 電子發(fā)燒友App
電子發(fā)燒友App


TransModeler的變道模型適合大范圍仿真的路徑選擇模擬,參數(shù)設置非常重要。在大范圍仿真模型中,變道模型的參數(shù)直接影響了車輛的車道選擇。用戶常見的問題是,在交叉口同一方向的幾個車道,經常是一個車道排了很長的隊,而其他可用的車道卻沒有車輛。這實際上是駕駛行為參數(shù)設置的問題。下面用一個案例,詳細分析解決這一問題的設置方法。
1、問題描述 某用戶在一個片區(qū)仿真過程中,發(fā)現(xiàn)一交叉口北進口(Link25)左轉四條車道中,出現(xiàn)三條車道基本閑置的情況,而最左側車道的占用率為100%。檢查下游路段、車道連通性均無問題,嘗試增加左轉車輛需求,車輛依舊只在最左側車道排隊。
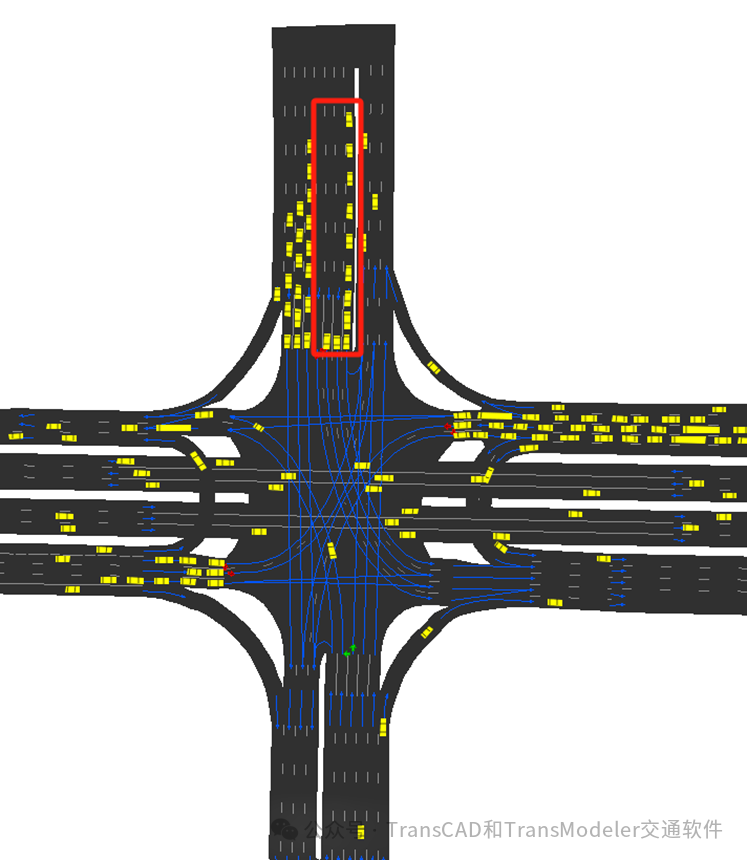
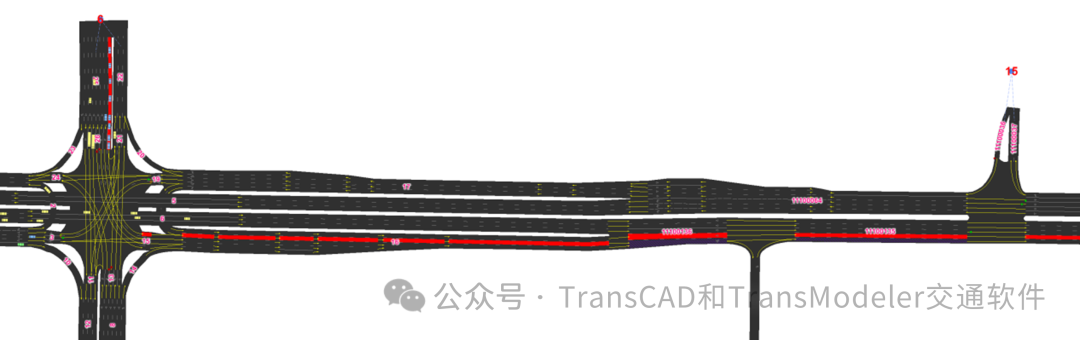
2、原因分析 上述問題的出現(xiàn),一般是和仿真車輛的網絡中的路徑選擇相關。通過路徑分析發(fā)現(xiàn),車輛左轉后需要繼續(xù)直行,途經的路段均為Link25-Link26-Link15-Link16-Link11100136(下圖紅色路徑),但由于涉及多處車道數(shù)變化,及Link11100136中公交專用道設置(最右側車道)的影響,車輛在Link25中選擇不同的車道出發(fā),對應的變道次數(shù)會有所不同。選擇最左側車道出發(fā)的車輛,變道次數(shù)最少,只需換一次;若在左側第二車道,得變道兩次;若第三車道,則變道三次。
由于變道次數(shù)對路徑選擇參數(shù)的影響太大,導致位于最左側車道為最優(yōu)路徑選擇,但這顯然跟實際情況不相符。與仿真駕駛行為中,這個情況和車輛強制變道模型的臨界距離(Critical Distances)參數(shù)有關。只有當車輛到下個路段的長度大于臨界距離參數(shù)時,下游車道才會在換道選擇集中。每增加一次換道,臨界距離相應增加,導致了上述現(xiàn)象。不同國家和地區(qū)的駕駛員行為差異,需要通過設置臨界距離來加以區(qū)分。
3、仿真原理
說了上面的原因后,用戶不得不需要了解一下變道模型的仿真原理了。通常,車輛變更車道,可以分為自主變道和強制變道。
(1)自主變道(Discretionary LaneChanging)
在車輛考慮自主或強制車道變更之前,它將首先探索當前和相鄰車道,以確定哪些車道符合行駛條件。車道可能因各種原因被視為不具備條件:
當前車道和預期車道之間存在障礙物。
禁止從當前車道變?yōu)轭A期車道(實線),且駕駛員遵守本變道法規(guī)。
車道被事故或失速車輛阻塞。
車道有“封閉”車道使用信號。
車道上的收費亭關閉。
不允許車輛進入車道(例如,僅限高載客率車輛進入)。
車輛位于高速公路出口或城市交叉口的“臨界距離”內(由前瞻l(fā)ook-ahead模型確定),且預期車道未連接到車輛路徑。
自主變道( DLC )主要是在車輛對當前速度普遍不滿意的情況下考慮,只有在不需要強制變道( MLC )時才考慮,強制變道優(yōu)先。如果車輛沒有以或接近其期望速度行駛,并且其變道行為沒有限制(例如,強制變道、事故),它將考慮自主換道。
(2)強制變道(MandatoryLane Changing)
與自主變道一樣,在評估強制變道模型之前,確定合格的車道選擇集。用于確定車道合格性的規(guī)則與用于自主變道的規(guī)則相同。然而,強制變道并不像自主變道更那樣被明確地建模為備選方案之間的選擇。換言之,駕駛員不會“選擇”強制改變車道。相反,各種各樣的條件可能會導致車道變更的需要,并且由于缺乏替代方案,車道變更將是強制性的。例如,車輛將進入強制變道狀態(tài),以應對其下游車道的事故產生的阻塞。在各種情況下,車輛都需要進行強制變道,例如:
車輛位于其路徑分叉位置的“臨界距離”內,且不在連接的車道上。
事故或失速車輛阻塞了車輛的當前車道。
車道上顯示“封閉”車道使用標志。
當前車道或下游車道預留給其他車輛類型。
沒有電子收費通行證的車輛位于下游有電子收費亭的車道上。
正在縮減一條車道(即,車道連線連通性偏差小于1)。
(3)前瞻Look-Ahead
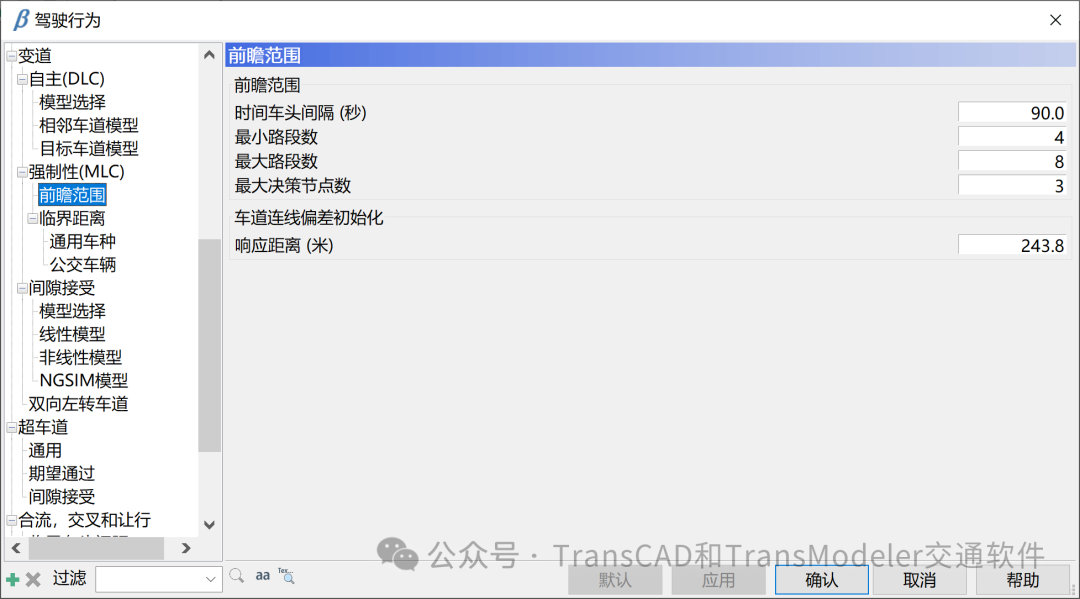
在整個仿真過程中,TransModeler都會對每輛車的下游路徑保持一個大致的“概略圖”。所有車輛在考慮換道時都會考慮這張“概略圖”。對于每輛車,這張概略圖相當于駕駛員對其下游路徑的感知。意識延伸到下游多遠取決于前瞻范圍look-ahead range。前瞻范圍是以時間為單位測量的。因此,通過計算車輛以每個路段的自由流速度行駛一段由前方距離給定的時間時的下游距離來確定前方距離。換言之,如果前瞻范圍為90秒,駕駛員將在大約90秒后意識到其路徑。在做出換道決策時,駕駛員將考慮換道對其在接下來90秒內必須執(zhí)行的操作的影響,以便保持在其路徑上。
在特殊情況下,特別是當車輛行駛在或接近一個很長的路段時,合理的前瞻時間范圍可能不足以涵蓋車輛可能需要在長路段下游執(zhí)行的移動。為了避免長路段干擾車輛的前瞻范圍,TransModeler將保證每輛車的下游路段數(shù)量最少。如果可以假設這種情況很少見或為了提高計算效率,您可能會發(fā)現(xiàn)減少這個最小路段數(shù)是有幫助的。
前瞻時,模型除了考慮轉彎或出口外,還將考慮車道減少。例如,如果車道連線的連通性偏差α小于1,則部分駕駛員(1 – α)會盡一切努力在車道結束前強制換出車道。連通性偏差可用于模擬各種情況,例如車道減少,不需要使用車道或更需要使用其他車道。但是,在駕駛員接近車道末端之前,可能無法了解或實現(xiàn)這些條件。因此,有一個參數(shù)用于控制連通性偏差開始影響強制換道決策時的響應距離。
(4)臨界距離Critical Distance
當車輛前瞻時,它將記錄在前瞻范圍內其路徑上需要變道(即轉彎、匝道出口或其他岔路口)的任何點。這些都是臨界點(關鍵點)。在這些臨界點上游的臨界距離內做出的所有車道改變決定都是強制性的。即使車輛當前處于有利的或連通的車道上,這與車輛在臨界點必須走的路徑一致,其保持在當前車道上的變道決定也是強制性的。除非存在特殊情況,如阻塞當前車道的事故,否則不會考慮其他替代方案。臨界距離因駕駛員而異:更具攻擊性的駕駛員在將自己定位在連通車道之前,可能會更愿意冒險接近臨界點;更為謹慎、保守的司機可能會在更遠的上游做出強制性的車道改變決定,以便跟隨他們的路線。
臨界距離也可能是和車輛行駛的道路設施類型相關。例如,在高速設施(如高速公路)上,臨界距離可能更長,因為當以更快的速度行駛時,必須在更長的距離上做出決定和采取行動。相反,在低速設施(如城市街道)上,臨界距離通常較短,因為可以在較短距離內做出決策和采取行動。
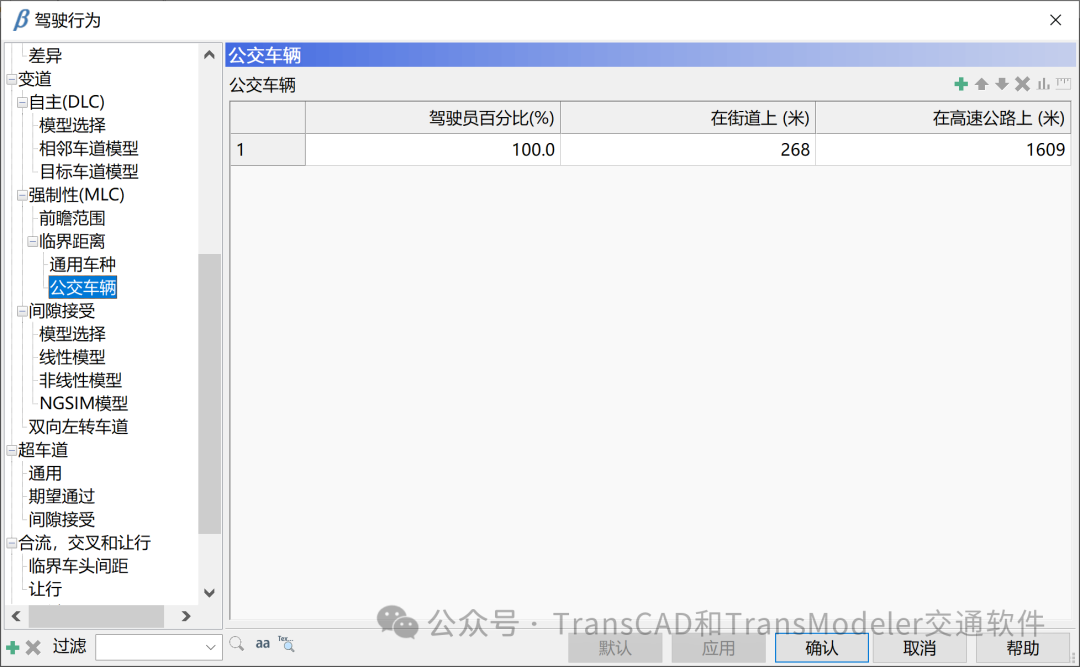
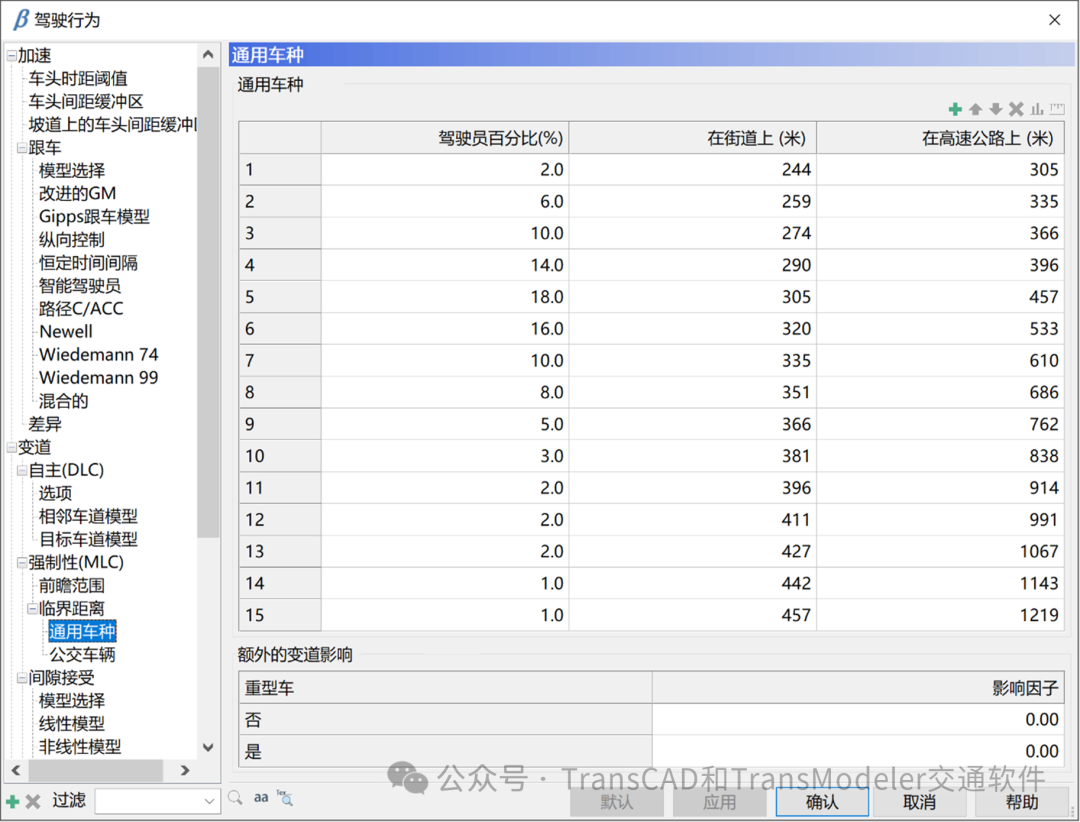
參數(shù)表包含高速公路和城市街道上的臨界距離在駕駛員中的分布。使用一組給定的臨界距離值的駕駛員百分比是明確規(guī)定的。此表定義了適用于一般車隊(即非公交車輛)的臨界距離。第二個參數(shù)表用于定義公交車輛駕駛員的分布。下面2個圖是TransModeler6.1的參數(shù)表界面。
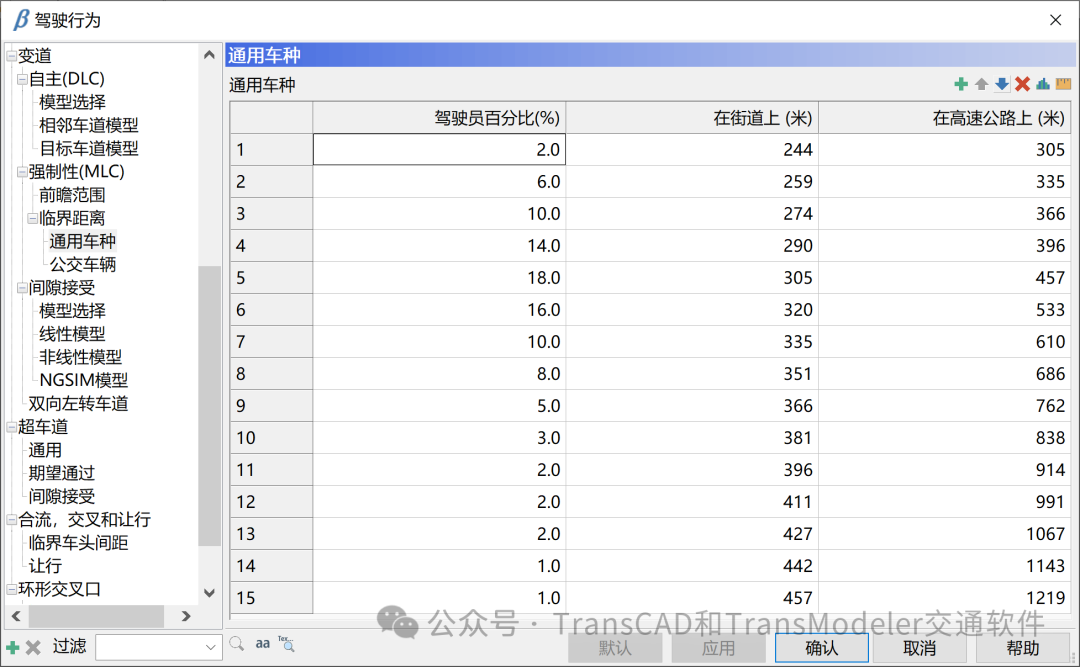
只有當車輛到下個路段的長度大于臨界距離參數(shù)時,下游車道才會在換道選擇集中。每增加一次換道,臨界距離相應增加。我們舉例子說明該參數(shù)是如何在變道模型中發(fā)揮作用的。假設臨界距離參數(shù)為400m(每個司機從隨機分布抽取一個隨機數(shù),這里假定是400m),如果車輛選擇最左側車道出發(fā),途中變道1次,則只需要提前400m做變道選擇即可;選擇左側第二車道出發(fā),途中變道2次,則需要提前800m做變道選擇;左側第三車道出發(fā),途中變道3次,則需要提前1200m做變道選擇。在本案例中,Link25-Link26-Link15-Link16-Link11100136的距離約600m,只夠做出1次變道選擇。
4
、解決方法
(1)延長路段
通過延長Link25后仿真,左轉車輛在四個左轉車道中均有分布,問題解決。由于本案例正好Link25是仿真建模的邊界,適當延長路段可以認為是合理的。但如果路段的實際距離就只有這么長,那這個辦法就不可取了。
(2)設定起點入口車道參數(shù)(Entry?Lane?at?Origin)
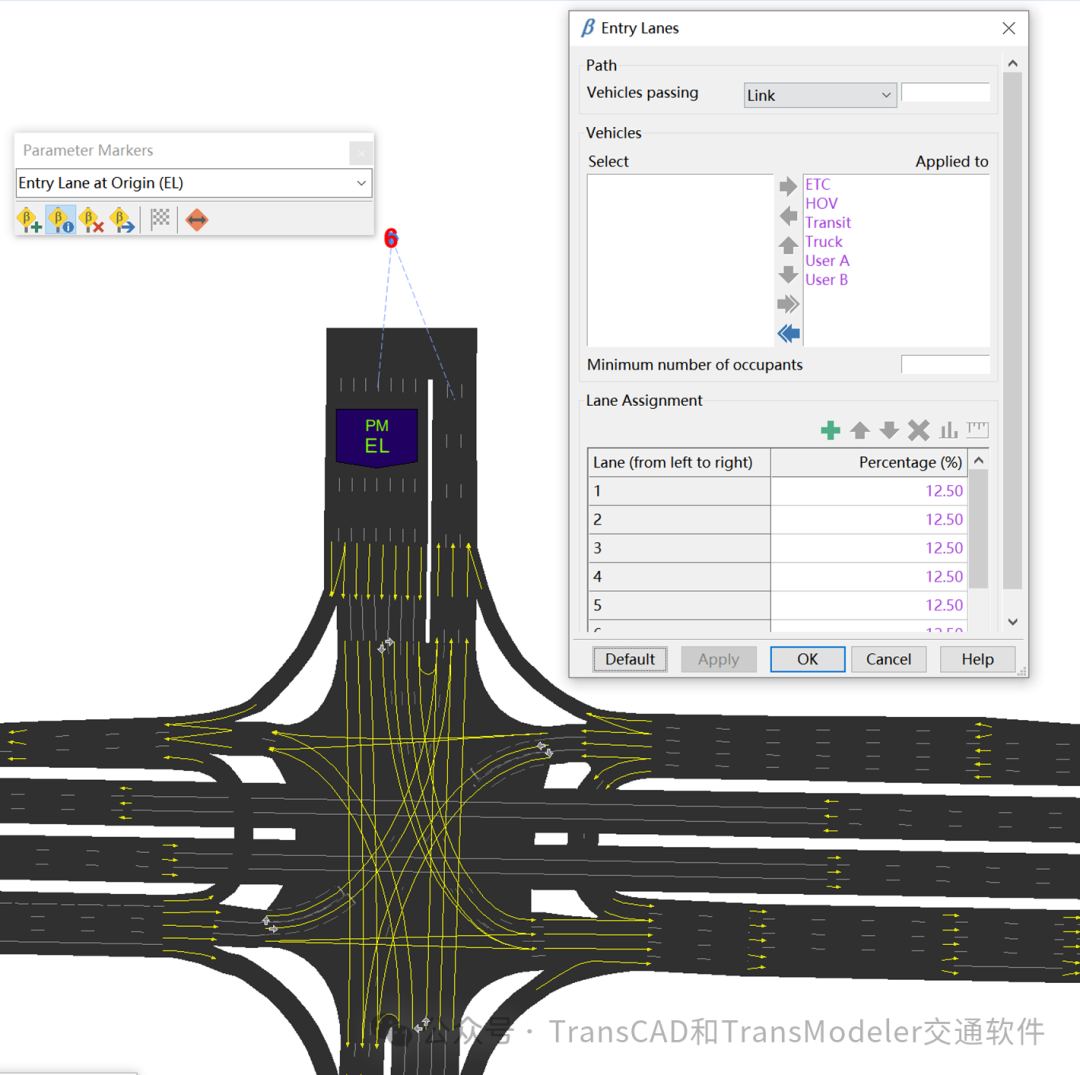
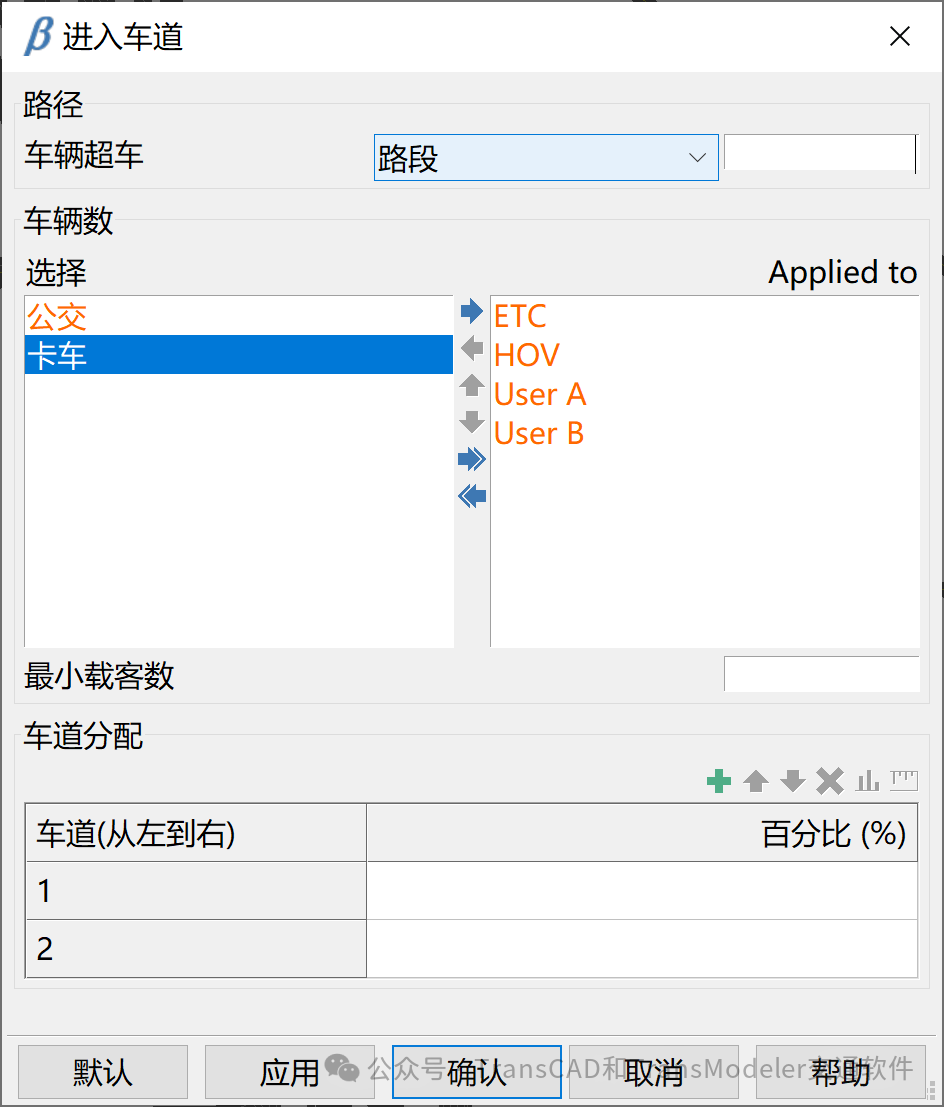
該參數(shù)作用于出行起點的路段(如本例),制定路段上不同車道的利用率。類似于宏觀模型中,設置小區(qū)形心連接線的比例。選擇 Parameters> Parameter Markers Toolbar ,從下拉菜單中選擇 Entry Lane at Origin ,對不同車型在各車道上的利用率進行設置。
運行仿真, 左轉車道的閑置問題得到解決,但是通過分析車輛的下一個轉向發(fā)現(xiàn),出現(xiàn)了新的問題,左轉車道上分布著直行、右轉車輛,與實際情況不符,問題仍未解決。
(3)修改臨界距離參數(shù)
如果縮短臨界距離全局參數(shù)值,對當前路段情況可能會有改善,但也可能會在其他地方造成駕駛行為的不合理。可以使用“參數(shù)標記”工具,在Link25設定局域參數(shù)縮短臨界距離。不過,實際應用中網絡很大,人工去設置可能也是力不從心的。
(4)完美方法,TransModeler7.0增加的功能
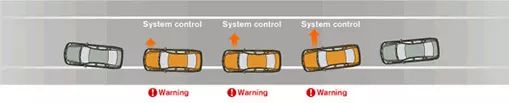
為了從根本上解決這一問題,TransModeler 7.0中新增額外的變道影響(Impact from additional lanes)參數(shù)。美國用戶用默認駕駛行為參數(shù)值1.0(TransModeler 6.1版本中為1.0),中國用戶可以選擇小于1.0的值,比如0.25,甚至0。我們將參數(shù)額外的變道影響記為α,變道次數(shù)N所需的最小距離D用公式計算 D=D0*(1.0 + α * (N - 1)),其中D0為臨界距離值。對美國用戶而言,α=1,D0=400m時,變道三次最晚在1200m處開始選擇;而對于中國用戶而言,α=0.25,D0=400m時,變道三次只需要在600m處選擇。參數(shù)α可以反映駕駛行為的激進與保守。另外,參數(shù)也區(qū)分了是否重型車。
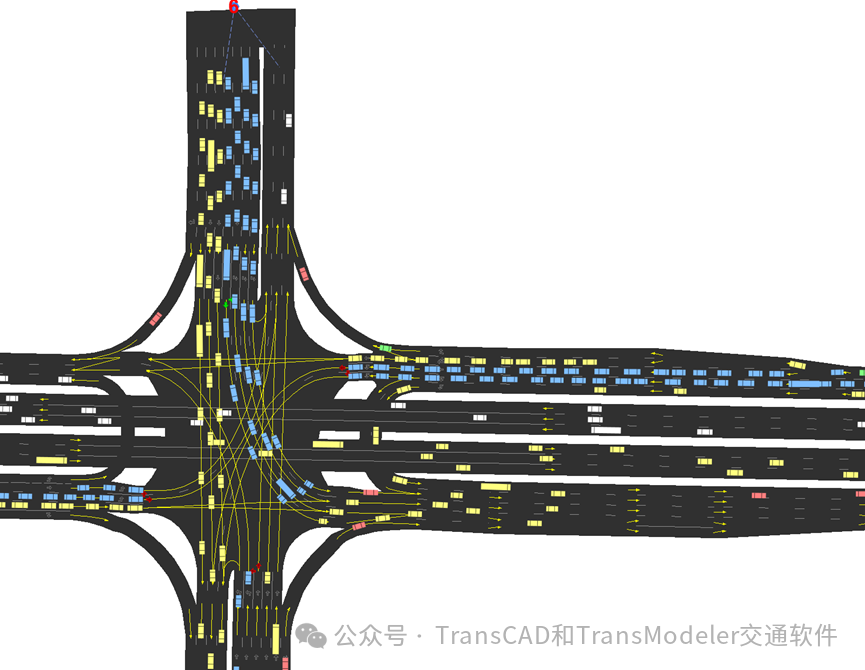
引入新的參數(shù)后,仿真瞬時界面效果如下:
審核編輯:黃飛
?













 工商網監(jiān)
工商網監(jiān)
評論