 電子發(fā)燒友App
電子發(fā)燒友App


當?shù)貢r間19日凌晨,Uber一輛自動駕駛汽車在亞利桑那州撞死了一名橫穿馬路的婦女。因是第一起自動駕駛汽車在公共道路上發(fā)生的致人身死事故,Uber一時間被推上了風口浪尖。
然而,僅幾個小時之后,負責調(diào)查此次事故的利桑那州坦佩警察局局長卻表示,根據(jù)事故的初步調(diào)查顯示,在此次交通事故中,Uber可能不存在過錯。
劇情的反轉(zhuǎn),讓人有些摸不著頭腦。
從事故現(xiàn)場視頻和Uber事故汽車的配置看,雷達和攝像頭“失職”或是原罪
為了還原事故真相,利桑那州坦佩警察局公開了一段由事故汽車拍攝的視頻。從事故現(xiàn)場視頻看,Uber的自動駕駛事故汽車(沃爾沃XC90)當時正超速行駛在一段光線環(huán)境極差,甚至可以說完全黑暗的道路上,僅有的光線來自于汽車前燈。而受害者就是這樣的環(huán)境下“突然”出現(xiàn)在了汽車前方,加之汽車行駛速度極快,瞬間就被撞倒。顯然,無論是車上的測試人員還是自動駕駛汽車,都沒能及時反應過來。
然而,人沒反應過來,自動駕駛汽車就應該反應不過來嗎?自動駕駛汽車的出現(xiàn),難道就僅在解放司機雙手,“駕駛技術”也只與人類司機持平就可以了嗎?
答案顯然是否定的。
那么,到底是什么讓Uber的這輛自動駕駛汽車“失職”的?解答這一問題之前,我們有必要了解一下,這輛事故車到底是如何做到自動駕駛的。
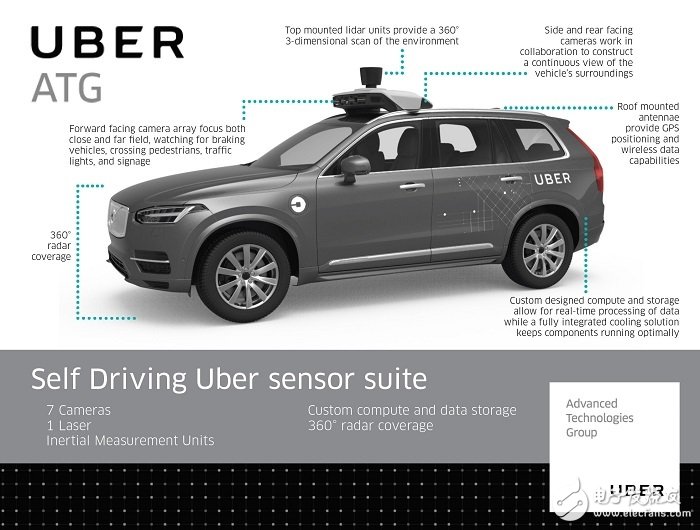
根據(jù)事故現(xiàn)場圖片看,Uber的這輛事故自動駕駛汽車正是由其ATG(Uber先進技術部門)研發(fā)的。依據(jù)Uber此前公開的相關信息,該汽車應是配備了一整套的傳感器系統(tǒng):
頂部激光雷達,能夠以每秒多次的速度生成汽車周圍的3D成像;
前端無線電波雷達,位于汽車前后,可實現(xiàn)360度無死角的探測;
短焦和長焦光學相機,對成像進行實時分析。
很顯然,Uber是希望能夠通過這一套傳感器系統(tǒng)做到實時、全范圍探測的,但事故還是發(fā)生了。
這種情況下,造成事故最大的可能就是各傳感器自身性能不足以及搭配方案不合理。甚至可以說,正是因為頂部、前端雷達與攝像頭圖像處理協(xié)作不善,才導致了這場事故的發(fā)生。
自動駕駛汽車想要安全上路,需要先了解各傳感器特性及不足
對于Uber此次事故,美國國家運輸安全委員會前主席馬克·羅森克表示,這起事故或成自動駕駛技術未來發(fā)展的一個阻礙,必須設法解決其中的問題,才能重獲公眾對自動駕駛汽車的信任。顯然,雷達和攝像頭就是這些問題的重中之重。
雷達
雷達方面,當前已在自動駕駛領域廣泛應用的有三種:激光雷達、超聲波雷達和毫米波雷達。
激光雷達
激光雷達,也稱Lidar,就是激光(Laser)與雷達(Radar)的集合,通常有16線、32線和64線,線束越多,性能越強。
激光雷達,工作在紅外和可見光波段,其探測精度很高,探測范圍也很廣,能夠再短時間內(nèi)區(qū)分障礙物除此之外,還可在光線條件差的環(huán)境中正常運行。
但其易被環(huán)境中“雜物”干擾,所以在雨雪等極短天氣中性能較差,無法提供全天候服務。此類雷達成本極高,因此,一輛汽車上通常只配備一個,且位于頂部。
超聲波雷達
超聲波雷達,通過發(fā)射近距離超聲波及收集、分析反射數(shù)據(jù)的方式進行探測。此類雷達能量消耗較緩慢,穿透性強,在短距離測量中,具有非常大的優(yōu)勢。此外,因其測距的方法簡單,所以該類雷達成本很低。
除去自動駕駛,超聲波雷達在汽車領域早有廣泛應用,如警示周邊3米以內(nèi)的障礙物,幫助駕駛員停車等。
毫米波雷達
毫米波雷達,是工作在毫米波波段探測的雷達,可穿透霧、煙、灰塵,具有全天候(大雨天除外)、全天時的特點,對金屬異常敏感。而由于毫米波短波長對應的光學區(qū)尺寸較小,其更適用于30km以下的近距離探測,但也只能做到識別出前方有一團東西,不知道具體是什么。
因為成本低,且技術相對成熟,毫米波雷達是當前自動駕駛傳感器中應用最普遍的。

攝像頭
相較于雷達,攝像頭較為簡單,其主要功能就是借由鏡頭采集圖像,再通過攝像頭內(nèi)的感光組件電路及控制組件對圖像進行處理并轉(zhuǎn)化為電腦能處理的數(shù)字信號,從而實現(xiàn)感知車輛周邊的路況情況,實現(xiàn)前向碰撞預警,車道偏移報警和行人檢測等功能。
當前,車載攝像頭有單目攝像頭、后視攝像頭、立體攝像頭和環(huán)視攝像頭四大類。其中,市場上主要以單目攝像頭為主。
縱觀各大自動駕駛汽車,大多選擇的是混合搭配上述設備的方案,以形成一套完整的傳感探測系統(tǒng)。如撞人致死的Uber自動駕駛汽車,其頂部就配備了一個Uber自家的激光雷達,前后也配備了多個無線電波雷達以及短程和長程光學相機。
雖然尚不知曉Uber自研激光雷達和使用的其他傳感器真實性能如何,但可以肯定的是,除去出傳感器自身性能有限之外,Uber自動駕駛汽車在這種搭配方案之下,依就發(fā)生了事故,該方案就一定沒能做到360度無死角探測,才不足以保證汽車在光線環(huán)境較差、極端天氣等情況下正常行駛的。
那么,怎樣的搭配方案才是最合理,能最大程度上避免安全事故的發(fā)生呢?
特斯拉以攝像頭為主,百度以雷達為主,各有利弊
和Uber一樣,特斯拉也非常熱衷于自動駕駛汽車的研發(fā)與路測。2016年10月20日,馬斯克宣布將為所有的特斯拉新車搭載“具有完全自動駕駛功能”的硬件系統(tǒng)——Autopilot 2.0,其大致的搭配如下:
1.車頭6個、車尾6個,共12個超聲波傳感器;
2.前擋風玻璃下內(nèi)后視鏡上端長焦、標準、短焦共3個前視攝像頭;
3.外后視鏡前端翼子板后端兩側(cè)共2個后測視攝像頭;
4.前后門中柱靠上端兩側(cè)共2個側(cè)視攝像頭;
5.后窗上部中間1個后視攝像頭;
6.后車牌位置上一個倒車攝像頭;
7.前保險杠中部1個毫米波雷達。

很明顯的,特斯拉的硬件系統(tǒng)滯后于Uber,由毫米波雷達+攝像頭+超聲波傳感器組成。從這一搭配看,整體投入成本較低,不僅沒有激光雷達加持,還以攝像頭為主,全自動無人駕駛系統(tǒng)售價僅8000美元。
可以說,該系統(tǒng)不具備在弱光線環(huán)境下進行探測的性能,也無法為汽車提供遠距離探測服務。可能正是因為這樣,特斯拉自動駕駛汽車的路測和應用才一直不是很順利。
回到國內(nèi),在自動駕駛領域,百度無人車近期可謂是風頭正勁,更是在前幾天拿到了北京市首批自動駕駛測試試驗用臨時號牌,并在北京亦莊正是開啟了自動駕駛汽車上路測試。
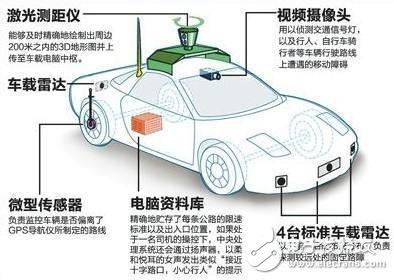
從這張網(wǎng)傳的百度無人車硬件配置圖看,百度的傳感器系統(tǒng)以雷達為主+攝像頭為輔的搭配方式,來實現(xiàn)自動駕駛的,包括一個車頂?shù)腣elodyne激光雷達;多個車載雷達,分布于汽車前后端;一個攝像頭,用于偵測移動障礙物。
這種搭配方式,實現(xiàn)了汽車遠距離大范圍探測。除此之外,相較于特斯拉,由于有了Velodyne激光雷達(單價約7萬美元)的加持,讓百度自動駕駛汽車具備了在暗光、密集環(huán)境中的行駛功能。當然,成本也相對較高。
搭配方案應因地制宜,適配應用場景才是重點
其實,上面這些也僅僅是基于普通應用場景對汽車自動駕駛性能的一個基礎判斷。無論是Uber、特斯拉還是百度,在當前的路測階段,他們都還不能保證,自家自動駕駛汽車能在任何環(huán)境中做到安全行駛。
舉個例子,在高速公路上,由于車速較快且視野較開闊,自動駕駛汽車就需要具備遠距離、大范圍探測的能力。而由于行駛道路的開放性,難免會遇到雨雪、大霧等極端天氣,那么,普通的攝像頭和高成本的激光雷達就無法負荷這一需求,這種情況下,諸如百度那樣的硬件系統(tǒng)就不實用了。
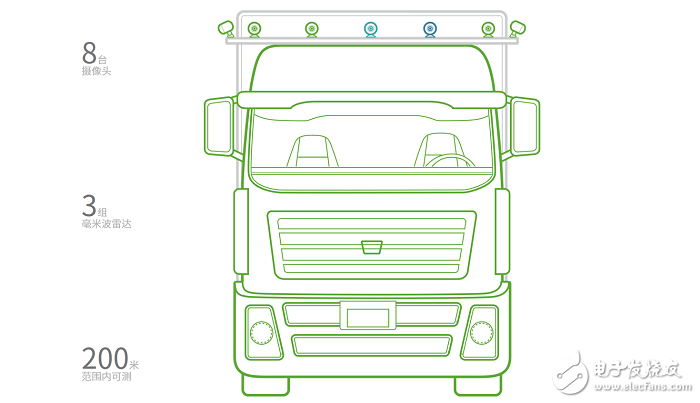
“在高速公路的高速行駛中,因激光雷達的射距問題,我們更依賴攝像頭。”圖森未來聯(lián)合創(chuàng)始人&CEO陳默表示。
因此,致力于打造高速場景下的L4級別(SAE)自動駕駛卡車的圖森未來,其傳感器搭配方案就以遠距離、高感知的攝像頭為主。一輛卡車上,共搭載了8個攝像頭、3組毫米波雷達,適用范圍達200米。
除高速公路之外,城市街道也是未來自動駕駛汽車最大的應用場景之一。而在這一場景下,遠距離大范圍探測就無法滿足實際需求了。
中國的城市街道特點,在于人群、車輛、建筑物密集;信號燈、指示牌繁多等。想要在這樣的環(huán)境下做大安全自動駕駛,汽車就必須具備實時精準探測、高度感知環(huán)境(環(huán)境光、障礙物具體細節(jié)及狀態(tài)等)以及高速識別分析圖像的能力。這種情況下,這有攝像頭和毫米波雷達就有些不夠用了,必須搭載高精度激光雷達,甚至不止一個。
“目前自動駕駛汽車搭載激光雷達,大部分是為了滿足功能性需求。”速騰聚創(chuàng)COO邱純潮說,“那么要保證安全,就必須強調(diào)安全冗余通過多重備份來增加系統(tǒng)的可靠性),Cruise就是用了5個激光雷達來解決這一問題的。”










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論