 電子發(fā)燒友App
電子發(fā)燒友App


當(dāng)你觀看一個(gè)自動(dòng)駕駛汽車行駛的視頻時(shí),你會(huì)發(fā)現(xiàn)它并沒有在下雨的情況下這樣做。道路往往是干燥的,天空中沒有雨云。因?yàn)槟壳按蟛糠肿詣?dòng)駕駛汽車還不能在雨中駕駛。
根據(jù)美國(guó)國(guó)家公路交通安全管理局(NHTSA)的數(shù)據(jù),在美國(guó),在雨天發(fā)生的交通事故幾乎占到所有由天氣引發(fā)的交通事故的近一半(約46%)。的確,下雨會(huì)給駕駛帶來更多的困難。然而,目前,大部分自動(dòng)駕駛汽車還不能在雨中駕駛。
當(dāng)你觀看一個(gè)自動(dòng)駕駛汽車行駛的視頻時(shí),你會(huì)發(fā)現(xiàn)它并沒有在下雨的情況下這樣做。道路往往是干燥的,天空中沒有雨云。考慮到在今年的大部分時(shí)間里,全國(guó)大部分地區(qū)都有雨水出現(xiàn),我們肯定需要可以在雨中正常行駛的自動(dòng)駕駛汽車。
在自動(dòng)駕駛理論控制研究所(Cybernetic Self-Driving Car Institute),我們正在致力于提升人工智能的能力,使無人駕駛汽車能夠在雨天正常行駛。
對(duì)于L5級(jí)自動(dòng)駕駛汽車,也就是駕駛水平能與人類相當(dāng)?shù)淖詣?dòng)駕駛汽車,我們希望人工智能能夠根據(jù)雨天的情況自動(dòng)駕駛汽車。對(duì)于4級(jí)自動(dòng)駕駛汽車來說,人工智能并不一定能夠使汽車在雨中行駛,或者至少可以嘗試在雨中行駛,如果它在某種程度上達(dá)到了無法繼續(xù)行駛的地步,它將把控制權(quán)交給汽車上的一名人類司機(jī)。
這種移交可能是危險(xiǎn)的,因?yàn)樽詣?dòng)駕駛汽車可能已經(jīng)陷入了一場(chǎng)真正糟糕的大雨中,而且可能打滑并失去控制。簡(jiǎn)單地把控制權(quán)交給人類司機(jī)并不一定能解決所有問題。人類可能沒有足夠的時(shí)間來處理這種情況,或者可能沒有任何辦法來擺脫這個(gè)困境。
究竟是什么使得無人駕駛汽車在雨中的行駛變得如此困難?
讓我們考慮一下與雨中駕駛相關(guān)的各個(gè)方面。
路面
被雨水打濕的路面會(huì)變得很滑,這意味著汽車輪胎的抓地力會(huì)減弱。人工智能需要能夠意識(shí)到道路是濕的,并決定如何平穩(wěn)地轉(zhuǎn)彎,或者如何最好地從靜止?fàn)顟B(tài)繼續(xù)移動(dòng),等等。如果人工智能試圖像在干燥的表面那樣加速,那么輪子將會(huì)旋轉(zhuǎn),或者汽車會(huì)打滑,所有這些都會(huì)導(dǎo)致自動(dòng)駕駛汽車及其乘坐者(以及其他車輛、行人等)陷入危險(xiǎn)處境。
水上滑行
我相信你們都記得在你們的高中駕駛課堂上,老師提醒你們?cè)谒匣袝r(shí)要小心。這描述的是輪胎和道路之間有一層水時(shí)的情況。因此,你相當(dāng)于在水面上駕駛,輪胎并不直接接觸地面。當(dāng)這種情況發(fā)生時(shí),你對(duì)汽車的控制就大大降低了。我們的人工智能已經(jīng)為這種情況做好了準(zhǔn)備,一旦它探測(cè)到正在進(jìn)行的水上滑行,它就會(huì)啟用水上滑行模式,包括減速,在滑行的情況下轉(zhuǎn)彎,避免急剎車等。人工智能還必須知道汽車的附近有什么,以及在不撞到別人或其他物體的情況下,它需要多少空間才能控制自動(dòng)駕駛汽車。
積水
自動(dòng)駕駛汽車上裝有傳感器,它們能夠觀察道路,并掃描積水。正如你所知道的,水坑中四處濺起的水花雖然有趣,但當(dāng)中可能會(huì)隱藏有坑洞,它會(huì)損壞汽車,使駕駛陷入混亂。檢測(cè)積水比想象中還要難,因?yàn)椴粌H要確定水的位置,還要測(cè)量水的深度。人工智能還需要考慮一些選擇,比如避免積水時(shí),它可以選擇變換車道,或者采取安全措施,避免進(jìn)入“護(hù)城河”。
保持在路中間或最高處行駛
在下雨的時(shí)候,人工智能會(huì)試圖將自動(dòng)駕駛汽車保持在道路的最高處或中間的位置。這是由于大部分的道路都是被設(shè)計(jì)成有一定弧度的,這能夠使得水更容易從道路上流走。你經(jīng)常在路邊看到很多深水,部分原因是水會(huì)隨重力流到這個(gè)位置。如果可行的話,人工智能會(huì)試圖讓自動(dòng)駕駛汽車遠(yuǎn)離路邊。但這并不是一個(gè)硬性規(guī)定,因?yàn)樵诙鄶?shù)情形下,路的一邊是更安全的選擇,因此這是依情況而定的。
雨中駕駛模式
在雨中駕駛時(shí),如果可行的話,人工智能會(huì)試圖比正常情況下慢一些。一般的經(jīng)驗(yàn)法則是速度應(yīng)該在正常速度的基礎(chǔ)上減少大約三分之一,比如如果在路上的正常速度是每小時(shí)55英里,那么在下雨時(shí)以每小時(shí)40英里的速度為目標(biāo)會(huì)比較安全。同樣地,汽車之間的距離應(yīng)該比正常情況下增大,允許至少三分之一的額外距離或反應(yīng)時(shí)間。人工智能還需要確保汽車前燈的開啟,這不僅能協(xié)助自動(dòng)駕駛汽車傳感器的工作,還能提醒其他司機(jī)和行人注意無人駕駛汽車的存在。
針對(duì)雨天的準(zhǔn)備措施
當(dāng)有人想要讓自動(dòng)駕駛汽車在雨中行駛時(shí),人工智能需要確定自動(dòng)駕駛汽車是否已經(jīng)做好與雨天相關(guān)的駕駛準(zhǔn)備。確定汽車是否準(zhǔn)備就緒的方式之一就是檢測(cè)輪胎壓力。對(duì)于未來的汽車來說,將會(huì)有一種方法來檢測(cè)輪胎的胎面數(shù)量(在雨中,一個(gè)裸露的胎面會(huì)很糟糕)。人工智能還可以通過傳感器的診斷來確定它們是否在工作,還可以觀察它們是否被雨遮擋住了。順便說一句,你可能會(huì)發(fā)現(xiàn),現(xiàn)在有一些公司正在制造特殊的雨刷,或者用其他方法,試圖讓自動(dòng)駕駛汽車上的傳感器不受雨、灰塵、泥土、雪等的影響。
駕駛路線
在特殊天氣條件下,自動(dòng)駕駛汽車的人工智能需要仔細(xì)考慮自動(dòng)駕駛汽車的行駛路線。由于下雨,通常會(huì)有其他的路線能夠避免進(jìn)入被淹的地區(qū)。因此,正常的最小距離或最快的路線可能不再可行。我曾多次遇到這種情況,在雨天,我按照正常的路線走,卻發(fā)現(xiàn)這條低低的路似乎馬上就被水淹了,我不得不回頭去尋找另一條路,所有這些都比我從另一種方式出發(fā)的路要長(zhǎng)得多。
車輛控制
人工智能需要意識(shí)到并能夠使用汽車上的其他自動(dòng)化,例如牽引力控制系統(tǒng),防滑功能,以及防抱死制動(dòng)系統(tǒng)(ABS)。這些功能在所有汽車上都有配備,包括自動(dòng)駕駛汽車。這些功能被人類司機(jī)使用,同樣地,人工智能也需要知道如何駕駛汽車并使用這些功能。一些人認(rèn)為這些功能將會(huì)嵌入人工智能中,但現(xiàn)在還不太可能出現(xiàn)這種情況。相反,這些功能還是會(huì)像傳統(tǒng)汽車那樣,而驅(qū)動(dòng)汽車的是人工智能,因此它可以決定是否需要在駕駛?cè)蝿?wù)中使用這些功能。
傳感器
關(guān)于無人駕駛汽車,也許人們最關(guān)心的問題之一就是傳感器。傳感器在下雨天還能正常使用嗎?
我們都知道,下雨的時(shí)候,相機(jī)就無法正常使用了。由于雨水附著,鏡頭會(huì)變得模糊不清,圖像可能會(huì)被扭曲,所以就不一定能收集到正常情況下所收集到的所有圖像。的確,正如前面提到的,現(xiàn)在有一些第三方公司正在推出專門的產(chǎn)品來幫助保持相機(jī)鏡頭的清晰。這包括微型雨刷器等創(chuàng)新技術(shù),采用某種加熱技術(shù),去除相機(jī)上的水珠。
不管你為了保持鏡頭清晰做了什么,相機(jī)還是有可能會(huì)因?yàn)橄掠晔艿接绊憽U驗(yàn)槿绱耍斯ぶ悄苄枰幚砟切┎糠植磺逦虺霈F(xiàn)其他、問題的圖像。此外,人工智能可能還需要在雨中更多地依靠其他感官設(shè)備,而不太可能只使用攝像頭。神經(jīng)網(wǎng)絡(luò)被訓(xùn)練并用于處理圖像,它也被訓(xùn)練來處理與降雨相關(guān)的圖像(一些數(shù)據(jù)集沒有降雨相關(guān)的圖像,因此神經(jīng)網(wǎng)絡(luò)無法在這些圖像中尋找特征),這一點(diǎn)非常重要。
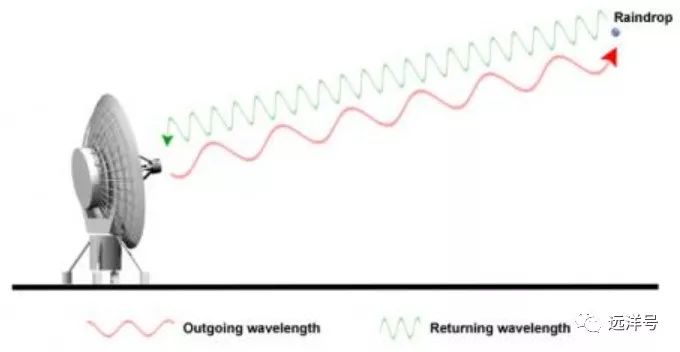
激光雷達(dá)(LIDAR)是一種類似雷達(dá)的激光,它通常是大多數(shù)自動(dòng)駕駛汽車上的一個(gè)關(guān)鍵傳感器件。關(guān)于降雨對(duì)激光雷達(dá)的影響,有很多研究。一方面,你可能會(huì)認(rèn)為發(fā)射激光的東西會(huì)在雨中遇到困難。雨滴是很小的,但可以非常有效的反射,因此可能會(huì)造成錯(cuò)誤的讀數(shù)。
研究表明,有很多方法可以解決這個(gè)問題。
例如,從統(tǒng)計(jì)上看,雨滴不應(yīng)該在同一點(diǎn)上存在很長(zhǎng)時(shí)間,因?yàn)樗谙侣洌虼巳绻す饫走_(dá)發(fā)現(xiàn)了一些出現(xiàn)并很快消失的東西,那么在這種情況下,它就能識(shí)別出那是雨滴。
同時(shí),雨滴傾向于將信號(hào)轉(zhuǎn)移到地面上,因此通過觀察地平面,我們就能知道雨對(duì)信號(hào)的作用。總的來說,研究似乎表明,隨著降雨的增加,激光雷達(dá)的強(qiáng)度會(huì)降低。無論如何,在下雨的時(shí)候,肯定有一些問題需要解決,而激光雷達(dá)的進(jìn)一步發(fā)展將需要提高其在雨中的性能(包括確保發(fā)射極表面不會(huì)被水滴所遮擋)。
其他汽車中的人類司機(jī)
我們不要忘記,自動(dòng)駕駛汽車將會(huì)和人類駕駛的汽車一樣在同一個(gè)地方行駛。我知道有些人相信烏托邦,即世界上只有自動(dòng)駕駛汽車,但這在很長(zhǎng)一段時(shí)間內(nèi)都是不可能實(shí)現(xiàn)的。所以,人工智能需要意識(shí)到,道路上的其他車輛在某些情況下是由其他人工智能驅(qū)動(dòng)的,而在某些情況下是由人工駕駛的。人工智能需要警惕那些超速行駛或過慢行駛的司機(jī),以及司機(jī)突然轉(zhuǎn)向避開水坑,以及在雨中駕駛時(shí)做最瘋狂的事情的司機(jī)。
實(shí)地駕駛
降雨時(shí),自動(dòng)駕駛汽車的人工智能將試圖避免被其他車輛所影響。換句話說,在高速公路上,在自動(dòng)駕駛汽車的前、后、左、右,以及周圍,都有很多車輛,這意味著人工智能在雨中幾乎沒有選擇的余地。它需要盡可能多的保留選擇權(quán),這需要一些非常好的駕駛技巧。在雨中變換車道會(huì)更加困難,需要更仔細(xì)的行動(dòng)。此時(shí)不建議在卡車后面行駛,因?yàn)榭ㄜ嚂?huì)從道路上帶起大量的積水。













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論