 電子發燒友App
電子發燒友App


《智能底盤》系列文章聚焦當下底盤智能化發展趨勢,并對主流的底盤產品進行介紹。
作為開篇,本文將探討底盤的發展歷程,并細數智能底盤的發展趨勢。
1
底盤的發展歷程?
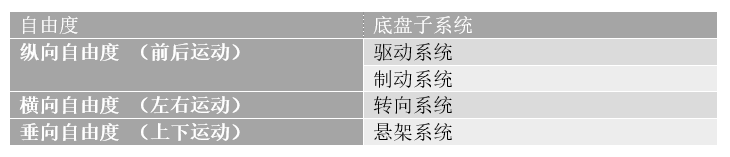
自汽車誕生一百余年以來,底盤發展就和汽車發展深度綁定。底盤系統決定了汽車縱向、橫向和垂向六個自由度的動態行為,是汽車能夠跑運行的必要條件。根據廣義上的定義,底盤系統的組成部件繁多,除了驅動、轉向和制動等系以外,還包含車身、油門、離合器等部件;但如果僅站在六個自由度控制的角度,底盤系統可以細化成以下4個子系統。
縱觀底盤系統的發展歷程,可以概況為三個時期:
機械時期
機電混合時期
智能時期
底盤的機械時期
在早期車輛質量比較小,速度比較低,機械式底盤能夠滿足駕駛員操控需求。駕駛員通過對方向盤和踏板的操作來直接控制輪胎的六分力,從而間接地改變車輛的三向平動和三向轉動的自由度。
隨著科學技術的發展及汽車工業的發展,尤其是軍用車輛及軍用技術的發展,底盤系統也有了新的突破,比如液壓轉向和液壓制動的推出是對機械時期底盤的重大技術革新。于此同時,隨著車輛越來越重,助力器開始被廣泛使用于底盤控制中,為駕駛員提供轉向或制動助力。
該階段典型的產品有機械液壓助力轉向系統和真空助力器。機械液壓助力轉向系統利用發動機的動力帶動油泵給機械轉向提供液壓助力,這樣操作方向盤就更輕松了。但是由于使用了發動機動力作為油泵動力,所以,發動機用于行駛的動力會有部分損耗。

機械液壓助力轉向系統,圖片來自網絡
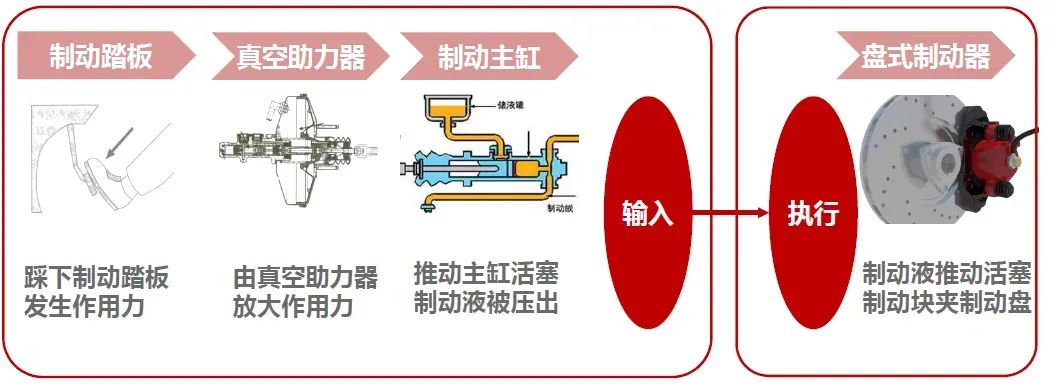
制動助力產品真空助力器的工作原理為:
駕駛員踩下制動踏板,由于杠桿作用,踏板力經過第一級放大傳遞到真空助力器;真空助力器經過第二級放大將制動力傳遞到主缸;主缸的制動液被推入輪缸并在壓強的作用下產生更大的制動力,推動輪端卡鉗加緊剎車盤,從而實現制動。
真空助力器工作原理,圖片來自網絡
真空助力器正常工作的關鍵在于有穩定的真空來源。裝有汽油發動機的車輛由于發動機采用點燃式,因此在進氣歧管可以產生較高的真空壓力,可以為真空助力制動系統提供足夠的真空來源,而對于柴油發動機驅動的車輛,由于發動機采用壓燃式CI(Compression Ignition cycle),這樣在進氣歧管處不能提供相同水平的真空壓力,所以需要安裝提供真空來源的真空泵。
雖然液壓系統的引入為駕駛員提供了助力,但是從本質上看,底盤機械時期的車輛運動控制完全取決于駕駛員的輸入。
底盤的機電混合時期
在機電混合時期,傳統的機械液壓設計與單片機控制結合,在進一步減輕駕駛員的駕駛負荷的同時,還能夠通過軟件控制輔助駕駛員進行更好地車輛控制,車輛的燃油經濟性、安全性和舒適性都大大提高。
在這一時期,最為大家熟知的革命性產品之一就是制動防抱死系統 (Anti-lock Brake System, ABS)。就乘用車來說,在日常駕駛中有時候緊急制動來避險,但是緊急制動下制動卡鉗對制動盤作用力過大,會導致車輪抱死。車輪抱死引起的車輛表現不當(如緊急制動時無法在安全距離內剎停或者緊急制動時車輛甩尾)往往帶來嚴重的交通事故。
早在上世紀30年代,汽車工程師就開始研究制動防抱死系統ABS (Anti-lock Brake System, ABS) 來解決緊急制動時車輪抱死問題。ABS是制動系統中的一種閉環控制裝置,在制動時它可以防止車輪抱死,保證車輛的制動性和穩定性。
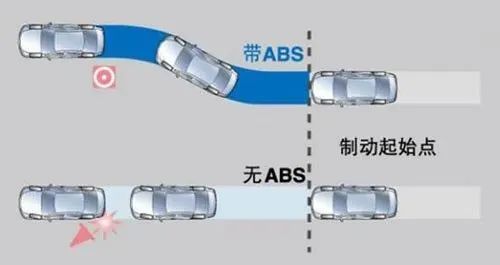
ABS工作原理,圖片來自網絡
到了70年代后期,由于數字電子計算機技術的發展,同時也得益于液壓控制技術的進步,德國博世公司推出基于液壓控制的ABS,控制效果相當理想,于是博世在1978年正式量產ABS產品。博世ABS的問世正式拉開了底盤電子穩定性系統發展的序幕,在這以后,Bosch、ITT Automotive、Kelesy-Hayes、Wabco等許多公司不斷加強對ABS的研究,各種新型的ABS層出不窮,性能不斷優化而價格逐漸降低,如今ABS已經成為了轎車和商用車的標配。
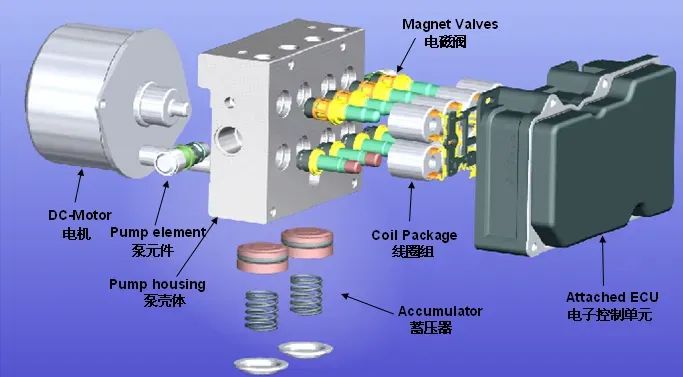
博世ABS爆炸,圖片來自網絡
智能底盤時期
在今天汽車電動化和智能化的浪潮之下,傳統動力升級為三電系統,底盤系統上傳統的機械零部件得到精簡,電控程度越來越高;與此同時,隨著輔助駕駛系統(如ACC、AEB等)的日益普及和自動駕駛系統的逐步落地,衍生出了越來越豐富的智能化場景的新需求。
另一方面,消費市場對汽車定位也在發生改變。終端消費者不再只將汽車視為運載工具,汽車變成了提高生活品質的載體和空間,這一消費趨勢意味著行業在追求汽車智能的同時,也需要更進一步地提高汽車的舒適性和駕駛質量,為消費者提供更愉悅的用車體驗。
在這一浪潮的驅動下,汽車對底盤系統也提出了更高的要求,更加智能的底盤才能適應汽車電動化和智能化的發展需要。
對智能底盤的新要求可以概況為四類:
有個性:根據客戶駕駛習慣提供個性化定制
高性能:系統響應更加精準和迅速
可成長:系統具備自學習能力并支持OTA升級
高安全:產品安全和信息安全多重安全保證
根據清華大學張俊智教授的定義,智能化底盤依舊保留了底盤的兩大功能:
承載
行駛
但承載的對象和完成行駛的手段發生了變化。
首先,智能底盤為自動駕駛系統、座艙系統、動力系統提供承載平臺,這是承載對象的變化。其次,在行駛任務實現方面,我們從人車路的關系梳理了智能底盤具備的新能力。在車與路的關系中,智能底盤對車輪與地面間的相互作用具備認知、預判和控制的能力。在車與人的關系中,汽車變為無人駕駛后,原本人對底盤異常狀態的感知和適應性操縱消失了,智能底盤應具備管理自身運行狀態的能力。這是底盤新增的幾個能力,這些能力都服務于行駛任務,所以最終智能底盤還是具體實現車輛智能行駛任務的系統。
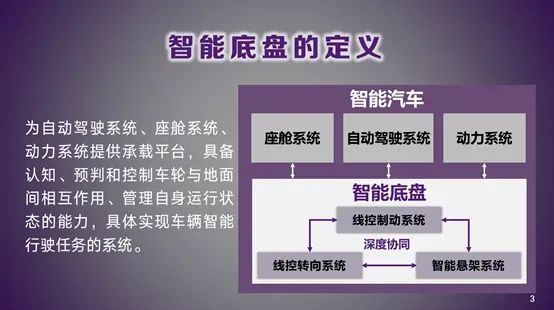
清華大學張俊智教授對智能底盤的定義,圖片來自網絡
2
智能底盤的發展趨勢
雖然從目前的市場占有率看,底盤系統還處于機電混合時期,但是已經可以看到正在向智能底盤過渡的趨勢。
趨勢1:線控化
首先是線控技術在汽車上的普及和進化。線控技術源于飛機控制系統,它將飛機駕駛員的操縱命令轉換成電信號,通過電纜直接傳輸到自主式舵機。線控技術最大的優勢是響應精準迅速,這一優勢在汽車線控技術上得到繼承。
當前各個底盤控制子系統都已經實現線控,但是底盤線控技術更多體現在控制決策層面,駕駛員輸入層面還是依賴駕駛員的直接輸入(轉向或踩踏板)。隨著自動駕駛的演變,駕駛員的角色得到弱化,方向盤和踏板的作用逐漸減弱,線控底盤已有向真正意義上的線控發展的趨勢。最明顯的一個印證趨勢的案例就是線控轉向產品的法規落地。早在幾年前就有車企推出線控轉向產品,但是受限于法規無法量產,如今法規已經漸漸不是阻礙,拿中國來說,GB 17675-2021 《汽車轉向系 基本要求》中刪除了不得裝用全動力轉向機構的要求(1999年的3.3),也就是國內法規層面已允許轉向系統方向盤與轉向器之間的物理解耦。而Cybertruck在多國的熱售也意味著其他國家的相關法規也是同樣的趨勢。
除了線控轉向外,線控制動相關的法規也正在制定中。
趨勢2:個性化
電控系統和駕駛員機械接口解耦,可以更加靈活地對底盤系統特性進行調節,從而滿足不同客戶的個性化需求,這是線控底盤的另一優勢。
智能底盤系統對個性化需求的追求也表現在搭載主動懸架系統所的車輛的價位的下探。眾所周知,懸架系統調教的核心在于協調舒適性和操穩性的矛盾,而主動懸架系統則被認為是魚和熊掌兼得的答案,它能夠精準地感知車況和路面等信息并自動調整懸架高度、剛度和阻尼,從而大幅度提高車輛操穩和舒適性。另外,系統能學習用戶的駕駛習慣,并合理調節出最適合用戶的懸架控制策略。

搭載主動懸架的車型價格在下探,圖片來自國盛證券研究所
趨勢3:多執行器融合
其次,智能駕駛系統E/E的變革也催生了智能底盤E/E的進化。在機電混合時期,底盤系統的E/E架構為簡單的子系統ECU的疊加,雖然子系統間有合作,但是這些合作僅體現在信息共享層面,各個子系統依舊“各自為營”,功能控制受到彼此的制約,響應遲緩,沒有體現出“1+1>2”的效果。在基于底盤域控制器的新E/E架構下,智能控制核心功能集中于域控制器內,實時對各個子系統進行協同控制,精準且快速響應,打破子系統間功能簡單疊加的壁壘。
目前主流的主機廠和供應商都在積極擁抱智能駕駛系統E/E的變革浪潮,其中底盤融合趨勢越來越明顯,且有很多功能已經量產,給用戶帶來了更好的體驗。
舉例來說,博世2023年推出的車輛動態控制系統2.0(VDC2.0)適用于裝備分軸三電機及四電機動力系統的車輛,可協調控制驅動電機及制動控制器。其可以將驅動扭矩矢量控制和制動控制完美結合,通過對車軸或車輪扭矩的合理分配,充分挖掘車輛加速潛能,發揮彎道極限,優化動態響應。在裝備有線控轉向的車輛中,博世車輛動態控制系統2.0可協調控制線控轉向的轉向輪角度和制動控制器。其協同線控轉向功能后,制動和線控轉向執行器便能形如一體、相得益彰,充分釋放底盤各執行器的最大潛能。車輛動態控制系統2.0可滿足全場景定制化駕駛體驗,適用于各種車輛類型和不同動力總成配置,通過跨域線控執行器實現車輛運動與控制的集成與協調,可在制動系統及其它系統上靈活部署功能軟件,助力更安全、舒適且敏捷的駕乘體驗。

博世車輛動態控制系統2.0(VDC2.0)方案實現多執行器融合. 來源:搜狐汽車
趨勢4:更高的安全要求
安全始終是底盤系統設計的重要課題,汽車智能化發展對智能底盤延申了新的安全話題。
SAE J3016對車輛自動化級別的分類對讀者來說已不陌生。如果將這五個級別進行進一步歸類則可以歸納為:
輔助駕駛 (包含Level1/Level2)
自動駕駛 (包含Level3/Level4/Level5)
輔助駕駛和自動駕駛最大的區別在于系統故障導致事故的責任方的不同:
對于輔助駕駛,當系統出現故障以后,只要正確向駕駛員報告了故障,接下來能否脫險全看駕駛員的水平,出了事故責任方在駕駛員,汽車廠家是沒有責任的。
對于自動駕駛,系統在出現故障之后,需要系統來自己操作避免事故(自動駕駛等級越高,駕駛員可以越晚介入接管甚至是完全不用接管),出了事故是汽車廠家的責任而不是駕駛員的責任。
對于高速自動駕駛系統而言,車輛在高速運行過程中出現單一故障,安全狀態通常定義為停到路邊的應急車道,為實現這一安全狀態,目前業界普遍達成一致的方案至少需要以下冗余:
通訊冗余:當單一鏈路出現信號中斷,系統可實現信息的無縫安全銜接
低壓電源冗余:主電源失效后,備份電源能夠支撐ECU完成安全降級動作
感知冗余:多傳感器數據融合技術可以保證車輛行駛構成中精準實現物體及行人的識別,從而支持車輛時刻做出正確的控制行為
大腦控制器冗余:兩個大腦互相監督、互為備份,主大腦故障發生時,備份大腦及時接管
制動冗余:主制動系統失效后,備份系統依然提供一定的制動能力來維持制動控制及制動穩定性控制
轉向冗余:如果故障發生后的安全狀態定義為繼續運行而不是剎停,那么當一路轉向系統故障后,備份系統需要能夠支持車輛完成接下來的運行場景中的轉彎工況
由此可見智能底盤的冗余設計在實現自動駕駛系統功能安全的重要性和必要性。
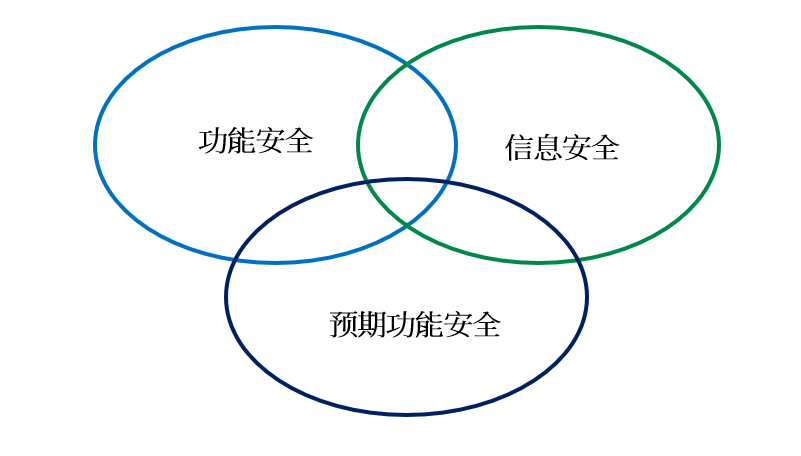
目前汽車行業達成的普遍共識是:功能安全、預期功能安全和信息安全是保障汽車智能化安全的“三駕馬車”。
3
總結
以上可以看出,為滿足汽車的電動化和智能化發展的新要求,智能底盤的發展思路正在逐步清晰;而從落地層面看,智能底盤的發展才剛剛起步,可以預見將會面臨重重挑戰。
但是,挑戰也意味著機遇。首先是國家戰略層面,智能電動汽車已成為我國汽車產業發展的戰略方向,這意味著作為智能電動汽車的支撐基礎,智能底盤有了良好的發展土壤。其次,市場需求對智能電動汽車的需求的持續走高也為智能底盤的發展提供了經濟支持,而在新E/E架構下主機廠和供應商之間新的合作模式和職責劃分也使得中國本土品牌將迎來一次難得的崛起良機。
在這些良性因素的激勵下,相信智能底盤大有可為。
審核編輯:黃飛
?










 工商網監
工商網監
評論