 電子發燒友App
電子發燒友App


作為自動駕駛系統的“眼睛”,雷達通過對目標物體發射并接收電磁波,由此獲得目標至電磁波發射點的距離、多普勒頻率、方位角、仰角等信息。相比攝像頭等其他傳感器,雷達幾乎不受天氣與光線的影響,能夠實現全天時、全天候探測,因此也是實現高級別自動駕駛技術的關鍵傳感器。
?
在過去的30年,大部分汽車雷達采用調頻連續波(FMCW)技術,雷達信號處理是在模擬電路中完成的。近幾年隨著自動駕駛技術向更高級別過渡,對汽車雷達的分辨率和準確度提出了更高要求,更為先進的數字編碼調制(DCM)技術受到了關注。在DCM中,信號處理主要以數字方式進行。本文將從多個維度探討DCM 雷達的技術優勢。
?
FMCW 與 DCM 雷達技術
FMCW 和 DCM 雷達的基本區別在于它們傳輸的信號。FMCW 傳輸信號的短脈沖,在其傳輸周期內頻率會增加。在當前的汽車雷達中,FMCW 信號通常占用 50MHz 的帶寬。而DCM 雷達傳輸包含特殊編碼序列的較長脈沖信號,占用 1GHz 至 2GHz 的帶寬。
?
對比度
對比度是指雷達區分兩個近距離目標的能力。也就是說,雷達能夠檢測到并分辨兩個緊密間隔目標之間的反射信號差異。典型的例子是檢測站在汽車旁邊的兒童。相對汽車(強反射物)而言,兒童是弱反射物。
?
雷達發射和接收信號的天線是使用多個輻射元件構建的,具有較少天線元件的雷達具有較寬的主瓣和相對較高的旁瓣,因而對比度較低,無法區分距離很近的兒童和汽車。而具有較多天線元件的雷達,例如 Uhnder 的 DCM 雷達,會產生更窄的天線波束和相對較低的旁瓣(相對于主瓣),從而提供更高的對比度。
?
此外,DCM 雷達的對比度優勢還來自于 DCM 波形。DCM 使用調制到射頻載波相位的擴頻序列,這些擴頻序列具有所謂的“處理增益”。也就是說,當接收信號與發出的信號相關時,接收到的信號會被放大。因此,回波也隨著傳輸的擴頻波形而被放大。這有效提高了雷達檢測小目標(例如兒童)的能力。
?
抗干擾
隨著新車上搭載的雷達數量越來越多,雷達間的信號干擾問題也日益引起重視。想象在兩條車道上往相反方向行駛的兩輛汽車,當它們靠近時,車上雷達發出的信號會相互干擾,從而影響探測目標的能力。基于 DCM 技術的雷達能夠通過以下三種方式解決干擾問題。
?
尺寸
雷達的尺寸很大程度上取決于天線的尺寸(發射和接收元件的數量)、印刷電路板(PCB)上的元件數量和散熱要求。如果雷達消耗的功率更高,則需要更大的散熱器(表面積),雷達尺寸也會更大。
?
我們知道,體積大的雷達很難安裝在車上。為了減小雷達尺寸,一些設計人員考慮使用稀疏陣列來減小天線的尺寸。稀疏陣列具有更少的元件,但也意味著元件需要處理的信號更密集。大多數 FMCW 雷達無法支持這種處理能力,需要外部數字處理器支持,這在一定程度上增加了功耗、尺寸和成本。
?
搭載 Uhnder 芯片的 DCM 雷達外形小巧,從而為 OEM 及雷達供應商在設計傳感方案時提供更大的靈活性。例如,汽車制造商可以并排使用3個超薄 DCM 雷達:使用1個用于短程探測,2個聯合使用可作中程探測,3個聯合使用可作遠程探測。
?
模塊化
模塊化將有助于降低工程開發成本,并簡化供應鏈和制造流程。通過模塊化,制造商可以使用基本的雷達芯片構建短程(SRR)、中程(MRR)、遠程(LRR)和超遠程(SLRR)雷達,并通過軟件編程實現不同的分辨率。
?
實現模塊化有兩種方法。一是將基本雷達芯片與額外的數字處理芯片級聯,以構建更復雜的雷達。使用這種方法能夠優化最簡單且便宜的雷達解決方案,但同時整體成本和功率也會更高。許多 FMCW 雷達都采用這種方法。
?
第二種方法是構建功能更強大的、且支持編程的雷達芯片。使用這種方法,芯片成本會略微增加,但產品的總體擁有成本(TCO)依舊非常具有吸引力。這也是 Uhnder 的DCM 雷達芯片遵循的方法。Uhnder 的DCM 雷達芯片可通過編程選擇發射器與接收器的數量。此外,芯片附帶的可編程軟件堆棧可以幫助制造商降低相關工程開發成本。
?
功率
目前市面上商用的 FMCW 芯片支持 3 或 4 個發射器和 4 個接收器(3x4 或 4x4),而 Uhnder 的 DCM 雷達芯片支持 12 個發射器和 16 個接收器(12x16)。雷達波的波束寬度與發射元件和接收元件數量的乘積成反比,波束越窄,分辨率越高,因此Uhnder的DCM雷達能夠提供更高的分辨率。
?
雖然,3x4 或 4x4 FMCW 雷達芯片可以通過級聯(3 或 4 個芯片)提高分辨率。 但在這種情況下,雷達需要 3-4 個雷達芯片和一個單獨的數字處理器芯片,將各個 FMCW 雷達芯片的輸出有效地組合起來。這意味著這種解決方案總共需要 4 或 5 個芯片,這些芯片還需要更精細的電源子系統,這樣整體配置會比單個 DCM 雷達芯片及其電源消耗更多的功率。
?
關于功率,還存在一個誤解是,由于 DCM 雷達的帶寬較寬,它需要一個復雜的高功率 A/D 轉換器。對一般的A/D 轉換器設計而言確實如此,但Uhnder 使用獨特的交錯式 A/D 轉換器設計,能夠以低功耗提供高動態范圍,并可針對不同的帶寬進行調諧。
?
成本
要實現高分辨率,FMCW 系統往往需要更多的芯片(3-4 個雷達芯片、一個數字處理器芯片和一個更昂貴的電源管理芯片)。此外,這些芯片還需要更復雜的印刷電路板(PCB)布局和更大的 PCB 面積。76-81 GHz 的 PCB 需要特殊材料并且價格昂貴。
?
芯片數量越多,意味著周圍的組件數量越多,例如去耦電容器。而且由于高分辨率 FMCW 系統會消耗更多功率,因此需要更復雜的熱管理系統。也就是說,芯片產生的熱量必須以有效的方式散發。這增加了整體設計的復雜性、尺寸和成本。
?
傳感器融合
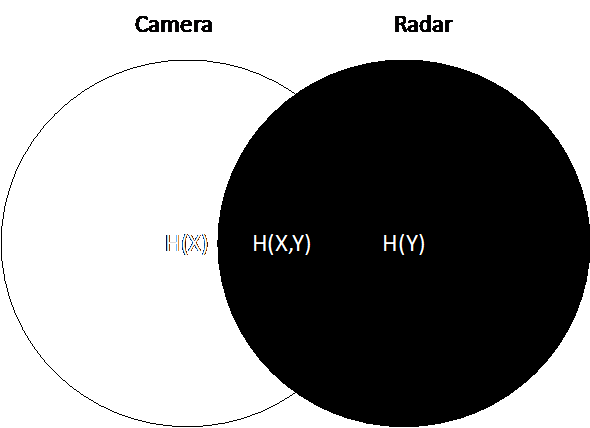
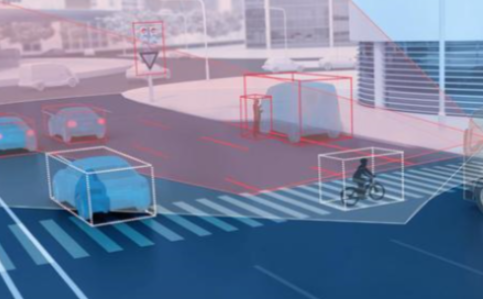
除了雷達以外,攝像頭也是當前車輛 ADAS 系統的重要傳感器。攝像頭擅長識別物體的形狀和顏色,但在惡劣的天氣或黑暗的環境中表現不佳,而雷達則可以全天時、全天候提供場景中目標的距離和速度信息。通過使用深度神經網絡(DNN)等算法融合雷達+攝像頭的信息,能夠進一步提升自動駕駛的安全性能。
?
?
根據信息論,更多的信息可以幫助改進決策。雷達獲取的新信息量(H(Y))取決于雷達的分辨率,而雷達的分辨率又取決于天線元件的數量。在雷達中,發射和接收天線元件的數量就是它的眼睛。 如果雷達有更多的發射和接收天線元件(虛擬通道),就可以看得更遠,并在視場中的不同角度檢測到更多物體。
?
Uhnder 的單個 DCM 雷達芯片提供 192 個虛擬通道,而市場上常見的 FMCW 雷達提供 12 到 16 個虛擬通道。少數較新的 FMCW 雷達有 288 個虛擬接收器,但并未普及。FMCW雷達芯片可以通過級聯提供更多的虛擬通道,有的供應商使用級聯提供 192 到 2300 個通道。不過,DCM 雷達也可以通過級聯四顆芯片來提供 3072 個通道。但聯芯片的時候,雷達系統的復雜性、成本和功耗都會顯著增加。
?
綜上所述,基于 DCM 技術的雷達在對比度、抗干擾性、尺寸、功率和成本等方面具有優勢。此外,由于 DCM 雷達設計支持軟件編程,及其本身的模塊化特性,能夠為當今的汽車設計提供更靈活的解決方案。
?
2015 年成立的 Uhnder 率先將 DCM 技術引入汽車雷達,并成功開發了首款車規級 4D 數字成像雷達芯片及相關軟件,為自動駕駛技術提供更精確的數字感知。2018年,麥格納(Magna)采用 Uhnder 的雷達芯片推出了 ICON 數字雷達,并于2021年宣布電動汽車制造商菲斯克(Fisker)的Ocean SUV將搭載這款數字雷達。此外,Uhnder 還與黑芝麻智能、歐菲光、復睿智行等眾多領先的企業建立合作關系,共同推動基于 DCM 技術雷達產品的應用,助力自動駕駛安全。
?
?
在過去的30年,大部分汽車雷達采用調頻連續波(FMCW)技術,雷達信號處理是在模擬電路中完成的。近幾年隨著自動駕駛技術向更高級別過渡,對汽車雷達的分辨率和準確度提出了更高要求,更為先進的數字編碼調制(DCM)技術受到了關注。在DCM中,信號處理主要以數字方式進行。本文將從多個維度探討DCM 雷達的技術優勢。
?
FMCW 與 DCM 雷達技術
FMCW 和 DCM 雷達的基本區別在于它們傳輸的信號。FMCW 傳輸信號的短脈沖,在其傳輸周期內頻率會增加。在當前的汽車雷達中,FMCW 信號通常占用 50MHz 的帶寬。而DCM 雷達傳輸包含特殊編碼序列的較長脈沖信號,占用 1GHz 至 2GHz 的帶寬。
?
對比度
對比度是指雷達區分兩個近距離目標的能力。也就是說,雷達能夠檢測到并分辨兩個緊密間隔目標之間的反射信號差異。典型的例子是檢測站在汽車旁邊的兒童。相對汽車(強反射物)而言,兒童是弱反射物。
?
雷達發射和接收信號的天線是使用多個輻射元件構建的,具有較少天線元件的雷達具有較寬的主瓣和相對較高的旁瓣,因而對比度較低,無法區分距離很近的兒童和汽車。而具有較多天線元件的雷達,例如 Uhnder 的 DCM 雷達,會產生更窄的天線波束和相對較低的旁瓣(相對于主瓣),從而提供更高的對比度。
?
此外,DCM 雷達的對比度優勢還來自于 DCM 波形。DCM 使用調制到射頻載波相位的擴頻序列,這些擴頻序列具有所謂的“處理增益”。也就是說,當接收信號與發出的信號相關時,接收到的信號會被放大。因此,回波也隨著傳輸的擴頻波形而被放大。這有效提高了雷達檢測小目標(例如兒童)的能力。
?
抗干擾
隨著新車上搭載的雷達數量越來越多,雷達間的信號干擾問題也日益引起重視。想象在兩條車道上往相反方向行駛的兩輛汽車,當它們靠近時,車上雷達發出的信號會相互干擾,從而影響探測目標的能力。基于 DCM 技術的雷達能夠通過以下三種方式解決干擾問題。
?
- 感應和監測干擾:DCM 雷達可以感應干擾源是來自 FMCW 還是 DCM 雷達的信號,并監測干擾,以減輕或避免干擾。
- 減輕干擾:如果干擾信號在同一頻段,并且與雷達接收回波的時隙重合,DCM雷達可以抑制或減輕這種干擾的影響。 例如,搭載 Uhnder 當前芯片版本的 DCM 雷達可同時減輕多達八個 FMCW 干擾。此外,由于每個 DCM 雷達發射的信號都有獨特的擴頻序列,具有相同序列的信號會被放大,而具有不同序列號的信號會被抑制,從而有助于 DCM 雷達減輕信號干擾。
- 避免干擾:在感應和監測的基礎上,DCM 雷達可以改變其工作頻段或傳輸時隙,以避免與工作在相同時隙和頻段的另一臺雷達發生沖突。
尺寸
雷達的尺寸很大程度上取決于天線的尺寸(發射和接收元件的數量)、印刷電路板(PCB)上的元件數量和散熱要求。如果雷達消耗的功率更高,則需要更大的散熱器(表面積),雷達尺寸也會更大。
?
我們知道,體積大的雷達很難安裝在車上。為了減小雷達尺寸,一些設計人員考慮使用稀疏陣列來減小天線的尺寸。稀疏陣列具有更少的元件,但也意味著元件需要處理的信號更密集。大多數 FMCW 雷達無法支持這種處理能力,需要外部數字處理器支持,這在一定程度上增加了功耗、尺寸和成本。
?
搭載 Uhnder 芯片的 DCM 雷達外形小巧,從而為 OEM 及雷達供應商在設計傳感方案時提供更大的靈活性。例如,汽車制造商可以并排使用3個超薄 DCM 雷達:使用1個用于短程探測,2個聯合使用可作中程探測,3個聯合使用可作遠程探測。
?
模塊化
模塊化將有助于降低工程開發成本,并簡化供應鏈和制造流程。通過模塊化,制造商可以使用基本的雷達芯片構建短程(SRR)、中程(MRR)、遠程(LRR)和超遠程(SLRR)雷達,并通過軟件編程實現不同的分辨率。
?
實現模塊化有兩種方法。一是將基本雷達芯片與額外的數字處理芯片級聯,以構建更復雜的雷達。使用這種方法能夠優化最簡單且便宜的雷達解決方案,但同時整體成本和功率也會更高。許多 FMCW 雷達都采用這種方法。
?
第二種方法是構建功能更強大的、且支持編程的雷達芯片。使用這種方法,芯片成本會略微增加,但產品的總體擁有成本(TCO)依舊非常具有吸引力。這也是 Uhnder 的DCM 雷達芯片遵循的方法。Uhnder 的DCM 雷達芯片可通過編程選擇發射器與接收器的數量。此外,芯片附帶的可編程軟件堆棧可以幫助制造商降低相關工程開發成本。
?
功率
目前市面上商用的 FMCW 芯片支持 3 或 4 個發射器和 4 個接收器(3x4 或 4x4),而 Uhnder 的 DCM 雷達芯片支持 12 個發射器和 16 個接收器(12x16)。雷達波的波束寬度與發射元件和接收元件數量的乘積成反比,波束越窄,分辨率越高,因此Uhnder的DCM雷達能夠提供更高的分辨率。
?
雖然,3x4 或 4x4 FMCW 雷達芯片可以通過級聯(3 或 4 個芯片)提高分辨率。 但在這種情況下,雷達需要 3-4 個雷達芯片和一個單獨的數字處理器芯片,將各個 FMCW 雷達芯片的輸出有效地組合起來。這意味著這種解決方案總共需要 4 或 5 個芯片,這些芯片還需要更精細的電源子系統,這樣整體配置會比單個 DCM 雷達芯片及其電源消耗更多的功率。
?
關于功率,還存在一個誤解是,由于 DCM 雷達的帶寬較寬,它需要一個復雜的高功率 A/D 轉換器。對一般的A/D 轉換器設計而言確實如此,但Uhnder 使用獨特的交錯式 A/D 轉換器設計,能夠以低功耗提供高動態范圍,并可針對不同的帶寬進行調諧。
?
成本
要實現高分辨率,FMCW 系統往往需要更多的芯片(3-4 個雷達芯片、一個數字處理器芯片和一個更昂貴的電源管理芯片)。此外,這些芯片還需要更復雜的印刷電路板(PCB)布局和更大的 PCB 面積。76-81 GHz 的 PCB 需要特殊材料并且價格昂貴。
?
芯片數量越多,意味著周圍的組件數量越多,例如去耦電容器。而且由于高分辨率 FMCW 系統會消耗更多功率,因此需要更復雜的熱管理系統。也就是說,芯片產生的熱量必須以有效的方式散發。這增加了整體設計的復雜性、尺寸和成本。
?
傳感器融合
除了雷達以外,攝像頭也是當前車輛 ADAS 系統的重要傳感器。攝像頭擅長識別物體的形狀和顏色,但在惡劣的天氣或黑暗的環境中表現不佳,而雷達則可以全天時、全天候提供場景中目標的距離和速度信息。通過使用深度神經網絡(DNN)等算法融合雷達+攝像頭的信息,能夠進一步提升自動駕駛的安全性能。
?
?
根據信息論,更多的信息可以幫助改進決策。雷達獲取的新信息量(H(Y))取決于雷達的分辨率,而雷達的分辨率又取決于天線元件的數量。在雷達中,發射和接收天線元件的數量就是它的眼睛。 如果雷達有更多的發射和接收天線元件(虛擬通道),就可以看得更遠,并在視場中的不同角度檢測到更多物體。
?
Uhnder 的單個 DCM 雷達芯片提供 192 個虛擬通道,而市場上常見的 FMCW 雷達提供 12 到 16 個虛擬通道。少數較新的 FMCW 雷達有 288 個虛擬接收器,但并未普及。FMCW雷達芯片可以通過級聯提供更多的虛擬通道,有的供應商使用級聯提供 192 到 2300 個通道。不過,DCM 雷達也可以通過級聯四顆芯片來提供 3072 個通道。但聯芯片的時候,雷達系統的復雜性、成本和功耗都會顯著增加。
?
綜上所述,基于 DCM 技術的雷達在對比度、抗干擾性、尺寸、功率和成本等方面具有優勢。此外,由于 DCM 雷達設計支持軟件編程,及其本身的模塊化特性,能夠為
?
2015 年成立的 Uhnder 率先將 DCM 技術引入汽車雷達,并成功開發了首款車規級 4D 數字成像雷達芯片及相關軟件,為自動駕駛技術提供更精確的數字感知。2018年,麥格納(Magna)采用 Uhnder 的雷達芯片推出了 ICON 數字雷達,并于2021年宣布電動汽車制造商菲斯克(Fisker)的Ocean SUV將搭載這款數字雷達。此外,Uhnder 還與黑芝麻智能、歐菲光、復睿智行等眾多領先的企業建立合作關系,共同推動基于 DCM 技術雷達產品的應用,助力自動駕駛安全。
?












 工商網監
工商網監
評論