 電子發燒友App
電子發燒友App


一、LIN總線概述
1、什么是LIN總線
LIN(Local Interconnect Network)即局部連接網絡,也被稱為“局域網子系統”即LIN總線是CAN總線網絡下的子系統,車上各個LIN總線系統之間的數據交換是由控制單元通過CAN數據總線實現的
LIN總線是一種輔助的串行通信總線網絡,多用于不需要CAN總線的帶寬和多功能的場合,LIN的目標是為現有汽車網絡(例如CAN總線)提供輔助功能
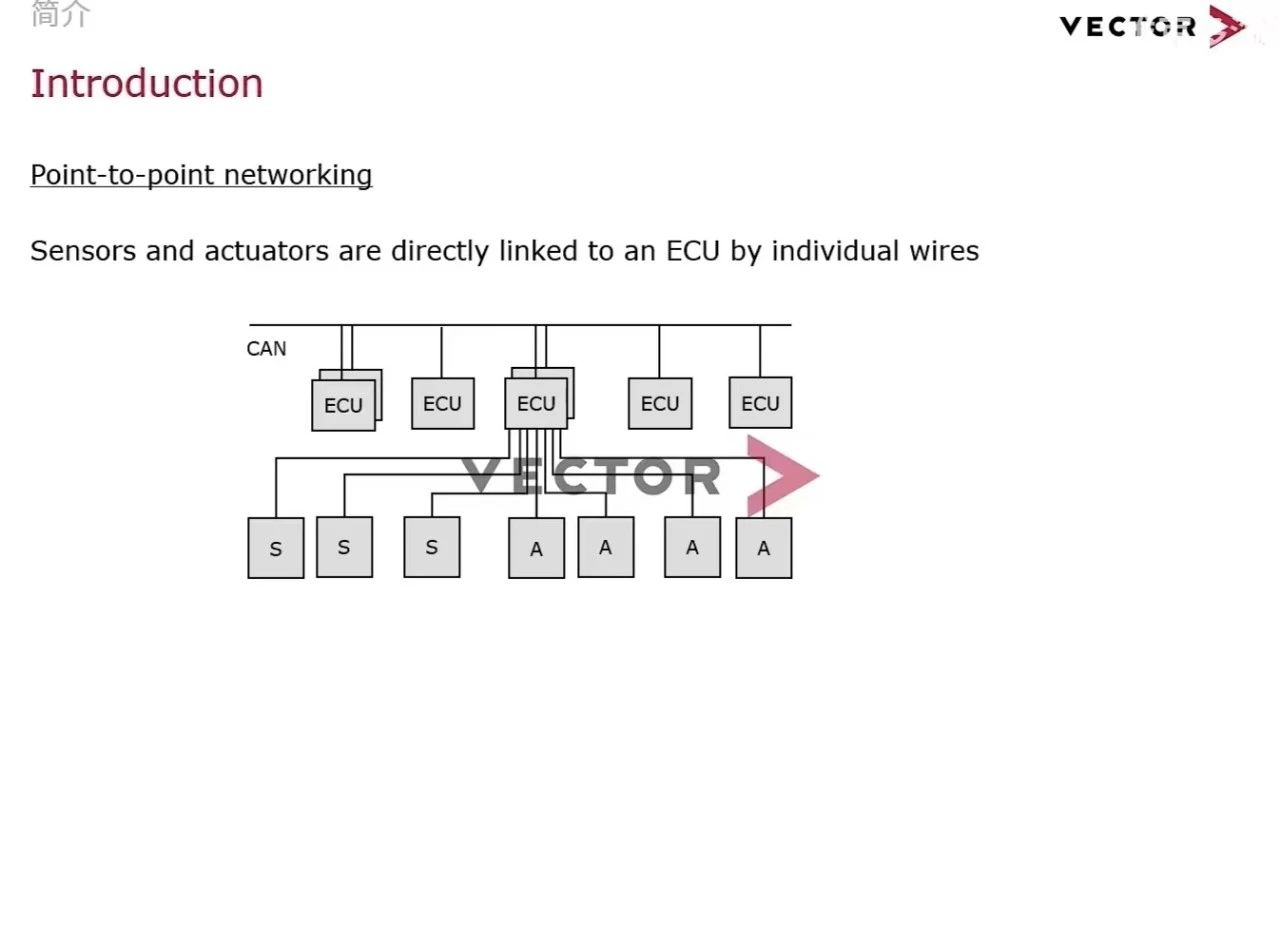
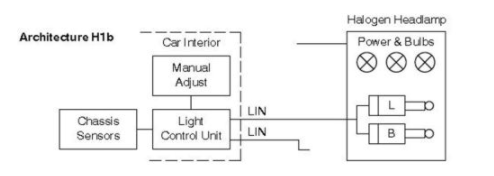
LIN典型的應用是車上傳感器和執行器的聯網,LIN屬于汽車上的A級網絡。
2、LIN總線的特點
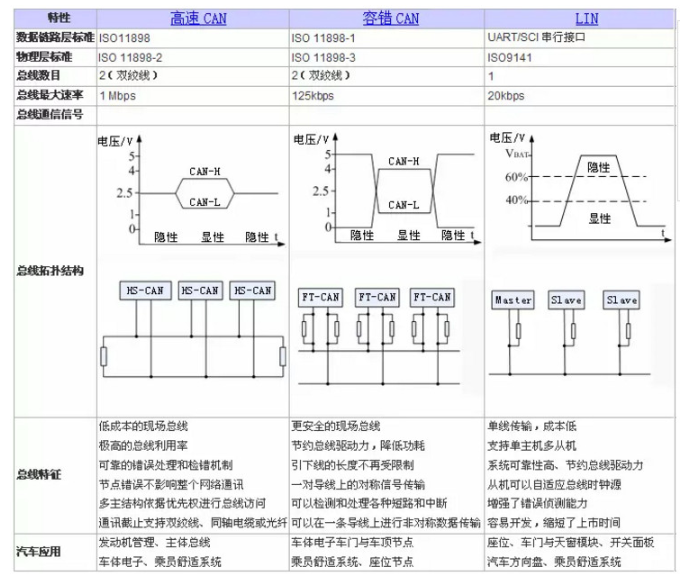
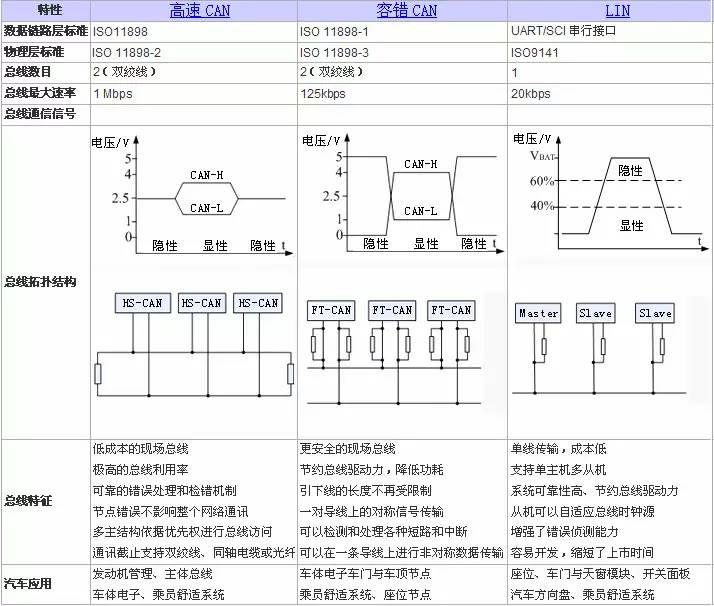
(1)工作方式:LIN總線為單主/多從方式
(2)數據傳輸線:LIN總線為單線傳輸
(3)工作電壓:LIN總線為12V
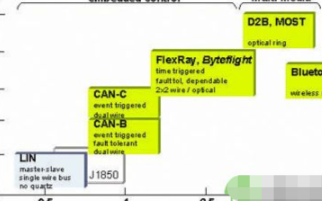
(4)傳輸速率:LIN總線最高為20kb/s,屬于低速總線(A類)
(5)傳輸距離:LIN總線最長為40m
(6)LIN總線無需仲裁
(7)傳輸的數據長度:LIN總線一幀信息中數據長度為2、4或8B
(8)標識符的位數:LIN總線有6位標識符
(9)節點數:LIN總線一般不超過16個
(10)傳輸線的顏色:LIN總線主色為紫色
3、LIN總線的優點
(1)在LIN系統中,加入新節點時,不需要其它從節點作任何軟件或硬件的改動
(2)整個網絡的配置信息只包含在主節點中,從節點可以自由地接入或脫離網絡而不會影響網絡中的通信LIN的網絡結構
(3)從節點不需振蕩器就能實現同步,節省了多個控制器部件的硬件成本
(4)基于通用UART接口,幾乎所有微控制器都具備LIN必需的硬件,價格低廉、結構簡單
二、LIN總線的結構原理
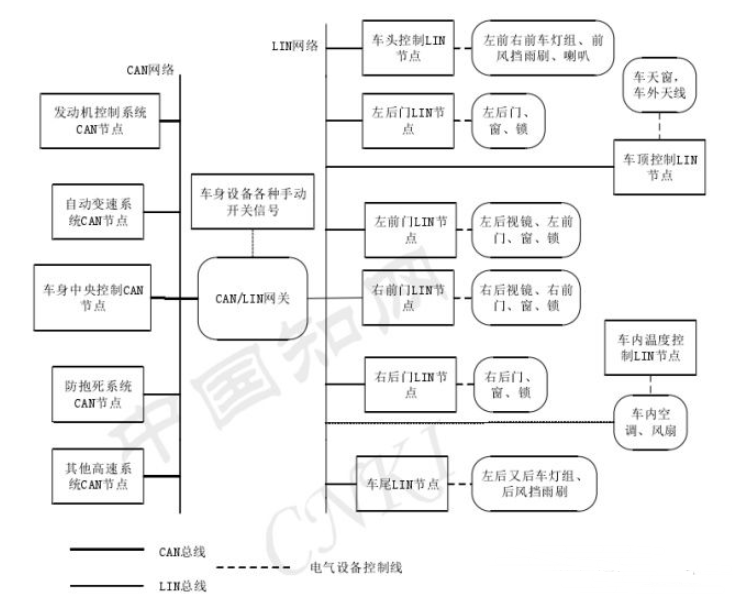
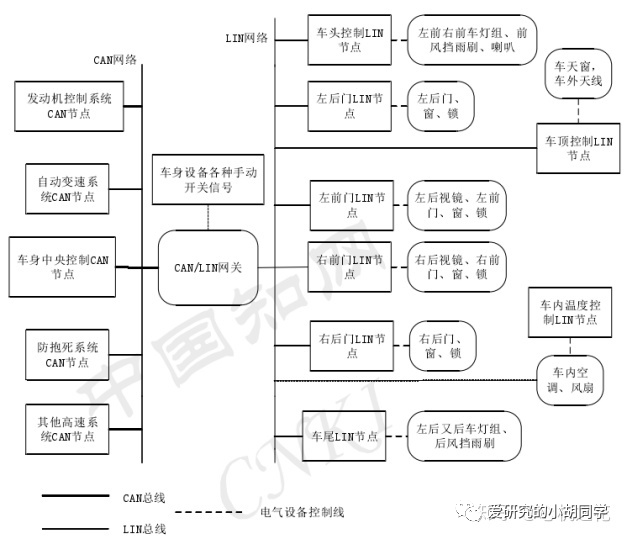
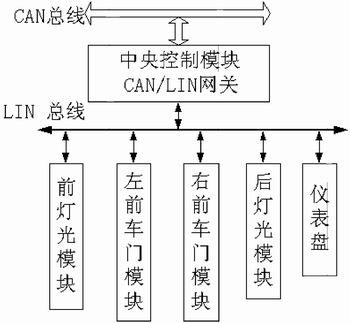
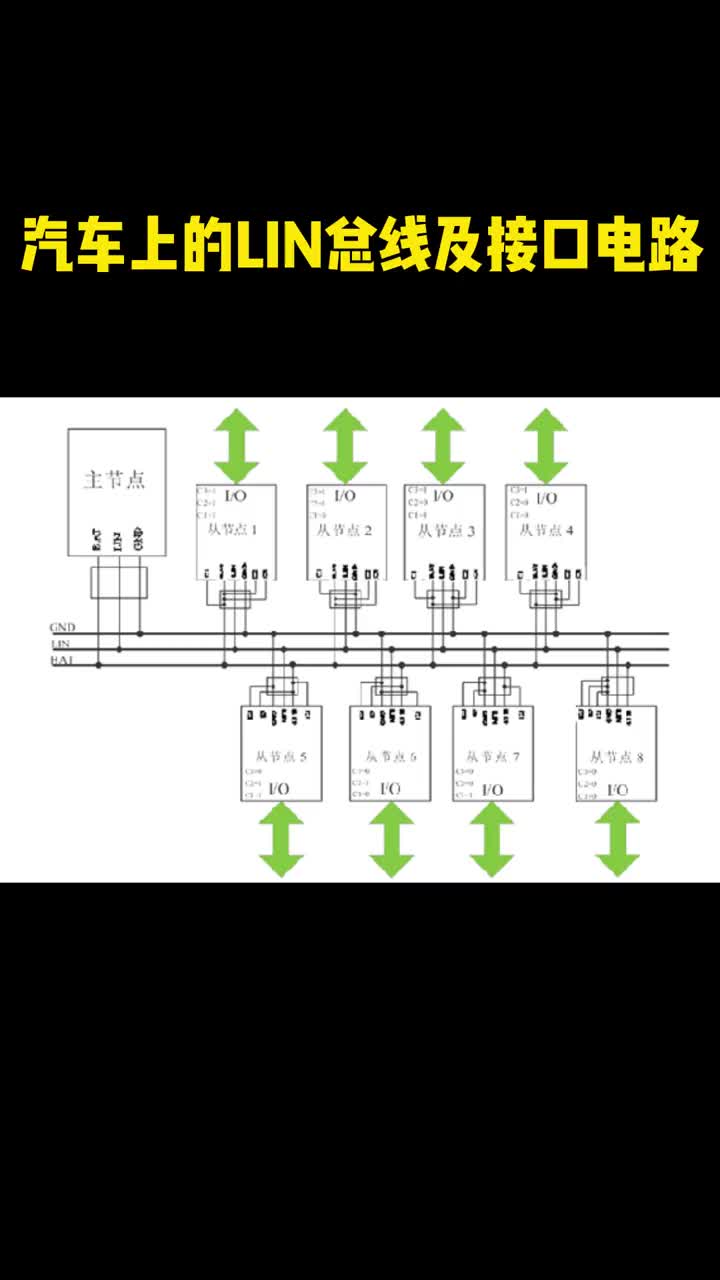
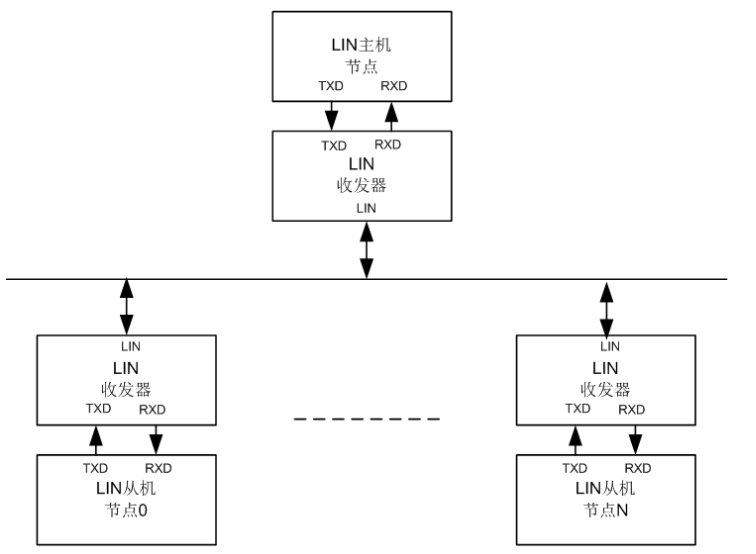
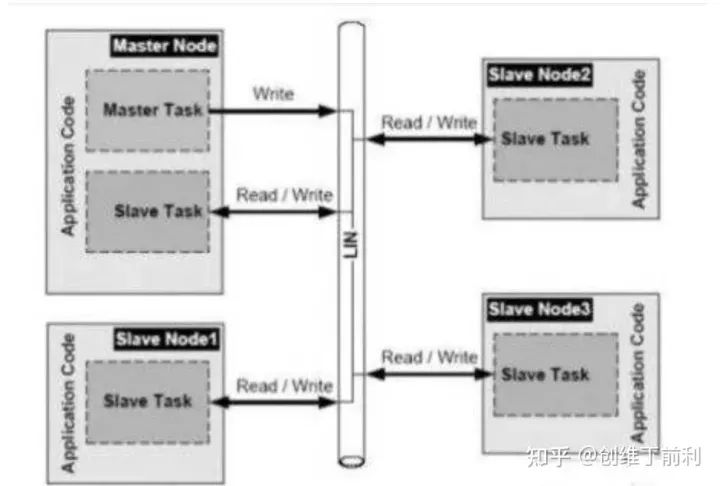
1、LIN總線的網絡結構
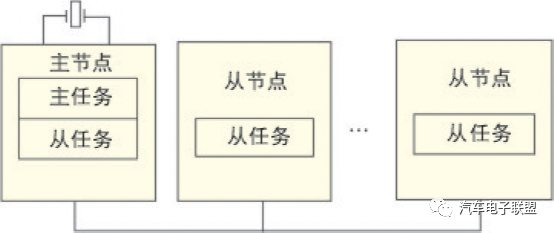
一個主節點,主節點可以執行主任務(引起LIN網絡通信)也可以執行從任務,總線上的信息傳送由主節點控制。主節點連接在CAN數據總線上
多個從節點,從節點只能執行從任務。
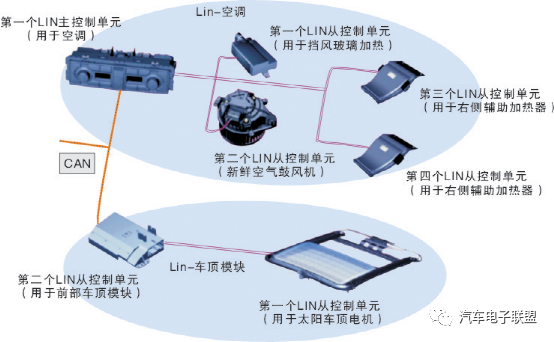
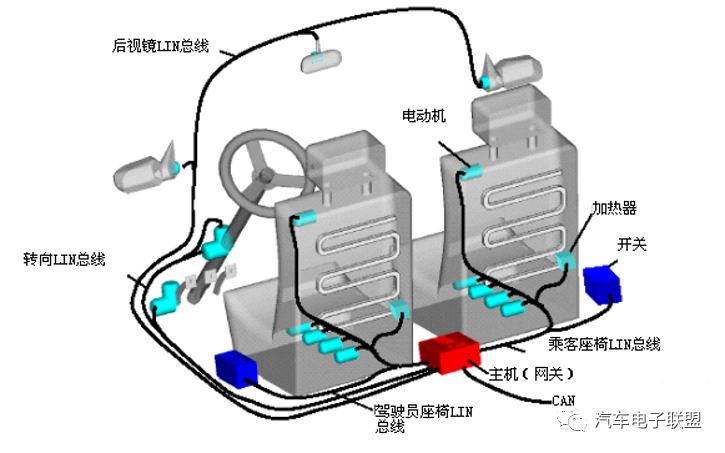
奧迪A6L轎車LIN總線內部組成示意圖
2、主節點(主控制單元)
LIN總線主控單元監控數據傳遞及其速率,發送信息標題
主控制單元的軟件內已設定了一個周期,這個周期用于決定何時將哪些信息發送到LIN數據總線上多少次
該控制單元在LIN數據總線與CAN總線之間起溝通作用(“翻譯”),它是LIN總線系統中唯一與CAN數據總線相連的控制單元
通過LIN主控制單元進行與之相連的LIN從控制單元的自診斷
3、從節點(從控制單元)
接收、傳遞或忽略與從主節點接收到的主任務(起始報文/信息標題)相關的數據
可以通過一個“叫醒”信號,喚醒主節點
檢查所接收數據總量和所發送數據的總量
同主節點的同步字節保持一致
只能按照主節點的要求同其他從節點進行數據交換
注意:只有當LIN主節點發送出主任務(起始報文或信息標題)后,從節點才會反應
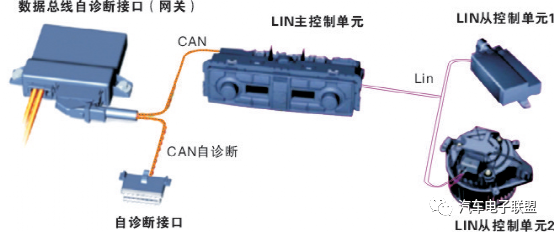
奧迪A6L轎車CAN LIN總線與從控制器示意圖
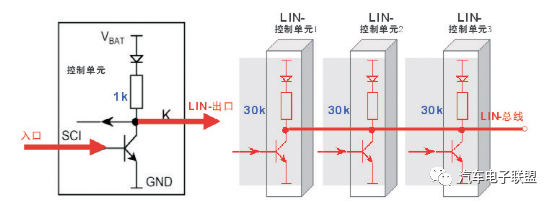
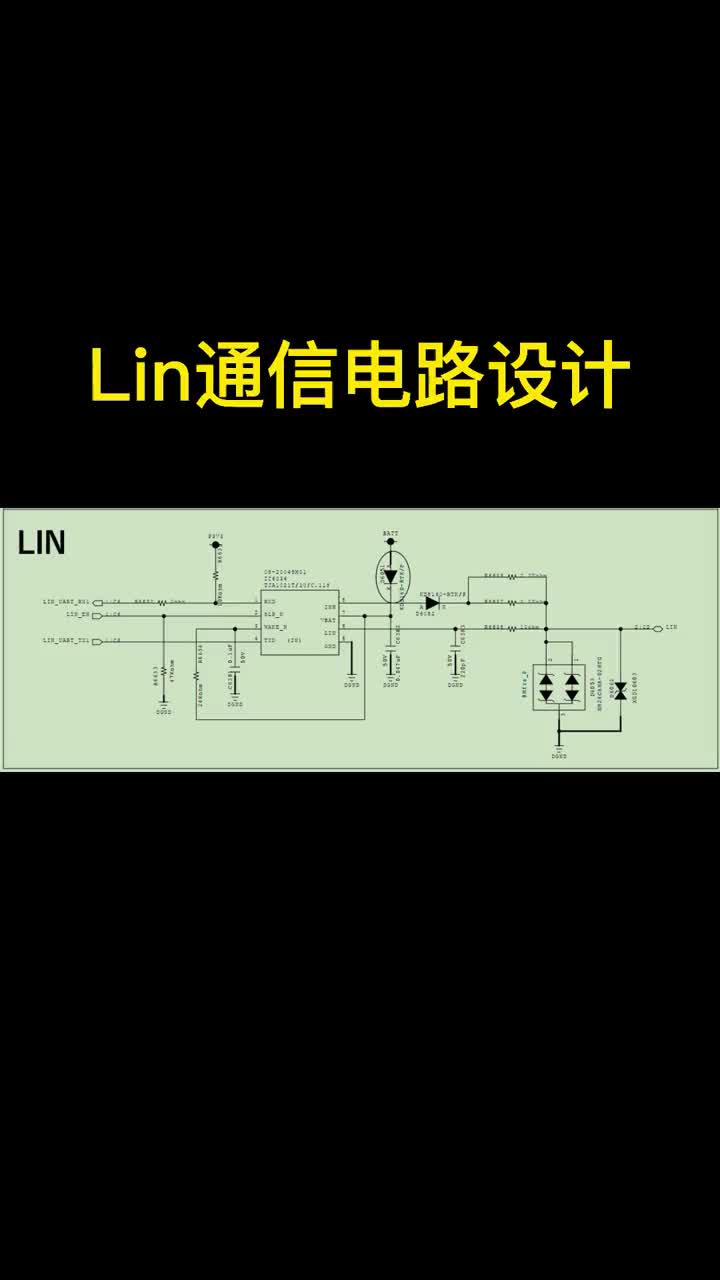
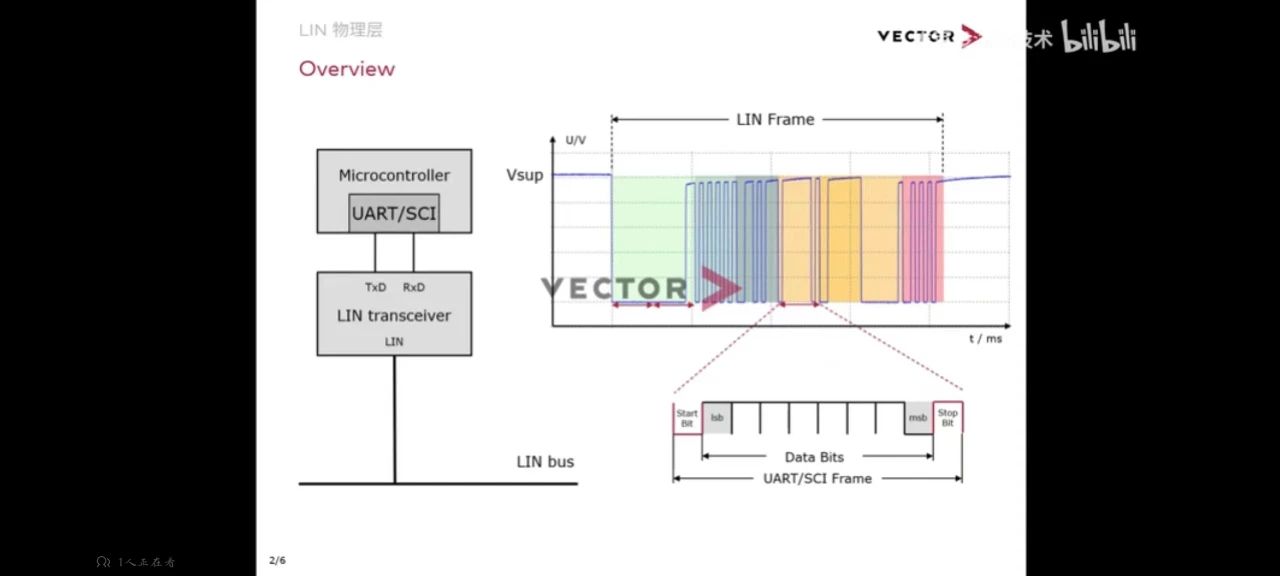
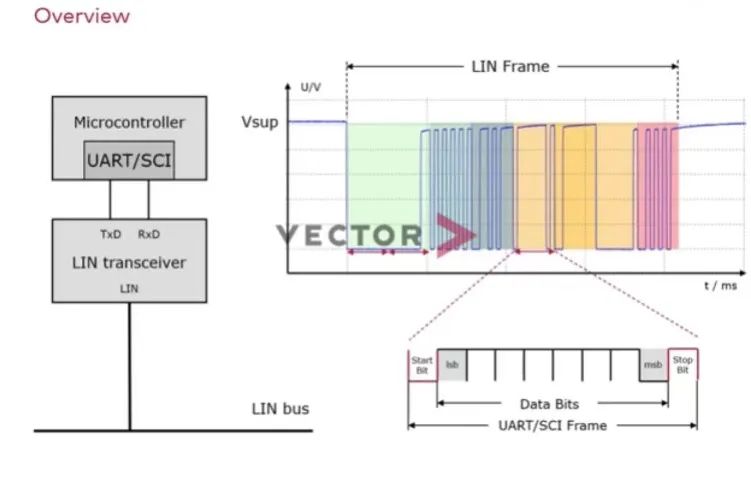
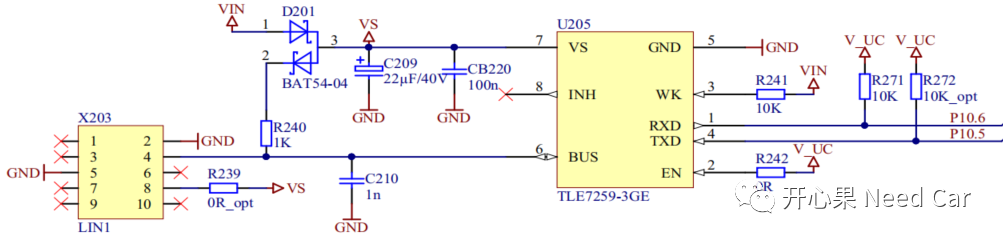
4、LIN總線的物理結構

三、LIN總線報文幀的類型
無條件幀:
攜帶數據信息;
事件觸發幀:
處理偶發的事件
偶發幀:
保證在調度表確定性的條件下為系統動態行為的靈活性而設定的
上述3中幀的報文標識符的范圍為0~59(0x3b)
診斷幀(命令幀、應答幀):
攜帶8個字節的診斷信息或組態信息,主節點診斷請求幀的標識符為60(0x3c),從節點診斷應答幀的標識符為61(0x3d)
用戶自定義幀:
可攜帶用戶自定義的任何信息,標識符為62(0x3e),在調度時可給用戶自定義幀分配報文幀時隙,每當時隙到來時發送用戶自定義幀的幀頭
保留幀:
保留幀標識符63(0x3f),在LIN2.0中沒有被使用
報文傳輸是由報文幀的格式表示和控制。
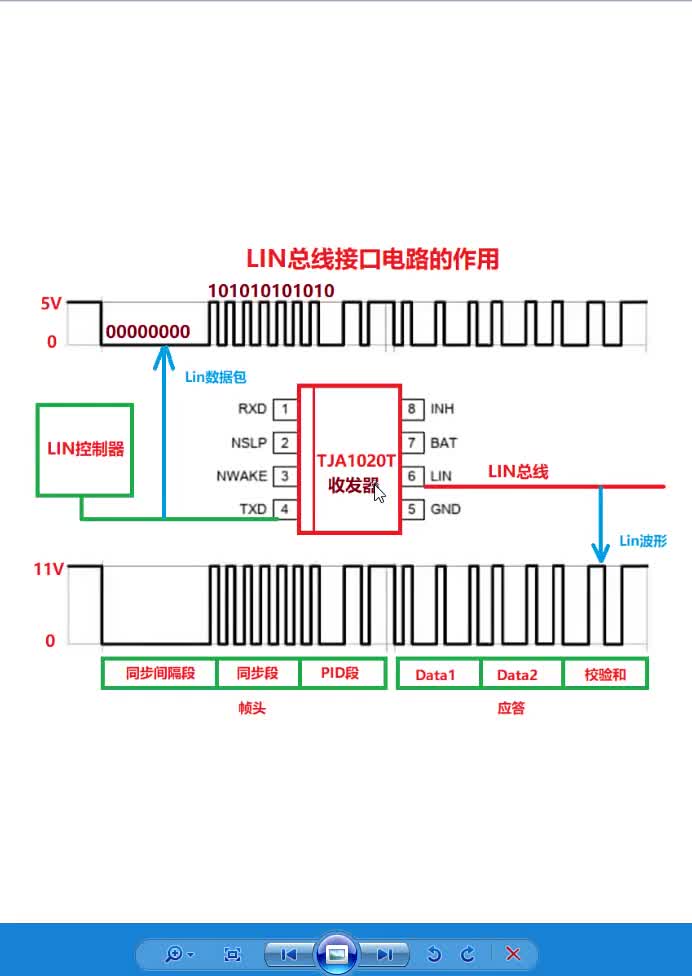
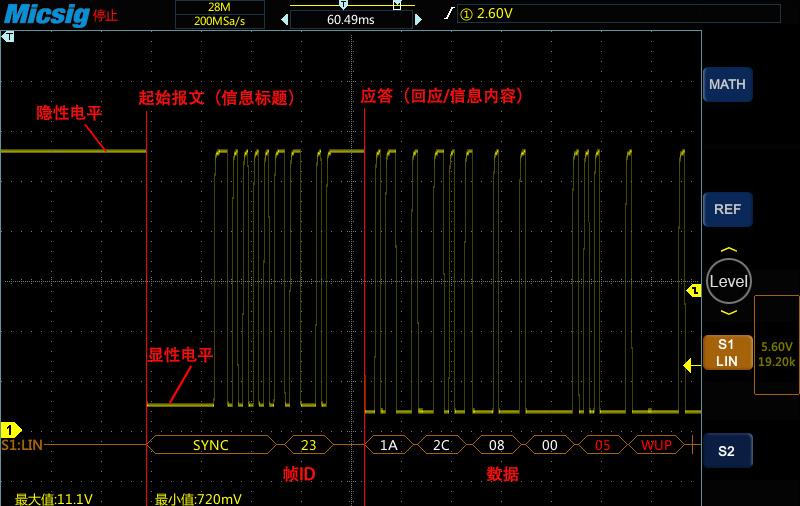
四、報文幀格式
一個主機節點發送的報文頭;
一個主機或從機節點發送的響應組成。
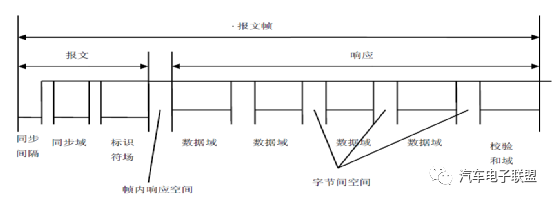
報文頭包含同步間隙、同步字節和報文標識符(0~63)
響應報文由1-9個字節構成:
其中2、4或8個字節的數據場和1個校驗和場。
報文幀之間有幀間間隔分隔;
報文與響應之間有幀內響應空間分隔;
最小幀間間隔和幀內響應空間均為0;
最大長度收到報文幀的最大長度FRAME_max限制。
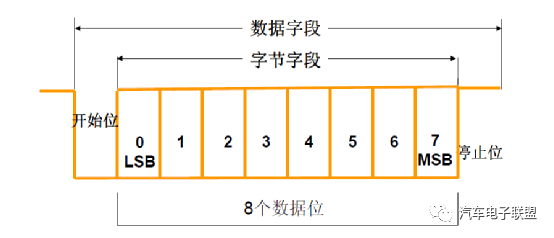
1、字節場
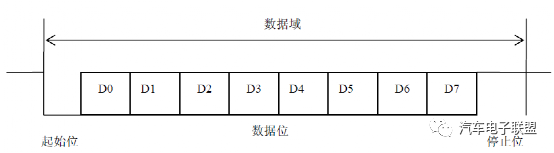
每一個字節場的長度由10個定時位定時(BIT TIME);
起始位(START BIT)是一個“顯性”位,標志字節的開始;
8為數據位,先發送最低位;
停止位(STOP BIST)是一個“隱性”位,標志著字節場的結束。
2、報文頭(HEADER FIELDS)
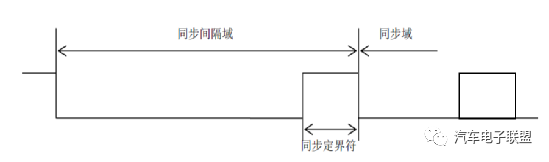
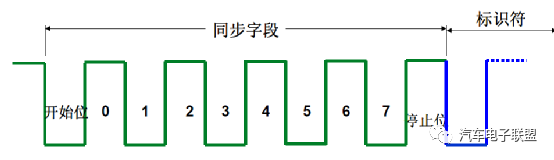
A、同步間隔(synchronisation break)
作用:
標識報文的開始,由主節點發送;使得所有的從機任務和總線時鐘信號同步。
同步間隔:
至少13bit的顯性位,之后緊隨至少1bit隱性值的同步界定符。
同步界定符的作用:
用來檢測接下來的同步域(Synch Field)的起始位。
B、同步場(SYNCH FIELD)
包含了時鐘的同步信息。格式為0x55,表現為8個位定時中有5個下降沿(隱性到顯性的跳變)
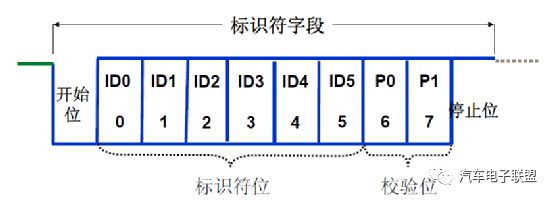
C、標識符場(IDENTIFIER FIELD)
6個標識符位(ID0~ID5)和2個標識符奇偶校驗位(P0 P1);
ID4和ID5定義了數據場的數據長度;
3、數據場(DATE FIELDS)
由多個8位的字節場組成,傳輸由LSB開始
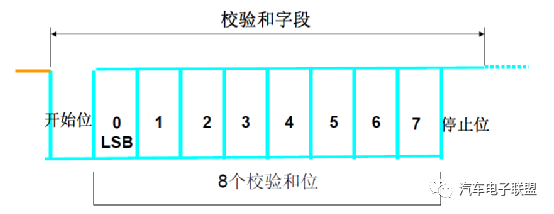
4、校驗和場(CHECK SUM FIELDS)
校驗和域是數據域所有字節的和的反碼。
校驗和按“帶進位加(ADDC)”方式計算,每個進位都被加到本次結果的最低位(LSB)。這就保證了數據字節的可靠性。
所有數據字節的和的補碼與校驗和字節之加的和必須是“0xFF”。
五、命令幀
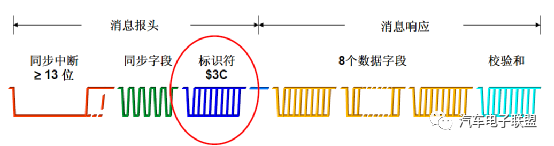
0x3C(ID 60)表示主節點請求幀(診斷幀),以便從主節點向從節點發送命令和數據。
0x3D(ID 61)表示從響應幀,該幀觸發從節點向主節點發送數據。
過程:
標識符為0x3c一個的“主機請求幀”,主機向從機發送數據和命令;標志符為0x3dD的“從機相應幀”觸發一個從機向主機發送數據。
命令幀中的第一個數劇場為0x00~0x7F, 其用法由LIN協會定義;
剩下的命令幀用戶可以自行分配.
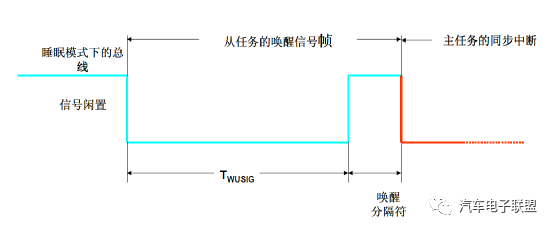
1、睡眠模式命令
總線有兩種狀態:
睡眠模式:從主節點發送睡眠模式命令后到總線上出現喚醒信號結束,沒有任何總線活動的這種模式。
喚醒模式:被喚醒信號喚醒之后的總線處于喚醒模式,可以有總線活動。
睡眠模式命令:
是第一個數據字節為0x00的命令幀
總線的睡眠模式可以通過任何節點的從任務發送一個喚醒幀來終止。
2、喚醒過程
某一個節點的從任務發送喚醒信號后,所有的節點都運行啟動過程
并等待主機任務發送一個同步間隔場和同步場;
若等待超時(TIME_OUT),請求第一個喚醒信號的節點再一次發送新的喚醒信號;
上述情況最多出現3次,此后,若還沒將總線喚醒,則等待3個TIME_OUT時間,再發送喚起信號。
六、用戶自定義幀
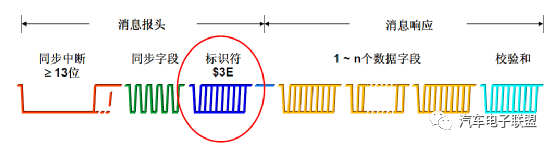
0x3E(ID 62)表示用戶定義的擴展幀,后跟任意數量的數據字節。
0x3F(ID 63)預留供將來使用。
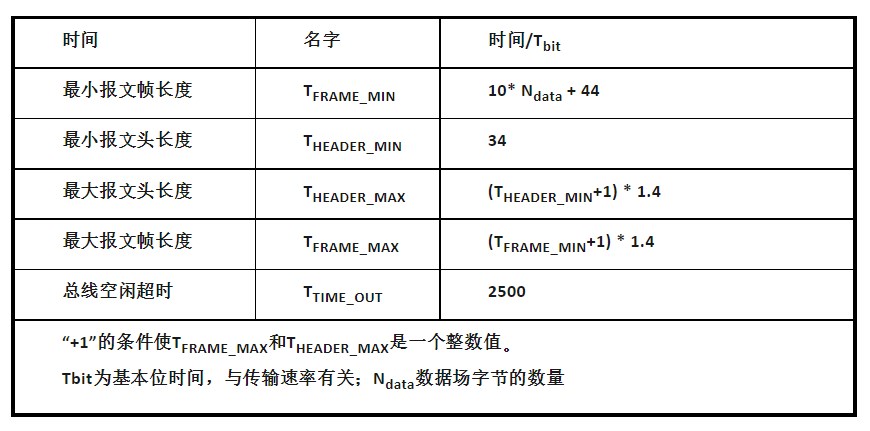
七、LIN總線的報文長度
報文幀以一個同步間隔作為開始,以校驗和域作為結束。
報文幀中的字節域用字節間空間和幀內響應空間分隔。
字節間空間和幀內響應空間的長度沒有定義,但限制了整個報文幀的長度。
最小的幀長度TFRAME_MIN是傳輸一個幀的所需要的最小時間(字節間空間和幀內響應空間應為0);
最大的幀長度TFRAME_MAX是傳輸一個幀的最大時間。
八、LIN的報文濾波和確認
1、報文濾波
LIN的報文濾波是基于標識符的,即每一個從機任務對應一個傳送標識符。
說明:用戶通過網絡配置保證任務和標識符間的對應關系
2、報文確認
如果直到幀的末尾均沒有檢測到錯誤,則此報文對于發送器和接收器都有效。
如果報文發生錯誤,則主機和從機任務都認為報文沒有發送。
注意:主機任務和從機任務在發送和接收到一個錯誤報文時所采取的措施,并沒有在協議規范中定義。像主機重新發送或從機的后退操作都由用戶按照應用要求在應用層程序中來實現,這些需要用戶在應用層中說明
九、LIN錯誤和異常處理:
1、錯誤檢測
A、位錯誤:
節點在發送時也監控總線,當監控到的位的值與發送的位的值不同時,則在這個位時間內檢測到一個錯誤。
B、校驗和錯誤:
所有數據字節的和的補碼與校驗和之和不是“0xFF”,則檢測到校驗和錯誤。
C、標識符奇偶錯誤
所有的從機節點都能區分 ID 場中 8 位都已知的標識 符和一個已知但錯誤的標識符。
D、從機不響應錯誤
如果任何主機任務在發送同步場和標識符后,在最大長度時間內TFRAME_MAX中沒有完成報文幀 的發送,則產生一個不響應錯誤。
E、同步場不一致錯誤
當從機檢測到同步場的邊沿在給出的容差外,則檢測到一個同步場不一致錯誤。
F、沒有總線活動
如果在接收到最后的一個有效信息后,在Ttime_out時間內沒有檢測到有效的同步間隔場和字節場,則檢測到一個沒有總線活動錯誤。
2、故障界定
故障界定主要依靠主節點,使它可以處理盡量多的錯誤檢測、錯誤回復和診斷。故障界定基于系統的要求,不是LIN協議內容。
主機控制單元要檢測以下錯誤狀態:
主機任務發送:
當回讀自己的發送時,在同步或標識符字節中的位錯誤、標識符奇偶錯誤和沒有總線活動錯誤需要被檢測。
主機節點的從機任務:
當期望或讀取來自總線上的數據時,從機不響應錯誤和校驗和錯誤被檢測。
從機控制單元需檢測以下錯誤情況:
從機任務發送:當回讀自己的發送時,數據或校驗和場中的位錯誤被檢測。
從機任務接受:當從總線讀取數據時,標識符奇偶錯誤和校驗和錯誤需被檢測。
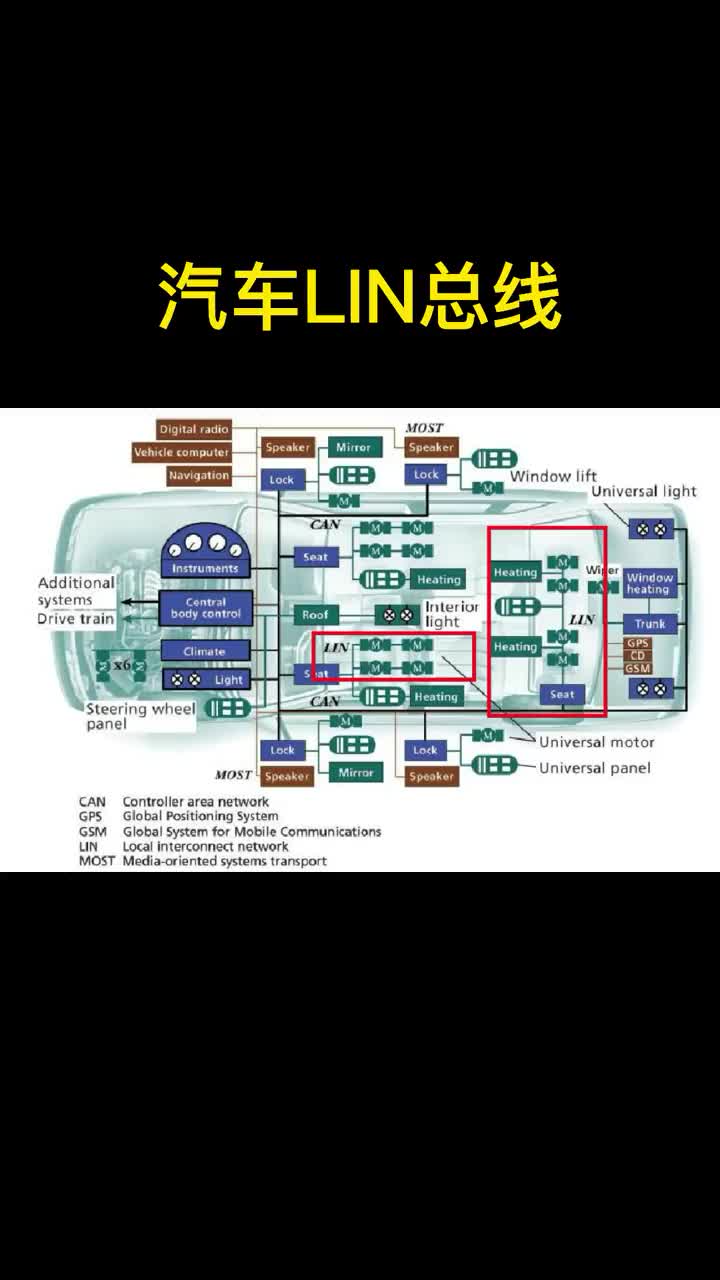
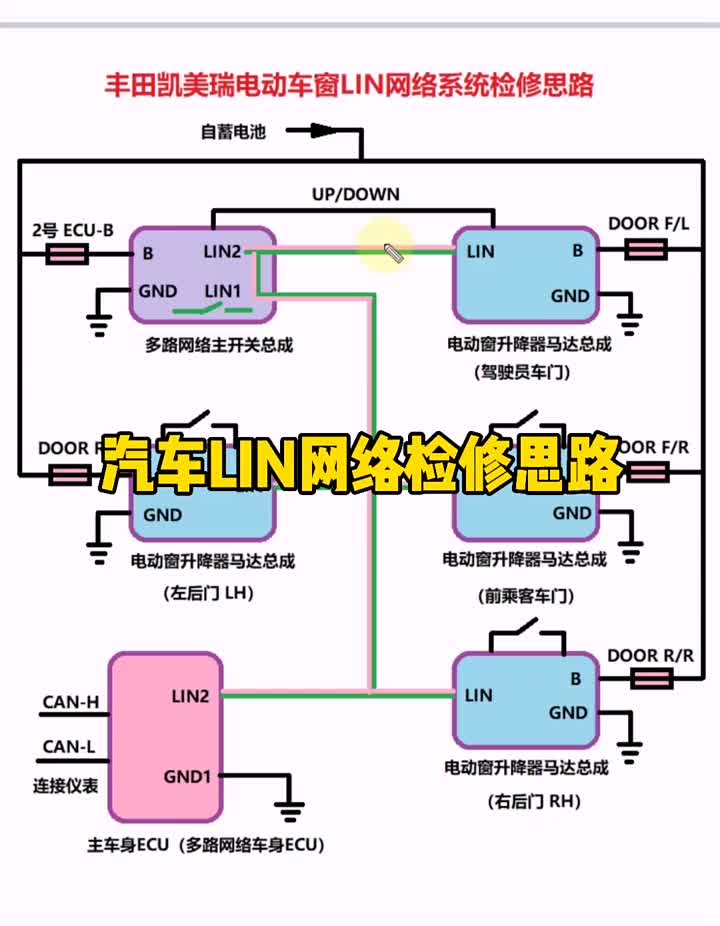
十、汽車上LIN總線的應用
現以車門LIN網絡為例介紹LIN總線設計的一般方法。
車門控制LIN網絡的結構及其在車門上的布置如右圖所示,該網絡由主機節點、后視鏡從機節點、搖窗機從機節點、門鎖從機節點構成。
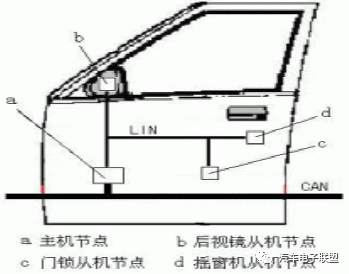
車門控制LIN網絡
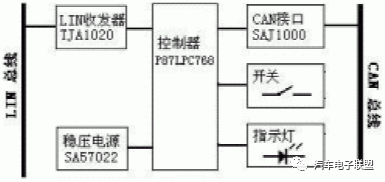
主機節點
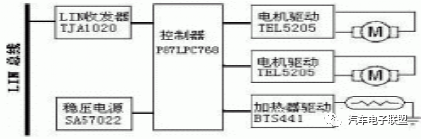
從機節點
主機節點采集本地各控制開關的狀態并接受CAN總線上的遠程信息,據此產生控制指令,并將指令轉換為LIN報文幀通過LIN網絡發送給相應從機節點,從機節點接收到與自己相關的報文幀后對報文幀進行拆封、解讀,然后根據獲得的指令控制相應的執行器動作,從而實現對車門各部件的控制。同時,在需要時從機節點分別將其控制部件所處狀態反饋給主機節點,主機節點再將該狀態信息通過指示燈或喇叭提供給駕駛員或通過CAN總線發送給其他控制單元。主機節點也作為本LIN網絡與上層CAN網絡連接的網關。
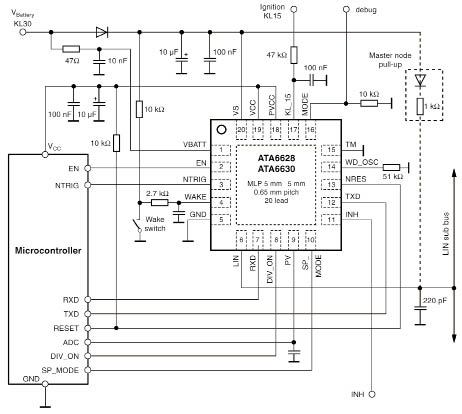
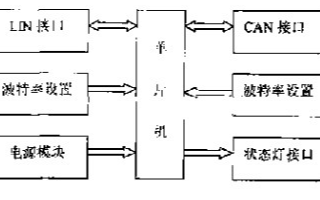
主機節點主要由控制器、電源、控制按鈕、LIN接口、CAN接口和指示燈幾部分組成。
后視鏡從機節點主要由控制器、電源、LIN接口、執行器驅動單元和執行器如后視鏡調整電機、除霜加熱器等組成。


















 工商網監
工商網監
評論