 電子發(fā)燒友App
電子發(fā)燒友App


摘要
在過(guò)去的二十年中,汽車軟件的需求和應(yīng)用急劇增長(zhǎng),隨之復(fù)雜性急劇上升,現(xiàn)有技術(shù)和框架不足以應(yīng)對(duì)這種復(fù)雜性。現(xiàn)在很明顯,汽車制造商(OEM)必須重新考慮他們生產(chǎn)車輛的方式以及車輛本身的生命周期。通過(guò)將重點(diǎn)放在軟件上,OEM可以在車輛整個(gè)生命周期中實(shí)現(xiàn)許多新的應(yīng)用用例,并打開一個(gè)充滿機(jī)遇的新世界。
一
軟件定義汽車以及虛擬化技術(shù)
1.1?軟件定義汽車的概念
移動(dòng)出行時(shí)代,汽車已逐漸從純粹由機(jī)械驅(qū)動(dòng)的硬件轉(zhuǎn)變?yōu)檐浖?qū)動(dòng)的電子產(chǎn)品。當(dāng)今不同車廠的產(chǎn)品硬件配置已逐漸趨同,在成本和功能改善空間有限的情況下,傳統(tǒng)汽車價(jià)值鏈的重構(gòu)勢(shì)在必行。車廠打造差異化的核心要素已轉(zhuǎn)向原先與硬件深度耦合的汽車軟件,隨著汽車軟件在新能源和智能化領(lǐng)域不斷取得成功,邁入“軟件定義汽車(Software Defined Vehicles,SDV)”時(shí)代已成為行業(yè)共識(shí)。
“軟件定義汽車”即軟件將深度參與到汽車的定義、開發(fā)、驗(yàn)證、銷售、服務(wù)等過(guò)程中,并不斷改變和優(yōu)化各個(gè)過(guò)程,是汽車從基于硬件的產(chǎn)品向軟件為中心的電子設(shè)備不斷轉(zhuǎn)變的結(jié)果。
“軟件定義汽車”?從表面上看是車內(nèi)軟件(包括電子硬件)的數(shù)量、價(jià)值超過(guò)機(jī)械硬件,背后更多的反應(yīng)了汽車從高度機(jī)電一體化的機(jī)械終端,逐步轉(zhuǎn)變?yōu)橐粋€(gè)智能化、可拓展、可持續(xù)迭代升級(jí)的移動(dòng)電子終端。為實(shí)現(xiàn)這一目標(biāo),整車在標(biāo)準(zhǔn)操作程序前便預(yù)埋了性能超前的硬件,并通過(guò)OTA在生命周期中逐步解鎖和釋放功能和價(jià)值。在該背景下,主機(jī)廠的核心能力將從機(jī)械硬件轉(zhuǎn)向電子硬件和軟件;產(chǎn)業(yè)價(jià)值鏈也將從一錘子硬件銷售轉(zhuǎn)向持續(xù)的軟件及服務(wù)溢價(jià)。
1.2?汽車軟件發(fā)展的趨勢(shì)

汽車“新四化”離不開軟件和算法隨著新四化的深入發(fā)展,汽車正加速?gòu)膹臋C(jī)械設(shè)備向高度數(shù)字化、信息化的智能終端轉(zhuǎn)變。
首先,軟件及汽車電子占整車的研發(fā)成本逐步提高,車內(nèi)軟件和電子硬件價(jià)值有望超過(guò)硬件,成為整車價(jià)值的核心。據(jù)測(cè)算,預(yù)計(jì)到2030年軟件成本占整車BOM(物料清單,Bill Of Material)的比重將從目前不到10%增長(zhǎng)到50%。需指出的是,這里的軟件除應(yīng)用程序開發(fā)、還包括AI算法、操作系統(tǒng),以及軟硬件一體化程度高的控制器、芯片等電子硬件。
其次,軟件及軟件更迭所帶來(lái)的性能和功能變化,將決定未來(lái)汽車的差異性。軟件的更新維護(hù)是未來(lái)主機(jī)廠提供差異化體驗(yàn)、提升客戶滿意度最經(jīng)濟(jì)、最便捷、最快速的一種方式。前提是由硬件提供冗余,再由軟件實(shí)現(xiàn)迭代。
最后,包括主機(jī)廠、零部件企業(yè)等產(chǎn)業(yè)鏈上企業(yè)將加強(qiáng)軟件能力建設(shè),并圍繞“軟件定義汽車”開啟從產(chǎn)品開發(fā)模式、組織架構(gòu)、人員構(gòu)成、運(yùn)營(yíng)體系等的內(nèi)部變革。此外,新興的軟件公司將借助軟硬件協(xié)同能力,兼容產(chǎn)業(yè)鏈上下多方需求,一舉躍升為汽車產(chǎn)業(yè)鏈上新的Tier-1企業(yè)。
1.3 汽車研發(fā)面臨的困局
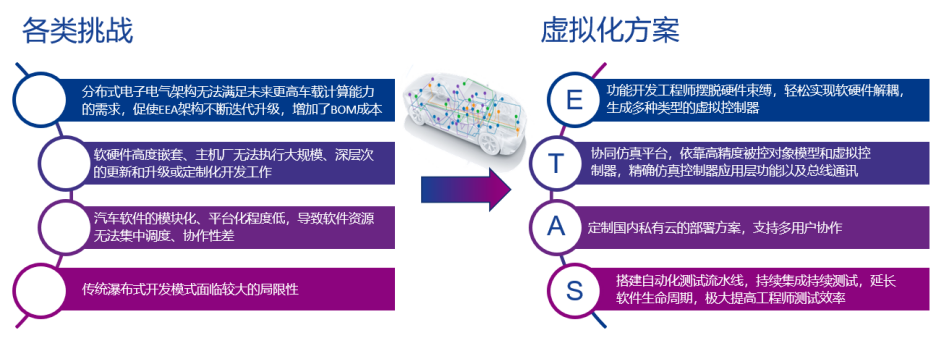
首先,分布式電子電氣架構(gòu)無(wú)法滿足未來(lái)更高車載計(jì)算能力的需求。驅(qū)使EEA架構(gòu)升級(jí)的另一個(gè)推動(dòng)因素來(lái)自于更高的通訊效率和更大的帶寬容量需求。成本管控黑洞:隨著車內(nèi)ECU、傳感器數(shù)量增加,整車線束成本和布線難度也跟著大幅提升。
另外,汽車軟件的模塊化、平臺(tái)化程度低,導(dǎo)致軟件資源無(wú)法集中調(diào)度、協(xié)作性差。主機(jī)廠的ECU通常來(lái)自于不同的零部件供應(yīng)商,事實(shí)上控制器上許多底層軟件的重復(fù)性很高,這些代碼主要保障控制器的正常運(yùn)行,例如CAN總線信號(hào)的收發(fā)、任務(wù)進(jìn)程的調(diào)度、Flash數(shù)據(jù)的讀寫等等。但礙于每一家供應(yīng)商的軟件編程語(yǔ)言不同、接口標(biāo)準(zhǔn)不同,而且軟件又和硬件高度依賴,使得這些底層代碼無(wú)法被復(fù)制和移植,從而造成ECU軟件開發(fā)的大量重復(fù)和資源利用的低效。
其次,軟硬件高度嵌套、主機(jī)廠無(wú)法執(zhí)行大規(guī)模、深層次的更新和升級(jí)或定制化開發(fā)工作。分布式軟件架構(gòu)是一種面向信號(hào)的架構(gòu),控制器之間通過(guò)信號(hào)來(lái)傳遞信息,但整個(gè)系統(tǒng)是封閉、靜態(tài)的,在編譯階段就被定義死,因此當(dāng)發(fā)生例如主機(jī)廠要修改或增加某個(gè)控制器的功能定義,同時(shí)該指令還必須調(diào)用另一個(gè)控制器上的功能時(shí),就不得不把所有需要的控制器都升級(jí),大大延長(zhǎng)開發(fā)周期、增加開發(fā)成本。
1.4 研發(fā)模式的轉(zhuǎn)變
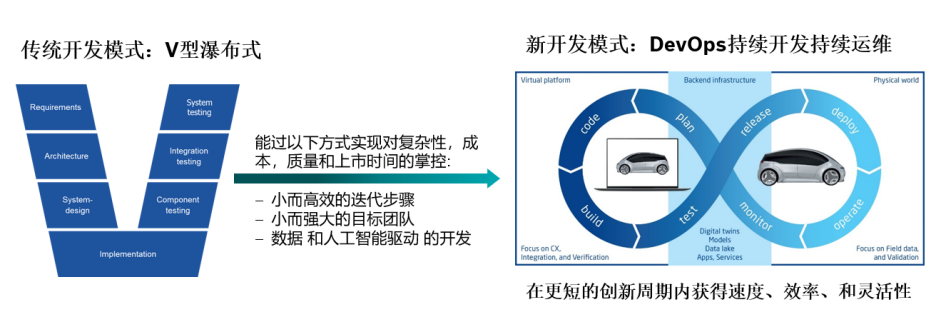
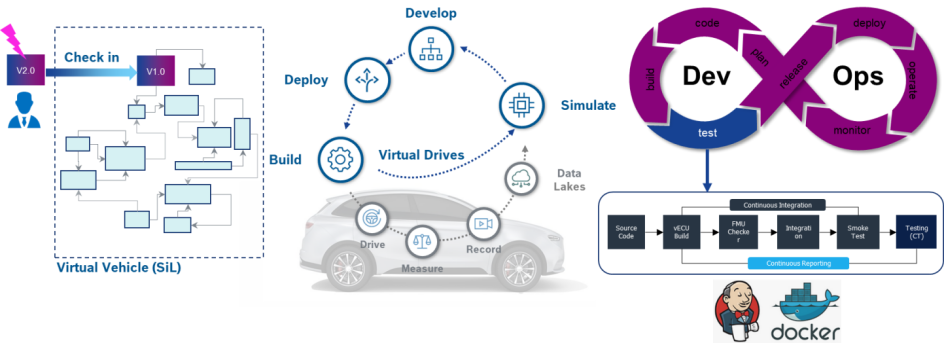
基于以上技術(shù)架構(gòu)方面的變化,在軟件定義汽車的背景下,汽車研發(fā)將由傳統(tǒng)的瀑布式開發(fā)向敏捷開發(fā)的模式轉(zhuǎn)變。
敏捷軟件開發(fā)(Agile software development):包括需求發(fā)現(xiàn)和解決方案改進(jìn)。該模式通過(guò)自組織和跨職能團(tuán)隊(duì)與用戶協(xié)作,制定適應(yīng)性計(jì)劃,進(jìn)行漸進(jìn)開發(fā)、早期交付、持續(xù)改進(jìn),靈活應(yīng)對(duì)需求、能力的變化以及對(duì)需要解決問題的理解的變化。這是一種以用戶需求進(jìn)化為核心的迭代、循序漸進(jìn)的開發(fā)方法。工程師先將用戶最關(guān)注的軟件原型做出來(lái)進(jìn)行交付,根據(jù)用戶在實(shí)際場(chǎng)景中反饋的問題,快速修改彌補(bǔ)需求中的不足。上述過(guò)程不斷迭代,直至用戶滿意。
DevOps是一組過(guò)程、方法和系統(tǒng)的統(tǒng)稱,集文化理念、實(shí)踐、工具于一身,重視開發(fā)(Dev)和運(yùn)維(Ops)和質(zhì)量(QA)部門之間的溝通合作。
與傳統(tǒng)軟件開發(fā)模式系相比,DevOps打破了開發(fā)和運(yùn)維之間的壁壘,通過(guò)自動(dòng)化“軟件交付”和“架構(gòu)變更”的流程,使得軟件的構(gòu)建、測(cè)試和發(fā)布能更加快捷、頻繁和可靠,從而幫助團(tuán)隊(duì)更快地發(fā)展和改進(jìn)產(chǎn)品、服務(wù)客戶、高效參與市場(chǎng)競(jìng)爭(zhēng)。
1.5 虛擬化的價(jià)值
汽車軟件開發(fā)將遵循IT行業(yè)的發(fā)展規(guī)律,引入中間件技術(shù)、虛擬化技術(shù)來(lái)實(shí)現(xiàn)軟件模塊化、硬件抽象化和標(biāo)準(zhǔn)化,從而進(jìn)一步解鎖軟硬件的耦合關(guān)系,滿足電子電氣架構(gòu)靈活、可拓展的需求。
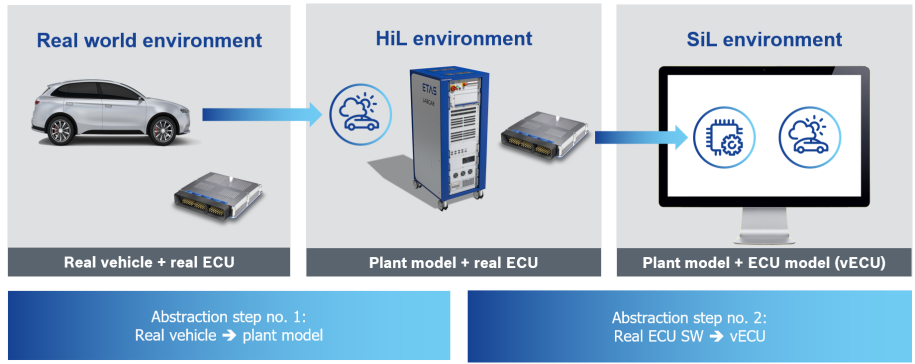
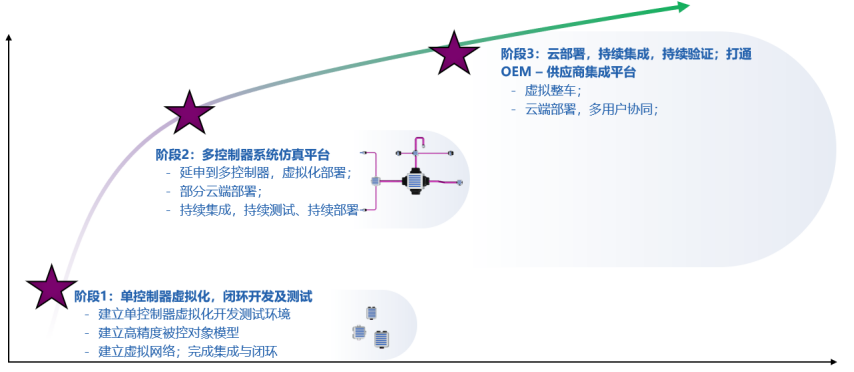
為應(yīng)對(duì)流程轉(zhuǎn)變上的挑戰(zhàn),開發(fā)團(tuán)隊(duì)可考慮將軟硬件解耦后,硬件和軟件部分各自按照獨(dú)立時(shí)間線來(lái)開發(fā),并在進(jìn)行軟件更改后無(wú)需對(duì)整個(gè)車輛進(jìn)行重新驗(yàn)證,純軟件的開發(fā)和驗(yàn)證過(guò)程從原型車或者硬件在環(huán)測(cè)試過(guò)渡到軟件在環(huán)(SiL)的測(cè)試和驗(yàn)證。這種軟硬解耦的方式同時(shí)也迎合了當(dāng)下將ECU功能整合到中央計(jì)算單元或域控制器的趨勢(shì),在多合一控制器融合的過(guò)程中發(fā)揮作用,軟硬件模塊可以在不同的硬件平臺(tái)運(yùn)行,并在車輛整個(gè)生命周期內(nèi)更新。
那么軟件在環(huán)SiL有什么應(yīng)用場(chǎng)景呢?其應(yīng)用場(chǎng)景通常是在快速變更的功能需求下敏捷開發(fā)及快速迭代。要求盡早進(jìn)行軟件驗(yàn)證并發(fā)現(xiàn)和糾正代碼中的重要錯(cuò)誤,特別是涉及安全相關(guān)錯(cuò)誤。在高頻率OTA云端升級(jí)軟件的情況下自動(dòng)化持續(xù)驗(yàn)證。在以上場(chǎng)景下軟件在環(huán)SIL測(cè)試能夠脫離硬件而快速驗(yàn)證控制器的功能代碼。
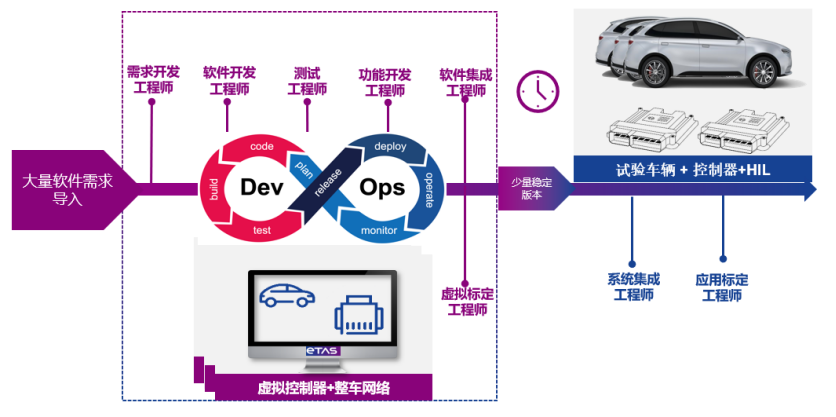
軟件在環(huán)SiL的最關(guān)鍵的一個(gè)核心就是虛擬化:即通過(guò)將真實(shí)控制器轉(zhuǎn)化為虛擬控制器,部署到PC上集成環(huán)境和聯(lián)合仿真平臺(tái),接入CI/CT/CD自動(dòng)化流水線,并上云端進(jìn)行大規(guī)模測(cè)試,從而搭建完整的DevOps的SiL平臺(tái)。
虛擬化技術(shù)使得在Windows PC上對(duì)汽車ECU(Electronic Control Unit,電子控制器單元)進(jìn)行閉環(huán)仿真成為可能,能有效改善ECU開發(fā)過(guò)程。一些開發(fā)任務(wù)得以從道路、測(cè)試平臺(tái)和HIL(Hardware in the Loop,硬件在環(huán))轉(zhuǎn)移到PC上,縮短開發(fā)時(shí)間和成本。
從OEM的視角來(lái)看虛擬化,可以將軟件測(cè)試前移到早期開發(fā)階段閉環(huán),既減少了項(xiàng)目初期昂貴的BOM成本,又降低了軟件開發(fā)成本和時(shí)間,在實(shí)現(xiàn)軟件CICT閉環(huán)自動(dòng)化的同時(shí),可以建立供應(yīng)商之間的發(fā)展生態(tài)系統(tǒng),進(jìn)行多團(tuán)隊(duì)多租戶并行工作。
從工程師的視角來(lái)看虛擬化,傳統(tǒng)汽車軟件開發(fā)的流程一般為:功能開發(fā)團(tuán)隊(duì)使用基于模型的工具鏈開發(fā)ECU模型,生成C代碼,然后針對(duì)目標(biāo)處理器進(jìn)行代碼編譯,并使用測(cè)試平臺(tái),HiL系統(tǒng)和道路測(cè)試來(lái)測(cè)試和驗(yàn)證生成的ECU,進(jìn)而將結(jié)果反饋至開發(fā)人員,結(jié)束開發(fā)周期。該過(guò)程存在的主要缺點(diǎn)有:迭代時(shí)間長(zhǎng),受原型車和測(cè)試設(shè)備的限制—硬件資源昂貴且稀缺。
為開發(fā)團(tuán)隊(duì)提供虛擬ECU可解決上述問題:開發(fā)人員可在PC機(jī)上對(duì)軟件進(jìn)行模擬、校準(zhǔn)和測(cè)量,縮短開發(fā)周期,減少對(duì)稀缺資源和實(shí)際硬件的嚴(yán)重依賴;同時(shí),通過(guò)虛擬ECU,開發(fā)人員可隨時(shí)觀察和修改內(nèi)存變量甚至硬件狀態(tài),極大提升工作效率。

二
vECU虛擬控制器集成
2.1 虛擬控制器的介紹
虛擬控制器簡(jiǎn)稱vECU (即Virtual ECU),表示脫離真實(shí)硬件依賴后基于PC獨(dú)立編譯和運(yùn)行的軟件,vECU所包含的內(nèi)容通常可由ASW,vBSW,vCDD以及RTE這幾個(gè)部分構(gòu)成,在集成編譯后封裝成基于PC的可執(zhí)行文件。
對(duì)于功能測(cè)試驗(yàn)證工程師,通常他會(huì)拿到一個(gè)帶有軟件的完整ECU控制器,并以硬件在環(huán)或?qū)嵻嚟h(huán)境作為測(cè)試環(huán)境進(jìn)行測(cè)試,整個(gè)測(cè)試過(guò)程可能受硬件和線束的限制,每當(dāng)遇到軟件的失效時(shí)首先需要考慮線束或者硬件通信上的問題,長(zhǎng)此以往測(cè)試效率通常受硬件資源和硬件狀態(tài)的限制,難以在受限的條件下高效的完成測(cè)試。但是如果僅ECU內(nèi)與硬件無(wú)關(guān)的功能,只需解耦ECU產(chǎn)品代碼并封裝成vECU運(yùn)行在PC上進(jìn)行測(cè)試即可。數(shù)據(jù)采集和驗(yàn)證過(guò)程同真實(shí)環(huán)境軟件測(cè)試工具一致,如INCA、Debugger調(diào)試器等等。
而對(duì)于功能開發(fā)工程師來(lái)說(shuō),驗(yàn)證功能時(shí)需要在完整ECU軟件上進(jìn)行集成并驗(yàn)證功能,該集成過(guò)程通常由軟件集成工程師負(fù)責(zé),軟件集成該功能同時(shí)還需要考慮ECU 平臺(tái)化升級(jí)、底層芯片配置等諸多因素導(dǎo)致迭代效率低下的問題。其實(shí)對(duì)于其生成的ECU功能代碼,依然可以將這一部分代碼封裝成一個(gè)部分功能的vECU并進(jìn)行仿真測(cè)試。并且你可以在任意時(shí)間終止仿真并進(jìn)行Debug,還可以在功能驗(yàn)證過(guò)程中根據(jù)需要對(duì)vECU做預(yù)標(biāo)定從而提前驗(yàn)證預(yù)設(shè)標(biāo)定數(shù)據(jù)。
簡(jiǎn)而言之,就是將控制器C代碼基于PC環(huán)境編譯后生成FMU格式的可執(zhí)行文件運(yùn)行在常規(guī)PC仿真環(huán)境上,以更早和更快的方式進(jìn)行測(cè)試及調(diào)試。
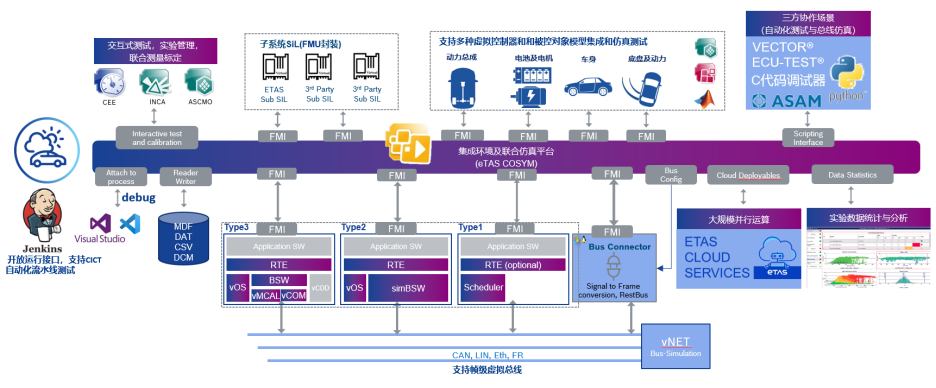
2.2 虛擬控制器的分類
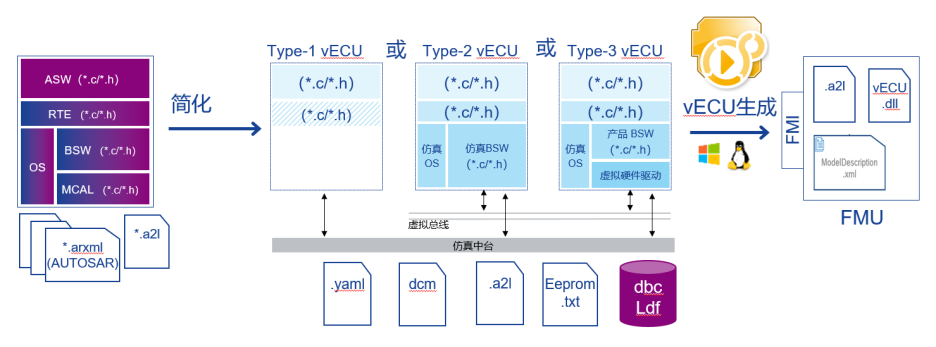
生成虛擬控制器的方式有兩種,一種是通過(guò)C源碼經(jīng)過(guò)PC的x86編譯器后生成可以運(yùn)行在PC上vECU目標(biāo)文件,并于PC上進(jìn)行系統(tǒng)測(cè)試和驗(yàn)證后反饋給研發(fā)工程師。另一種是將C源碼編譯成目標(biāo)芯片的程序(hex文件)后,運(yùn)行在目標(biāo)芯片的指令模擬器上來(lái)進(jìn)行系統(tǒng)測(cè)試后再將結(jié)果反饋給研發(fā)工程師。
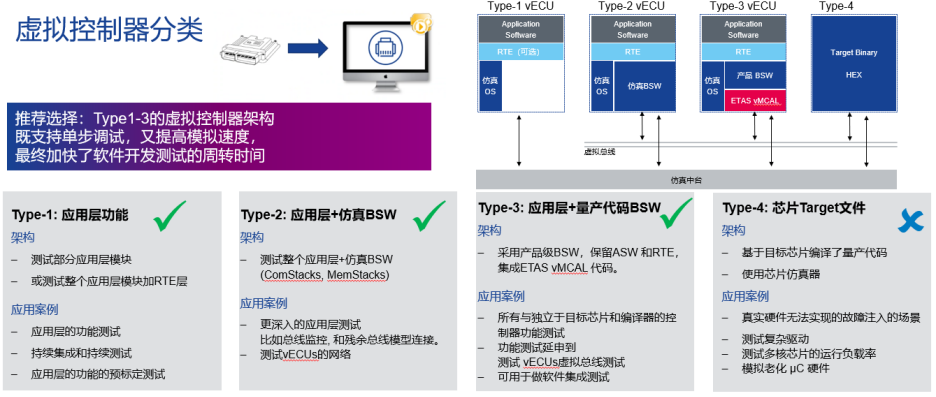
如上圖所示,Type-1 vECU, ?Type-2 vECU, Type-3 vECU為第一類通過(guò)C源碼的構(gòu)建方式生成的vECU,Type-4為第二類通過(guò)目標(biāo)程序運(yùn)行在目標(biāo)芯片指令模擬器的方式實(shí)現(xiàn)vECU。
Type-4 vECU雖然可執(zhí)行的是同一個(gè)目標(biāo)hex文件,但緩慢的運(yùn)行效率及芯片迭代所帶來(lái)大量工程服務(wù)來(lái)屏蔽當(dāng)前ECU項(xiàng)目的部分二進(jìn)制控制指令,當(dāng)前大部分用戶仍會(huì)采用基于PC編譯器Type1 Type2 和Type3的方式。基于PC編譯器編譯控制器C代碼的諸多優(yōu)勢(shì),比如:vECU 的更快的運(yùn)行效率、仿真時(shí)的在線Debug、解耦真實(shí)硬件以及對(duì)實(shí)驗(yàn)結(jié)果更快的反饋時(shí)間。?
雖然采用vECU來(lái)驗(yàn)證有諸多優(yōu)勢(shì),但用其進(jìn)行測(cè)試和仿真時(shí)仍有一定限制,比如無(wú)法評(píng)估和分析諸如軟件上的時(shí)間表現(xiàn)、CPU負(fù)載、內(nèi)存資源的消耗以及模擬硬件中斷等特性。
2.3 FMU介紹
FMU是對(duì)動(dòng)態(tài)鏈接庫(kù)DLL進(jìn)行的二次封裝,它是基于FMI協(xié)議進(jìn)行封裝的模型文件。FMI協(xié)議是獨(dú)立于建模軟件的標(biāo)準(zhǔn)接口協(xié)議,可以用于集成不同的軟件建立的不同詳細(xì)程度的模型,進(jìn)行MiL/SiL仿真。
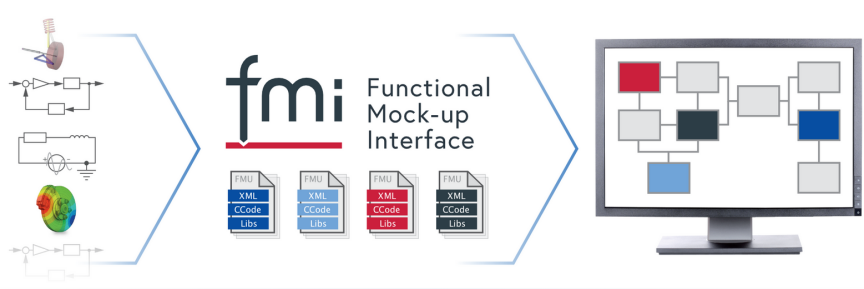
FMI的全稱叫Functional Mockup Interface 。FMI是為了仿真領(lǐng)域定義的。FMI 定義了二進(jìn)制的標(biāo)準(zhǔn)格式仿真模型交換。FMU 數(shù)學(xué)模型的代碼實(shí)現(xiàn)就是將提供的 C 頭文件里面定義的函數(shù)都實(shí)現(xiàn),如果需要做到源碼保密,則將其封裝成動(dòng)態(tài)鏈接庫(kù) .dll 就行。
一般商業(yè)化的仿真工具比如 CarSim、CarMaker 、AVL Cruise、Amesim和Simulink 、ASCET等都由官方提供 FMU。在 FMI 官網(wǎng)上列出了目前提供了 FMU 的軟件可以在以下路徑找到https://fmi-standard.org/
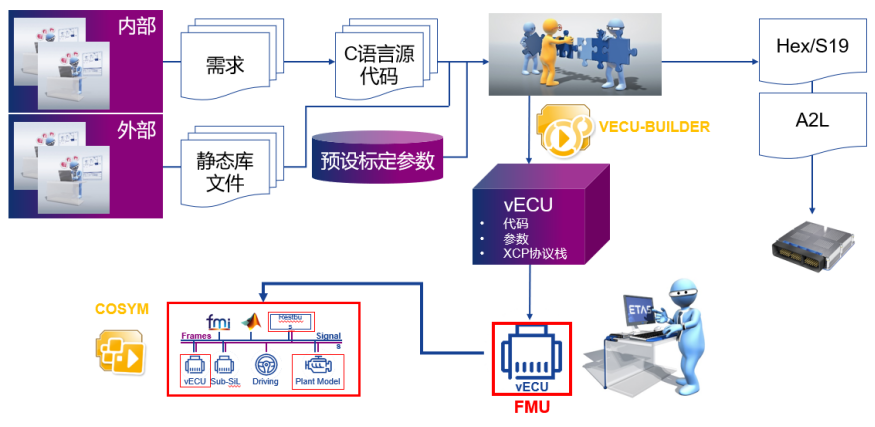
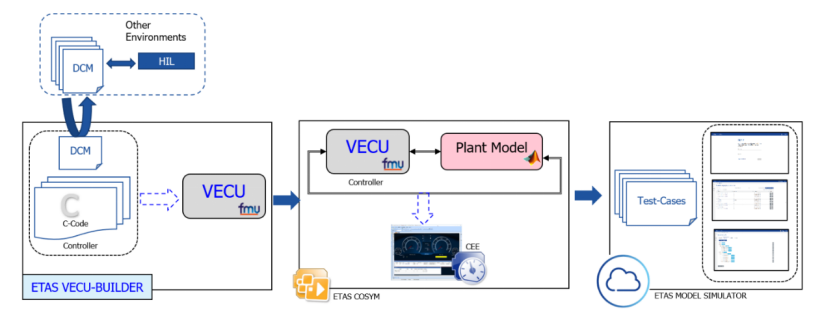
2.4?vECU自動(dòng)化生成流程
以ETAS的VECU-BUILDER為例,這是一個(gè)基于Python和CMake的Windows工具。
為了創(chuàng)建一套生成PC Target的虛擬控制器FMU 文件,我們需要有一套軟件集成和編譯工具鏈:自動(dòng)化vECU編譯工具鏈。這個(gè)工具鏈需要一旦配置完成后,可實(shí)現(xiàn)一鍵生成虛擬控制器。
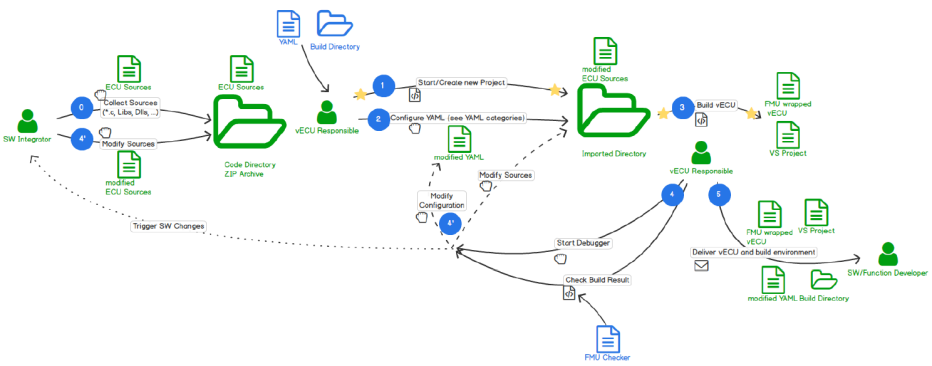
初次生成vECU工作流程:
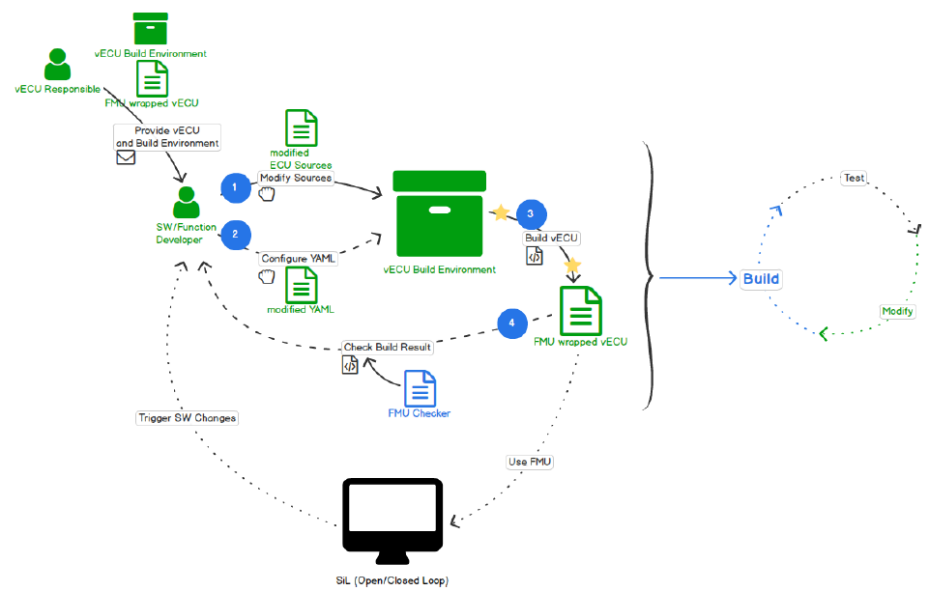
Rebuild生成vECU工作流程:
三
集成環(huán)境及聯(lián)合仿真
下面介紹一下關(guān)于FMU的集成環(huán)境和聯(lián)合仿真平臺(tái)。
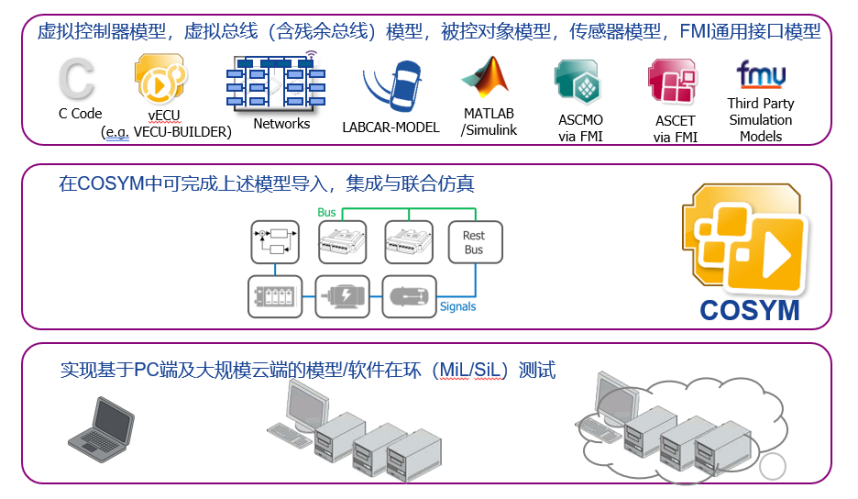
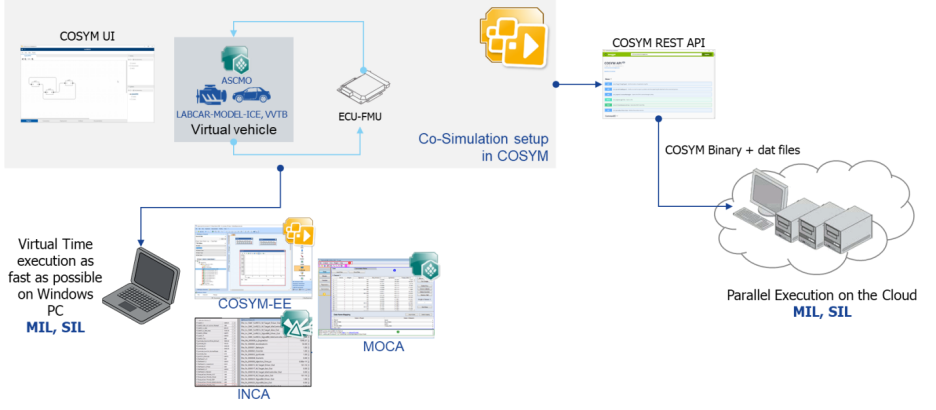
3.1 COSYM介紹
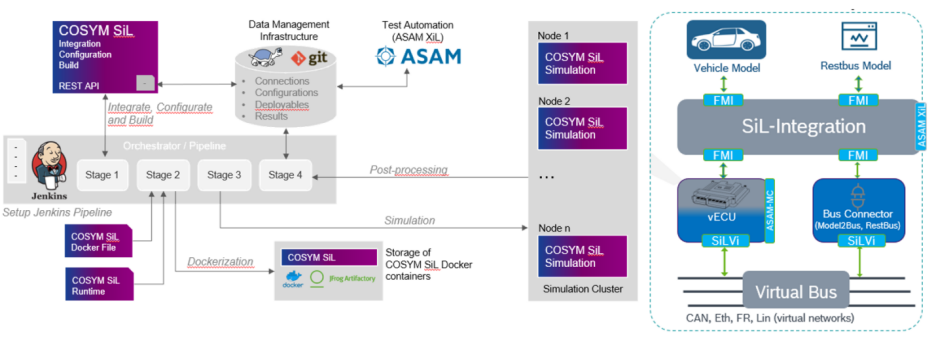
COSYM(系統(tǒng)協(xié)同仿真)產(chǎn)品是一個(gè)仿真和集成平臺(tái),作為系統(tǒng)級(jí)軟件在環(huán)的主干,能夠方便支持ECU間通信,并使能OEM廠商成為虛擬車輛集成商。一旦OEM廠商開發(fā)了自有的構(gòu)建模塊庫(kù),將能夠方便采用COSYM進(jìn)行模塊集成與連接,使能控制器之間精確地通信。COSYM具有?“時(shí)序主控”?,能夠協(xié)調(diào)所集成模塊時(shí)間同步。?
COSYM提供了圖形配置界面(GUI)和實(shí)時(shí)操作環(huán)境(CEE),以實(shí)現(xiàn)有效的用戶交互。旨在為用戶提供:
?模塊導(dǎo)入,集成和部署;
?多平臺(tái)仿真:
基于Windows的自適應(yīng)時(shí)間(ATS),軟實(shí)時(shí)(MiL/SiL);
基于云端的并行加速運(yùn)算(MiL/SiL);
基于Linux的實(shí)時(shí)仿真(HiL);
?離散和連續(xù)仿真系統(tǒng)的交互操控及結(jié)果可視化(CEE);
?高級(jí)程序員/用戶可以使用ASAM XiL和RestAPI(Python接口等)接 口 與COSYM進(jìn)行交互。
通用模型集成器主要優(yōu)勢(shì):
?通用FMI2.0集成接口,可快速?gòu)?fù)用被控對(duì)象模型,虛擬控制器模型和幀級(jí)虛擬總線模型
?COSYM提供Rest API,可啟動(dòng)后臺(tái)運(yùn)行模式,支持自動(dòng)化流水線工具接入
?可實(shí)現(xiàn)基于Windows和Linux*增量編譯,提升集成效率
聯(lián)合仿真器主要優(yōu)勢(shì):
?支持ASAM-XiL標(biāo)準(zhǔn)接口,調(diào)用API即可運(yùn)行仿真環(huán)境
?支持基于Windows和Linux*系統(tǒng)下的自動(dòng)化集成測(cè)試
?支持基于云原生和容器鏡像技術(shù)的仿真計(jì)算
?支持第三方工具交互式測(cè)試,例如:測(cè)試管理與標(biāo)定工具和總線仿真與信息安全工具功能
3.2 COSYM功能
功能模塊集成:
?COSYM支持用于聯(lián)合仿真的功能模型接口標(biāo)準(zhǔn)(FMI)V2.0;
?提供了用于虛擬ECU(vECU)集成和仿真的環(huán)境;
?建模工具ASCET和ASCMO模型;
?Labcar系列半物理模型,基于Simulink的?模型編譯導(dǎo)入;
?支持模板化的C模塊;
模塊間通信連接:
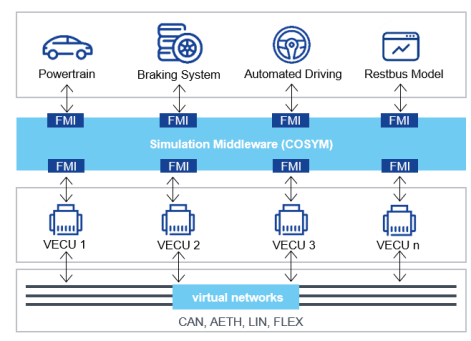
COSYM 提供了基于CAN/CANFD, 車載以太網(wǎng),F(xiàn)lexRay, LIN的的汽車總線虛擬仿真技術(shù)。
基于共享內(nèi)存,該虛擬總線仿真為被動(dòng)和分散式,分布式系統(tǒng)因此可以由任意數(shù)量的模塊構(gòu)建。不需要真實(shí)的網(wǎng)絡(luò)接口,可在虛擬vNet接口上捕獲網(wǎng)絡(luò)流量并將其轉(zhuǎn)發(fā)到真實(shí)的網(wǎng)絡(luò)接口。虛擬CAN和車載以太網(wǎng)支持在ISO / OSI第二層級(jí)及以上的邏輯總線行為模擬,模擬可到幀的傳輸而非電壓電平。
COSYM ?可提供vPIN 級(jí)別的vECU信號(hào)互連插件-虛擬電器層(vEL),以實(shí)現(xiàn)例如故障存儲(chǔ)器,EEPROM,通訊堆棧和輸入/輸出的測(cè)試驗(yàn)證;相比真實(shí)硬件,該插件簡(jiǎn)化或刪除了部分特定硬件和復(fù)雜驅(qū)動(dòng)程序相關(guān)的仿真。
3.3 COSYM應(yīng)用場(chǎng)景
?虛擬控制器自動(dòng)尋優(yōu)標(biāo)定(節(jié)能減排)
?大規(guī)模云端并行計(jì)算及多租戶協(xié)同工作(降本增效)
?虛擬整車及產(chǎn)品級(jí)代碼白盒持續(xù)集成與測(cè)試(加速迭代)
?被控對(duì)象模型自動(dòng)參數(shù)化(精度提升)
四
云上大規(guī)模測(cè)試
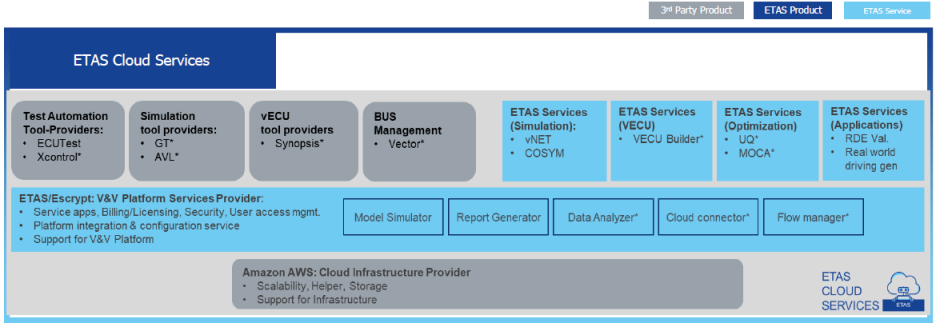
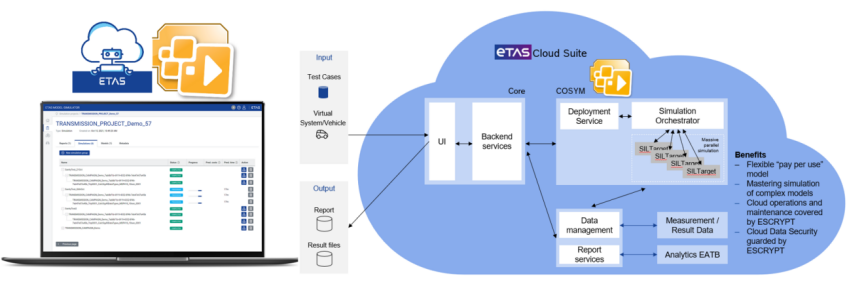
ETAS?的Cloud?Service整體概覽
從ECU到VECU實(shí)現(xiàn)了控制器硬件的虛擬化;從物理控制器測(cè)試聯(lián)調(diào)到聯(lián)合仿真平臺(tái)實(shí)現(xiàn)了測(cè)試環(huán)境的虛擬化;前序兩階段的虛擬化為云上大規(guī)模測(cè)試仿真提供了可能。
4.1 快速的基礎(chǔ)設(shè)施擴(kuò)展
依托于云供應(yīng)商(AWS、Ali Cloud)的彈性伸縮服務(wù),秒級(jí)創(chuàng)建用于大規(guī)模測(cè)試仿真所需的計(jì)算資源。應(yīng)對(duì)復(fù)雜被控對(duì)象模型和海量信號(hào)數(shù)據(jù)輸入也能夠?qū)崿F(xiàn)即時(shí)處理;仿真任務(wù)完成后資源即刻銷毀。相較于傳統(tǒng)本地仿真運(yùn)行,能夠有效避免由于硬件計(jì)算資源不足導(dǎo)致的運(yùn)行崩潰,仿真等待時(shí)間長(zhǎng),從成本上看按量付費(fèi)模式可減少基礎(chǔ)設(shè)施建設(shè)投入,減少計(jì)算資源閑置。
4.2 并行測(cè)試仿真
基于容器云的編排能力和云供應(yīng)商容器服務(wù)?(AWS: EKS、Lambda, Ali Cloud: ACK、FC)能夠完成大規(guī)模并行仿真任務(wù),并行測(cè)試執(zhí)行。能夠?qū)囕v網(wǎng)絡(luò)等復(fù)雜系統(tǒng)進(jìn)行仿真,包括虛擬車輛控制單元、車輛總線和仿真模型。每次仿真運(yùn)行可測(cè)量1000個(gè)信號(hào),輸出報(bào)告支持用戶自定義格式。相較于本地運(yùn)行仿真時(shí)的垂直擴(kuò)展方式,Cloud Service能夠以分布式架構(gòu)水平擴(kuò)展計(jì)算節(jié)點(diǎn),完成各節(jié)點(diǎn)間仿真任務(wù)的數(shù)據(jù)同步,最大可支持1000個(gè)仿真任務(wù)并行執(zhí)行。
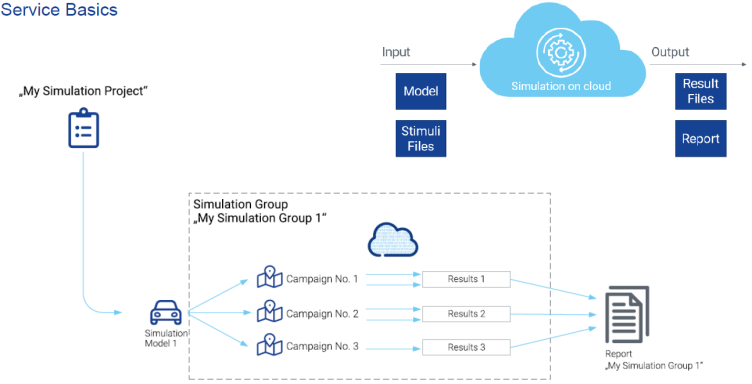
云上仿真測(cè)試用例釋義
4.3 高度安全的云環(huán)境
Cloud Service 上的仿真應(yīng)用Model-Simulator已通過(guò)ISO/IEC 27000?和 27001認(rèn)證。達(dá)到博世安全等級(jí)3(嚴(yán)格保密)。
4.4 兼容的適配性
Cloud Service 兼容COSYM、VECU Builder、ETAB之外,還兼容其它第三方產(chǎn)品,如ECUTest、AVL、Synopsis、Vector等。
4.5 多租戶團(tuán)隊(duì)協(xié)同
多個(gè)仿真測(cè)試團(tuán)隊(duì)可同時(shí)登錄進(jìn)行仿真測(cè)試。各租戶之間模型和信號(hào)等數(shù)據(jù)隔離;租戶之間仿真任務(wù)并行運(yùn)行互不影響;各云上租戶資源可無(wú)限擴(kuò)展。
五
CICT自動(dòng)化流水線
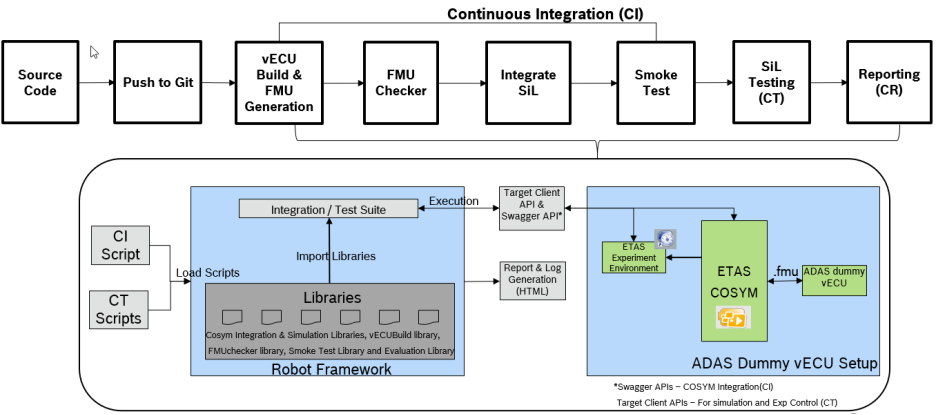
在虛擬控制器生成和虛擬整車平臺(tái)SIL環(huán)境搭建的基礎(chǔ)上,通過(guò)一系列工具鏈實(shí)現(xiàn)持續(xù)集成與持續(xù)測(cè)試的CICT自動(dòng)化流水線。
CICT方案為客戶帶來(lái)的顯著收益:
?開發(fā)與測(cè)試環(huán)節(jié)的全面加速
?盡早發(fā)現(xiàn)錯(cuò)誤并有效反饋
?可重復(fù)使用現(xiàn)有工具
?數(shù)據(jù)安全保障
?使員工可以專注于價(jià)值創(chuàng)造,而非工具與工具鏈
?多方工程協(xié)作的支持
支持構(gòu)建用戶自定義的持續(xù)集成及持續(xù)測(cè)試自動(dòng)化流水線
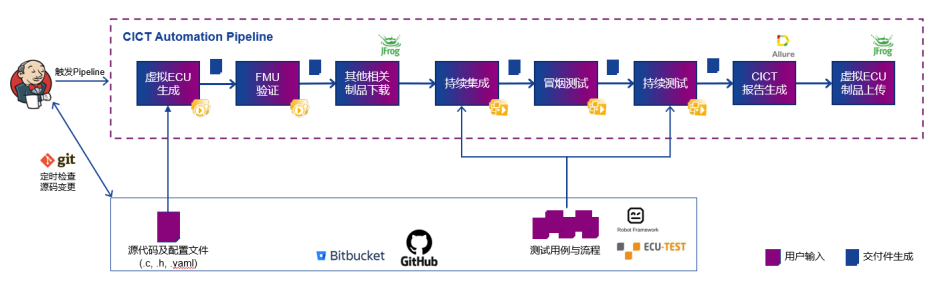
流水線步驟舉例:
?代碼變更,保存并推送代碼倉(cāng)庫(kù),Jenkins觸發(fā)CICT Pipeline流水線。
?拉取代碼變更到本地 PC,生成虛擬控制器FMU并進(jìn)行校驗(yàn)。
?COSYM集成并進(jìn)行冒煙測(cè)試。
?持續(xù)測(cè)試通過(guò),報(bào)告生成和查看分析,上傳測(cè)試通過(guò)虛擬ECU文件至JFrog制品倉(cāng)庫(kù)。
六
應(yīng)用案例
以下是基于ETAS虛擬化開發(fā)工具鏈,列舉一些應(yīng)用案例。
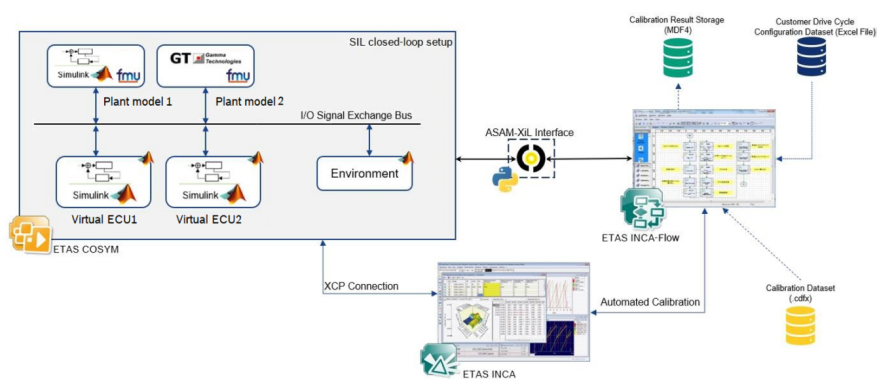
6.1 虛擬標(biāo)定和虛擬總線應(yīng)用,虛擬整車POC
客戶面臨的挑戰(zhàn)和困難:
?仿真平臺(tái)能夠支持接入第三方的模型(如:ML/SL、GT、AMESim、CarMaker等)。
?能夠減少車輛標(biāo)定工作時(shí)間,特別是重復(fù)性標(biāo)定(如:工況脈譜圖的掃點(diǎn)標(biāo)定)。
使用虛擬化方案實(shí)現(xiàn)的成果:
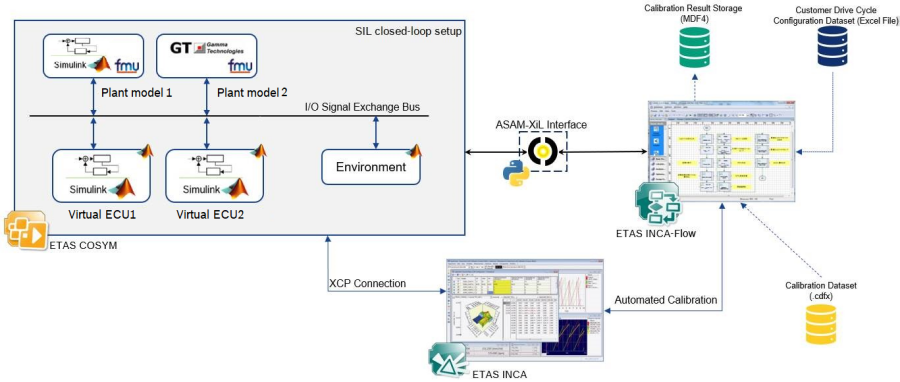
?成功通過(guò)COSYM仿真平臺(tái)完成軟件在環(huán)的閉環(huán)工作。
?標(biāo)定軟件INCA通過(guò)XCP協(xié)議與虛擬控制器建立通訊。
?自動(dòng)化標(biāo)定軟件INCA-FLOW通過(guò)ASAM-XIL接口與ETAS COSYM進(jìn)行連接,實(shí)現(xiàn)對(duì)被控對(duì)象(如:運(yùn)行工況點(diǎn))的控制,并通過(guò)設(shè)計(jì)好的標(biāo)定流程自動(dòng)實(shí)施標(biāo)定工作。
6.2 基于模型在環(huán)和軟件在環(huán)的功能測(cè)試
客戶面臨的挑戰(zhàn)和困難:
?虛擬化實(shí)踐需要基于目前使用的軟件開發(fā)工具。
?虛擬控制器能夠使用優(yōu)化后的標(biāo)定參數(shù),并通過(guò)DCM文件進(jìn)行。
?虛擬化實(shí)踐除了在單機(jī)上進(jìn)行,也支持在云端運(yùn)行。
使用虛擬化方案實(shí)現(xiàn)的成果:
?通過(guò)VECU-Builder工具實(shí)現(xiàn)了Type-1虛擬控制器的生成,并使用了DCM文件中優(yōu)化后的標(biāo)定參數(shù)。
?成功通過(guò)COSYM仿真平臺(tái)完成軟件在環(huán)的閉環(huán)工作。
?單機(jī)性能:比實(shí)時(shí)仿真快2+倍。
?通過(guò)Cloud Service實(shí)現(xiàn)了云端運(yùn)行的預(yù)研評(píng)估工作。
6.3 持續(xù)集成和持續(xù)測(cè)試 CI/CT
客戶面臨的挑戰(zhàn)和困難:
?有計(jì)劃、分步驟地進(jìn)行虛擬化實(shí)踐。
?適用于AUTOSAR架構(gòu)的和非AUTOSAR架構(gòu)的軟件。
?不能因?yàn)橐胩摂M化實(shí)踐,大幅增加開發(fā)工程師的工作負(fù)荷。
?虛擬化實(shí)踐要滿足未來(lái)軟件定義汽車的大趨勢(shì)。
使用虛擬化方案實(shí)現(xiàn)的成果:
?根據(jù)客戶的實(shí)際情況成功建立起點(diǎn)是源代碼,終點(diǎn)為測(cè)試報(bào)告的自動(dòng)化Pipeline。
?Pipeline中可以自動(dòng)地生成虛擬控制器,關(guān)聯(lián)被控對(duì)象模型,接入仿真平臺(tái)。并進(jìn)行虛擬控制器的冒煙測(cè)試后,按照設(shè)定的測(cè)試用例進(jìn)行軟件在環(huán)測(cè)試,最后生成報(bào)告。?Pipeline可以在本地服務(wù)器中部署,也可以移植到云端運(yùn)行。
6.4 虛擬標(biāo)定和云端隊(duì)列
客戶面臨的挑戰(zhàn)和困難:
?需要減少車輛道路測(cè)試和標(biāo)定的人力投入和費(fèi)用。
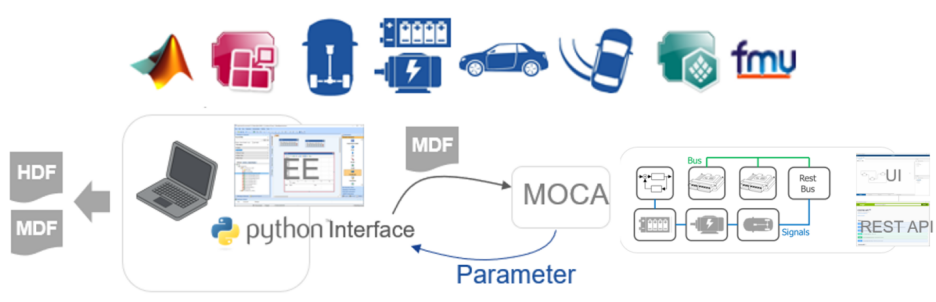
?最大限度兼容目前使用的工具(INCA、ASCMO和MOCA等)。
?提高測(cè)試和標(biāo)定工作的效率。
使用虛擬化方案實(shí)現(xiàn)的成果:
?成功通過(guò)VECU-Builder工具實(shí)現(xiàn)了Type-1虛擬控制器的生成。
?成功通過(guò)COSYM仿真平臺(tái)完成軟件在環(huán)的閉環(huán)工作。?INCA、ASCMO和MOCA等工具能夠在虛擬環(huán)境中無(wú)縫銜接。
?標(biāo)定效率:比實(shí)車測(cè)試快5+倍。
?測(cè)試效率:2小時(shí)仿真=25,000公里路測(cè)。
6.5 虛擬標(biāo)定自動(dòng)化
客戶面臨的挑戰(zhàn)和困難:
?仿真平臺(tái)能夠支持接入第三方的模型(如:ML/SL、GT、AMESim、CarMaker等)。
?能夠減少車輛標(biāo)定工作時(shí)間,特別是重復(fù)性標(biāo)定(如:工況脈譜圖的掃點(diǎn)標(biāo)定)。
使用虛擬化方案實(shí)現(xiàn)的成果:
?成功通過(guò)COSYM仿真平臺(tái)完成軟件在環(huán)的閉環(huán)工作。
?標(biāo)定軟件INCA通過(guò)XCP協(xié)議與虛擬控制器建立通訊。
?自動(dòng)化標(biāo)定軟件INCA-FLOW通過(guò)ASAM-XIL接口與ETAS COSYM進(jìn)行連接,實(shí)現(xiàn)對(duì)被控對(duì)象(如:運(yùn)行工況點(diǎn))的控制,并通過(guò)設(shè)計(jì)好的標(biāo)定流程自動(dòng)實(shí)施標(biāo)定工作。
七
總結(jié)
7.1 應(yīng)用領(lǐng)域
?針對(duì)功能開發(fā)、集成測(cè)試工程師可以在應(yīng)用層代碼開發(fā)階段完成SIL仿真測(cè)試
?針對(duì)標(biāo)定測(cè)試工程師可以在SIL仿真環(huán)境中進(jìn)行多控制器聯(lián)合虛擬標(biāo)定
?實(shí)車數(shù)據(jù)與虛擬整車相互促進(jìn)
?打造敏捷軟件開發(fā)的研發(fā)生態(tài)
?助力車企打造軟件定義汽車和整車數(shù)字孿生應(yīng)用案例
?整車物理模型的搭建、集成與精度提升
?工具兼容性可支持低成本及跨車型通用
7.2 功能特色
?支持跨軟件架構(gòu)和操作平臺(tái),生成不同類型的虛擬控制器vECU,操作流程簡(jiǎn)易成熟
?聯(lián)合仿真平臺(tái)支持標(biāo)準(zhǔn)FMU集成,跨平臺(tái)聯(lián)合仿真,靈活度和兼容性高
?支持三方工具多控制器聯(lián)合虛擬標(biāo)定
?支持構(gòu)建用戶自定義的持續(xù)集成及持續(xù)測(cè)試自動(dòng)化流水線
?各類幀級(jí)虛擬總線標(biāo)準(zhǔn)插件。包括CAN、CANFD、LIN、以太網(wǎng)等虛擬總線
?可基于國(guó)內(nèi)云端部署
7.3 收益優(yōu)勢(shì)
?虛擬控制器可靈活應(yīng)用在軟件開發(fā)前期、中期和后期,提升開發(fā)效率
?標(biāo)準(zhǔn)化仿真平臺(tái),兼容各類虛擬控制器和被控對(duì)象模型,實(shí)現(xiàn)軟件在環(huán)測(cè)試,仿真速率高
?通過(guò)建立持續(xù)集成、持續(xù)測(cè)試Pipeline,減少開發(fā)人員的重復(fù)工作,加速迭代過(guò)程
?支持幀級(jí)虛擬總線、國(guó)內(nèi)云端部署,更好地協(xié)助開發(fā)部門進(jìn)行數(shù)字化轉(zhuǎn)型
?減少硬件測(cè)試臺(tái)架的投資,加快整車開發(fā)測(cè)試和上市周期
?建立多團(tuán)隊(duì)間的協(xié)同開發(fā)軟件的生態(tài)?
?
編輯:黃飛



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論