 電子發燒友App
電子發燒友App


電子駐車制動系統(Electronic Parking Brake, EPB)作為一項汽車底盤安全配置,被越來越多的駕駛者所認可。EPB相對機械手剎,具有以下明顯優勢:首先EPB對于駕駛者更加友好,不僅能在擁堵的城市道路解放因頻繁駐車帶來的煩惱,而且可以輔助駕駛者坡道平穩起步,消除因溜坡帶來的安全隱患;其次EPB 與電動平臺具有更好的契合度,能與電控的剎車防抱死系統(Anti-lock Brake System, ABS)/車身電子穩定控制系統(Electronic Stability Controller, ESC)協同,實現 EPB 的緊急制動、AutoHold 等功能;最后隨著車輛自動駕駛技術的快速發展,EPB已經具有線控駐車的執行層,已經可以擴展全自動泊車輔助系統(Auto Parking Assist, APA)、代客泊車(Automated Valet Parking, AVP)等功能,使智能駕駛成為可能。
以前由于EPB成本和技術成熟度原因,在商用車型上應用較少,但是隨著EPB在乘用車的普遍配置,同時商用車駕駛人員的年輕化和商用車行業的快速發展,EPB在商用車輛上也開始迅速發展。本文基于此種情況,以某N2類總質量4.5 t采用液壓制動新能源商用車為例,該車型采用同軸式電驅動橋,駐車制動采用行、駐一體制動器,操縱系統采用EPB,對EPB開發過程的各個階段進行介紹,從而給從業人員帶來一種新的開發思路。
1 功能安全 ?
EPB作為一項底盤功能安全配置,其熄火自動駐車、坡道起步功能只是其基本配置,在實際的開發過程中要考慮到多項使用場景,例如:車輛移動時意外斷電、車輛維修等。面對不同使用場景需要設置對應控制策略。
1.1 靜態駐車功能及判斷信號 ? ?
靜態駐車功能指車輛點火信號打開,車輛處于靜止狀態,手動拉EPB開關,執行駐車制動。判斷靜態駐車模式信號為ABS輪速有效性信號。
車輛熄火自動駐車功能指車輛靜止時,點火鑰匙轉至ACC位置后,自動執行駐車制動(無需拉EPB開關)。判斷自動駐車模式信號:(1)ABS輪速有效性信號;(2)點火IGN+(Ignition)信號(包括硬線及控制器局域網絡(Controller Area Network, CAN)線上報文)。
外部請求接口命令功能指可以響應其他控制模塊的駐車命令,實現AUTO HOLD或起停功能。
1.2 靜態釋放功能及判斷信號 ? ?
靜態釋放功能指IGN ON時,踩下制動踏板,手動按EPB開關,釋放駐車制動。判斷靜態釋放模式信號:(1)制動踏板有效性信號;(2)IGN+信號(包括硬線及CAN線上報文)。
起步自動釋放功能指車輛上電狀態,擋位在前進或后退擋,駕駛員在座位上,車輛起步時,自動松開駐車制動,并根據坡度大小進行智能調整,以防溜坡。判斷起步自動釋放模式信號:(1)電機運行狀態、轉速信號和扭矩信號及有效性信號;(2)油門踏板、擋位及駕駛員側門開關信號及有效性信號。
失效釋放功能指車輛在制動踏板和油門信號都失效情況下,EPB駐車狀態,長按EPB釋放開關5 s,駐車釋放。判斷失效釋放模式信號:(1)制動踏板、油門信號及有效性信號;(2)IGN+信號(包括硬線及CAN線上報文)。
維修釋放功能指車輛在靜止時,EPB進入完全釋放狀態,長按EPB釋放開關10 s~15 s,松開EPB開關,3 s內按下EPB開關,EPB執行釋放到底動作,用于制動系統更換維修。判斷維修釋放模式信號為ABS輪速有效性信號。
1.3 動態駐車功能及判斷信號 ? ?
動態駐車功能指在車輛行進中,拉住EPB開關不放,EPB可以通過駐車制動進行減速,且具有后輪防抱死的功能,使車輛保持穩定的減速,高附路面減速度大于0.2g。判斷動態駐車模式信號:(1)ABS輪速有效性信號;(2)ABS工作狀態有效性信號;(3)點亮后尾燈請求信號。
1.4 自動駐車關閉功能及判斷信號 ? ?
自動駐車關閉功能按下EPB開關保持3 s內熄火,可以臨時關閉自動駐車功能。判斷自動駐車關閉信號為IGN+信號(包括硬線及CAN線上報文)。
2 技術路線 ?
目前市場上主流的EPB系統分為拉索式電子駐車制動系統和集成式電子駐車制動系統。
2.1 拉索式電子駐車系統 ? ?
拉索式電子駐車制動系統屬于手剎制動的改進版,使用電機轉動代替人力操縱駐車手柄,利用電機的正反轉控制駐車拉索行程的變化,從而進行駐車和釋放,其整體機構則與手剎基本相同。如圖1所示。
當車輛駐車時,電機正轉,通過雙級齒輪減速機構進行駐車力矩的增加,再通過絲杠螺母機構,將電機的旋轉運動轉化為絲杠的直線運動,從而拉動駐車拉索。當絲杠上的拉力傳感器達到設定的閥值時,電機停止轉動,車輛保持駐車。如果此時整車出現意外斷電情況,因絲杠螺母機構具有自鎖功能,則會保持當前駐車狀態。
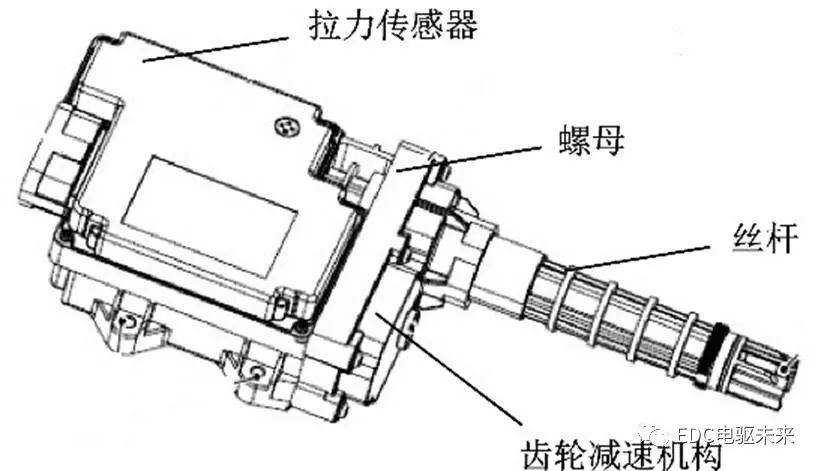
圖1 拉索式EPB結構圖
當駐車釋放時,電機反轉,通過減速齒輪和絲杠螺母機構帶動駐車拉索釋放,當達到設定的釋放拉索行程時,電機停止轉動。
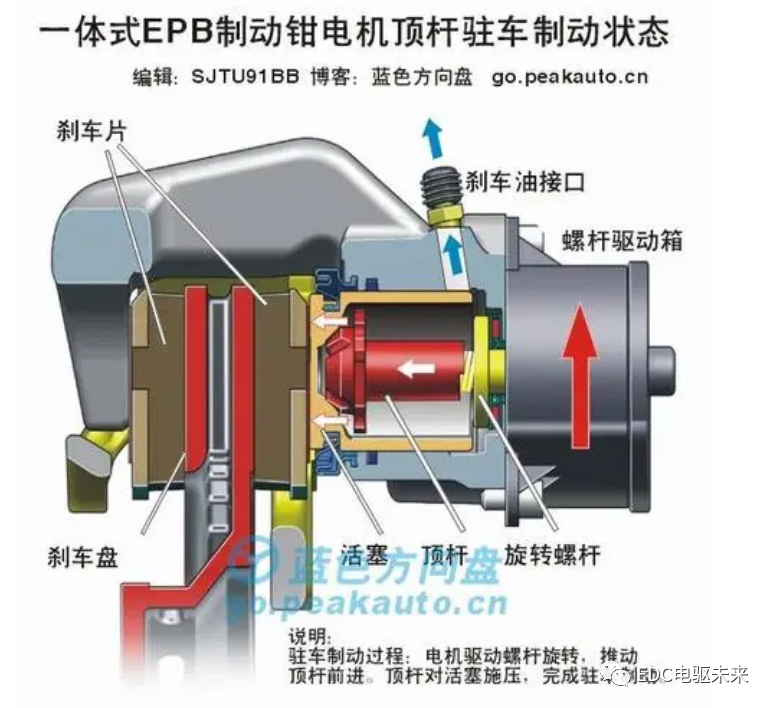
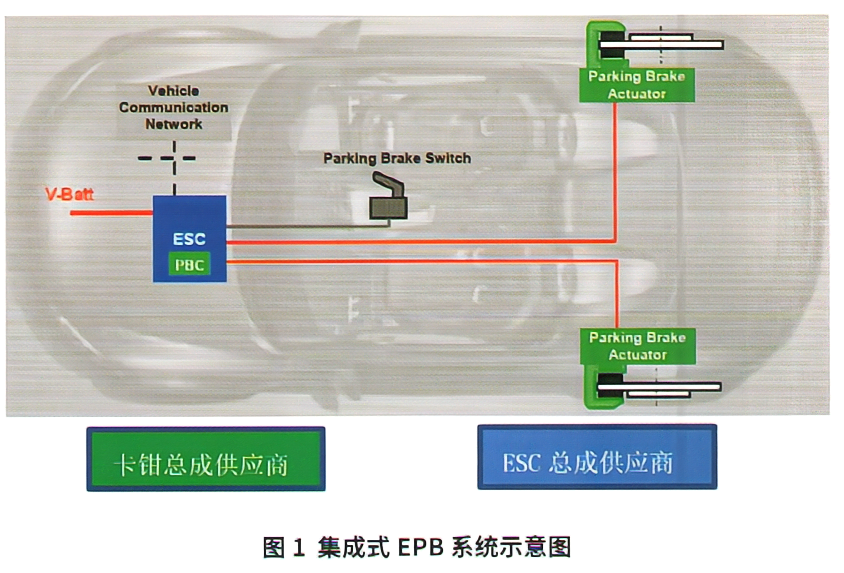
2.2 集成式電子駐車系統 ? ?
集成式電子駐車制動系統主要由四部分構成:電機、減速機構、絲杠螺母和制動器[5]。如圖2所示。
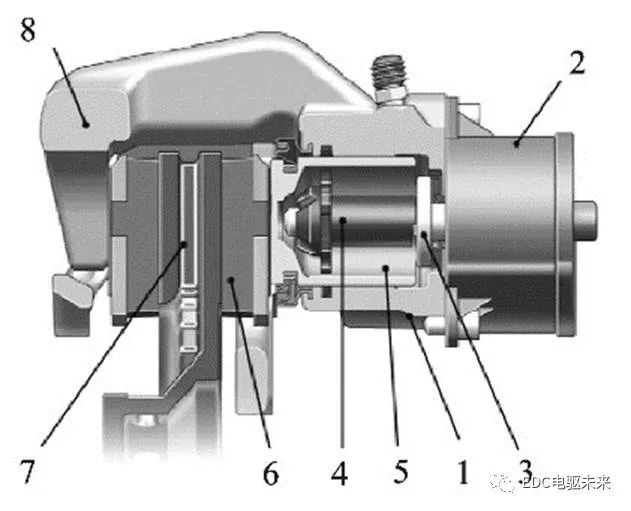
1—制動電機;2—減速增力機構;3—絲杠螺母機構的滑動絲杠;4—絲杠螺母機構的螺母;5—制動活塞;6—摩擦塊;7—摩擦盤;8—制動卡鉗。
圖2 集成式EPB結構圖
駐車制動時,電機輸出力矩傳遞到減速機構,減速機構則將傳導的力驅動絲杠螺母機構的心軸旋轉,推動壓力螺母直線運動,從而作用到制動活塞上,制動活塞再推動右制動蹄片擠壓制動盤,達到駐車制動效果。
2.3 EPB結構與適用車型對比 ? ?
集成式電子駐車制動器與行車制動器集成,因為布置空間影響,目前駐車電機的輸出力基本最大達到3 kN,多應用于乘用車,以及3.5 t以下皮卡和商務車型。而拉索式電子駐車制動系統布置基本不受空間影響,一般可滿足4.5 t至7 t的車輛駐車需求。本車型因為總質量達到4.5 t,考慮駐車的安全需求,采用拉索式電子駐車系統。
3 數據校核 ?
車輛在坡道上駐車時,需要滿載狀態的車輛能在設計要求的最大坡度上平穩駐車。通常根據整車參數,我們可以得到此車型在上下坡時所能達到的極限坡度,所謂極限坡度指整車在一定坡度上駐車時,即使駐車制動力繼續增加,車輛依然無法在此坡道上駐車。然后根據整車設計開發要求,校核車輛在滿載狀態下能否在設計的最大坡度上平穩駐車。
式(1)為車輛所能達到的極限上坡坡度計算公式;式(2)為車輛所能達到的極限下坡坡度計算公式[1]。
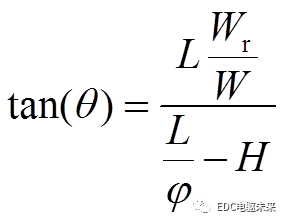
(1)
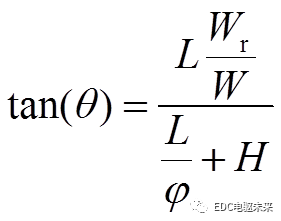
(2)
式中,θ為坡道角度;L為車輛軸距;Wr為后軸質量;W為車輛總質量;H為車輛質心高度;φ為附著系數。
以某車型計算為例,表1為車輛整車參數,表2為車輛所能在上下坡道時駐車的極限坡度。
表1 整車及制動器參數
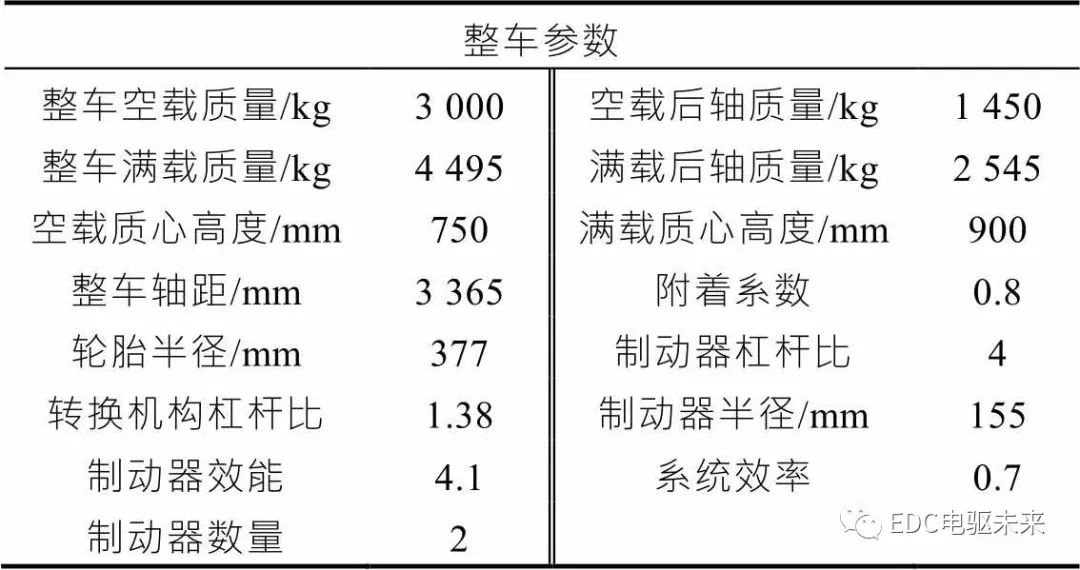
表2 整車空滿載上、下坡極限坡度

整車在滿載狀態設計的最大坡度為30%,小于車輛的極限坡度,因此,校核在各個坡度下EPB的電機輸出力,能否滿足要求。具體如表3所示。
表3 整車滿載狀態在不同坡道需求的EPB電機力
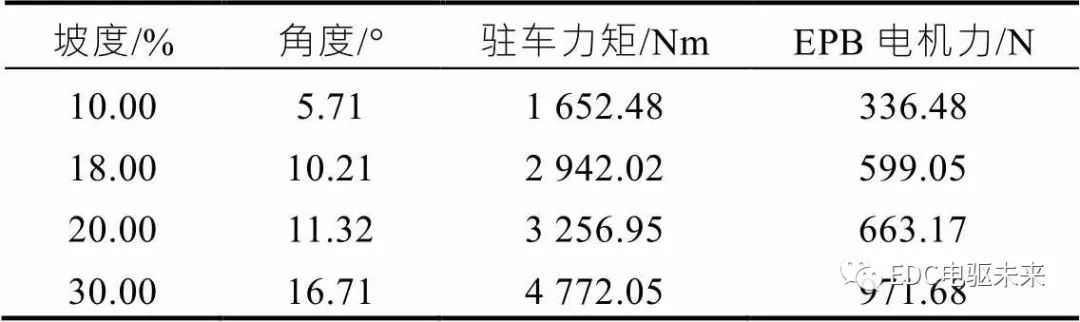
整車在滿載狀態設計的最大坡度為30%,其EPB電機需求輸出力為971 N,而本車型采用的EPB電機輸出力達到1 400 N,完全滿足車型的開發需求。
4 駐車系統布置 ?
駐車制動系統的布置不僅影響駐車的可靠性,同時影響駐車系統拉索的效率和EPB電機輸出力的有效性,從而影響整車駐車效果。
該車型采用輪邊駐車制動器,通過主副拉索將左右駐車制動器連接起來,再通過杠桿機構,將主拉索與EPB電機推桿相連。如圖3所示。

圖3 EPB系統布置圖
EPB輸出拉索與杠桿機構連接臂呈垂直狀態時,EPB的電機輸出力將全部轉化為主拉索的拉力。當EPB輸出拉索與杠桿機構連接臂呈現一個夾角α時,只有部分拉索拉力會轉化為有效輸出力。
F有效=F?sin?α?(3)
根據計算,夾角與垂直狀態偏差5°時,有效輸出力損失0.38%;偏差10°時,有效輸出力損失1.52%。因此,杠桿臂與拉索的夾角應保持在(90±5)°以內。
在駐車制動過程中,EPB初始運動行程為駐車制動器的空行程,隨著制動蹄片與制動鼓接觸,拉索拉力開始變的越來越大,直至車輛完全駐車,拉索拉力達到最大。因此,設置在拉索的終止位置,杠桿臂與拉索的夾角應保持在(90±5)°以內。
在拉索與固定支架的連接處,拉索是通過兩個固定螺母與支架緊固連接,在極端情況下,存在螺栓松動、拉索脫落的風險,一旦拉索脫落,整車駐車系統將失去駐車能力。通過在拉索與支架的連接處設置倒L形卡槽,即使拉索緊固螺母松動,但因為采用此卡槽結構,駐車拉索依然不能脫出,大大增加駐車系統的安全性。如圖4、圖5所示。
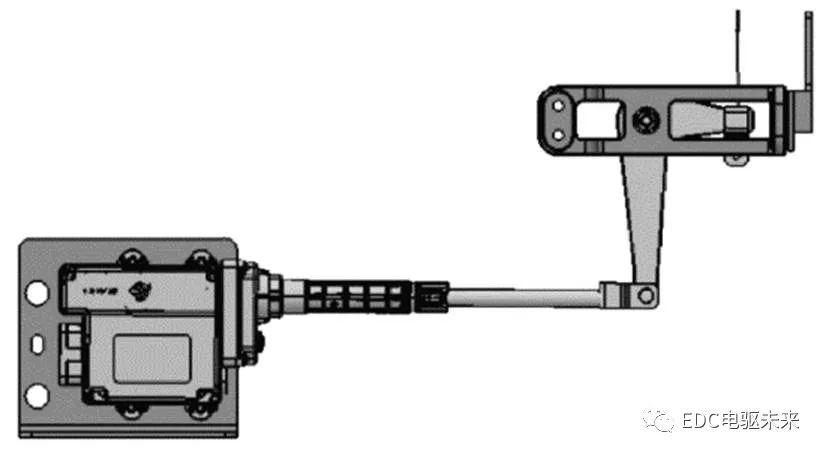
圖4 拉索與杠桿臂簡圖
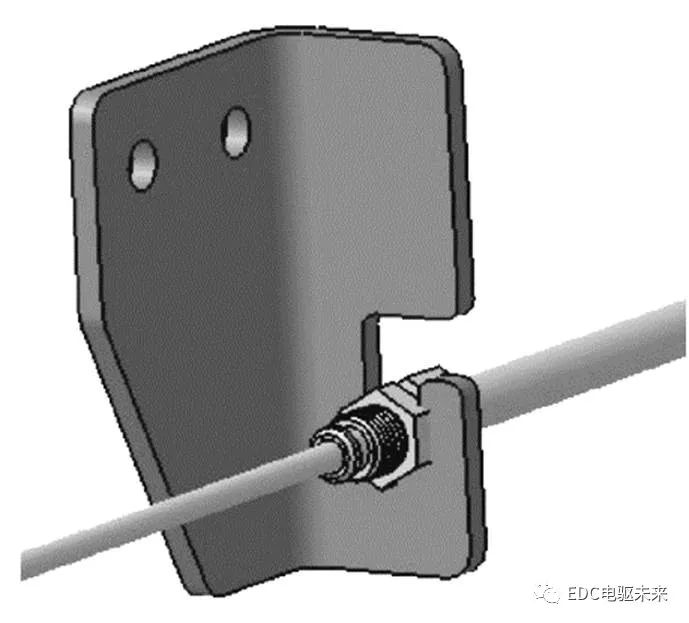
圖5 固定支架倒L行簡圖
5 控制策略 ?
EPB根據使用功能,分為駐車和釋放兩種狀態。根據使用場景則分為靜態駐車、坡度輔助起步、動態駐車、AUTOHOLD和車輛緊急制動。
5.1 駐車與釋放判斷邏輯 ? ?
車輛駐車,一般是車輛保持長久的靜止狀態。而駐車釋放,是車輛從靜止狀態轉變為動態。因此,車輛駐車時,操縱EPB開關即可。而為了防止駐車誤釋放,一般駐車釋放時,不僅要操縱EPB開關,同時要伴隨著有效的剎車信號或油門信號,EPB才會釋放駐車。
EPB在駐車時采用拉力作為判斷信號,在釋放時采用行程做判斷信號,其主要原因在于,車輛駐車時,整車需要達到一定的駐車力矩才能滿足駐車需求,使用拉索拉力作為判斷信號,可以直接施加相應的駐車力矩。而駐車釋放時,因為隨著制動器的磨損,拉索行程會變得越來越長,如果采用駐車力矩作為釋放判斷信號,容易造成駐車釋放不到位,而采用固定行程作為判斷信號,則每次釋放同樣的行程,同車輛初始狀態保持一致。
5.2 靜態駐車 ? ?
靜態模式不僅包含車速為零的情況,同時包含低速的情況。通常會設計一個速度閾值,閾值速度之下的情況屬于靜態模式。閾值通常設置在安全車速以內,一般≤5 km/h,即在這個速度以內車輪抱死,車輛也不會產生危險狀況。
靜態制動的過程是,按下EPB開關,系統通過網絡的車速信號判斷工作模式,若是車速低于5 km/h,執行器以常規方式制動,電機正轉至所需力矩時,按鈕燈和儀表盤指示燈燈亮起,表示已正常駐車。坡道駐車時,會根據角度傳感器提供的信號值計算出當前坡道角度,從而施加相應的力矩。
5.3 坡道輔助功能 ? ?
坡道輔助起步功能在于,車輛需要起步時,只需踩下油門踏板,EPB系統經過分析計算,當電機的起步力矩達到設定的駐車力矩時,即自動解除駐車制動。
車輛在進行EPB坡道起步功能標定時,選取從小到大不同的坡度如:0%坡度,10%坡度,20%坡度,標定此坡度下需求的駐車力矩和起步力矩,當起步力矩達到設定的駐車力矩,無需駕駛員操作EPB按鈕,EPB則釋放駐車。其他坡度采用插值法,即可實現從最小坡度到最大坡度功能的完善[3]。
5.4 動態模式 ? ?
駕駛員按下EPB開關后,若車速高于7 km/h而低于30 km/h,則會按照動態模式進行處理,如果車速高于30 km/h,則會按照緊急制動控制策略處理。EPB在動態模式下,如果駕駛員沒有踩下制動踏板,只拉起EPB開關,則EPB系統判斷駕駛員并沒有駐車意圖,只是誤操作。如果車輛需要動態制動時,則需要踩下制動踏板,同時常拉EPB開關,此時EPB電機會采取輪速信號,在保證2.2 m/s2制動減速度的情況下,同時還要保證車輪不能抱死,此時EPB電機需要不斷的正轉和反轉,即不斷的駐車和釋放。
5.5 AUTO HOLD ? ?
自動駐車(AUTO HOLD)是電子駐車系統的衍生功能,其極大提高了車輛的操縱舒適性和操縱方便性,尤其是針對城市工況的擁堵馬路。其控制關鍵在于對駕駛員的駕駛意圖能夠準確判斷,通過坡度傳感器由控制器給出準確的駐車力,在起步時,駐車控制單元通過油門踏板傳感器等提供的信息通過計算,當驅動力大于行駛阻力時自動釋放駐車制動,從而使汽車能夠平穩起步。AUTO HOLD在觸發時必須同時滿足以下兩個條件:(1)擋位為空擋;(2)車速為靜態模式。
AUTO HOLD功能有兩種實現方式,一種是通過EPB的電機制動,一種是通知ESC模塊進行液壓制動。前者的優點在于控制邏輯簡單,但缺點在于制動的作用時間稍長,噪音稍大,頻繁使用可能降低電機壽命。而ESC模塊通過電機加壓和關閉閥的制動時間通常在100 ms以內,釋放制動力時只需打開相應的閥減壓,閥的開閉時間在100 ms以內。因此,AUTO HOLD功能基本都是通過ESC模塊協同工作實現[4]。
5.6 緊急制動控制策略 ? ?
緊急制動是指車輛在行車制動失效情況下,EPB提供制動力使車輛停下的功能。因為目前車輛上行車制動都是采用雙回路制動,因此,完全失效的概率極低。緊急制動在一般情況下不會觸發,只是作為行車制動的補充功能。當車速高于30 km/h時,駕駛員需要踩下制動踏板,并且常拉EPB開關,EPB則會以最大的輸出力矩進行駐車。因為此時EPB電機以最大負荷工作,可能會造成EPB執行器不可恢復的損傷,從而影響系統的壽命甚至損壞,所以EPB緊急觸發的的頻率應該是極低的,同時所需要的觸發條件也是嚴格的。
EPB依據以下條件判斷當前狀況是否采取緊急制動:(1)車速大于30 km/h;(2)制動踏板達到最大行程;(3)油門踏板行程為零;(4)EPB按鈕一直按下。只有同時滿足四個條件時,EPB則進行緊急制動控制,一旦EPB開關放下,則駐車功能停止。
6 試驗驗證 ?
通過對4.5 t新能源液制動商用車EPB功能的標定,靜態駐車、釋放,動態駐車和自動駐車功能都滿足了設定的功能要求。對于坡度起步功能標定結果,如圖6所示。EPB標定了平地,5%坡度,10%坡度,15%坡度,20%坡度,30%坡度下的駐車力矩和驅動力矩,當驅動力矩大于駐車力矩,EPB自動釋放,整車平穩起步。對于其他的坡度,利用插值法可計算所有坡度下整車需要的駐車力矩和起步驅動力矩。
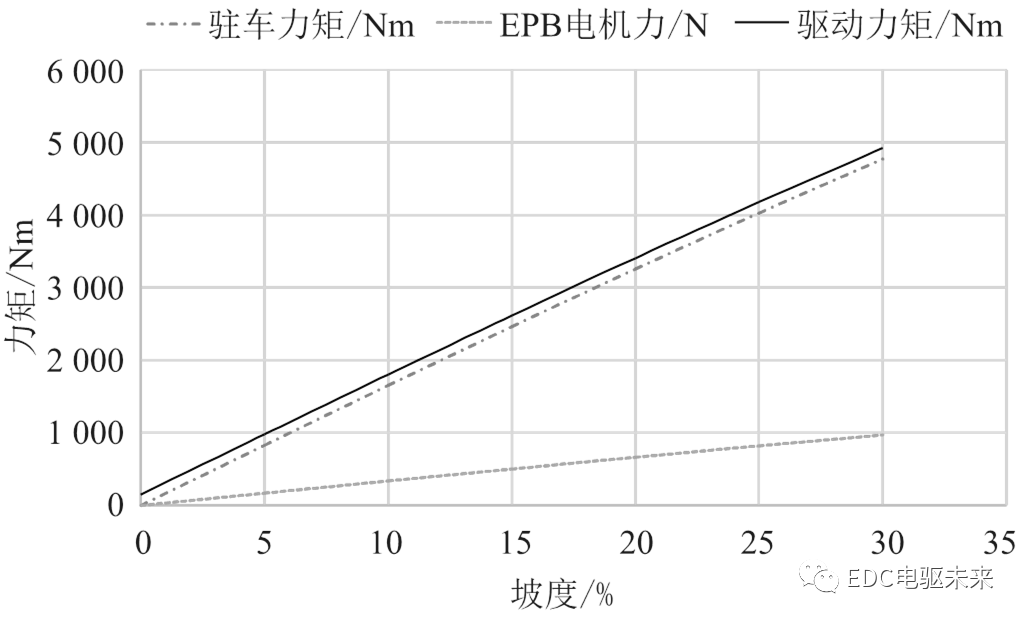
圖6 各坡度下整車駐車力矩和驅動力矩
編輯:黃飛
?










 工商網監
工商網監
評論