 電子發燒友App
電子發燒友App


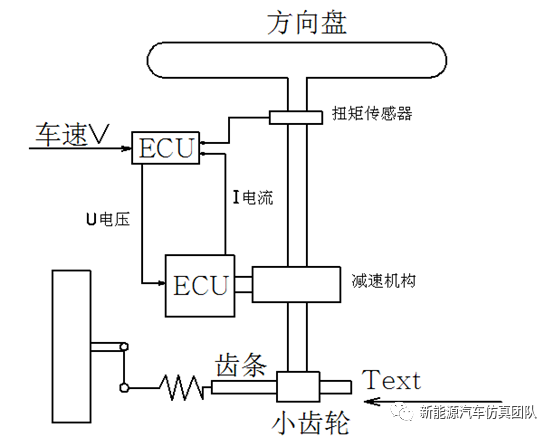
1、工作原理
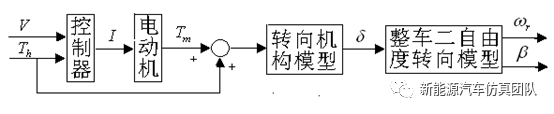
下圖為電動轉向系統結構原理圖:
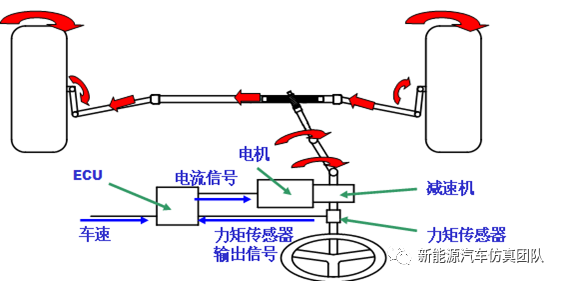
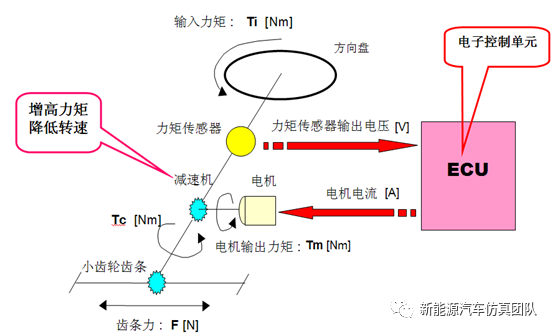
下圖為電動轉向原理圖:
EPS系統的正向輸入系統框圖為:
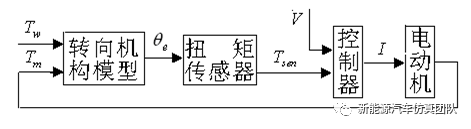
EPS系統的逆向輸入系統框圖為:
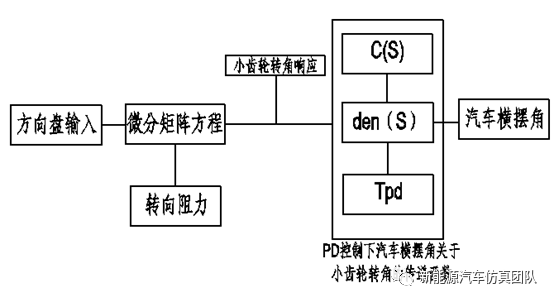
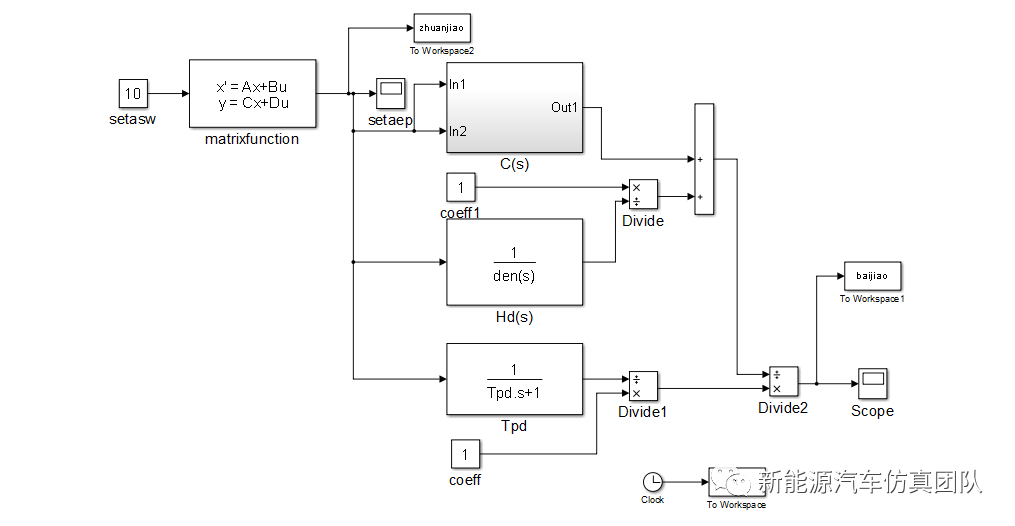
基于Simulink模型整體函數傳遞框圖為:
2、電動助力轉向系統數學模型及參數
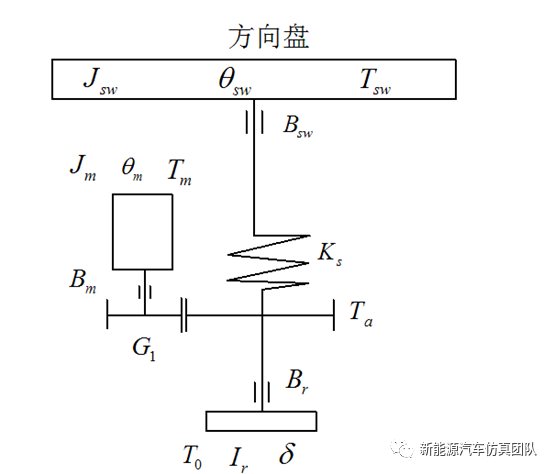
2.1、系統的動力學分析
以方向盤為研究對象建立動力學模型:

以小齒輪為研究對象建立動力學方程:

2.2、電動機模型分析
本系統采用直流電動機為驅動電機,額定電壓為U,電感為L,電樞電阻為R,反電動勢常數為Kb,電動機扭矩系數為Ka,轉速為N,則有如下關系式成立:

當電動機趨于穩定狀態,電感不發生作用,電流穩定時上式可簡化為:

電動機輸出扭矩為:

式中,

G1為電機減速機構傳動比,則電動機作用在轉向系統立柱的助力扭矩為:

以電機為研究對象建立動力學模型:

式中,δ為前輪轉角。
直流電動機有兩種控制策略,比例控制和比例加微分控制(PD)。
若系統采用PD控制器來控制電機,則電機的驅動電壓U為:

2.3、電動助力轉向系統數學模型

式中,T0為轉向阻力矩,Mr為主要由原地轉向阻力矩,Mz為回正力矩,車輪轉向角α,側偏角φ,車速v,行駛的路面,輪胎的類型及其氣壓,車身重量,前軸負荷及各個傳動系統的摩擦力等相關的非線性的函數關系,為簡化分析以下式來表達阻力矩:

上述方程為二元微分方程,為分析其特性建立矩陣方程,令:
據上述可得到矩陣方程:

系統的輸入量為:

可得系統的狀態方程為:
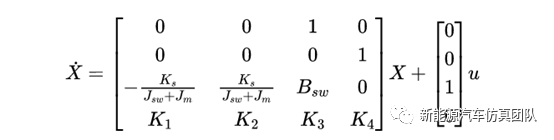
系統的輸出方程為:

線性二自由度汽車模型方程如下:

遞推過程此處簡化,最終可得:
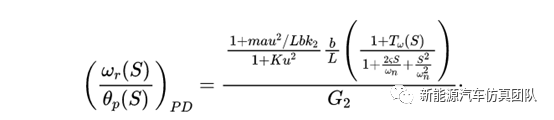

EPS系統的汽車和普通轉向系統的汽車相比較,EPS系統的橫擺角速度穩態增益小于普通轉向系統。同時可以通過修改M文件中的參數值來獲得在不同車速下的增益。
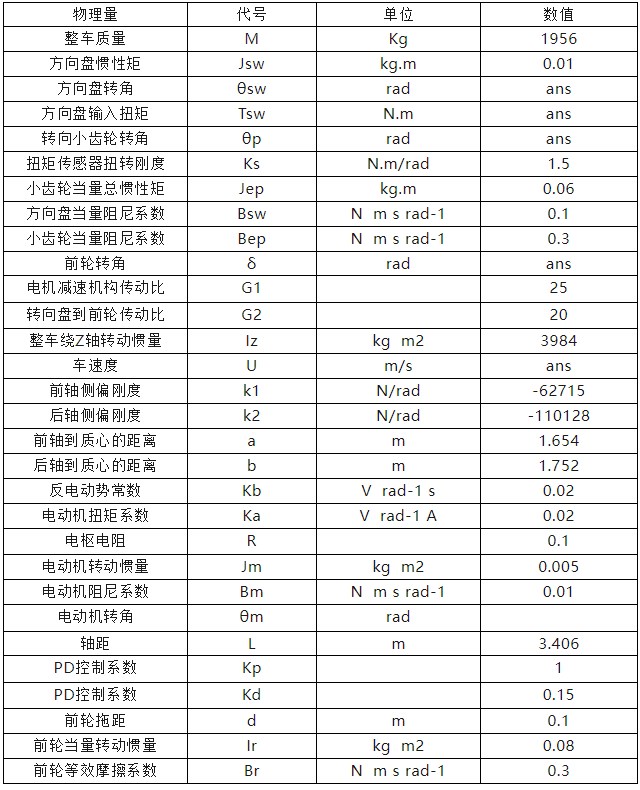
2.4、汽車EPS結構參數
%汽車質心側偏角&橫擺角對前輪轉向角的傳遞函數參量%
%參量設置%
k1=-62715;%前軸側偏剛度%
k2=-110128;%后軸側偏剛度%
m=1956;%整車質量%
a=1.654;%前軸到質心的距離%
b=1.752;%后軸到質心的距離%
Iz=3984;%整車繞Z軸轉動慣量%
L=3.406;%軸距%
u=20;%車速%
d=0.1;%前輪拖距%
R=0.1;%電樞電阻%
Wn=((k1*k2*L*L)/(m*Iz*u*u)+((a*k1-b*k2)/Iz))^(1/2);%汽車轉向響應的固有頻率%
K=m/(L*L)*(a/k2-b/k1);%穩定性因數%
Kv=250;
eta=(-m*(a*a*k1+b*k2)+Iz*(k1+k2))/(2*m*Iz*L*((1+K))^0.5);%汽車轉向響應的阻力比%
Gbeta0=((1+m*a*u*u/(L*b*k2))/(1+K*u*u))*(b/L);%穩態側偏角增益%
Gomiga0=(1/(1+K*u*u))*(u/L);%穩態橫擺角速度增益%
Tbeta=-((Iz*u)/(L*b*k2))*(1/(1+m*a*u*u/(L*b*k2)));%
Tomiga=-m*a*u/(L*b*k2);
Ka=0.02;%電動機扭矩系數%
Kb=0.02;%反電動勢常數%
Ks=1.5'%扭矩傳感器扭轉剛度%
Kp=1;%PD控制系數%
Kd=0.15'%PD控制系數%
Jep=0.06;%小齒輪當量總慣性矩%
Ir=0.08;%前輪當量轉動慣量%
Jm=0.005;%電動機轉動慣量%
G1=20;%電機減速機構傳動比%
G2=20;%轉向盤到前輪傳動比%
Br=0.3;%前輪等效摩擦系數%
Bm=0.01;%電動機阻尼系數%
Bsw=0.1;%方向盤當量阻尼系數%
Bep=0.3;%小齒輪當量阻尼系數%
lamude=1+(Ka*Kp)/R*G1;%助力系數%
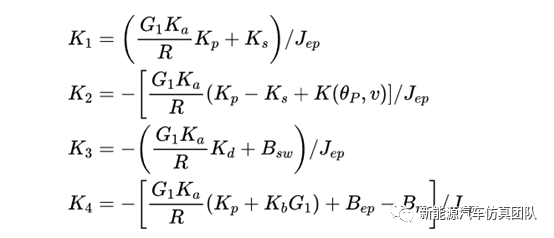
K1=(G1*Ka*Kp/R+Ks)/Jep%矩陣方程系數%
K2=-(G1*Ka/R*(Kp-Ks+Kv))/Jep%矩陣方程系數%
K3=-(G1*Ka/R*Kd+Bsw)/Jep
K4=-(G1*Ka*(Kp+Kb*G1)/R+Bep-Bm)/Jep
mel=G1*Ka*Kd*Ks/R;
Wp=(lamude*Ks/(Ir+Jm*G1^2))^0.5;
Tpd=mel/(lamude*Ks);
setapd=(Br+Bm*G1*G1+Ka*Kb*G1*G1/R+mel)/(2*(lamude*Ks*(Ir+Jm*G1*G1))^0.5);%PD控制器EPS系統阻尼比%