(chē)輛展”)上展出了一系列針對(duì)大型車(chē)輛的高級(jí)駕駛輔助系統(tǒng)(ADAS)產(chǎn)品。當(dāng)前,Mobileye正憑借其領(lǐng)先的ADAS產(chǎn)品讓道路和駕駛更安全,在實(shí)現(xiàn)挽救生命愿景的同時(shí)推動(dòng)智慧交通發(fā)展進(jìn)程。
2019-06-05 14:53:213405 將時(shí)態(tài)信息添加到深度學(xué)習(xí)當(dāng)中,使自動(dòng)駕駛汽車(chē)能夠預(yù)測(cè)周?chē)苿?dòng)目標(biāo)的未來(lái)軌跡。
2019-06-05 16:04:355090 邊緣計(jì)算與物聯(lián)網(wǎng)為核心的道路基礎(chǔ)設(shè)施智能化產(chǎn)品開(kāi)發(fā)與應(yīng)用孵化,包括精準(zhǔn)天氣與交通預(yù)測(cè)預(yù)警、推進(jìn)共同建設(shè)以“5G車(chē)路協(xié)同”及自動(dòng)/輔助駕駛技術(shù)等為基礎(chǔ)的車(chē)路協(xié)同創(chuàng)新實(shí)驗(yàn)基地、開(kāi)展省級(jí)高速公路高精地圖GIS+BIM一張圖平臺(tái)應(yīng)用研發(fā)等。
2019-06-18 11:07:23734 開(kāi)發(fā)與應(yīng)用RFID技術(shù)將資產(chǎn)日常管理活動(dòng)與現(xiàn)有資產(chǎn)管理系統(tǒng)有效的結(jié)合在一起,從而實(shí)現(xiàn)資產(chǎn)實(shí)物與系統(tǒng)信息的實(shí)時(shí)同步交互。
2019-07-30 14:08:284490 我們的人生軌跡可能受家庭、社會(huì)、時(shí)代影響,也因大大小小的決定被改變。我們無(wú)法預(yù)知的未來(lái),AI 可以準(zhǔn)確地預(yù)測(cè)嗎?
2020-04-09 09:23:07669 福特正在與英國(guó)牛津郡議會(huì)合作開(kāi)發(fā)一種數(shù)字道路安全工具,該工具可以使用來(lái)自互聯(lián)車(chē)輛和路邊傳感器等來(lái)源的數(shù)據(jù),預(yù)測(cè)潛在的道路交通事故熱點(diǎn)。
2020-09-08 09:43:462307 海面艦船的軌跡預(yù)測(cè)對(duì)預(yù)測(cè)精度和實(shí)時(shí)性具有較高要求,而艦船軌跡數(shù)據(jù)特征的高復(fù)雜度特性,導(dǎo)致傳統(tǒng)預(yù)測(cè)算法精度低、耗時(shí)長(zhǎng),難以達(dá)到良好的預(yù)測(cè)效果。為此,提出一種基于變分自編碼器的海面艦船軌跡預(yù)測(cè)
2021-03-30 09:53:425 采用深度學(xué)習(xí)進(jìn)行船舶軌跡序列預(yù)測(cè)對(duì)于智能航運(yùn)具有重要意義。船舶自動(dòng)識(shí)別系統(tǒng)( Automatic Identification System,AlS)蘊(yùn)藏著大量船舶軌跡特征,基于ΔlS數(shù)據(jù)預(yù)測(cè)船舶
2021-05-07 14:18:000 在線社交媒體極大地促進(jìn)了信息的產(chǎn)生和傳遞,加速了海量信息之間的傳播與交互,使預(yù)測(cè)信息級(jí)聯(lián)的重要性逐漸突顯。近年來(lái),深度學(xué)習(xí)已經(jīng)被廣泛用于信息級(jí)聯(lián)預(yù)測(cè)( Information Cascade
2021-05-18 15:28:219 信息級(jí)聯(lián)預(yù)測(cè)( Information Cascade prediction)是社交網(wǎng)絡(luò)分析領(lǐng)域的一個(gè)研究熱點(diǎn),其通過(guò)信息級(jí)聯(lián)的擴(kuò)散序列與拓?fù)鋱D來(lái)學(xué)習(xí)在線社交媒體中信息的傳播模式。當(dāng)前的信息級(jí)聯(lián)預(yù)測(cè)
2021-05-29 14:52:268 基于LabVIEW的機(jī)器視覺(jué)系統(tǒng)開(kāi)發(fā)與應(yīng)用說(shuō)明。
2021-06-01 09:33:20125 要想在數(shù)據(jù)可視化報(bào)表上直觀展現(xiàn)車(chē)輛行駛軌跡,那就要使用路線地圖了。路線地圖是奧威BI數(shù)據(jù)可視化工具上的一個(gè)地圖圖表,主要用于直觀(動(dòng)態(tài))展示行人、車(chē)輛等的運(yùn)動(dòng)軌跡。
2021-10-09 11:32:25960 Linux+嵌入式實(shí)時(shí)操作系統(tǒng)開(kāi)發(fā)與應(yīng)用(嵌入式開(kāi)發(fā)項(xiàng)目實(shí)戰(zhàn))-Linux+嵌入式實(shí)時(shí)操作系統(tǒng)開(kāi)發(fā)與應(yīng)用
2021-07-30 13:28:1621 電警系統(tǒng)道路常亮補(bǔ)光燈”在總結(jié)了各地的經(jīng)驗(yàn),結(jié)合高畫(huà)質(zhì)智能攝像機(jī)的基礎(chǔ)上研制成功,該系統(tǒng)是一種以地感線圈觸發(fā)方式為主的智能化高清晰電子警察系統(tǒng),該系統(tǒng)可對(duì)通過(guò)各路口的每一車(chē)輛進(jìn)行監(jiān)測(cè)、定位、跟蹤
2021-11-23 16:14:541078 、車(chē)輛及存儲(chǔ)介質(zhì),以解決相關(guān)技術(shù)中存在的問(wèn)題。該方法包括:基于衛(wèi)星定位系統(tǒng)數(shù)據(jù),確定車(chē)輛所處目標(biāo)位置周?chē)暮蜻x道路;確定所述候選道路對(duì)應(yīng)的目標(biāo)狀態(tài)概率,所述目標(biāo)狀態(tài)概率是基于所述車(chē)輛上設(shè)置的多個(gè)傳感器采集到的傳感器數(shù)據(jù)、圖像
2022-05-31 15:12:101244 摘要:軌跡預(yù)測(cè)是自動(dòng)駕駛系統(tǒng)中不可或缺的一環(huán),對(duì)幫助理解車(chē)體周?chē)h(huán)境和其它人、車(chē)的意圖有著至關(guān)重要的作用。在2022年Waymo自動(dòng)駕駛數(shù)據(jù)集挑戰(zhàn)賽上,地平線使用了HBEns模型框架,基于“在單模型的輸出上使用模型聚合”的二階段思路,大幅提升了總體軌跡預(yù)測(cè)精度,同時(shí)給予了較高的模型設(shè)計(jì)自由性。
2022-07-10 11:09:35671 ISO 16750的本部分適用于道路車(chē)輛的電氣和電子系統(tǒng)/部件。這部分ISO 16750描述了潛在的環(huán)境應(yīng)力,并規(guī)定了測(cè)試和要求建議用于道路車(chē)輛上/中的特定安裝位置。
2022-12-23 17:15:2816 電子發(fā)燒友網(wǎng)站提供《軟件集成和軌跡預(yù)測(cè)開(kāi)源分享.zip》資料免費(fèi)下載
2023-02-09 11:34:190 運(yùn)動(dòng)控制系統(tǒng)開(kāi)發(fā)與應(yīng)用 運(yùn)動(dòng) 是以 為控制對(duì)象,以控制器為核心,以電力電子、功率變換裝置為執(zhí)行機(jī)構(gòu),在控制理論指導(dǎo)下組成的電氣傳動(dòng)控制系統(tǒng)。運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)
2023-04-21 18:04:19693 電子發(fā)燒友網(wǎng)站提供《車(chē)輛健康監(jiān)測(cè)和預(yù)測(cè)性維護(hù).zip》資料免費(fèi)下載
2023-07-03 14:29:430 近日,由廣汽人工智能首席科學(xué)家陳學(xué)文領(lǐng)銜的純視覺(jué)智駕全棧自研X Lab團(tuán)隊(duì),在國(guó)際權(quán)威的Argoverse 2運(yùn)動(dòng)預(yù)測(cè)挑戰(zhàn)賽中,依靠自主研發(fā)的運(yùn)動(dòng)軌跡預(yù)測(cè)框架XPredFormer,斬獲運(yùn)動(dòng)軌跡預(yù)測(cè)
2023-08-02 14:16:391131 。自動(dòng)駕駛車(chē)輛依賴(lài)實(shí)時(shí)的車(chē)輛狀態(tài)和環(huán)境信息(例如周?chē)?b class="flag-6" style="color: red">車(chē)輛、道路條件)來(lái)獲得確保安全通行的本地軌跡,同時(shí)最小化偏離整體行程軌跡(來(lái)自路徑規(guī)劃的全局軌跡)。本地軌跡規(guī)劃可以定義為實(shí)時(shí)規(guī)劃車(chē)輛從一個(gè)可行狀態(tài)到下一個(gè)可行狀
2023-10-04 18:10:00370 
近日,蘑菇車(chē)聯(lián)提交的軌跡預(yù)測(cè)論文被IEEE Transactions on Intelligent Vehicles(IEEE TIV)?正式錄用。這是蘑菇車(chē)聯(lián)軌跡預(yù)測(cè)算法今年第二次獲得頂級(jí)學(xué)術(shù)期刊
2023-10-13 09:17:53853 電子發(fā)燒友網(wǎng)站提供《太陽(yáng)能光伏玻璃及其薄膜的開(kāi)發(fā)與應(yīng)用(四).pdf》資料免費(fèi)下載
2023-11-03 09:12:300 電子發(fā)燒友網(wǎng)站提供《太陽(yáng)能光伏玻璃及其薄膜的開(kāi)發(fā)與應(yīng)用(一).pdf》資料免費(fèi)下載
2023-11-03 09:18:030 。異步級(jí)聯(lián)可以提高系統(tǒng)的響應(yīng)速度和并行處理的能力。 與同步級(jí)聯(lián)相比,異步級(jí)聯(lián)具有以下幾點(diǎn)區(qū)別: 并行處理能力:異步級(jí)聯(lián)允許模塊在同一時(shí)刻并行執(zhí)行。這樣可以提高系統(tǒng)的性能,并使系統(tǒng)能夠同時(shí)處理多個(gè)任務(wù)。 響應(yīng)速
2024-02-22 13:40:59174
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論