 電子發(fā)燒友App
電子發(fā)燒友App


豐田第二代混合動(dòng)力系統(tǒng)(THS-Ⅱ),機(jī)械構(gòu)造之精妙,控制策略之嚴(yán)謹(jǐn),可謂獨(dú)步全球,其核心競(jìng)爭(zhēng)力就在于動(dòng)力分配行星齒輪機(jī)構(gòu)——Power Split Device(PSD)。從字面上簡(jiǎn)單理解,該機(jī)構(gòu)就是將發(fā)動(dòng)機(jī)的動(dòng)力重新進(jìn)行了分配,但從嚴(yán)格意義上來闡述,這套機(jī)構(gòu)的精髓就是將發(fā)動(dòng)機(jī)的輸出功率進(jìn)行分流。如此天馬行空,腦洞大開的設(shè)計(jì)理念早在1997年第一代普銳斯上市前,豐田就對(duì)其申請(qǐng)了知識(shí)產(chǎn)權(quán)專利,這一舉措對(duì)當(dāng)時(shí)乃至今日想致力于混合動(dòng)力技術(shù)的各大汽車廠商來說都套上了一層無形枷鎖。
各大汽車廠商為了能夠繞開豐田的專利,想方設(shè)法研究屬于自己的混合動(dòng)力方案,但是時(shí)間證明,目前還沒有更好的混合動(dòng)力方案能從燃油利用率、性能品控、客戶體驗(yàn)等各個(gè)維度上超越THS-Ⅱ。為什么看上去如此簡(jiǎn)單的PSD竟能如同藝術(shù)品般迸發(fā)出無與倫比的科技魅力并且歷久彌新?下面筆者對(duì)搭載全新A25B阿特金森循環(huán)發(fā)動(dòng)機(jī)和P710 E-CVT型混合動(dòng)力變速器的全新Lexus ES300h車的動(dòng)力傳遞路徑進(jìn)行闡述。
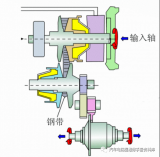
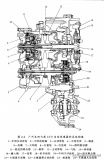
全新Lexus ES300h車的P710 E-CVT型混合動(dòng)力變速器(圖1)由油泵、發(fā)電機(jī)(MG1)、PSD(太陽齒輪、行星齒輪、齒輪架、齒圈、輸入軸)、中間軸主動(dòng)齒輪(復(fù)合齒輪)、中間軸從動(dòng)齒輪、減速主動(dòng)齒輪、減速?gòu)膭?dòng)齒輪、電動(dòng)機(jī)(MG2)及MG2減速器等部分組成,其中復(fù)合齒輪與PSD中的齒圈及中間軸主動(dòng)齒輪集成于一體。
PSD可將發(fā)動(dòng)機(jī)輸出功率分為兩路,一路是將發(fā)動(dòng)機(jī)輸出功率輸出至驅(qū)動(dòng)車輪;另一路是將發(fā)動(dòng)機(jī)輸出功率輸出驅(qū)動(dòng)MG1運(yùn)轉(zhuǎn),使MG1作為發(fā)電機(jī)運(yùn)行,MG1產(chǎn)生的交流電通過絕緣雙柵晶體管后傳輸給MG2,使MG2作為電動(dòng)機(jī)運(yùn)行。MG2產(chǎn)生的動(dòng)力通過MG2減速器傳輸至中間軸從動(dòng)齒輪,從而驅(qū)動(dòng)減速主動(dòng)齒輪運(yùn)轉(zhuǎn),最終通過減速?gòu)膭?dòng)齒輪傳遞給差速器后將動(dòng)力輸出至驅(qū)動(dòng)車輪。
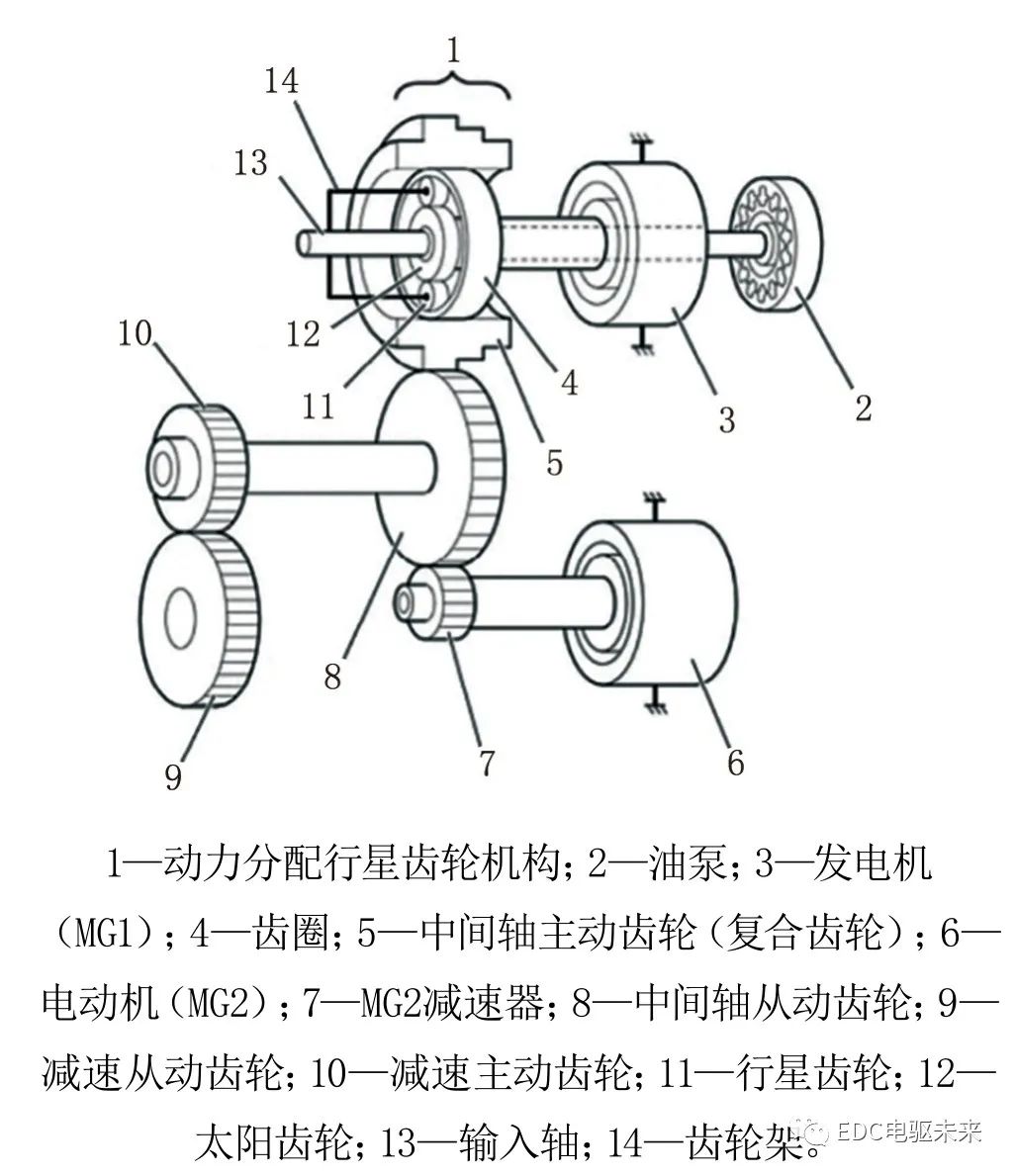
圖1 P710 E-CVT型混合動(dòng)力變速器
THS-Ⅱ在P710 E-CVT型混合動(dòng)力變速器的加持下,能夠提供更加完善的駕駛體驗(yàn),THS-Ⅱ是一套標(biāo)準(zhǔn)的PSD系統(tǒng),通過PSD將發(fā)動(dòng)機(jī)、MG1、MG2組合在一起,MG2與PSD的輸出端相連接,這就意味著MG2與PSD的輸出端永遠(yuǎn)保持同速運(yùn)轉(zhuǎn),這將使MG2只起到調(diào)節(jié)轉(zhuǎn)矩的作用。MG1與PSD的太陽齒輪相連接,當(dāng)MG1以不同方向、不同轉(zhuǎn)速旋轉(zhuǎn)時(shí),處于齒輪架端的發(fā)動(dòng)機(jī)與處于齒圈端的MG2之間就會(huì)出現(xiàn)不同的傳動(dòng)比,從而實(shí)現(xiàn)調(diào)節(jié)速度的目的。MG1在調(diào)節(jié)速度的過程中,也會(huì)輸出一部分轉(zhuǎn)矩,只是MG1的主要功能還是調(diào)節(jié)速度,順帶與MG2一起調(diào)節(jié)轉(zhuǎn)矩,此外,MG1還肩負(fù)著行駛中“拽起”發(fā)動(dòng)機(jī)和車輛停止時(shí)起動(dòng)發(fā)動(dòng)機(jī)的任務(wù)。
混合動(dòng)力車輛控制ECU(HV-ECU)通過換擋桿位置、加速踏板行程及車速計(jì)算駕駛?cè)苏?qǐng)求輸出功率,再根據(jù)冷卻液溫度、高壓動(dòng)力電池充電狀態(tài)、高壓動(dòng)力電池溫度、電氣負(fù)載及系統(tǒng)損耗計(jì)算發(fā)動(dòng)機(jī)輸出功率,再結(jié)合A25B阿特金森循環(huán)發(fā)動(dòng)機(jī)萬有特性圖標(biāo)定的發(fā)動(dòng)機(jī)最佳工作曲線與發(fā)動(dòng)機(jī)輸出功率曲線計(jì)算出發(fā)動(dòng)機(jī)最佳工作狀態(tài)(節(jié)氣門開度及發(fā)動(dòng)機(jī)轉(zhuǎn)速),進(jìn)而確認(rèn)發(fā)動(dòng)機(jī)燃油噴射、點(diǎn)火控制、ETCS-i(電子節(jié)氣門控制)、VVT-i(智能配氣相位)等狀態(tài),從而實(shí)現(xiàn)發(fā)動(dòng)機(jī)輸出功率下最佳燃油利用率。
當(dāng)高壓動(dòng)力電池不處于工作狀態(tài),并保持加速踏板恒定行程的情況下,根據(jù)能量守恒定律,發(fā)動(dòng)機(jī)的輸出功率應(yīng)等于車輛的驅(qū)動(dòng)功率,發(fā)動(dòng)機(jī)的輸出功率施加作用在PSD機(jī)構(gòu)的齒輪架上,根據(jù)HV-ECU內(nèi)存儲(chǔ)的最佳控制策略(圖2),將發(fā)動(dòng)機(jī)輸出功率優(yōu)化分配給MG1及驅(qū)動(dòng)車輪。發(fā)動(dòng)機(jī)運(yùn)行狀態(tài)下,換擋桿位于D擋,當(dāng)車輛剛要起步時(shí),發(fā)動(dòng)機(jī)輸出功率分配給MG1(發(fā)電機(jī))的發(fā)電功率所占發(fā)動(dòng)機(jī)輸出功率的份額最大(MG1正向負(fù)轉(zhuǎn)矩運(yùn)轉(zhuǎn),正向轉(zhuǎn)速最高,負(fù)轉(zhuǎn)矩最小)。因MG1產(chǎn)生的交流電通過絕緣雙柵晶體管傳輸給MG2用作驅(qū)動(dòng),故MG1的發(fā)電量取決于MG2的用電量(即MG1發(fā)電功率=MG2用電功率),此時(shí)MG2(電動(dòng)機(jī))的驅(qū)動(dòng)轉(zhuǎn)矩最大,轉(zhuǎn)速最低(趨近于0 r/min),發(fā)動(dòng)機(jī)輸出功率的剩余部分則被分配到驅(qū)動(dòng)車輪,此時(shí)分配給驅(qū)動(dòng)車輪的份額最小,作用在驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力最低。
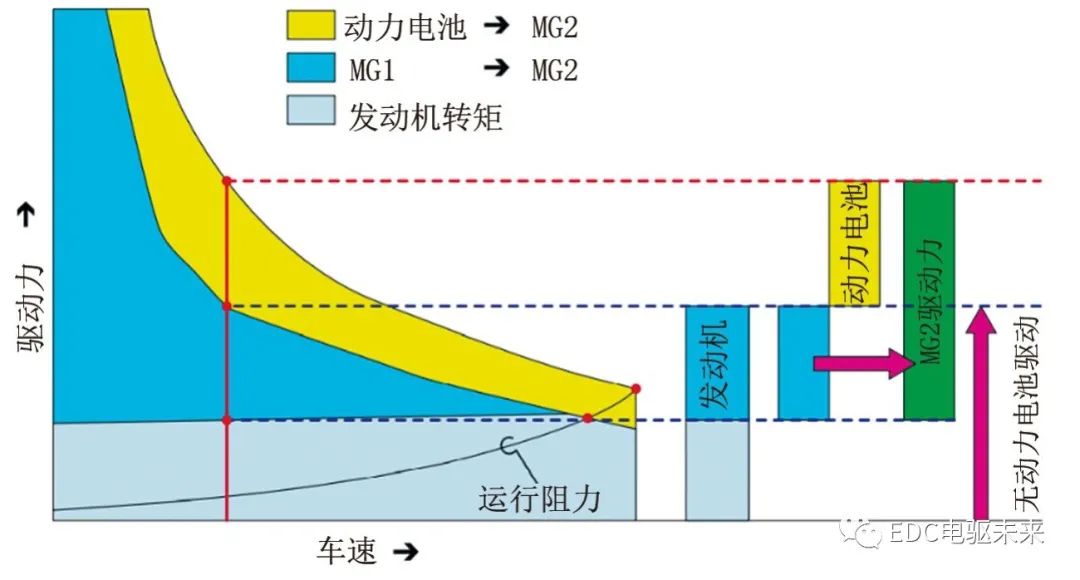
圖2 HV-ECU內(nèi)存儲(chǔ)的最佳控制策略
隨著車速的逐步增加,發(fā)動(dòng)機(jī)輸出功率分配給MG1(發(fā)電機(jī))的份額逐漸減少,MG1旋轉(zhuǎn)速度逐步下降,負(fù)轉(zhuǎn)矩逐步上升,發(fā)電功率逐步減小,但輸出至驅(qū)動(dòng)車輪的驅(qū)動(dòng)功率卻逐步增加。當(dāng)車輛達(dá)到一定車速時(shí),MG1的轉(zhuǎn)速逐步趨近于0 r/min,其用作發(fā)電的負(fù)轉(zhuǎn)矩達(dá)到最大,被分配到的發(fā)動(dòng)機(jī)輸出功率最少,發(fā)電功率最低(趨近于0 kW),MG1發(fā)電功率=MG2用電功率,MG2此刻的用電功率達(dá)到最低(趨近于0 kW),但發(fā)動(dòng)機(jī)的輸出功率分配至驅(qū)動(dòng)車輪上的份額最大,施加在驅(qū)動(dòng)車輪上的驅(qū)動(dòng)功率近乎等于發(fā)動(dòng)機(jī)的全部輸出功率。
因MG1轉(zhuǎn)速趨近于0 r/min,負(fù)轉(zhuǎn)矩最大,通過PSD杠桿作用原理,此刻直接施加在驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力達(dá)到最大,因其驅(qū)動(dòng)力大于行駛阻力,所以車輛此刻仍處于加速行駛狀態(tài)。為了滿足連續(xù)可變無級(jí)傳動(dòng)的控制策略,在保持發(fā)動(dòng)機(jī)輸出功率不變的前提下,傳動(dòng)比的大小需連續(xù)無級(jí)改變,這就意味著隨著車速的進(jìn)一步提升,驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力會(huì)隨之減小。對(duì)此豐田給出的解決方案是讓MG2(發(fā)電機(jī))正向負(fù)轉(zhuǎn)矩運(yùn)轉(zhuǎn),用來持續(xù)抵消作用在驅(qū)動(dòng)車輪上多余的驅(qū)動(dòng)力,MG2產(chǎn)生的交流電通過絕緣雙柵晶體管轉(zhuǎn)化成交流電后傳輸給MG1,MG1(電動(dòng)機(jī))反向負(fù)轉(zhuǎn)矩運(yùn)轉(zhuǎn)(MG1用電功率=MG2發(fā)電功率),從而使車速得以提升。此種方法所達(dá)到的效果近乎于改變傳動(dòng)比。
當(dāng)MG2剛作為發(fā)電機(jī)時(shí),抵消驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力用作發(fā)電的負(fù)轉(zhuǎn)矩最小,但其轉(zhuǎn)速較高,MG1(電動(dòng)機(jī))的轉(zhuǎn)速雖趨近于0 r/min,但此刻的負(fù)轉(zhuǎn)矩最大。隨著車速的增加,MG2抵消驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力越來越多,其轉(zhuǎn)速越來越高,發(fā)電功率也越來越大,MG1的用電功率大小雖與之前保持一致,但隨著MG1轉(zhuǎn)速的不斷增加,負(fù)轉(zhuǎn)矩越來越小,直至驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力與行駛阻力相等,車速達(dá)到最高,整個(gè)過程是一個(gè)加速度越來越小的加速并最終勻速行駛的過程。借助MG2的調(diào)節(jié)轉(zhuǎn)矩功能和MG1的調(diào)速功能,實(shí)現(xiàn)最佳發(fā)動(dòng)機(jī)轉(zhuǎn)矩和轉(zhuǎn)速不變的前提下通過連續(xù)可變的無級(jí)傳動(dòng),最終達(dá)到驅(qū)動(dòng)力與行駛阻力的完美平衡,因此,在后期的勻速行駛中,發(fā)動(dòng)機(jī)內(nèi)部所受的合外力不變,故發(fā)動(dòng)機(jī)可以一直保持在同等輸出功率下最高燃燒效率的發(fā)動(dòng)機(jī)工作線上運(yùn)行。
簡(jiǎn)而言之,THS-Ⅱ是通過MG1、MG2及動(dòng)力電池組成的電控系統(tǒng),為發(fā)動(dòng)機(jī)調(diào)節(jié)輸出功率。如果車輛行駛功率需求小于發(fā)動(dòng)機(jī)輸出功率,則通過行駛充電的方式將發(fā)動(dòng)機(jī)輸出的一部分功率轉(zhuǎn)化為電能存儲(chǔ)到動(dòng)力電池中;當(dāng)車輛行駛功率需求大于發(fā)動(dòng)機(jī)輸出功率,則通過油電混合方式驅(qū)動(dòng)車輛;當(dāng)車輛處于走走停停這種低功率需求時(shí),為節(jié)省燃油消耗,就直接采用純電動(dòng)驅(qū)動(dòng)的方式。
THS-Ⅱ根據(jù)車輛不同的行駛狀態(tài)(圖3,READY-on狀態(tài)、起步狀態(tài)、定速巡行狀態(tài)、節(jié)氣門全開加速狀態(tài)、減速狀態(tài)、倒車狀態(tài))對(duì)發(fā)動(dòng)機(jī)、MG1、MG2的運(yùn)轉(zhuǎn)進(jìn)行優(yōu)化組合,使車輛能夠保持高效行駛。
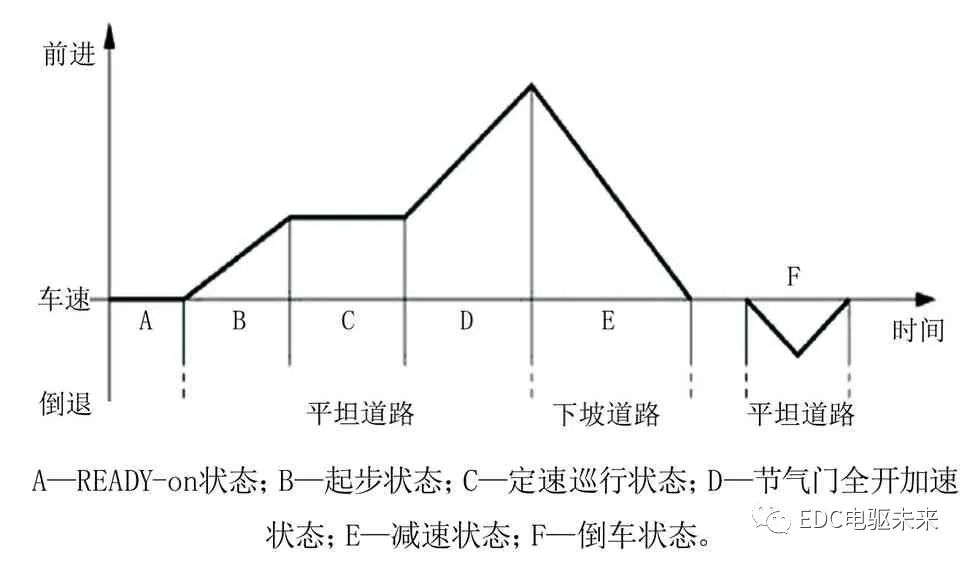
圖3 車輛的行駛狀態(tài)
在列線圖(圖4)中,直線用于表示PSD中太陽齒輪、行星齒輪及齒圈的旋轉(zhuǎn)方向和轉(zhuǎn)速之間的關(guān)系。太陽齒輪、行星齒輪、齒圈的轉(zhuǎn)速大小以距離0 r/min的遠(yuǎn)近表示;“+”表示正向旋轉(zhuǎn),“-”表示負(fù)向旋轉(zhuǎn)。
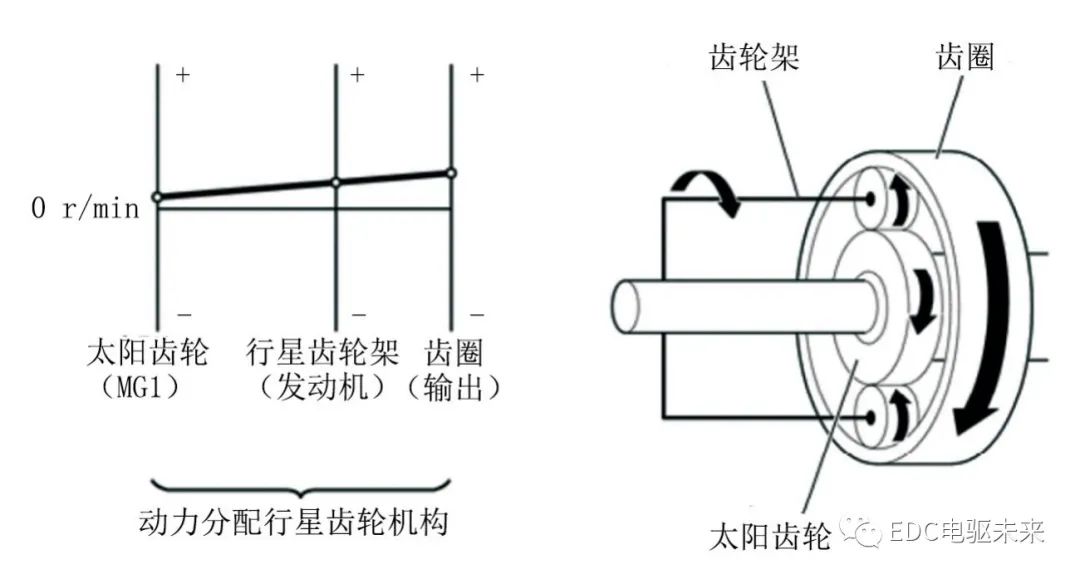
圖4 列線圖
在THS-Ⅱ中,MG1與MG2根據(jù)旋轉(zhuǎn)方向和轉(zhuǎn)矩之間的關(guān)系變化,可作為發(fā)電機(jī)或電動(dòng)機(jī)使用,由于MG1與PSD中太陽齒輪相連接,當(dāng)太陽齒輪正向旋轉(zhuǎn)時(shí),就代表MG1正向旋轉(zhuǎn),同理MG2的旋轉(zhuǎn)方向也與齒圈的旋轉(zhuǎn)方向相同。當(dāng)MG1/MG2正向負(fù)轉(zhuǎn)矩旋轉(zhuǎn)時(shí),就是作為發(fā)電機(jī)使用;當(dāng)MG1/MG2反向負(fù)轉(zhuǎn)矩旋轉(zhuǎn)時(shí),就是作為電動(dòng)機(jī)使用。下面從各個(gè)行駛狀態(tài)詳細(xì)闡述全新Lexus ES300h車的P710 E-CVT型混合動(dòng)力變速器動(dòng)力傳遞路徑。
1 READY-on狀態(tài) ?
READY-on狀態(tài)下(圖5),MG1(發(fā)電機(jī))起動(dòng)發(fā)動(dòng)機(jī),此時(shí)MG2(電動(dòng)機(jī))施加正轉(zhuǎn)矩以抵消發(fā)動(dòng)機(jī)的反作用力,從而防止驅(qū)動(dòng)車輪轉(zhuǎn)動(dòng)。
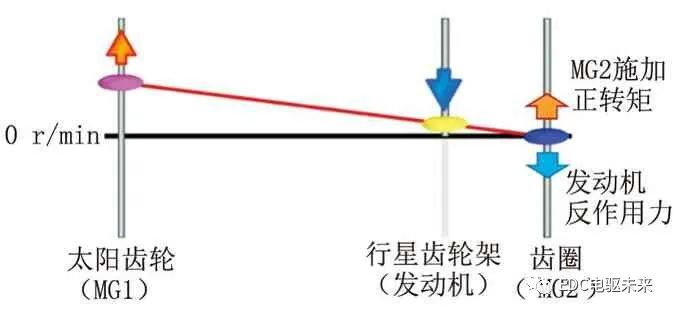
圖5 READY-on狀態(tài)下列線圖
如果高壓動(dòng)力電池的電池荷電狀態(tài)(SOC)不足,則發(fā)動(dòng)機(jī)驅(qū)動(dòng)MG1(發(fā)電機(jī))為其充電。當(dāng)車輛停止時(shí),MG2(電動(dòng)機(jī))施加負(fù)轉(zhuǎn)矩以抵消發(fā)動(dòng)機(jī)直接輸出到齒圈上的轉(zhuǎn)矩,從而防止驅(qū)動(dòng)車輪轉(zhuǎn)動(dòng)。
2 起步狀態(tài) ?
如圖6所示,當(dāng)高壓動(dòng)力電池SOC充足時(shí),車輛起步并僅使用MG2(電動(dòng)機(jī))驅(qū)動(dòng)車輛行駛,當(dāng)車輛低速運(yùn)行時(shí),由于發(fā)動(dòng)機(jī)連接車軸具有很強(qiáng)的旋轉(zhuǎn)阻力,齒輪架的轉(zhuǎn)速為0 r/min。此時(shí),MG1未產(chǎn)生任何轉(zhuǎn)矩,因此太陽齒輪也沒有被施加任何轉(zhuǎn)矩,太陽齒輪負(fù)向旋轉(zhuǎn)(自由旋轉(zhuǎn))以平衡齒圈的旋轉(zhuǎn)。

圖6 起步狀態(tài)列線圖
當(dāng)高壓動(dòng)力電池SOC不足時(shí),發(fā)動(dòng)機(jī)驅(qū)動(dòng)MG1(發(fā)電機(jī))為高壓動(dòng)力電池充電,同時(shí)也為MG2(電動(dòng)機(jī))提供動(dòng)力。在此狀態(tài)下行駛時(shí),發(fā)動(dòng)機(jī)輸出功率一路輸出至驅(qū)動(dòng)車輪;另一路是將發(fā)動(dòng)機(jī)輸出功率輸出驅(qū)動(dòng)MG1運(yùn)轉(zhuǎn)發(fā)電,MG1產(chǎn)生的交流電通過絕緣雙柵晶體管傳輸給MG2,使MG2作為電動(dòng)機(jī)運(yùn)行。MG2產(chǎn)生的動(dòng)力通過MG2減速器傳輸至中間軸從動(dòng)齒輪,從而驅(qū)動(dòng)減速主動(dòng)齒輪運(yùn)轉(zhuǎn),最終通過減速?gòu)膭?dòng)齒輪傳遞給差速器后將動(dòng)力輸出至驅(qū)動(dòng)車輪。
3 定速巡行狀態(tài) ?
車輛在輕負(fù)載和定速巡行狀態(tài)下行駛時(shí)(圖7),發(fā)動(dòng)機(jī)將在最高效的燃燒范圍內(nèi)工作,為車輛提供動(dòng)力。發(fā)動(dòng)機(jī)帶動(dòng)MG1(發(fā)電機(jī))發(fā)電,MG1產(chǎn)生的交流電通過絕緣雙柵晶體管傳輸給MG2,使MG2作為電動(dòng)機(jī)運(yùn)行。MG2產(chǎn)生的動(dòng)力通過MG2減速器傳輸至中間軸從動(dòng)齒輪,從而驅(qū)動(dòng)減速主動(dòng)齒輪運(yùn)轉(zhuǎn),最終通過減速?gòu)膭?dòng)齒輪傳遞給差速器后將動(dòng)力輸出至驅(qū)動(dòng)車輪。
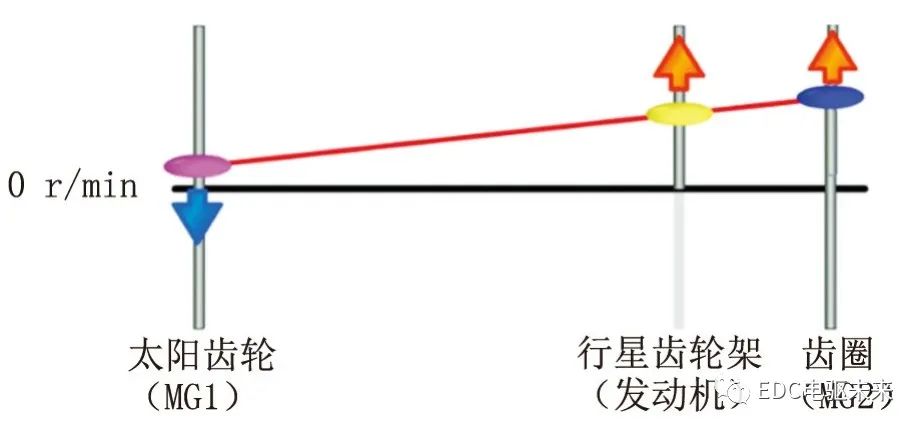
圖7 定速巡行狀態(tài)列線圖
車輛在輕負(fù)載中速狀態(tài)下行駛時(shí)(圖8),發(fā)動(dòng)機(jī)帶動(dòng)MG1(發(fā)電機(jī))發(fā)電,MG1正向負(fù)轉(zhuǎn)矩旋轉(zhuǎn),通過PSD的杠桿作用,將用作發(fā)電的負(fù)轉(zhuǎn)矩放大至2.75倍后,直接輸出至齒圈,因其足以使驅(qū)動(dòng)車輪運(yùn)轉(zhuǎn)且遠(yuǎn)高于此時(shí)驅(qū)動(dòng)車輪的驅(qū)動(dòng)力,MG2(發(fā)電機(jī))發(fā)電以削減額外產(chǎn)生的驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力,此時(shí)MG1與MG2都用作發(fā)電機(jī)為高壓動(dòng)力電池及車身電氣設(shè)備供電。
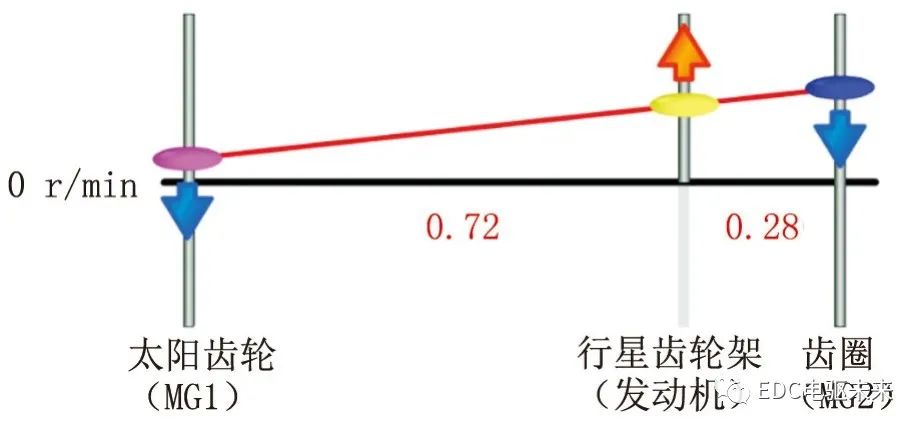
圖8 輕負(fù)載中速狀態(tài)下列線圖
車輛在平坦路面、低負(fù)載高速狀態(tài)下行駛時(shí)(圖9),在保持發(fā)動(dòng)機(jī)輸出功率不變的情況下,HV-ECU繼續(xù)執(zhí)行該工況下的車輛無級(jí)變速控制策略,隨著車速的提升,車速與驅(qū)動(dòng)力呈現(xiàn)反比例線性交替變化(車速越高,驅(qū)動(dòng)力越低),此時(shí)MG2(發(fā)電機(jī))發(fā)電以削減額外產(chǎn)生的驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力,削減的比例隨著車速的提升逐步增長(zhǎng),這也間接引起了MG2的發(fā)電功率逐步增長(zhǎng),MG2產(chǎn)生的交流電通過絕緣雙柵晶體管傳輸至MG1(電動(dòng)機(jī)),MG1反向負(fù)轉(zhuǎn)矩旋轉(zhuǎn),以拉升齒圈的轉(zhuǎn)速,此時(shí)MG1的用電功率等于MG2的發(fā)電功率且與MG2的發(fā)電功率的增幅大小一致。
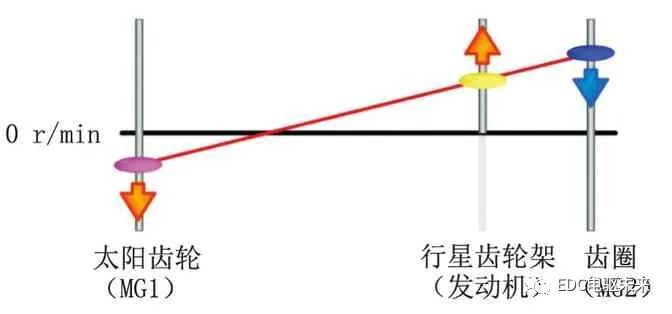
圖9 平坦路面、低負(fù)載高速狀態(tài)下列線圖
起初MG1的驅(qū)動(dòng)轉(zhuǎn)矩最大,轉(zhuǎn)速最低,但隨著MG1反向旋轉(zhuǎn)速度的提升,負(fù)轉(zhuǎn)矩逐步減小,車輛一直處于加速度不斷減小的加速行駛狀態(tài),直至被削減后的驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力與行駛阻力達(dá)到平衡,車輛實(shí)現(xiàn)勻速行駛。此刻MG1的用電功率達(dá)到最大。整個(gè)過程中,通過連續(xù)可變的無級(jí)傳動(dòng),在最終達(dá)到勻速行駛后,始終將任一發(fā)動(dòng)機(jī)的輸出功率鎖定在最佳發(fā)動(dòng)機(jī)運(yùn)行工作線上,保持等功率線上最高燃燒效率的發(fā)動(dòng)機(jī)的轉(zhuǎn)矩和轉(zhuǎn)速,以求整車的最佳動(dòng)力性和最低燃油消耗率。
4 節(jié)氣門全開加速狀態(tài) ?
車輛行駛狀態(tài)從定速巡行變?yōu)楣?jié)氣門全開加速狀態(tài)時(shí)(圖10),高壓動(dòng)力電池給MG2(電動(dòng)機(jī))提供電能,發(fā)動(dòng)機(jī)繼續(xù)帶動(dòng)MG1(發(fā)電機(jī))發(fā)電,從而產(chǎn)生一個(gè)負(fù)轉(zhuǎn)矩,通過PSD的杠桿作用,直接將發(fā)動(dòng)機(jī)的部分輸出功率輸出至驅(qū)動(dòng)車輪上,同時(shí)施加在MG1上的負(fù)轉(zhuǎn)矩產(chǎn)生交流電通過絕緣雙柵晶體管傳輸?shù)組G2(電動(dòng)機(jī))上驅(qū)動(dòng)。
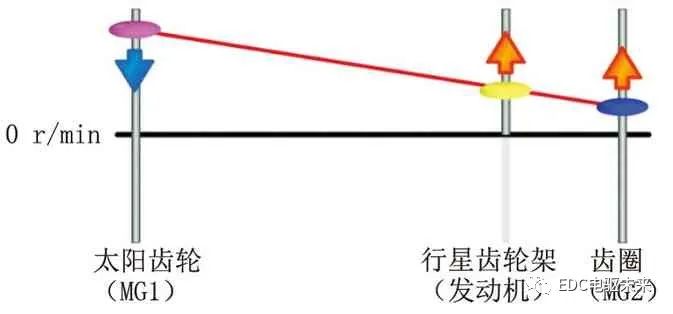
圖10 節(jié)氣門全開加速狀態(tài)列線圖
當(dāng)高壓動(dòng)力電池SOC充足且加速踏板完全踩下時(shí)(圖11),HV-ECU繼續(xù)執(zhí)行該工況下的車輛無級(jí)變速控制策略,MG2(電動(dòng)機(jī))自始至終使用高壓動(dòng)力電池提供的電能以補(bǔ)償車輪上的驅(qū)動(dòng)力。隨著車速的增加,MG1(發(fā)電機(jī))正向負(fù)轉(zhuǎn)矩的旋轉(zhuǎn)轉(zhuǎn)速逐步降低,MG1產(chǎn)生的電能通過絕緣雙柵晶體管傳輸至MG2(電動(dòng)機(jī))的功率也逐步下降,但MG1的負(fù)轉(zhuǎn)矩卻隨著旋轉(zhuǎn)轉(zhuǎn)速的逐步降低而呈增長(zhǎng)趨勢(shì)(即發(fā)動(dòng)機(jī)直接輸出至車輪上的輸出功率逐步增長(zhǎng)),直至MG1的轉(zhuǎn)速趨近于0 r/min時(shí),MG1產(chǎn)生的交流電通過絕緣雙柵晶體管傳輸至MG2(電動(dòng)機(jī))的功率最小(趨近于0 kW),發(fā)動(dòng)機(jī)分配給驅(qū)動(dòng)車輪的輸出功率達(dá)到最大。
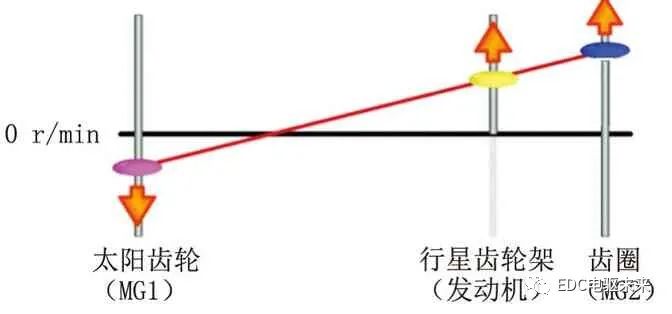
圖11 高壓動(dòng)力電池SOC充足且加速踏板完全踩下時(shí)列線圖
在此情況下,若要進(jìn)一步提升車速,必須削減發(fā)動(dòng)機(jī)分配到驅(qū)動(dòng)車輪上過多的驅(qū)動(dòng)力,由于MG2此時(shí)是作為電動(dòng)機(jī)持續(xù)為驅(qū)動(dòng)車輪輸出動(dòng)力,無法作為發(fā)電機(jī)來削減驅(qū)動(dòng)車輪上過多的驅(qū)動(dòng)力,因此HV-ECU使高壓動(dòng)力電池對(duì)MG1(電動(dòng)機(jī))提供電力輸出,使MG1充當(dāng)電動(dòng)機(jī)反向負(fù)轉(zhuǎn)矩旋轉(zhuǎn),以此提升驅(qū)動(dòng)車輪的轉(zhuǎn)速,從而提升車速。隨著車速的提升,MG2直接輸出至驅(qū)動(dòng)車輪上的驅(qū)動(dòng)力大小幾乎沒有變化,發(fā)動(dòng)機(jī)輸出功率不變,隨著MG1對(duì)驅(qū)動(dòng)車輪轉(zhuǎn)速的逐漸拉升,發(fā)動(dòng)機(jī)輸出至驅(qū)動(dòng)車輪的驅(qū)動(dòng)力也隨之下降,當(dāng)發(fā)動(dòng)機(jī)輸出至驅(qū)動(dòng)車輪的驅(qū)動(dòng)力結(jié)合MG2電動(dòng)機(jī)補(bǔ)償至驅(qū)動(dòng)車輪的輸出功率與行駛助力達(dá)到平衡后,車速達(dá)到最高,以勻速狀態(tài)行駛,此時(shí),MG1所用來自高壓動(dòng)力電池的用電功率達(dá)到最大,反向轉(zhuǎn)速達(dá)到最高,負(fù)轉(zhuǎn)矩最小。
5 減速狀態(tài) ?
當(dāng)車輛擋位置于D擋行駛,且車速逐漸降低時(shí)(圖12),發(fā)動(dòng)機(jī)輸出功率為0 kW,此時(shí)驅(qū)動(dòng)車輪驅(qū)動(dòng)MG2(發(fā)電機(jī))為高壓動(dòng)力電池進(jìn)行充電,MG2對(duì)驅(qū)動(dòng)車輪產(chǎn)生阻力,并產(chǎn)生制動(dòng)作用。
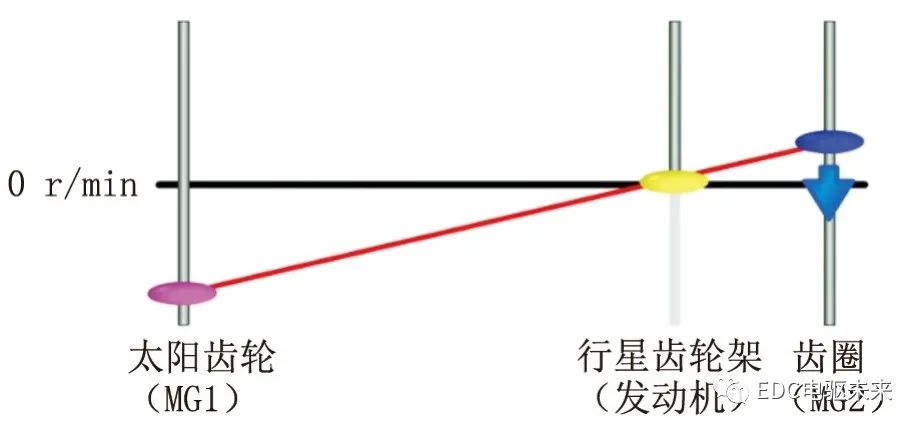
圖12 車輛擋位置于D擋行駛,且車速逐漸降低時(shí)列線圖
6 倒車狀態(tài) ?
倒車狀態(tài)根據(jù)高壓動(dòng)力電池SOC是否充足可分兩類討論,當(dāng)高壓動(dòng)力電池SOC充足時(shí)(圖13),高壓動(dòng)力電池給MG2(電動(dòng)機(jī))提供電能進(jìn)行反向負(fù)轉(zhuǎn)矩旋轉(zhuǎn),此時(shí)發(fā)動(dòng)機(jī)不工作,因?yàn)镸G1的旋轉(zhuǎn)阻力小于發(fā)動(dòng)機(jī)的旋轉(zhuǎn)阻力,因此MG1正向自由旋轉(zhuǎn)以平衡驅(qū)動(dòng)車輪的旋轉(zhuǎn)。
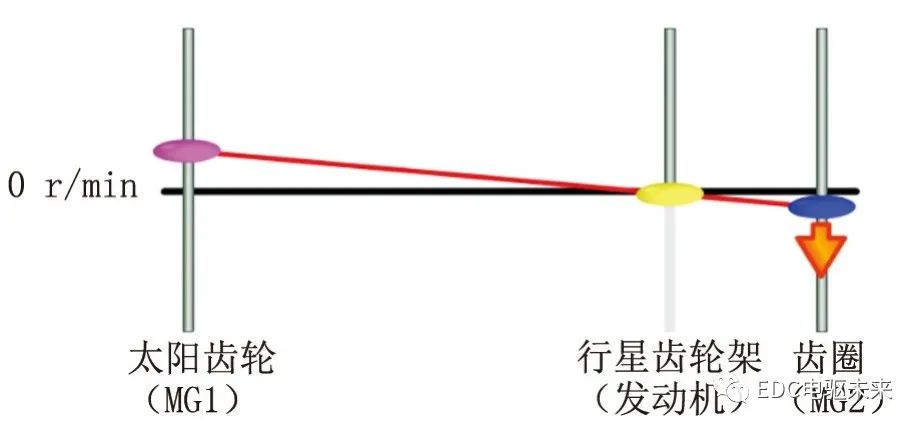
圖13 倒車狀態(tài)下高壓動(dòng)力電池SOC充足時(shí)列線圖
當(dāng)高壓動(dòng)力電池SOC不足時(shí)(圖14),發(fā)動(dòng)機(jī)給MG1(發(fā)電機(jī))提供動(dòng)力輸出,使MG1進(jìn)行正向負(fù)轉(zhuǎn)矩旋轉(zhuǎn),MG1產(chǎn)生的交流電通過絕緣雙柵晶體管分別傳輸至MG2和高壓動(dòng)力電池,此時(shí)MG2(電動(dòng)機(jī))反向負(fù)轉(zhuǎn)矩旋轉(zhuǎn)使驅(qū)動(dòng)車輪反向旋轉(zhuǎn)。
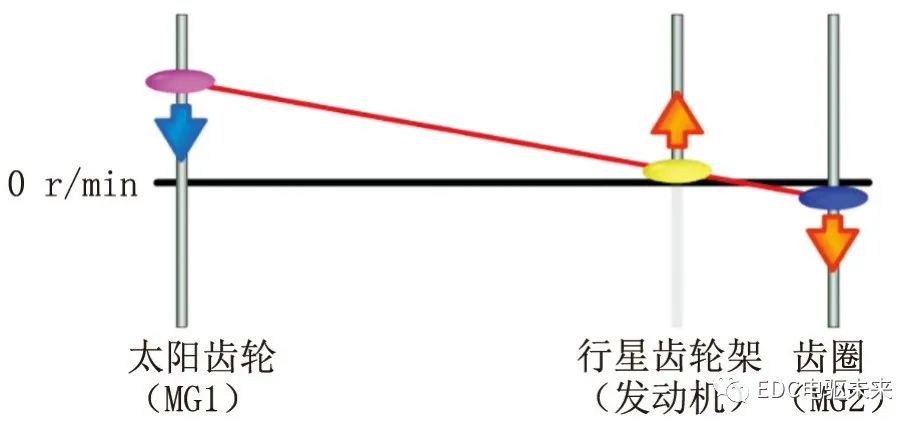
圖14 倒車狀態(tài)下高壓動(dòng)力電池SOC不足時(shí)列線圖
審核編輯:黃飛
?











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論