 電子發燒友App
電子發燒友App


10年內無法實現L3/L4級無人駕駛,其中原因包括感知、成本、(高精度地圖)定位、深度學習等多方面因素。高精度定位和高精度地圖是合二為一無法分割的,要利用高精度地圖,首先得清楚自車的高精度定位。雖然現在很多都說重感知,輕地圖,但很多時候,高精度地圖和高精度定位是絕對無法缺少的,比如城市多車道,某些車道只能直行,不能拐彎,而臨近車道可以,再有實線不能變道,雙黃線不能調頭,如果你不知道自己在哪條車道上,自然也就無法做出正確的路徑規劃,這些都要車道級定位和車道級地圖,也就是高精度地圖和高精度定位。
這是個硬規則,換句話說,概率準確度至少要在95%以上,最好不用概率統計法,盡量做到100%準確的物理方法,這是因為,基于視覺參照物體系定位精度的概率在光線變化頻繁的市區,概率或者說置信度估計不會高于60%。基于多星或者多頻算法的定位精度概率一般也只有50%。高精度地圖和高精度定位是L3/L4級無人駕駛必須的,但10年內中美歐的高精度定位都難以實現,日本現在勉強可以實現,但日本對無人駕駛的興趣度很低,日系車一向講究盡量壓縮成本,電子系統不追求先進,能用就行。所以我們看到本田搞了所謂的L3級車,但只有100輛,且只租不賣,豐田也只是在奧運會期間搞輛無人駕駛小巴。
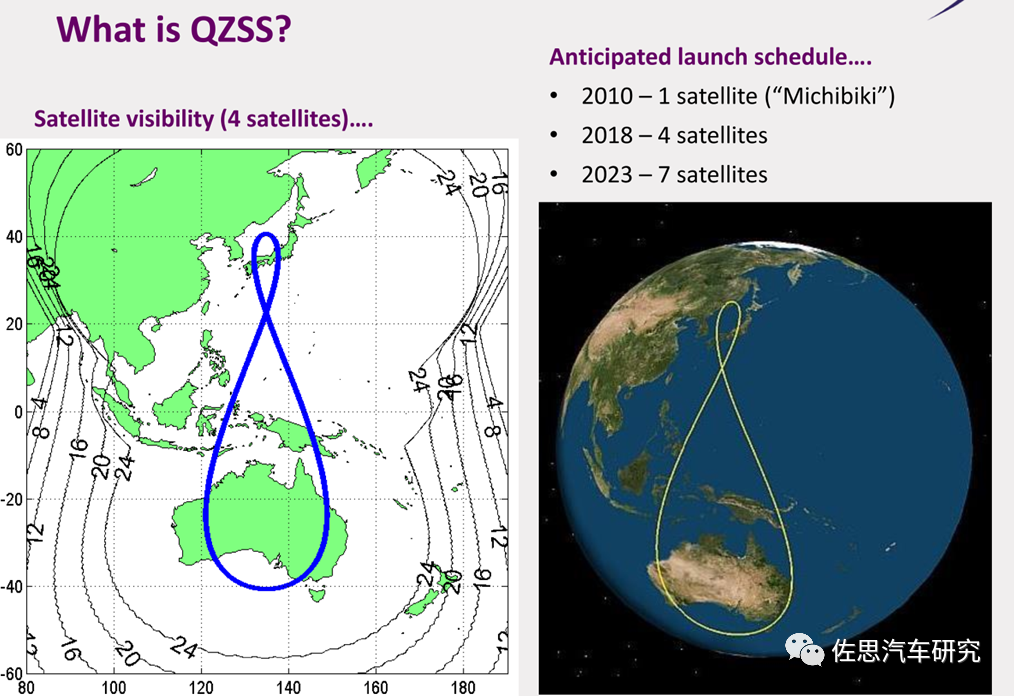
圖片來源:QZSS
日本最初為救災開發的QZSS可以滿足目前無人駕駛所需要的高精度定位,QZSS也覆蓋了澳大利亞中東部地區,早在2010年日本也靠QZSS為澳大利亞中東部地區輸出了無人農業技術。
中國則在2020年開始提供北斗公開服務信號B2b和精密單點定位服務信號PPP-B2b,RNSS服務B2b信號,由北斗三號24顆中圓地球軌道(MEO)衛星和3顆傾斜地球同步軌道(IGSO)衛星在全球范圍內播發,北斗三號RNSS服務信號在原B1I/B3I、B1C/B2a基礎上又添一員,可為用戶提供更多享受RNSS服務信號的選擇。
服務精度方面,B2b信號與其它信號相同,空間信號精度優于0.5米;全球定位精度將優于10米,測速精度優于0.2米/秒,授時精度優于20納秒;亞太地區定位精度將優于5米,測速精度優于0.1米/秒,授時精度優于10納秒。 PPP服務B2b信號,由北斗三號三顆地球同步軌道(GEO)衛星在我國及周邊地區播發,可為用戶提供公開、免費的高精度服務,也是北斗系統首次對外發布的高精度服務信號。
PPP-B2b服務系統示意圖
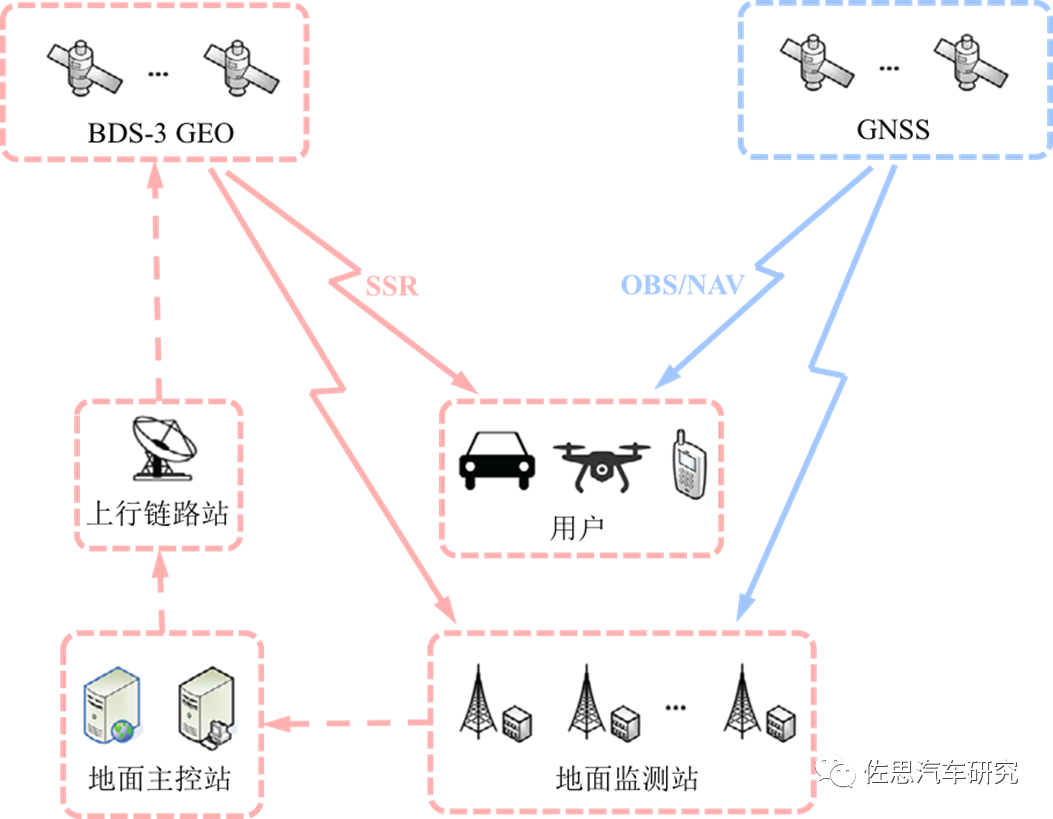
圖片來源:北斗
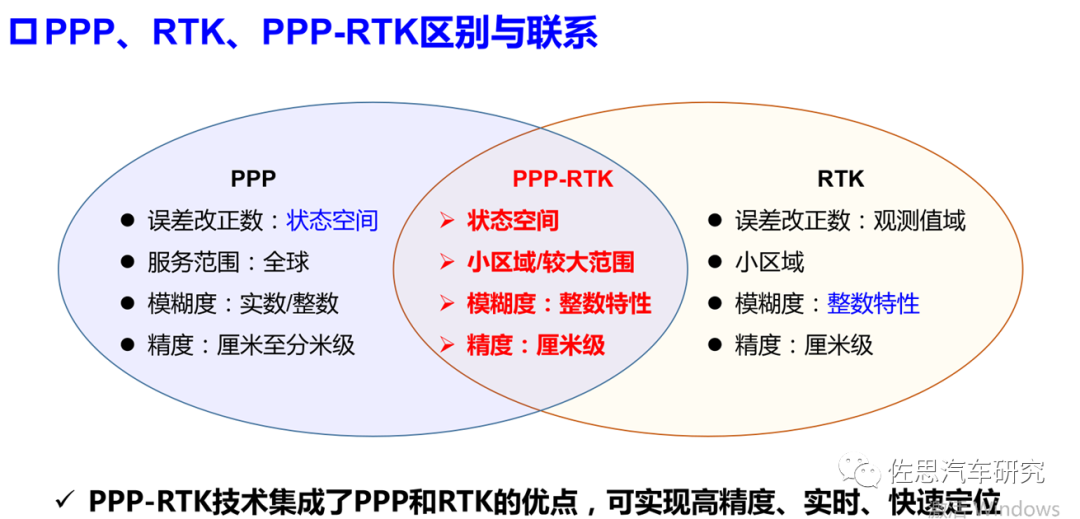
不過北斗三號使用的是PPP技術,即Precise Point Positioning,它使用一臺接收器的非差分載波相位觀測數據進行單點定位,但是其不能使用差分的方式消除誤差,所以利用精密衛星軌道和精密衛星鐘差進行修正,即可以達到厘米級的高精度。
采用北京、三亞、拉薩、且末、上海、西安和昆明站數據進行了BDSBAS的精度評定,結果表明,BDSBAS單頻定位性能滿足國際民航一類精密進近要求,水平定位精度好于2.1m(95%統計精度),高程定位精度好于3.5m(95%統計精度)。

圖片來源:衛星導航國際期刊
這是只使用北斗SBAS的結果,達不到無人駕駛所需要的精度,且各個地區差別較大,精度最高的似乎是上海,南方和北方效果都不太好,所以PPP是必須的。
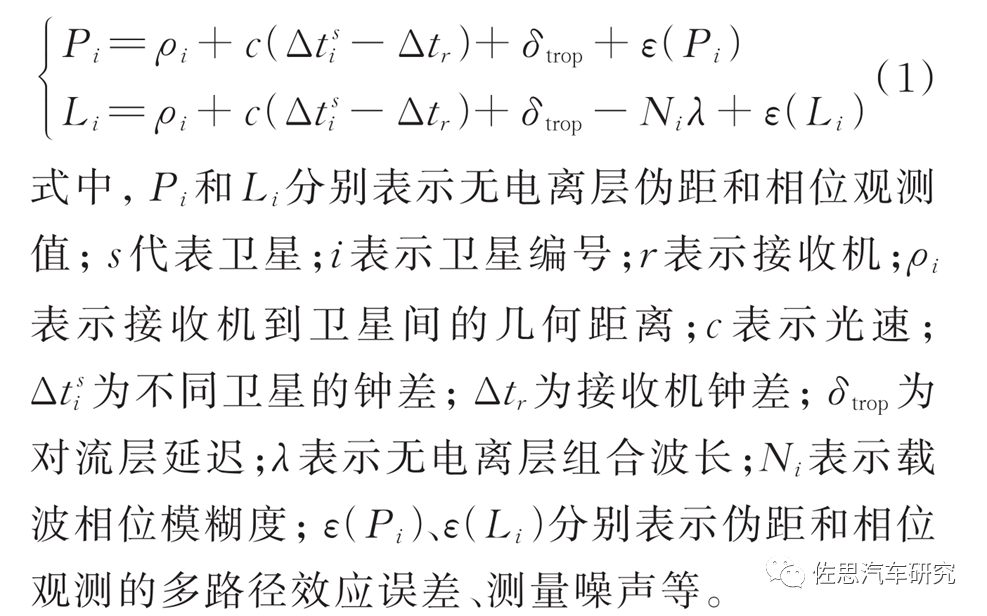
我國PPP采用雙頻偽距和載波的無電離層組合,可以消除電離層一階項影響。偽距和相位無電離層組合觀測方程可表示為:
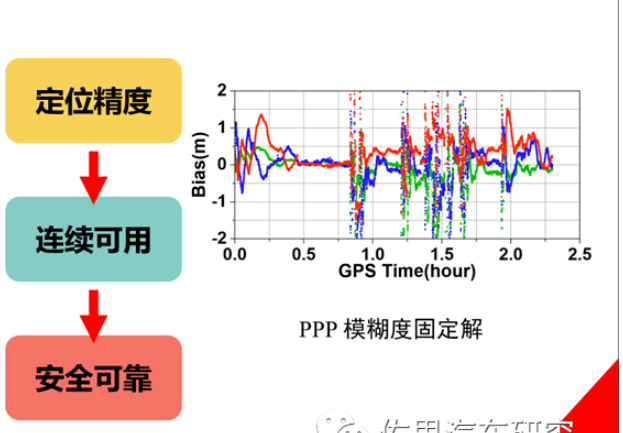
PPP定位對智能駕駛來說有幾個致命缺點,首先是收斂時間,對智能駕駛而言,收斂時間最好在1秒甚至30毫秒以內,速度越高,收斂時間就該越短,不過PPP收斂時間一般是20-30分鐘。
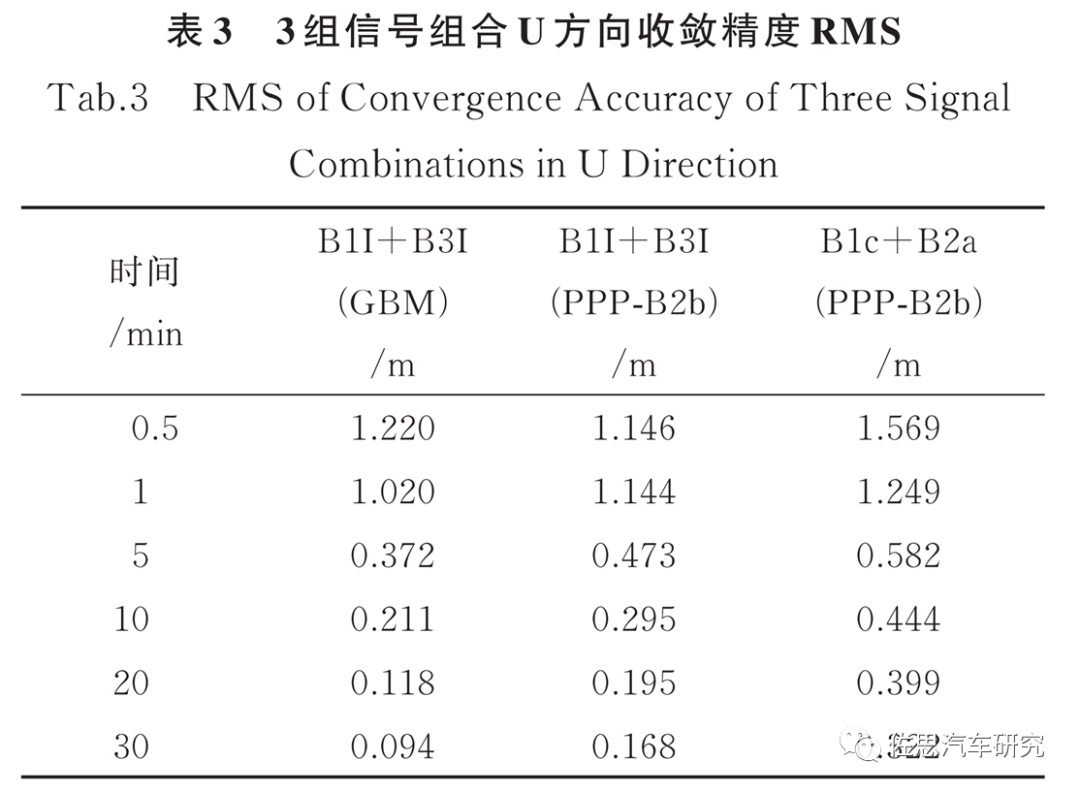
圖片來源:武漢大學學報之《北斗三號 PPP-B2b 服務性能評估》,時間越長精度越高
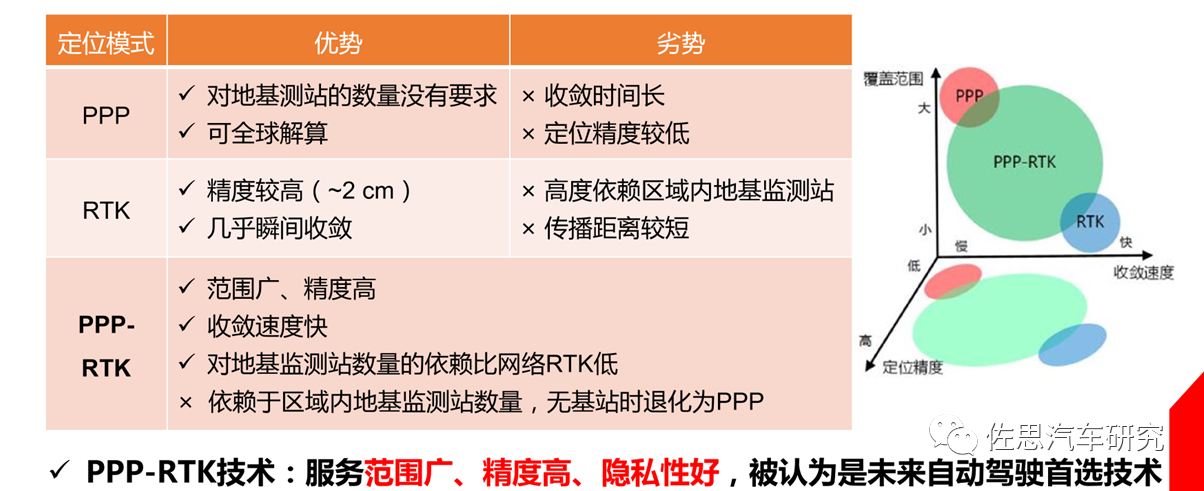
PPP第二個缺點是成本,這需要高精度接收機和天線,價格大約在1~20萬元之間。日本QZSS使用的是PPP-RTK,收斂時間在1秒鐘以內,且成本極低,基本只有軟件成本,無新增硬件成本,做無人駕駛最合適。
圖片來源:《PPP-RTK技術面臨的機遇與挑戰》,張小紅,任曉東,武漢大學測繪學院
圖片來源:《PPP-RTK技術面臨的機遇與挑戰》,張小紅,任曉東,武漢大學測繪學院
日本準天頂衛星系統(QZSS)已率先基于其L6D信號實現了星基PPP-RTK增強服務——CLAS(Centimeter LevelAugmentation Service),數據播發速率2000bps,服務范圍覆蓋日本本土。此外,也有一些商業公司開始提供PPP-RTK服務,例如Trimble公司的CenterPoint RTX服務、NovAtel公司的TerraStar-X服務、Fugro公司的Marinestar G4+服務以及GEO++公司的SSRPOST服務等。雖然上述商業服務或多或少用到(至少借鑒)了PPP-RTK技術,但其電離層延遲模型表達、編碼格式、播發方案等都鮮有公開資料可供參考。
對PPP-RTK來說,最關鍵的是電離層模型。PPP-RTK初始化時間嚴重依賴電離層模型精度。當電離層誤差小于0.5TECU時 ,初始化時間可優于1min。
電離層模型不是那么好做的,特別是在低緯度和高緯度地區,受太陽粒子影響是沒有規律或者短時間內很難總結出規律,很難建立電離層模型。這就是所謂的電離層閃爍。

圖片來源:《PPP-RTK技術面臨的機遇與挑戰》,張小紅,任曉東,武漢大學測繪學院
不過電離層閃爍通常只發生在晚上11點到日出前,這段時間內不適用智能駕駛就行,而這段時間內大部分人都已經睡了。
不過PPP-RTK對于中美這種疆域遼闊的國家來說建設難度頗大,日本狹長的國土只需要4顆低軌道衛星即可覆蓋,中美不大可能為了智能駕駛而發射幾十顆低軌道衛星的。
即便是PPP-RTK也不是萬能的,城市復雜環境,GPS信號丟失是無法避免的,要實現無人駕駛,就少不了高精度的慣性導航系統(INS)。
圖片來源:《PPP-RTK技術面臨的機遇與挑戰》,張小紅,任曉東,武漢大學測繪學院
當GNSS信號遮擋嚴重時,無論PPP或PPP-RTK都只能提供1至2米的定位服務,此時只有采用PPP-RTK/INS協同精密定位,才可實現平面分米級定位。INS精度取決于車輛速度,如果不超過時速60公里,那么2萬元以下的INS應該就可以滿足GPS信號丟失10秒的情景。如果時速120公里,那恐怕需要20萬元以上的INS系統了。
所以還是踏踏實實搞L2+, L2++, L2+++。能做好L2也是相當不容易的,這也是國內企業特別是芯片企業的機會。
編輯:黃飛
?























 工商網監
工商網監
評論