慣性導(dǎo)航系統(tǒng)是一種利用慣性測(cè)量單元(如加速度計(jì)和陀螺儀)來(lái)測(cè)量和跟蹤物體位置、方向和速度的技術(shù)。在無(wú)人駕駛領(lǐng)域,慣性導(dǎo)航系統(tǒng)通常與衛(wèi)星導(dǎo)航系統(tǒng)(如北斗、GPS)結(jié)合使用,以提供更高精度和更可靠的定位
2023-09-11 17:56:10 1275
1275 
作為一款基于MEMS技術(shù)的6-DOF三重冗余高精度慣性測(cè)量單元,OpenIMU330既能提供準(zhǔn)確定位,又能夠通過(guò)冗余架構(gòu)大幅提高產(chǎn)品安全級(jí)別。
2019-09-03 16:19:001467 ,定會(huì)進(jìn)一步得到廣泛使用。作為慣性系統(tǒng)的兩種測(cè)量方式,速率捷聯(lián)技術(shù)會(huì)隨著科學(xué)技術(shù)的不斷進(jìn)步而逐步替代慣性平 臺(tái)技術(shù)。不過(guò),在今后的一段時(shí)期內(nèi),慣性平臺(tái)的高精度和抗嚴(yán)酷環(huán)境條件的能力,速率、捷聯(lián)方式仍難以滿足而不能完全替代它。`
2020-06-23 14:30:56
單元IMU和垂直測(cè)量單元VRU產(chǎn)品特點(diǎn):慣性測(cè)量單元垂直陀螺陀螺儀零偏穩(wěn)定性8°/hr加速度計(jì)零偏穩(wěn)定性0.04mg垂直陀螺儀算法,姿態(tài)精度±0.25°集成高精度壓力計(jì)相比于3DM-GX3-25航姿參考系統(tǒng),3DM-GX3-15缺少了一個(gè)三軸磁力計(jì)。姿態(tài)角當(dāng)中的橫滾和傾斜精度±0.25,航向沒(méi)有參考。
2020-12-07 09:05:45
MS-2163:利用集成式MEMS慣性傳感器改 善工業(yè)控制
2019-09-03 14:31:55
MEMS(Micro-Electro-Mechanical System)是指集機(jī)械元素、微型傳感器以及信號(hào)處理和控制電路、接口電路、通信和電源于一體的完整微型機(jī)電系統(tǒng)。MEMS慣性傳感器可構(gòu)成
2020-05-18 06:28:30
方法來(lái)檢測(cè)位置,利用高性能傳感器和先進(jìn)的算法來(lái)優(yōu)化合并所有隨機(jī)發(fā)射信號(hào)。系統(tǒng)目標(biāo)是達(dá)到米級(jí)精度并生成實(shí)時(shí)路徑圖。工業(yè)級(jí)MEMS慣性傳感器技術(shù)的進(jìn)步支持PLM,完整的系統(tǒng)開(kāi)發(fā)方法既可解決技術(shù)障礙,同時(shí)
2018-10-30 14:52:39
應(yīng)力會(huì)使光器件和光纖之間的對(duì)準(zhǔn)發(fā)生偏移。在高精度加速度計(jì)和陀螺儀中,封裝需要和MEMS芯片隔離以優(yōu)化性能(見(jiàn)圖1)。圖1 常規(guī)晶圓級(jí)封裝(WLP)結(jié)構(gòu)示意圖根據(jù)生產(chǎn)的MEMS器件類型的不同,電子性能
2010-12-29 15:44:12
能力。ADI將其專利的MEMS IP與業(yè)界領(lǐng)先的信號(hào)處理能力相結(jié)合,從而在高性能MEMS領(lǐng)域一枝獨(dú)秀。ADI慣性測(cè)量單元(IMU)解決了復(fù)雜航空電子系統(tǒng)中慣性傳感器的部署難題,此種部署必須依靠尺寸
2018-10-17 09:43:58
。圖1. 慣性MEMS加速度計(jì)的掃描電子顯微鏡(SEM)圖像。多晶硅指懸浮在減壓腔,從而可通過(guò)相鄰信號(hào)調(diào)理電子器件測(cè)量與加速度成正比的運(yùn)動(dòng)和電容。尺寸和重量對(duì)于機(jī)載應(yīng)用,例如健康和使用監(jiān)控系統(tǒng)
2018-10-12 11:01:36
自適應(yīng)擴(kuò)展卡爾曼濾波器為用戶提供高精度的慣性數(shù)據(jù)和定位、速度等信息。是同等級(jí)別產(chǎn)品中體積較小,重量較輕,功耗較低的工業(yè)級(jí)慣性導(dǎo)航系統(tǒng)。3DM-GX5-15慣性測(cè)量單元IMU 和 垂直陀螺VRU產(chǎn)品特點(diǎn)
2020-12-07 09:06:55
對(duì)汽車(chē)載體進(jìn)行高精度定位、測(cè)速和測(cè)姿,與市場(chǎng)上現(xiàn)有的相關(guān)產(chǎn)品相比,性能得到了較大地提升。(2)車(chē)輛姿態(tài)角SKM-4DX慣性導(dǎo)航模塊利用多年對(duì)MEMS慣性器件的研究經(jīng)驗(yàn),通過(guò)自適應(yīng)濾波算法實(shí)現(xiàn)了對(duì)陀螺儀
2020-08-13 01:29:45
泵,并使心臟搭橋移植和人工細(xì)胞組織成為現(xiàn)實(shí)中可實(shí)際使用的治療方式;在可穿戴應(yīng)用中,MEMS傳感器可實(shí)現(xiàn)運(yùn)動(dòng)追蹤、心跳速率測(cè)量等。汽車(chē)電子MEMS傳感器的應(yīng)用汽車(chē)電子產(chǎn)業(yè)被認(rèn)為是MEMS傳感器的第一波
2016-12-07 15:42:36
高精度壓力測(cè)量電路
2013-03-11 20:01:27
ALLYSTAR 北斗高精度定位終端是一款支持 5G 通訊、集 GNSS 導(dǎo)航技術(shù)、慣性傳感技術(shù)于一體的車(chē)載智能終端。基于華大北斗自研的全系統(tǒng)多頻低功耗高精度 GNSS 芯片,結(jié)合高精度 GNSS
2023-09-08 14:29:58
超高性能產(chǎn)品。新產(chǎn)品非常適合那些對(duì)高精度、重復(fù)性和耐用性要求極高的應(yīng)用。”意法半導(dǎo)體副總裁,MEMS傳感器產(chǎn)品部總經(jīng)理Andrea Onetti表示,“我們將在未來(lái)幾個(gè)月持續(xù)推出新型的工業(yè)級(jí)精密傳感器
2018-05-28 10:23:37
數(shù)據(jù)。 作為國(guó)內(nèi)第一家量產(chǎn)手機(jī)用高精度數(shù)字氣壓傳感器廠商的深圳市惠貽華普電子有限公司日前宣布推出一款小體積、高精度的智能數(shù)字傳感器--HP203B.該器件性能卓越,適合智能的高精度測(cè)量和數(shù)
2018-11-06 15:08:02
交流小信號(hào)怎么高精度測(cè)量
2022-05-11 12:01:02
) :代替駕駛員進(jìn)行控制層的電子驅(qū)動(dòng),對(duì)車(chē)輛進(jìn)行控制
高精度地圖與自動(dòng)駕駛汽車(chē)
關(guān)于自動(dòng)駕駛汽車(chē)
自動(dòng)駕駛汽車(chē):(Autonomousvehicles;Self-pilotingautomobile
2023-10-07 14:24:35
本文介紹了一種可以高精度的測(cè)量電阻的方法。
2021-05-10 06:38:57
他慣性檢測(cè)結(jié)合起來(lái),結(jié)果有助于改進(jìn)MEMS技術(shù)的實(shí)際應(yīng)用。實(shí)際上,這要求使用加速度計(jì)和陀螺儀。市場(chǎng)上已經(jīng)出現(xiàn)慣性測(cè)量單元,其中包括一個(gè)多軸加速度計(jì)、一個(gè)多軸陀螺儀,并且為了進(jìn)一步提高首向精度,還有一個(gè)多
2018-11-01 11:33:50
求大神分享基于SOC的高精度傾角測(cè)量系統(tǒng)的設(shè)計(jì)方案
2021-04-15 06:15:37
盡管MEMS(微機(jī)電系統(tǒng))技術(shù)在氣囊和汽車(chē)壓力傳感器中的應(yīng)用已有大約20年,但促使大眾認(rèn)識(shí)到慣性傳感器作用的是任天堂的 Wii?和Apple? iPhone?手機(jī)。然而,在一定程度上,流行的看法
2019-07-16 06:49:53
FEBFIS1100MEMS_IMU6D3X,用于FIS1100 6D MEMS慣性測(cè)量單元(IMU)的評(píng)估板,帶有傳感器融合,用于指定系統(tǒng)級(jí)定向精度。將FIS1100與提供的XKF3 9D傳感器
2020-05-04 13:24:41
陀螺儀式慣性導(dǎo)航系統(tǒng)實(shí)現(xiàn)的理論推導(dǎo)與數(shù)學(xué)原理,實(shí)現(xiàn)了其核心導(dǎo)航算法,并通過(guò)仿真與實(shí)車(chē)試驗(yàn)對(duì)算法進(jìn)行了驗(yàn)證,為最終將無(wú)陀螺儀式慣性導(dǎo)航系統(tǒng)的軟硬件集成到智能輔助駕駛試驗(yàn)車(chē)上,實(shí)現(xiàn)汽車(chē)狀態(tài)信息的實(shí)時(shí)、高精度和低價(jià)位的測(cè)量提供了有效的方法。[hide] [/hide]
2009-12-02 12:40:03
在技術(shù)應(yīng)用中測(cè)量傾斜度,加速度和振動(dòng)需要高精度的慣性傳感器:MEMS(微型機(jī)電系統(tǒng))系列傳感器采用單晶硅傳感器元件,融合最先進(jìn)的微機(jī)械加工技術(shù)。不同的微機(jī)械加工技術(shù)用于生產(chǎn),每種技術(shù)都有
2020-07-07 09:36:40
基于這樣一個(gè)事實(shí):給MEMS施加一個(gè)輸入力(Fin)將產(chǎn)生一定的位移,進(jìn)而改變MEMS電容(Cout)。這個(gè)Cout可以用連接MEMS單元的電路進(jìn)行測(cè)量。帶激勵(lì)電極的MEMS傳感器建模如圖1所示。這個(gè)
2018-11-06 16:07:28
請(qǐng)問(wèn)如何利用AD5933實(shí)現(xiàn)高精度生物阻抗測(cè)量?
2021-04-12 06:32:35
如何去實(shí)現(xiàn)高精度的功率轉(zhuǎn)換效率測(cè)量?
2021-04-29 07:14:18
如何對(duì)高精度直流電壓測(cè)量進(jìn)行優(yōu)化?
2021-05-12 06:27:49
本文設(shè)計(jì)了一種高精度時(shí)間間隔測(cè)量模塊,介紹了該模塊的軟硬件實(shí)現(xiàn)方法。大量實(shí)驗(yàn)證明本模塊可以實(shí)現(xiàn)對(duì)微小時(shí)間間隔的精確測(cè)量,具有很高的應(yīng)用價(jià)值。
2021-05-17 07:03:28
傳統(tǒng)的姿態(tài)測(cè)量因?yàn)椴捎?b class="flag-6" style="color: red">高精度陀螺儀和加速度計(jì)等姿態(tài)傳感器,體積龐大并且價(jià)格昂貴。當(dāng)前MEMS產(chǎn)品因其體積小、價(jià)格低、功耗低,被稱為是傳統(tǒng)的慣性測(cè)量組合的一次重大改革,越來(lái)越多地應(yīng)用于姿態(tài)測(cè)量應(yīng)用中
2020-04-15 07:12:20
有大神用過(guò)MEMS角速率傳感器嗎,幫忙推薦一款高精度的吧,謝謝了
2015-05-18 16:01:02
微米傳感器是屬于高精度的傳感器嗎?可測(cè)量的最大精度是多少?
2015-07-19 09:41:08
],我們的最新一代慣性傳感器——汽車(chē)級(jí)的ASM330LHH可實(shí)現(xiàn)精確定位,讓汽車(chē)駕駛變得更安全、更智能。”工程樣片將于2018年第三季度交付客戶評(píng)測(cè),第四季度開(kāi)始量產(chǎn)。ASM330LHH詳細(xì)信息?工作溫度
2018-07-17 16:46:16
無(wú)錫瑞吉星電子的RJX-IMU-164系列;
參數(shù)如下:
一 、概述
RJX-IMU-16460高精度慣性測(cè)量單元是一款小型高精度MEMS慣性測(cè)量單元,可與ADIS-16460實(shí)現(xiàn)原位插拔替換、內(nèi)部
2024-01-18 13:46:16
基于 MEMS 的慣性測(cè)量裝置 (IMU) 可定義為系統(tǒng)級(jí)封裝。 它包括加速計(jì)機(jī)械感測(cè)元件、陀螺儀機(jī)械感測(cè)元件以及電子電路(“大腦”),以便將加速度和角速度轉(zhuǎn)換為可讀格式。 MEMS IMU 的開(kāi)發(fā)
2017-03-31 12:31:30
ADIS16334和 ADIS16375是兩款高度集成的精密 MEMS(微機(jī)電系統(tǒng))慣性傳感器,可以幫助工業(yè)和醫(yī)療設(shè)備制造商更輕松地實(shí)現(xiàn)運(yùn)動(dòng)捕獲和控制功能。新款 IMU(慣性測(cè)量單元)實(shí)現(xiàn)了極高
2018-12-04 15:25:12
不變是一項(xiàng)極具挑戰(zhàn)性的工作。此外,每級(jí)裝配(傳感器到封裝、封裝到PCB、PCB到外殼等)都會(huì)增加安裝誤差。由于傳感器裝配方位(相對(duì)于慣性坐標(biāo)系)決定系統(tǒng)精度,所以此時(shí)必須將所有誤差降至最小。圖2所示為
2018-11-12 15:38:15
如何實(shí)現(xiàn)高精度熱電阻測(cè)量電路的設(shè)計(jì)?常用的熱電阻測(cè)量方法有哪些?恒壓分壓式三線制測(cè)量電路的原理是什么?提高測(cè)量精度的措施有哪些?
2021-04-13 06:08:39
高精度AC電流檢測(cè)系統(tǒng)是什么工作原理?造成高精度AC電流檢測(cè)系統(tǒng)測(cè)量誤差的原因是什么?非接觸式高精度AC電流檢測(cè)系統(tǒng)及其實(shí)驗(yàn)和誤差分析
2021-04-13 06:54:17
,不考慮耐用性較差消費(fèi)級(jí)產(chǎn)品的其他潛在誤差源的話,二者性能相差至少20倍。圖6. 6自由度慣性測(cè)量單元ADIS16460,在復(fù)雜和動(dòng)態(tài)環(huán)境中也能提供高精度水平表6. 在動(dòng)態(tài)運(yùn)動(dòng)中,線性g和對(duì)準(zhǔn)是主要
2018-10-19 10:51:47
YIS370-U是一款輕量級(jí)、小尺寸、高精度、低功耗的工業(yè)級(jí)慣性測(cè)量單元,為無(wú)人智能化載體、穩(wěn)定平臺(tái)、導(dǎo)航控制等應(yīng)用提供精確的IMU原始角速率、加速度等信息。
2022-06-17 15:18:03
開(kāi)發(fā)一種生物運(yùn)動(dòng)微慣性測(cè)量裝置,以基于 ARM7 的LPC2129 為核心處理單元,采用MEMS 陀螺和MEMS 加速度計(jì)為測(cè)量傳感器。該裝置實(shí)現(xiàn)了對(duì)SPC-III 機(jī)器魚(yú)尾鰭拍動(dòng)參數(shù)的精確測(cè)量,為
2009-11-26 11:49:30 17
17 為解決自動(dòng)水平調(diào)節(jié)系統(tǒng)和工程應(yīng)用中傾角測(cè)量高成本、低精度的問(wèn)題,提出了一種利用MEMS雙軸傾角傳感器、信號(hào)調(diào)理和SOC等電路實(shí)現(xiàn)高精度傾角測(cè)量的方法,并從傳感器信號(hào)穩(wěn)定
2010-12-07 13:56:3525
高精度壓力測(cè)量電路
2009-02-09 12:53:21812 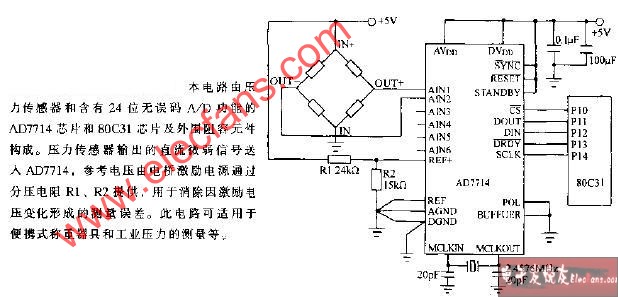
ADISl6355 MEMS的慣性測(cè)量組件系統(tǒng)設(shè)計(jì)
首先簡(jiǎn)介ADISl6355AMLZ型MEMS的原理、構(gòu)成及應(yīng)用。在此基礎(chǔ)上,搭建一個(gè)硬件平臺(tái),采用內(nèi)置USB控制器的AT89C513lA型單片機(jī)
2010-04-07 14:30:07577 
提出了一種捷聯(lián)式慣性測(cè)量單元的設(shè)計(jì)與實(shí)現(xiàn)方法。該系統(tǒng)以開(kāi)環(huán)光纖陀螺和硅微加速度計(jì)作為慣性敏感元件,采用高速DSP 作為中央處理器實(shí)現(xiàn)數(shù)據(jù)采集、處理及輸出。重點(diǎn)介紹了系統(tǒng)
2011-09-13 15:01:5020 霍尼韋爾(紐交所代碼:HON)近日宣布推出6DF系列六維運(yùn)動(dòng)變量型慣性測(cè)量單元,6DF系列產(chǎn)品可以應(yīng)用在交通運(yùn)輸系統(tǒng)、工業(yè)和航天系統(tǒng)。
2013-03-05 18:15:351156 MEMS慣性測(cè)量單元自動(dòng)校準(zhǔn)算法研究與實(shí)現(xiàn)
2015-11-25 10:22:4919 對(duì)于在反饋環(huán)路中采用MEMS慣性測(cè)量單元(IMU)的高性能運(yùn)動(dòng)控制系統(tǒng),傳感器對(duì)準(zhǔn)誤差常常是其關(guān)鍵考慮之一。
2016-11-05 03:56:253580 
基于MEMS陀螺和加計(jì)的微慣性測(cè)量單元研制
2016-12-17 16:33:3912 基于分度臺(tái)轉(zhuǎn)位裝置的慣性測(cè)量單元智能檢測(cè)_王斌
2017-01-12 22:48:461 高精度脈沖電源測(cè)量
2017-09-12 14:40:458 和加速度,并以此解算出物體的姿態(tài),在導(dǎo)航中用著很重要的應(yīng)用價(jià)值,慣性測(cè)量單元(IMU)PA-IMU-01D采用三個(gè)單軸的高精度MEMS陀螺儀和三個(gè)單軸的高精度MEMS加速度計(jì),通過(guò)信號(hào)調(diào)理
2018-04-27 16:33:471885 麥姆斯咨詢:高精度慣性傳感器主要用于測(cè)量傾角、加速度和振動(dòng)等。慣性傳感器作為MEMS器件,以單晶硅傳感器元件為基礎(chǔ),采用最新的微機(jī)械加工技術(shù)制備。
2019-01-29 16:35:2117350 
新納傳感系統(tǒng)有限公司(下稱“新納傳感”)今天在SENSOR CHINA2019推出了全新產(chǎn)品 OpenIMU330。作為一款基于MEMS技術(shù)的6-DOF三重冗余高精度慣性測(cè)量單元
2019-09-12 11:40:004414 慣性測(cè)量單元Inertial measurement unit,簡(jiǎn)稱IMU,是測(cè)量物體三軸姿態(tài)角(或角速率)及加速度的裝置。陀螺儀和加速度計(jì),是慣性導(dǎo)航系統(tǒng)的核心裝置。借助內(nèi)置的加速度傳感器和陀螺儀,IMU可測(cè)量來(lái)自三個(gè)方向的線性加速度和旋轉(zhuǎn)角速率,通過(guò)解算可獲得載體的姿態(tài)、速度和位移等信息。
2019-10-04 17:12:0010524 MEMS慣性傳感器包括MEMS陀螺儀及MEMS加速度計(jì),其分類有多種方式,根據(jù)精度由低到高其可分為消費(fèi)級(jí)(零偏》100°/h)和戰(zhàn)術(shù)級(jí)(零偏0.1°/h ~ 10°/h)。
2019-10-10 15:05:117588 慣性測(cè)量單元(Inertialmeasurementunit,簡(jiǎn)稱IMU)被定義為“無(wú)需外部參考的可測(cè)量三維線運(yùn)動(dòng)及角運(yùn)動(dòng)的裝置”,即測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。
2020-01-23 11:49:003523 慣性測(cè)量單元(Inertialmeasurementunit,簡(jiǎn)稱IMU)被定義為“無(wú)需外部參考的可測(cè)量三維線運(yùn)動(dòng)及角運(yùn)動(dòng)的裝置”,即測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。
2020-02-12 15:58:243698 詳細(xì)解說(shuō)IMU慣性測(cè)量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車(chē)、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-11 11:00:131753 詳細(xì)解說(shuō)IMU慣性測(cè)量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車(chē)、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-01 11:22:016930 慣性測(cè)量單元的原理和應(yīng)用介紹 慣性測(cè)量單元是通過(guò)加速度計(jì)和陀螺儀測(cè)量運(yùn)動(dòng)載體的方位與姿態(tài)的裝置,它與AHRS的功能與裝置都很相像,但是最大的區(qū)別是航姿參考系統(tǒng)包含了嵌入式的姿態(tài)數(shù)據(jù)解算單元與航向信息
2020-06-01 11:09:294336 慣性測(cè)量單元的原理和應(yīng)用介紹 慣性測(cè)量單元是通過(guò)加速度計(jì)和陀螺儀測(cè)量運(yùn)動(dòng)載體的方位與姿態(tài)的裝置,它與AHRS的功能與裝置都很相像,但是最大的區(qū)別是航姿參考系統(tǒng)包含了嵌入式的姿態(tài)數(shù)據(jù)解算單元與航向信息
2020-06-08 17:24:232644 IMU慣性測(cè)量單元是什么? 慣性測(cè)量單元是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。一般的,一個(gè)IMU包含了三個(gè)單軸的加速度計(jì)和三個(gè)單軸的陀螺,加速度計(jì)檢測(cè)物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度
2020-04-20 10:32:576231 IMU慣性測(cè)量單元是什么? IMU大多用在需要進(jìn)行運(yùn)動(dòng)控制的設(shè)備,如汽車(chē)和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場(chǎng)合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。 IMU的基組成 利用
2020-04-18 00:35:09741 慣性測(cè)量單元的應(yīng)用 慣性測(cè)量單元用于安裝了慣性導(dǎo)航系統(tǒng)的交通工具。如今,幾乎每個(gè)商業(yè)或軍事船只都安裝了慣性測(cè)量單元。大多數(shù)飛機(jī)也配備了慣性測(cè)量單元。同時(shí),慣性測(cè)量單元也在飛行器中單獨(dú)使用,將慣性測(cè)量
2020-04-26 11:28:34731 慣性測(cè)量單元的應(yīng)用 慣性測(cè)量單元用于安裝了慣性導(dǎo)航系統(tǒng)的交通工具。如今,幾乎每個(gè)商業(yè)或軍事船只都安裝了慣性測(cè)量單元。大多數(shù)飛機(jī)也配備了慣性測(cè)量單元。同時(shí),慣性測(cè)量單元也在飛行器中單獨(dú)使用,將慣性測(cè)量
2020-04-26 11:19:071727 IMU慣性測(cè)量單元介紹 慣性測(cè)量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測(cè)當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測(cè)在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些慣性測(cè)量單元還同時(shí)包括
2020-06-08 14:29:334055 IMU慣性測(cè)量單元詳解 慣性測(cè)量單元的工作原理。慣性測(cè)量單元的工作原理是:使用一個(gè)或多個(gè)加速度感應(yīng)器,探測(cè)當(dāng)前的加速度速率;使用一個(gè)或多個(gè)偏航陀螺儀,檢測(cè)在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些
2020-06-01 10:37:199180 近幾年來(lái),MEMS慣性傳感器發(fā)展迅速,精度不斷提高。雖然精度相比光纖陀螺、激光陀螺仍有很大差距,但是其價(jià)格低、體積小、重量輕,使MEMS慣性導(dǎo)航系統(tǒng)在慣性導(dǎo)航系統(tǒng)中發(fā)揮重要作用。
2020-07-14 15:32:553355 Roessingh研發(fā)公司利用Xsens的ADI MEMS驅(qū)動(dòng)的慣性傳感器技術(shù)以前所未有的三維精度測(cè)量賽艇運(yùn)動(dòng)學(xué)
2021-04-29 15:47:512 ADIS16350:高精度三軸慣性傳感器
2021-05-10 12:31:316 iSensor MEMS慣性測(cè)量單元(IMU)手冊(cè)
2021-05-24 09:37:1121 九軸慣性測(cè)量單元IMU_MPU6050中文數(shù)據(jù)手冊(cè)。
2022-03-07 16:31:472 LPMS-BE2 是一款低成本、高精度的 6 軸慣性測(cè)量單元。它整合了三軸加速度計(jì)、三軸陀螺儀傳感器,能提供包括歐拉角、四元數(shù)和加速度等信息在內(nèi)的精確數(shù)據(jù)。
2022-06-22 18:01:40456 
據(jù)麥姆斯咨詢介紹,慣性測(cè)量單元(Inertial Measurement Unit,IMU)是測(cè)量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。通常,IMU內(nèi)部集成3軸陀螺儀和3軸加速度計(jì),以及運(yùn)動(dòng)/姿態(tài)算法。如果IMU內(nèi)部集成的傳感器采用MEMS技術(shù)實(shí)現(xiàn),那么可被稱為MEMS IMU。
2022-09-28 10:32:22788 意法半導(dǎo)體于2022年推出智能傳感器處理單元(Intelligent Sensor Processing Unit,ISPU),在MEMS慣性傳感器內(nèi)部進(jìn)一步整合數(shù)字信號(hào)處理器(DSP)和人工智能算法,為系統(tǒng)級(jí)封裝(SiP)器件注入本地決策,同時(shí)顯著節(jié)省空間和功耗,并通過(guò)將數(shù)據(jù)保持在本地增強(qiáng)隱私安全性。
2022-10-26 11:13:181106 DG606姿態(tài)傳感模組是基于MEMS慣性傳感技術(shù)的超小型、高精度慣性測(cè)算系統(tǒng),該系統(tǒng)內(nèi)嵌了一顆經(jīng)過(guò)標(biāo)定的中宏威宇 MotionCore 軟、硬件核心,可以在任意時(shí)刻、任意運(yùn)動(dòng)狀態(tài)下精確輸出載體的三個(gè)姿態(tài)角。
2022-11-02 11:29:34604 慣性導(dǎo)航是目前國(guó)內(nèi)緊缺的高新技術(shù),市場(chǎng)需求多、發(fā)展?jié)摿Υ蟆?b class="flag-6" style="color: red">MEMS慣性傳感器雖然具有微型化、成本低等優(yōu)點(diǎn),然而,單一的消費(fèi)級(jí)MEMS慣性傳感器存在測(cè)量誤差大、穩(wěn)定性差等缺陷,這會(huì)導(dǎo)致MEMS慣性
2022-11-11 09:54:54868 電子發(fā)燒友網(wǎng)站提供《使用arduino/genuino 101的板載慣性測(cè)量單元(IMU)教程.zip》資料免費(fèi)下載
2022-12-19 09:35:230 直接使用慣性測(cè)量單元 (IMU)
2022-12-28 09:51:22750 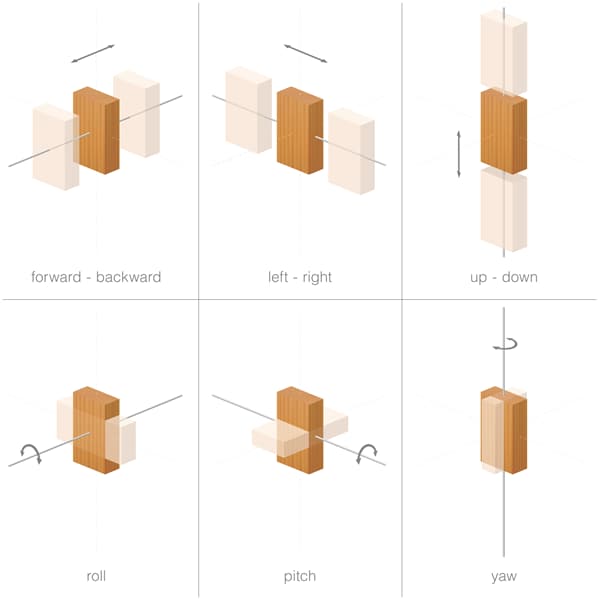
理想情況下,陀螺儀和加速度計(jì)中的多個(gè)軸相互正交。然而,一個(gè)常見(jiàn)的誤解是,由于多軸陀螺儀或加速度計(jì)可以在一個(gè)分立的MEMS組件內(nèi)設(shè)計(jì),因此每個(gè)軸彼此成90°完全正交。盡管這些設(shè)備中的所有慣性傳感器
2023-02-16 11:42:22603 
HMS-MM-10系列產(chǎn)品是6自由度的慣性測(cè)量單元,包含高精度,MEMS三軸陀螺儀和三軸加速度計(jì),可以測(cè)量運(yùn)動(dòng)物體的角速度、加速度參數(shù),適用于物體運(yùn)動(dòng)控制或振動(dòng)狀態(tài)下的慣性測(cè)量。HMS-MM-10
2021-09-22 17:57:55452 
航向姿態(tài)參考系統(tǒng)(英文簡(jiǎn)稱AHRS)和慣性測(cè)量單元(英文簡(jiǎn)稱IMU)的聯(lián)系與區(qū)別
2021-12-17 14:10:36736 
三坐標(biāo)測(cè)量機(jī)是高精度測(cè)量儀器,平時(shí)我們?cè)谑褂萌鴺?biāo)測(cè)量機(jī)測(cè)量工件的同時(shí),也要注意機(jī)器的保養(yǎng),以延長(zhǎng)機(jī)器的使用壽命。正確使用三坐標(biāo)測(cè)量機(jī)對(duì)其使用壽命、精度起到關(guān)鍵作用。
2022-11-14 10:09:35878 
TAC-440 IMU的突破性性能基于EMCORE成熟的石英MEMS慣性傳感器技術(shù)。EMCORE的石英技術(shù)結(jié)合了石英材料固有的大信號(hào)輸出和熱穩(wěn)定性,可重復(fù)、大批量生產(chǎn)精密加工的傳感器結(jié)構(gòu)。
2023-09-15 11:48:12141 機(jī)構(gòu)指出,GNSS/IMU的組合導(dǎo)航系統(tǒng),可充分發(fā)揮GNSS長(zhǎng)期高精度性能和IMU短期高精度性能的優(yōu)勢(shì),為自動(dòng)駕駛汽車(chē)提供連續(xù)、高精度和高可靠的位置信息。MEMS IMU作為一個(gè)重要的傳感器應(yīng)用領(lǐng)域
2023-09-20 08:46:54252 村田MEMS慣性測(cè)量單元(IMU)SCHA634產(chǎn)品分析
2023-11-27 16:27:32387 
在電子領(lǐng)域中,高精度電壓源扮演著關(guān)鍵的角色,為各種應(yīng)用提供穩(wěn)定、準(zhǔn)確的電壓信號(hào)。它是由精確的電壓源和精密的參考電路組成。下面Aigtek西安安泰電子將為大家介紹高精度電壓源的作用及其在電壓測(cè)量
2023-12-19 10:11:22141 
M-G370PDS0是一個(gè)小的形狀因子慣性測(cè)量單元(IMU),具有6個(gè)自由度:三軸角率和線性加速度,并提供高穩(wěn)定性和高精度的測(cè)量能力精密補(bǔ)償技術(shù)。各種校準(zhǔn)參數(shù)被存儲(chǔ)在IMU的存儲(chǔ)器中,并且是
2024-01-11 09:55:450 一般描述M-G552PJ1是一個(gè)小的形狀因子慣性測(cè)量單元(IMU),具有6個(gè)自由度:三軸角速率和線性加速度,并提供了高穩(wěn)定性和高精度的測(cè)量能力與使用的高精度補(bǔ)償技術(shù)。通過(guò)控制器局域網(wǎng)(CAN)接口
2024-01-12 10:56:270 據(jù)麥姆斯咨詢報(bào)道,綜合電子元器件全球制造商村田(Murata)近日發(fā)布了一款新的6軸MEMS慣性傳感器SCH16T-K01,可實(shí)現(xiàn)高精度機(jī)器控制和定位應(yīng)用。
2024-01-17 09:59:57484 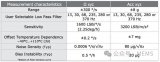
關(guān)于慣性測(cè)量單元的應(yīng)用場(chǎng)景闡述
2024-01-19 11:25:22288
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論