 電子發(fā)燒友App
電子發(fā)燒友App


我們都知道無(wú)人駕駛是汽車發(fā)展的未來(lái)。但是完全無(wú)人駕駛究竟何時(shí)才能實(shí)現(xiàn),業(yè)界一直眾說(shuō)紛紜。然而在現(xiàn)實(shí)完全無(wú)人駕駛的道路上,高級(jí)駕駛輔助系統(tǒng)(ADAS)就成為了在現(xiàn)今技術(shù)及政策法規(guī)條件下的一個(gè)不錯(cuò)的選擇。同時(shí),很多ADAS功能已經(jīng)大規(guī)模量產(chǎn),不僅給汽車制造商提供更多差異化的產(chǎn)品設(shè)計(jì)選擇,也為普通的消費(fèi)者提供了更好的駕駛體驗(yàn)和安全保障。
高級(jí)駕駛輔助系統(tǒng)(Advanced Driving Assistance System)是利用安裝在車上的各式各樣傳感器(毫米波雷達(dá)、激光雷達(dá)、單雙目攝像頭以及衛(wèi)星導(dǎo)航),在汽車行駛過(guò)程中隨時(shí)來(lái)感應(yīng)周圍的環(huán)境,收集數(shù)據(jù),進(jìn)行靜態(tài)、動(dòng)態(tài)物體的辨識(shí)、偵測(cè)與追蹤,并結(jié)合導(dǎo)航地圖數(shù)據(jù),進(jìn)行系統(tǒng)的運(yùn)算與分析,從而預(yù)先讓駕駛者察覺(jué)到可能發(fā)生的危險(xiǎn),有效增加汽車駕駛的舒適性和安全性。?
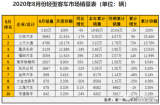
近年來(lái)ADAS市場(chǎng)增長(zhǎng)迅速,原來(lái)這類系統(tǒng)局限于高端市場(chǎng),而現(xiàn)在正在進(jìn)入中端市場(chǎng),與此同時(shí),許多低技術(shù)應(yīng)用在入門(mén)級(jí)乘用車領(lǐng)域更加常見(jiàn),經(jīng)過(guò)改進(jìn)的新型傳感器技術(shù)也在為系統(tǒng)布署創(chuàng)造新的機(jī)會(huì)與策略。
早期的ADAS 技術(shù)主要以被動(dòng)式報(bào)警為主,當(dāng)車輛檢測(cè)到潛在危險(xiǎn)時(shí), 會(huì)發(fā)出警報(bào)提醒駕車者注意異常的車輛或道路情況。而如今的ADAS 技術(shù)來(lái)說(shuō),主動(dòng)式干預(yù)也很常見(jiàn)。
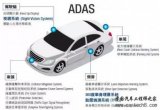
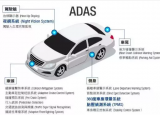
一般,汽車高級(jí)輔助駕駛系統(tǒng)通常包括:車道偏離預(yù)警系統(tǒng)LDWS、車道保持系統(tǒng)LKS、自適應(yīng)巡航系統(tǒng)ACC、前碰撞預(yù)防系統(tǒng)FCW 、自動(dòng)泊車系統(tǒng)APA、盲點(diǎn)監(jiān)測(cè)系統(tǒng)BSD、駕駛員疲勞預(yù)警系統(tǒng)DFM、自適應(yīng)燈光控制ALC、自動(dòng)緊急制動(dòng)AEB、夜視系統(tǒng)NVD等常見(jiàn)功能系統(tǒng)。
除此之外,還包括行人保護(hù)系統(tǒng)、電子警察系統(tǒng)ISA、導(dǎo)航與實(shí)時(shí)交通系統(tǒng)TMC、交通標(biāo)志識(shí)別、下坡控制系統(tǒng)、電動(dòng)汽車報(bào)警系統(tǒng)等等。
? ? ? ? ? ?ADAS常見(jiàn)功能系統(tǒng)
1.車道偏離預(yù)警系統(tǒng)LDWS?????
車道偏離預(yù)警系統(tǒng)LDWS( Lane departure warning system)是指行車中未打轉(zhuǎn)向燈突然大幅度偏離車道,不正常偏移時(shí),行車記錄儀一旦判定行駛路線有異,便會(huì)以行車記錄儀的顯示屏幕提醒駕駛?cè)耍l(fā)出聲響警告對(duì)司機(jī)進(jìn)行警示。這將使司機(jī)可以馬上采取行動(dòng),回到原行車道上。
車道偏離預(yù)警系統(tǒng)主要由HUD抬頭顯示器、攝像頭、控制器以及傳感器組成。當(dāng)車道偏離預(yù)警系統(tǒng)開(kāi)啟時(shí),攝像頭(一般安置在車身側(cè)面或后視鏡位置)會(huì)時(shí)刻采集行駛車道的標(biāo)識(shí)線,通過(guò)圖像處理獲得汽車在當(dāng)前車道中的位置參數(shù)。
當(dāng)檢測(cè)到汽車偏離車道時(shí),傳感器會(huì)及時(shí)收集車輛數(shù)據(jù)和駕駛員的操作狀態(tài),之后由控制器發(fā)出警報(bào)信號(hào),整個(gè)過(guò)程大約在0.5秒完成,為駕駛者提供更多的反應(yīng)時(shí)間。而如果駕駛者打開(kāi)轉(zhuǎn)向燈,正常進(jìn)行變線行駛,那么車道偏離預(yù)警系統(tǒng)不會(huì)做出任何提示。
2.車道保持系統(tǒng)LKS?(Lane Keeping System)
車道保持輔助系統(tǒng)屬于智能駕駛輔助系統(tǒng)中的一種。它可以在車道偏離預(yù)警系統(tǒng)(LDWS)的基礎(chǔ)上對(duì)剎車的控制協(xié)調(diào)裝置進(jìn)行控制。對(duì)車輛行駛時(shí)借助一個(gè)攝像頭識(shí)別行駛車道的標(biāo)識(shí)線將車輛保持在車道上提供支持。可檢測(cè)本車在車道內(nèi)的位置,并可自動(dòng)調(diào)整轉(zhuǎn)向,使本車保持在車道內(nèi)行駛。
如果車輛接近識(shí)別到的標(biāo)記線并可能脫離行駛車道,那么會(huì)通過(guò)方向盤(pán)的振動(dòng),或者是聲音來(lái)提請(qǐng)駕駛員注意,并輕微轉(zhuǎn)動(dòng)方向盤(pán)修正行駛方向,使車輛處于正確的車道上,若方向盤(pán)長(zhǎng)時(shí)間檢測(cè)到無(wú)人主動(dòng)干預(yù),則發(fā)出報(bào)警,用來(lái)提醒駕駛?cè)藛T。
如果車道保持輔助系統(tǒng)識(shí)別到本車道兩側(cè)的標(biāo)記線,那么系統(tǒng)處于待命狀態(tài)。這通過(guò)組合儀表盤(pán)中的綠色指示燈顯示。當(dāng)系統(tǒng)處于待命狀態(tài)下,如果在Y過(guò)標(biāo)記線前打了轉(zhuǎn)向燈,警告信號(hào)就會(huì)被屏蔽,認(rèn)定駕駛員為有意識(shí)的換道。
該系統(tǒng)主要應(yīng)用于結(jié)構(gòu)化的道路上,如高速公路和路面條件較好(車道線清晰)的公路上行駛。當(dāng)車速達(dá)到65km/h或以上才開(kāi)始運(yùn)行。
3.自適應(yīng)巡航系統(tǒng)ACC
自適應(yīng)巡航系統(tǒng)ACC(Adaptive Cruise Control)是一項(xiàng)舒適性的輔助駕駛功能。如果車輛前方暢通,自適應(yīng)巡航(ACC)將保持設(shè)定的最大巡航速度向前行駛。如果檢測(cè)到前方有車輛,自適應(yīng)巡航(ACC) 將根據(jù)需要降低車速,與前車保持基于選定時(shí)間的距離,直到達(dá)到合適的巡航速度。
自適應(yīng)巡航也可稱為主動(dòng)巡航,類似于傳統(tǒng)的定速巡航控制,該系統(tǒng)包括雷達(dá)傳感器、數(shù)字信號(hào)處理器和控制模塊。在自適應(yīng)巡航系統(tǒng)中,系統(tǒng)利用低功率雷達(dá)或紅外線光束得到前車的確切位置,如果發(fā)現(xiàn)前車減速或監(jiān)測(cè)到新目標(biāo),系統(tǒng)就會(huì)發(fā)送執(zhí)行信號(hào)給發(fā)動(dòng)機(jī)或制動(dòng)系統(tǒng)來(lái)降低車速,從而使車輛和前車保持一個(gè)安全的行駛距離。
當(dāng)前方道路障礙清除后又會(huì)加速恢復(fù)到設(shè)定的車速,雷達(dá)系統(tǒng)會(huì)自動(dòng)監(jiān)測(cè)下一個(gè)目標(biāo)。主動(dòng)巡航控制系統(tǒng)代替司機(jī)控制車速,避免了頻繁取消和設(shè)定巡航控制。當(dāng)與前車之間的距離過(guò)小時(shí),ACC控制單元可以通過(guò)與制動(dòng)防抱死系統(tǒng)、發(fā)動(dòng)機(jī)控制系統(tǒng)協(xié)調(diào)動(dòng)作,使車輪適當(dāng)制動(dòng),并使發(fā)動(dòng)機(jī)的輸出功率下降,以使車輛與前方車輛始終保持安全距離。自適應(yīng)巡航系統(tǒng)適合于多種路況,為駕駛者提供了一種更輕松的駕駛方式。
4.前碰撞預(yù)防系統(tǒng)FCW
前碰撞預(yù)防系統(tǒng)FCW (Forward Collision Warning)是通過(guò)雷達(dá)系統(tǒng)來(lái)時(shí)刻監(jiān)測(cè)前方車輛,判斷本車與前車之間的距離、方位及相對(duì)速度,當(dāng)存在潛在碰撞危險(xiǎn)時(shí)對(duì)駕駛者進(jìn)行警告。FCW系統(tǒng)本身不會(huì)采取任何制動(dòng)措施去避免碰撞或控制車輛。
通過(guò)分析傳感器獲取的前方道路信息對(duì)前方車輛進(jìn)行識(shí)別和跟蹤,如果有車輛被識(shí)別出來(lái),則對(duì)前方車距進(jìn)行測(cè)量。同時(shí)利用車速估計(jì),根據(jù)安全車距預(yù)警模型判斷追尾可能,一旦存在追尾危險(xiǎn),便根據(jù)預(yù)警規(guī)則及時(shí)給予駕駛?cè)酥鲃?dòng)預(yù)警。
5.自動(dòng)泊車系統(tǒng)APA
自動(dòng)泊車系統(tǒng)APA(Automatic Parking Assist)是利用車載傳感器(一般為超聲波雷達(dá)或攝像頭)識(shí)別有效的泊車空間,并通過(guò)控制單元控制車輛進(jìn)行泊車。相比于傳統(tǒng)的倒車輔助功能,如倒車影像以及倒車?yán)走_(dá),自動(dòng)泊車的功能智能化程度更高,有效的減輕了駕駛員的倒車?yán)щy。
全自動(dòng)泊車輔助系統(tǒng)APA,通過(guò)控制車輛的加減速度和轉(zhuǎn)向角度自動(dòng)停放車輛。該系統(tǒng)通過(guò)AVM(環(huán)視)和USS(超聲波雷達(dá))感知泊車環(huán)境,使用IMU和車輪傳感器估計(jì)車輛姿態(tài)(位置和行駛方向),并根據(jù)駕駛員的選擇自動(dòng)或手動(dòng)設(shè)置目標(biāo)泊車位。然后系統(tǒng)進(jìn)行自動(dòng)泊車軌跡計(jì)算,并通過(guò)精確的車輛定位與車輛控制系統(tǒng)使車輛沿定義的泊車軌跡進(jìn)行全自動(dòng)泊車,直至到達(dá)最終目標(biāo)泊車位。
6.盲點(diǎn)監(jiān)測(cè)系統(tǒng)BSD
由于汽車后視鏡存在視覺(jué)盲區(qū),變道之前就看不到盲區(qū)的車輛,如果盲區(qū)內(nèi)有超車車輛,此時(shí)變道就會(huì)發(fā)生碰撞事故。在大雨天氣、大霧天氣、夜間光線昏暗,更加難以看清后方車輛,此時(shí)變道就面臨更大的危險(xiǎn),盲點(diǎn)監(jiān)測(cè)系統(tǒng)就是為了解決后視鏡的盲區(qū)而產(chǎn)生的。
盲點(diǎn)監(jiān)測(cè)系統(tǒng)BSD( Blind Spot Detection),是汽車上的一款安全類的高科技配置,主要功能是掃除后視鏡盲區(qū),依賴于車輛尾部?jī)蓚€(gè)雷達(dá)時(shí)刻監(jiān)測(cè)車輛的側(cè)后面和側(cè)面狀態(tài),如果車輛位于該區(qū)域內(nèi),駕駛員將通過(guò)后視鏡上盲點(diǎn)警告指示燈和組合儀表獲得相關(guān)警告提示,避免在車道變換過(guò)程中由于后視鏡盲區(qū)而發(fā)生事故。
7.駕駛員疲勞預(yù)警系統(tǒng)DFM
駕駛員疲勞預(yù)警系統(tǒng)DFM(Driver Fatigue Monitor System)主要是通過(guò)攝像頭獲取的圖像,通過(guò)視覺(jué)跟蹤、目標(biāo)檢測(cè)、動(dòng)作識(shí)別等技術(shù)對(duì)駕駛員的駕駛行為及生理狀態(tài)進(jìn)行檢測(cè),當(dāng)駕駛員發(fā)生疲勞、分心、打電話、抽煙等危險(xiǎn)情況時(shí)在系統(tǒng)設(shè)定時(shí)間內(nèi)報(bào)警以避免事故發(fā)生。DFM系統(tǒng)能有效規(guī)范駕駛員的駕駛行為、大大降低交通事故發(fā)生的幾率。
通過(guò)分析駕駛員的疲勞特征(如打哈欠、閉眼等),對(duì)疲勞行為及時(shí)發(fā)出疲勞駕駛預(yù)警。高精準(zhǔn)度的算法甚至能做到不受時(shí)間段、光照情況、是否戴墨鏡等外界條件影響,始終對(duì)駕駛員的疲勞狀態(tài)進(jìn)行有效管理。當(dāng)駕駛?cè)藛T產(chǎn)生生理疲勞狀態(tài)時(shí),立即發(fā)出預(yù)警警告,及時(shí)喚醒駕駛員,避免嚴(yán)重事故發(fā)生。
8.自適應(yīng)燈光控制ALC
自適應(yīng)燈光控制ALC(Adaptive Light Control)是一種智能燈光調(diào)節(jié)系統(tǒng)。通過(guò)感知駕駛員操作、車輛行駛狀態(tài)、路面變化以及天氣環(huán)境等信息,AFS 自動(dòng)控制前照燈實(shí)時(shí)進(jìn)行上下、左右照明角度的調(diào)整,為駕駛員提供最佳道路照明效果。
自適應(yīng)前照燈系統(tǒng)共由四部分組成:傳感器、ecu、車燈控制系統(tǒng)和前照燈。汽車車速傳感器和方向盤(pán)轉(zhuǎn)角傳感器不斷地把檢測(cè)到的信號(hào)傳遞給ecu,ecu根據(jù)傳感器檢測(cè)到的信號(hào)進(jìn)行處理,把處理完后的數(shù)據(jù)進(jìn)行判斷,輸出前照燈轉(zhuǎn)角指令,使前照燈轉(zhuǎn)過(guò)相應(yīng)的角度。
汽車在轉(zhuǎn)彎時(shí),重點(diǎn)是要提前看到所轉(zhuǎn)方向的障礙物,根據(jù)現(xiàn)實(shí)駕駛的經(jīng)驗(yàn),車燈一般只需轉(zhuǎn)過(guò)o~15°即可,只需要所轉(zhuǎn)方向側(cè)的那只前照燈實(shí)現(xiàn)智能轉(zhuǎn)向就可,另一側(cè)前照燈還是保持原來(lái)的方向。雖簡(jiǎn)化了控制,仍然能夠達(dá)到預(yù)期的效果。它可以通過(guò)控制系統(tǒng)能夠顯著改善各種路況下的照明效果,提高行車安全。
9.自動(dòng)緊急制動(dòng)AEB?
自動(dòng)緊急制動(dòng)AEB(Autonomous Emergency Braking)是一種汽車主動(dòng)安全技術(shù),主要由 3 大模塊構(gòu)成,其中測(cè)距模塊的核心包括微波雷達(dá)、激光雷達(dá)和視頻系統(tǒng)等,它可以提供前方道路安全、準(zhǔn)確、實(shí)時(shí)的圖像和路況信息。
AEB 系統(tǒng)采用雷達(dá)測(cè)出與前車或者障礙物的距離,然后利用數(shù)據(jù)分析模塊將測(cè)出的距離與警報(bào)距離、安全距離進(jìn)行比較,小于警報(bào)距離時(shí)就進(jìn)行警報(bào)提示,而小于安全距離時(shí)即使在駕駛員沒(méi)有來(lái)得及踩制動(dòng)踏板的情況下,AEB 系統(tǒng)也會(huì)啟動(dòng),使汽車自動(dòng)制動(dòng),從而為安全出行保駕護(hù)航。
10.夜視系統(tǒng)NVD
夜視系統(tǒng)NVD(Night Vision Device)是一種源自軍事用途的汽車駕駛輔助系統(tǒng)。在這個(gè)輔助系統(tǒng)的幫助下,駕駛者在夜間或弱光線的駕駛過(guò)程中將獲得更高的預(yù)見(jiàn)能力,它能夠針對(duì)潛在危險(xiǎn)向駕駛者提供更加全面準(zhǔn)確的信息或發(fā)出早期警告。
夜視系統(tǒng)NVD由安置于車前保險(xiǎn)杠的(UFPA)偵測(cè)傳感器和液晶抬頭顯示器(HUD)組成,主要是通過(guò)主動(dòng)式紅外照射、微光夜視技術(shù)以及紅外熱成像技術(shù),來(lái)幫助駕駛者看見(jiàn)以汽車遠(yuǎn)光燈無(wú)法清楚辨識(shí)的物體,駕駛者可將虛擬影像當(dāng)作前方視野的一部分,提升了視線不佳時(shí)的行車安全性。
結(jié)語(yǔ)
目前ADAS系統(tǒng)的主要功能并非是完全控制汽車,而是為駕駛?cè)颂峁┸囕v的工作情形,與車外環(huán)境變化等相關(guān)信息進(jìn)行分析,且預(yù)先警告可能發(fā)生的危險(xiǎn)狀況,讓駕駛?cè)颂嵩绮扇∫驊?yīng)措施,避免交通意外發(fā)生。
至于成為無(wú)人駕駛,當(dāng)然也是ADAS系統(tǒng)目前積極追求的方向,不過(guò)這需在不斷累積使用經(jīng)驗(yàn)與盲點(diǎn)克服后,同時(shí)加入更多主動(dòng)偵測(cè)系統(tǒng),甚至是物聯(lián)網(wǎng)功能后,才有機(jī)會(huì)進(jìn)一步實(shí)現(xiàn)的目的,畢竟自動(dòng)駕駛所需具備的汽車技術(shù)層面更高、更復(fù)雜。
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論