 電子發燒友App
電子發燒友App


進入2023年國內自動駕駛已經卷城市導航輔助駕駛卷了很長一段時間,然而城市的功能真正體驗過的用戶我敢說依舊少得可以忽略不計,究其原因,難度指數級增長的城市功能與企業希望線性迭代推出新功能的渴望產生了錯配,所以2023年在城市功能還遲遲無法落地實際用戶的當下(這里忽略媒體宣傳),“通勤模式”似乎是眾多車企給出的一份過渡期答卷,用戶自己訓練自動駕駛系統的概念聽起來幾乎帶有魔力,然而“通勤模式“早不來晚不來,偏偏在城市落地遇阻的當下才姍姍進入人們視野,是天才的靈感乍現,還是“通勤模式”另有隱情,今天就深入解析一下這一突然火起來的概念通勤模式或者叫做記憶行車模式。 ?
1. “通勤模式“橫空出世
小鵬作為國內量產自動駕駛走的最快的公司之一,在2023年3月首次提出“通勤模式”的概念,隨后大疆6月也提出了基于低成本硬件的“記憶行車模式”,通勤模式這一概念開始進入公眾視野。然而“通勤模式”并非解決自動駕駛商業模式困境的天才創新,而是產品設計不得已向技術發展作出的妥協。實際上“通勤模式”或者“記憶行車模式”的想法簡單樸素,就是利用限定固定路線以及多次采集數據來限制和簡化城市導航輔助駕駛功能,然而雖然是簡化,在我看來其技術路徑仍舊存在諸多難點,把“通勤模式”當作城市輔助駕駛遲遲難以落地的臨時折中方案可能并不像大家想的那樣簡單。
小鵬首先提出通勤模式的概念以期彌補高精地圖未覆蓋區域用戶的城市輔助駕駛體驗
實際上記憶行車仍舊是一種導航輔助駕駛,與目前小鵬,華為等公司依賴高精地圖和地理圍欄劃定ODD區域(功設計開放域)的城市導航輔助駕駛可以說是一體兩面,其本質都是在功能開啟范圍受到技術限制無法達到全域開放的情況下,對功能開啟地理位置的一種約束:高精地圖地理圍欄將ODD區域限制在高精地圖覆蓋且經過測試,風險可控的地點;而記憶行車則將ODD區域限制在每個用戶高頻使用的路線上進行所謂熟路模式。
記憶行車和依賴高精地圖地理圍欄實際上是城市NOA的一體兩面,本質都是限制功能開啟的地理范圍
2. “通勤模式“帶來了新的機遇,也帶來了新的挑戰
我們先來看一下通勤模式的三個潛在優勢,可以通過Overfit訓練私有模型,可以通過多趟采集構建通勤地圖Map,可以通過人類司機示范記憶固定路線導航軌跡Route。
通勤模式模式三種潛在價值
2.1 具體路線私有模型Overfit訓練
具體路線小的樣本集看似可以通過過擬合(Overfit)模型獲得較好的性能,然而實際上這在產品上是幾乎不可能實現。以目前的深度學習技術范式來講,要為成千上萬個用戶量身定做模型,即使是在統一的大數據集上先訓練過再為每個用戶針對性finetune通勤路線直到過擬合也是行不通的,畢竟模型版本控制每個用戶獨有的模型參數是一件幾乎不可能完成的MLOps災難,訓練資源也很難支持數以萬計的模型訓練,是否后續每次模型迭代都要重新進行全部用戶的finetune也是模型迭代的巨大挑戰。要知道即使是更容易實現,更接近AGI的NLP語言大模型GPT系列也無法為每個用戶訓練專屬模型參數,更不要提模型架構更分散,模型更多元的自動駕駛功能了。因此盡管聽上去很性感,很遺憾專屬路線過擬合這條路確實非常不切實際的。
2.2 針對性路線上單車多趟建圖
高精地圖地理圍欄一般會將高精地圖建圖沒有覆蓋,地圖制作有錯誤,有時效性問題,或者是場景過于復雜,安全風險較大的區域如環島,掉頭,車道線模糊,非機動車行人混行等路段排除在功能覆蓋ODD區域之外;通勤模式則通過針對性的建圖規避了高精地圖沒有覆蓋的問題,另外通過錄制軌跡簡化了自動駕駛導航的挑戰,但是時效性,復雜場景這些城市導航輔助的難題,通勤模式同樣需要解決。
雖然理論上聽起來通過反復錄制通行路線上的信息來完成針對性建圖是很巧妙的解決高精地圖沒有覆蓋的一個好主意,然而通勤模式在地圖獲取方面本質上是一個單車多趟建圖,其優勢很可能不如想象來得巨大。原因在于地圖采集與用戶通勤路線對車輛行駛模式有著非常不一樣的要求,地圖采集一般要求在動態車流遮擋較少的凌晨或者半夜進行采集,這樣可以最大程度避免動態物體對建圖的干擾,然而用戶通勤通常是在一天中交通流最繁忙的高峰時刻,周圍眾多車輛動態物體會遮擋場景,導致建圖質量急劇下降。
擁堵的交通會導致建圖采集的信息非常受限
其次為了彌補采集車傳感器視野范圍限制,保證采集地圖的完整性,會要求地圖采集在同一段路反復開多趟,并且遍歷所有路口進出車道,而固定通勤路線通常無法覆蓋所有車道和路口通行方向,這樣建出的地圖完整性很難保證,也對依賴于其他路口方向的他車軌跡預測,規劃控制等下游模塊造成嚴重影響。
通勤軌跡無法遍歷路口各個方向
第三,地理圍欄雖然主要為了規避高精地圖未覆蓋區域,但是它也提供給自動駕駛公司一個應對困難危險場景的有效手段。例如掉頭場景側后方視野不佳,功能執行風險較高,可以用非ODD排除掉;人車混行的道路擦碰風險極高,也可以用非ODD適當規避。然而通勤模式下每個用戶通勤路線可能非常多樣復雜,從產品設計角度,通勤模式為的是讓盡量多的用戶都可以使用這個功能,那么就不太可能因為某個用戶回家路線經過喧鬧市集或者需要掉頭就禁止用戶使用通勤功能,因此在處理復雜場景的情況下反而增加了導航輔助駕駛的難度和風險。
最后一個原因,在我國現行政策下,地圖是高度敏感的地理信息,用戶通勤模式進行地圖構建則可能有政策風險。
2.3 存儲記憶的用戶通勤行駛軌跡
相比私有模型overfit的不靠譜以及通勤地圖的問題多多,我認為通勤模式能帶來的最大的優勢其實是來自用戶示范的軌跡記憶以及基于記憶軌跡的導航了。
實際上如今除Tesla外的自動駕駛公司很難擺脫對高精地圖的依賴最主要的原因還不是因為高精地圖在提供感知先驗和超視距能力上的優勢,甚至不是高精地圖在他車和行人VRU等軌跡預測功能上重要作用,更多的是因為沒了高精地圖就很難將導航路徑與具備精確尺寸的超視距地圖環境信息結合在一起從而指導路徑規劃。古希臘神話里忒修斯手持繩索進入迷宮并殺死怪物彌諾陶洛斯后,沿著手里的繩索的引領最終走出了怪物的迷宮。
依賴高精地圖導航的自動駕駛車輛就好像牽著通往出口繩索的希臘英雄忒修斯,繩索在就不會迷失
實際上對目前的大多數依賴高精地圖的自動駕駛系統來說,基于高精地圖的導航信息就像自動駕駛系統手里握著的一條通往目的地的繩索,自動駕駛車規劃軌跡只能在感知到局部障礙物時選擇臨時偏離導航路徑軌跡對障礙物進行避讓,避讓后必須盡快回到對導航路徑的跟蹤上來,一旦偏離導航軌跡太多,就需要依賴高精地圖實時重新規劃導航路徑。而沒有了高精地圖的最大問題就是導航路徑這條繩索無處附著,所以想去掉對高精地圖的依賴就好像要扔掉繩索找迷宮的出口一樣,非常困難。
記憶的軌跡路徑在沒有高精地圖的前提下從另一個角度解決了導航軌跡的問題,因為有著之前錄制的軌跡就好像直接給車子這樣一條完整的繩索,保持對這條錄制軌跡的追蹤就能確保自動駕駛規控不會迷失方向,只需要在實時根據感知規劃出沿著記憶路徑并繞開動態障礙物的路線就能帶用戶到達終點。
3. “通勤模式”技術實現的一種設想
“通勤模式“作為一個新的概念,產業界沒有足夠的成功案例參考,同時由于通勤模式本質是產品設計對技術的妥協,創新性不足,學術界也研究的不多,所以實現“通勤模式”的技術方案尚不明朗。根據上面的分析,我個人認為“通勤模式”應該以重記憶軌跡的運用為主,以通勤地圖建圖為輔的原則來設計系統實現。 ? “通勤模式”技術方案的核心是最大程度利用好記憶軌跡,記憶的軌跡是一組全局坐標下的經緯度姿態組成的點串,同時記憶軌跡還應包含在軌跡不同位置自車駕駛的動作信息以及他車和周圍環境的信息等。 ? 并不是讓車輛簡單追蹤軌跡就能完成通勤導航駕駛,我們人類開車是跟其他交通參與者協作進行的,駕駛必須遵守一套既定的交通規則,除了利用定位和控制算法讓自車盡量沿著導航路徑行駛之外,我們還需要確定車道的位置,避免壓線行駛,以及侵占他車路線,還要確定道路允許的行駛方向,避免左轉道直行等等。由于沒有了高精地圖提供這一系列語義信息,通勤模式的關鍵就是要我們把錄制的有偏差的軌跡從全局坐標系上根據實時感知到的周圍環境轉化到自車感知的局部坐標系上,也就是把global的route轉換成local的route,這樣借助自車實時感知來區分可行駛區域,車道線等道路元素信息,再結合local坐標系下的導航軌跡,便可以支持規控進行軌跡追蹤。如何將導航軌跡從global轉到local既可以基于傳統的導航綁路規則進行,也可以以定位位置,導航軌跡為輸入,利用模型直接聯合輸出與靜態道路元素融合一起的導航路徑軌跡。 ?
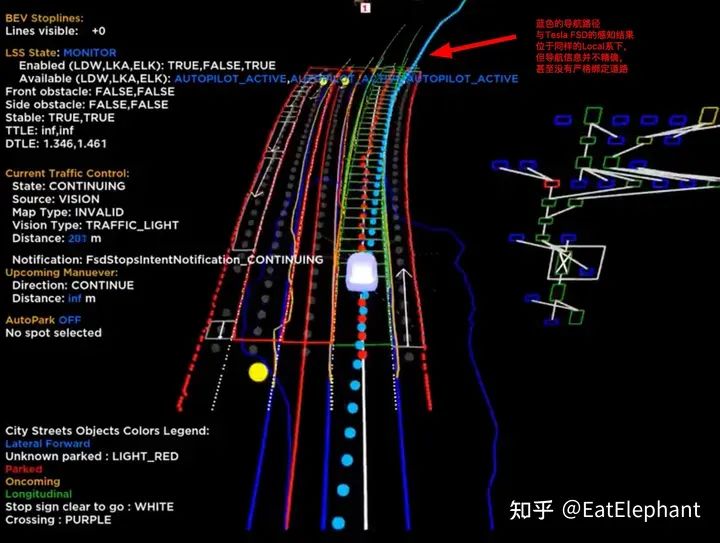
Tesla FSD的導航信息與感知同在Local坐標系下,但是并不精確,也沒有嚴格綁定車道 ? 最后針對用戶通勤路線,利用單車多趟數據還可以一定程度輔助解決困難場景,例如紅綠燈檢測和關聯在高精地圖先驗缺失的情況下十分困難,但是憑借多趟采集可以幫助算法定位紅綠燈大致位置,從而在實時指導檢測算法。另外由于實時感知和通勤地圖都無法保證視野完整性,因此通勤模式需要一定的不確定性來輔助規控進行行為決策,例如軌跡中某段有剎車,那么這里有交通燈,停止線的概率就很大,某處軌跡行駛緩慢,則可能這里交通狀況復雜,需要小心規劃軌跡。 ? 這樣有了記憶軌跡這條導航繩索,多趟記憶信息又幫助解決了一些復雜場景感知挑戰,最后系統只要沿著這條與實時感知對齊的Local坐標系的導航軌跡對實時交通狀況進行響應,允許部分偏離導航,但必須盡快回到導航路徑上來,就可以沿著記憶路徑完成駕駛。 ? 注意系統設計雖然可行,但是這途中仍舊需要強大的感知能力,這樣才能在人類駕駛員示范時盡可能生成相對完整的通勤地圖,同時能夠應對通勤駕駛途中的各種突發意外情況,合理的根據導航路徑與感知車道線的綁定關系選擇變道/繞行等操作。 ?
4. 總結
“通勤模式“引發熱切關注原因在于很多人認為通勤模式是解決高等級城市輔助駕駛落地范圍受限的一條捷徑,同時隨著通勤地圖的積累,通勤路線的過擬合,通勤模式會比城市導航輔助駕駛體驗更好,更高效安全,而一旦這樣體驗大大提升的覆蓋了大多數用戶高比例駕駛場景的功能落地,自動駕駛普及必然能進一大步,這樣自動駕駛商業化進步也必將伴隨而來。可是實際上通勤模式存在自己獨有的挑戰,而城市導航輔助駕駛真正的難題通勤模式也未必能避開,所以可能自動駕駛的大成沒有捷徑,長期修煉提高技術能力最終解決全域功能開啟也許才是更直接,更本質的目標。 ?
編輯:黃飛
?












 工商網監
工商網監
評論