在這篇文章中,分享一些最常用的機(jī)器學(xué)習(xí)算法。
2017-10-14 14:24:00 8793
8793 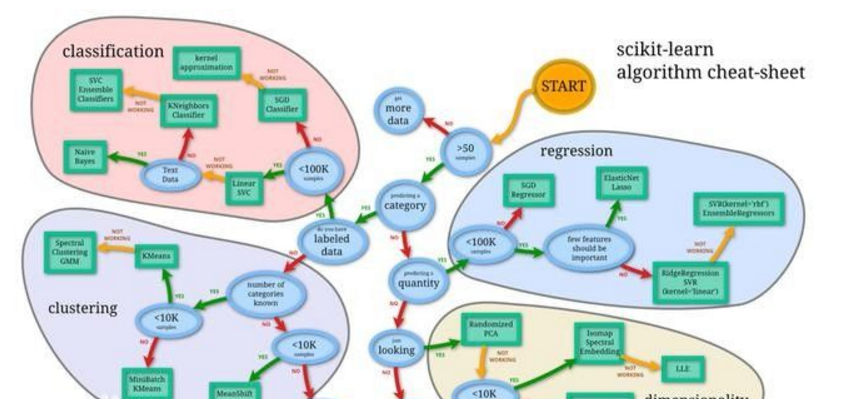
?為什么?(提示:空間復(fù)雜度)25. 為了構(gòu)建一個(gè)機(jī)器學(xué)習(xí)模型,你準(zhǔn)備了 100 個(gè)數(shù)據(jù)點(diǎn)和 5 種特征。為了減少偏差,你又引入了 5 個(gè)特征變量,并且又收集了 100 個(gè)數(shù)據(jù)點(diǎn)。請(qǐng)解釋這種方法是否正確。(提示:機(jī)器學(xué)習(xí)會(huì)遇到的(維度)災(zāi)難,你聽說過嗎?)`
2018-09-29 09:39:54
梯度下降法對(duì)最小二乘法形式的誤差函數(shù)進(jìn)行優(yōu)化。優(yōu)點(diǎn):實(shí)現(xiàn)簡(jiǎn)單,計(jì)算簡(jiǎn)單;缺點(diǎn):不能擬合非線性數(shù)據(jù)。4.最近鄰算法優(yōu)點(diǎn):1)對(duì)數(shù)據(jù)沒有假設(shè),準(zhǔn)確度高;2)可用于非線性分類;3)訓(xùn)練時(shí)間復(fù)雜度為O(n
2017-12-02 15:40:40
機(jī)器學(xué)習(xí)算法(1)——Logistic Regression
2020-06-09 13:30:03
機(jī)器學(xué)習(xí)算法如何用于制造無人駕駛汽車
2021-03-18 06:27:18
機(jī)器學(xué)習(xí) - 期望最大(EM)算法
2020-05-21 14:31:34
機(jī)器學(xué)習(xí):高級(jí)算法課程學(xué)習(xí)總結(jié)
2020-05-05 17:17:16
表征學(xué)習(xí)算法,特別針對(duì)節(jié)點(diǎn)數(shù)量巨大、且節(jié)點(diǎn)特征豐富的圖做了優(yōu)化。如下圖所示,GraphSAGE計(jì)算過程可分為三個(gè)主要步驟:圖 3:GraphSAGE算法的視覺表述鄰節(jié)點(diǎn)采樣:用于降低復(fù)雜度,一般采樣2
2020-10-20 09:48:39
關(guān)于機(jī)器學(xué)習(xí)的相關(guān)算法。正版資源,免費(fèi)看的。
2017-08-24 22:14:36
復(fù)雜,而欠擬合表示采用的模型比真實(shí)的數(shù)據(jù)分布要簡(jiǎn)單。在統(tǒng)計(jì)學(xué)習(xí)框架下,大家刻畫模型復(fù)雜度的時(shí)候,有這么個(gè)觀點(diǎn),認(rèn)為Error = Bias + Variance。這里的Error大概可以理解為模型的預(yù)測(cè)
2016-09-27 10:48:01
這篇文檔展示了幾個(gè)機(jī)構(gòu)關(guān)于JEM軟件復(fù)雜度的增加情況的看法,特別提出來創(chuàng)立一個(gè)新的Ad-hoc組,研究降低軟件一般性復(fù)雜度的可能方法。
2019-07-19 08:25:10
工作的復(fù)雜度和工作量,即使他已經(jīng)經(jīng)過移植。作為我的數(shù)據(jù)集的一部分,我收集了kicad項(xiàng)目。我希望收集社會(huì)人士的意見,以支持我的評(píng)估。我很感謝你的幫助和回應(yīng)!基于掃描工具,移植的復(fù)雜性被確定為困難,項(xiàng)目
2023-09-11 17:06:03
`1.機(jī)器學(xué)習(xí)簡(jiǎn)介:機(jī)器學(xué)習(xí)是計(jì)算機(jī)科學(xué)與人工智能的重要分支領(lǐng)域. 本書作為該領(lǐng)域的入門教材,在內(nèi)容上盡可能涵蓋機(jī)器學(xué)習(xí)基礎(chǔ)知識(shí)的各方面。 為了使盡可能多的讀者通過本書對(duì)機(jī)器學(xué)習(xí)有所了解, 作者試圖
2017-06-01 15:49:24
電子發(fā)燒友總結(jié)了以“算法”為主題的精選干貨,今后每天一個(gè)主題為一期,希望對(duì)各位有所幫助!(點(diǎn)擊標(biāo)題即可進(jìn)入頁面下載相關(guān)資料)經(jīng)典算法大全(51個(gè)C語言算法+單片機(jī)常用算法+機(jī)器學(xué)十大算法)11種常見
2019-05-09 17:06:40
的性能。2.機(jī)器學(xué)習(xí)是對(duì)能通過經(jīng)驗(yàn)自動(dòng)改進(jìn)的計(jì)算機(jī)算法的研究。3.機(jī)器學(xué)習(xí)是用數(shù)據(jù)或以往的經(jīng)驗(yàn),以此優(yōu)化計(jì)算機(jī)程序的性能標(biāo)準(zhǔn)。機(jī)器學(xué)習(xí)算法可以分成下面幾種類別:?監(jiān)督學(xué)習(xí):從給定的訓(xùn)練數(shù)據(jù)集中學(xué)習(xí)出一
2017-06-23 13:51:15
摘 要 針對(duì)跳頻信號(hào)分選提出了采用“復(fù)合信息熵”定量評(píng)估電磁環(huán)境復(fù)雜度的方法。“復(fù)合信息熵”分三個(gè)部分:類型熵、密度熵、分布熵,綜合考慮了電磁環(huán)境中包含的信號(hào)類型數(shù)、跳頻跳速、跳頻電臺(tái)數(shù)目和信道
2011-07-11 22:35:06
一個(gè)復(fù)雜的字段,那么您可能會(huì)問: 為什么一個(gè)人要費(fèi)心將不復(fù)雜的字段復(fù)雜化呢?為什么不堅(jiān)持我們經(jīng)典的算法計(jì)算方法呢?答案是,傾向于機(jī)器學(xué)習(xí)的一類問題往往不能通過純算法的方法來表達(dá)。沒有一種簡(jiǎn)單的算法可以
2022-06-21 11:06:37
體現(xiàn)在運(yùn)行該算法所需要的計(jì)算機(jī)資源的多少,所需的資源越少,則該算法的復(fù)雜度越低。算法的復(fù)雜度包括算法的時(shí)間復(fù)雜度和算法的空間復(fù)雜度。
2017-03-04 13:15:26
提出了一種改進(jìn)的TURBO碼算法,該算法改進(jìn)了傳統(tǒng)算法的路徑度量的運(yùn)算和可靠度的運(yùn)算,可以顯著地減少TURBO解碼器使用的硬件資源,存儲(chǔ)器的使用是傳統(tǒng)算法的一半。根據(jù)改進(jìn)的算法,該文還提出了一種
2009-06-14 00:18:25
各種排序算法的時(shí)間空間復(fù)雜度、穩(wěn)定性一、排序算法分類:二、排序算法比較:注:1、歸并排序可以通過手搖算法將空間復(fù)雜度降到O(1),但是時(shí)間復(fù)雜度會(huì)提高。2、 基數(shù)排序時(shí)間復(fù)雜度為O(N*M),其中N
2021-12-21 07:48:25
【作者】:蔡夢(mèng);張科峰;鄒雪城;吳蘭春;【來源】:《華中科技大學(xué)學(xué)報(bào)(自然科學(xué)版)》2010年03期【摘要】:為了解決傳統(tǒng)信噪比估計(jì)算法在多徑信道下性能顯著降低且復(fù)雜度較高的問題,提出一種基于空子
2010-04-23 11:51:46
【正文快照】:0引言幀內(nèi)編碼利用相鄰像素塊之間的相關(guān)[1]來減少視頻圖像的空間冗余度,提高了編碼效率。但是在H.264/AVC的幀內(nèi)預(yù)測(cè)采用全搜索算法中,為了確定一個(gè)宏塊的最優(yōu)預(yù)測(cè)模式,要遍歷色度塊和亮度塊的17種預(yù)測(cè)模式,計(jì)算率失真代價(jià)值的并比較大小,是造成H.264運(yùn)算復(fù)雜度大的主要原因,全文下載
2010-05-06 09:01:59
基于線性預(yù)測(cè)的FIR自適應(yīng)語音濾波器的系統(tǒng)結(jié)構(gòu)由那幾部分組成?如何降低LMS算法的計(jì)算復(fù)雜度,加快程序在DSP上運(yùn)行的速度,實(shí)現(xiàn)DSP?
2021-04-12 06:27:49
安川機(jī)器人伺服電機(jī)維修,常見機(jī)器人伺服電機(jī)故障和維修方法1、安川機(jī)器人伺服電機(jī)在很低的速度運(yùn)行時(shí),時(shí)快時(shí)慢,象爬行 一樣,怎么辦? 伺服電機(jī)出現(xiàn)低速爬行現(xiàn)象一般是由于系統(tǒng)增益太低引起的, 請(qǐng)調(diào) 整
2020-06-30 17:54:21
創(chuàng)客學(xué)院在這里和讀者介紹嵌入式視頻教程之軟硬件關(guān)系的復(fù)雜度? 嵌入式視頻教程之軟硬件關(guān)系的復(fù)雜度: 嵌入式系統(tǒng)通常是一個(gè)包含微處理器的特殊計(jì)算機(jī)系統(tǒng),是一個(gè)較大系統(tǒng)或設(shè)備的組成部分,它在很大程度
2017-06-27 09:30:28
創(chuàng)客學(xué)院在這里和讀者介紹嵌入式視頻教程之軟硬件關(guān)系的復(fù)雜度? 嵌入式視頻教程之軟硬件關(guān)系的復(fù)雜度: 嵌入式系統(tǒng)通常是一個(gè)包含微處理器的特殊計(jì)算機(jī)系統(tǒng),是一個(gè)較大系統(tǒng)或設(shè)備的組成部分,它在很大程度
2017-06-29 16:03:52
創(chuàng)客學(xué)院在這里和讀者介紹嵌入式視頻教程之軟硬件關(guān)系的復(fù)雜度? 嵌入式視頻教程之軟硬件關(guān)系的復(fù)雜度: 嵌入式系統(tǒng)通常是一個(gè)包含微處理器的特殊計(jì)算機(jī)系統(tǒng),是一個(gè)較大系統(tǒng)或設(shè)備的組成部分,它在很大程度
2017-07-05 09:59:28
機(jī)器學(xué)習(xí)算法的分類是棘手的,有幾種合理的分類,他們可以分為生成/識(shí)別,參數(shù)/非參數(shù),監(jiān)督/無監(jiān)督等。 例如,Scikit-Learn的文檔頁面通過學(xué)習(xí)機(jī)制對(duì)算法進(jìn)行分組。這產(chǎn)生類別如:1
2019-09-22 08:30:00
原理->微機(jī)原理->軟件工程,編譯原理,數(shù)據(jù)庫數(shù)據(jù)結(jié)構(gòu)1.時(shí)間復(fù)雜度時(shí)間復(fù)雜度是指執(zhí)行算法所需要的計(jì)算工作量,因?yàn)檎麄€(gè)算法的執(zhí)行時(shí)間與基本操作重復(fù)執(zhí)行的...
2021-07-22 10:01:13
小弟從未畫過4層及以上的板,不知哪位大神能傳份復(fù)雜度一般的工程給小弟參考參考。感激不盡!我的郵箱87906234@qq.com。在此謝過
2019-07-09 00:36:27
本文參考IEEE 802.16d物理層幀結(jié)構(gòu),提出了一種低復(fù)雜度的幀同步和定時(shí)同步聯(lián)合算法,該算法可在FPGA上利用較少資源來實(shí)現(xiàn)。
2021-05-06 06:23:10
表1列出了常遇到的機(jī)械機(jī)構(gòu)故障,供參考。 表1 常見機(jī)械機(jī)構(gòu)故障
2018-09-06 10:44:35
職位描述:1. 負(fù)責(zé)計(jì)算機(jī)視覺&機(jī)器學(xué)習(xí)(包括深度學(xué)習(xí))算法的開發(fā)與性能提升,負(fù)責(zé)下述研究課題中的一項(xiàng)或多項(xiàng),包括但不限于:人臉識(shí)別、檢測(cè)、活體、跟蹤、分類、語義分割、深度估計(jì)、圖像處理
2017-12-07 14:34:41
基于可靠性更新的低復(fù)雜度B譯碼算法:基于部分符號(hào)更新策略的BP (Belief Propagation)譯碼算法減少了LDPC (Low-Density Parity-Check)碼的譯碼運(yùn)算量,提高了譯碼效率。然而在其譯碼過程中,由
2009-10-29 13:09:21 16
16 MIMO 系統(tǒng)中,球形譯碼可以在保證接近ML 檢測(cè)性能的前提下大大降低檢測(cè)復(fù)雜度。但當(dāng)信道矩陣條件數(shù)很高時(shí),球形譯碼的復(fù)雜度仍然會(huì)很高。在分析了這一現(xiàn)象的原因后,本文提出
2009-11-21 13:52:078 本文分析了現(xiàn)有的基于導(dǎo)頻的MIMO-OFDM信道估計(jì)技術(shù),提出了一種低復(fù)雜度的信道估計(jì)閾值算法,這種算法與采用維納濾波器的估計(jì)技術(shù)相比較,具有計(jì)算復(fù)雜度低,適應(yīng)性好的特點(diǎn)
2010-02-21 11:51:4821 針對(duì)多輸入多輸出(MIMO)系統(tǒng)中現(xiàn)行的馬爾科夫鏈蒙特卡洛(MCMC)檢測(cè)算法復(fù)雜度較高的問題,提出了一種SIC-MMSE算法輔助的MCMC檢測(cè)算法,信號(hào)的預(yù)估計(jì)值和軟信息均作為軟輸入軟輸出(SISO)
2010-09-12 10:37:1818 摘要! 以利用投影特征將二維數(shù)據(jù)簡(jiǎn)化為一維的算法為基礎(chǔ)! 提出了一種基于平移量的機(jī)器 人灰度圖像匹配算法!以減少計(jì)算時(shí)間并提高計(jì)算效率 本算法實(shí)時(shí)性強(qiáng)!時(shí)間復(fù)雜度小 經(jīng)過實(shí)驗(yàn)
2011-03-29 16:43:2236 在描述置信傳播(BP)譯碼算法基礎(chǔ)上, 研究和分析了兩種降低復(fù)雜度的譯碼算法。Min.Sum 算法主要討論了簡(jiǎn)化校驗(yàn)節(jié)點(diǎn)的消息更新運(yùn)算,并應(yīng)用密度進(jìn)化方法對(duì)此算法進(jìn)行極限性能分析
2012-03-31 15:22:037 基于RNS的低復(fù)雜度DDS的設(shè)計(jì)與實(shí)現(xiàn)_張鳳君
2017-01-08 10:11:410 基于復(fù)雜度分析的改進(jìn)A_算法飛行器航跡規(guī)劃_叢林虎
2017-03-17 15:11:490 電子發(fā)燒友網(wǎng)站提供《細(xì)數(shù)幾種常見的自動(dòng)駕駛中的機(jī)器學(xué)習(xí)算法.docx》資料免費(fèi)下載
2017-09-22 14:13:502 本文將簡(jiǎn)要介紹Spark機(jī)器學(xué)習(xí)庫(Spark MLlibs APIs)的各種機(jī)器學(xué)習(xí)算法,主要包括:統(tǒng)計(jì)算法、分類算法、聚類算法和協(xié)同過濾算法,以及各種算法的應(yīng)用。 你不是一個(gè)數(shù)據(jù)科學(xué)家。根據(jù)
2017-09-28 16:44:431 偏差和方差與模型復(fù)雜度的關(guān)系使用下圖更加明了: 當(dāng)模型復(fù)雜度上升的時(shí)候,偏差會(huì)逐漸變小,而方差會(huì)逐漸變大。 常見算法優(yōu)缺點(diǎn) 1.樸素貝葉斯 樸素貝葉斯屬于生成式模型(關(guān)于生成模型和判別式模型,主要
2017-09-29 16:18:197 算法進(jìn)行實(shí)驗(yàn),研究圖像的復(fù)雜度差異對(duì)信息隱藏性能的影響。實(shí)驗(yàn)結(jié)果表明了所提復(fù)雜度評(píng)價(jià)方法的有效性以及復(fù)雜度分類的合理性,依據(jù)圖像復(fù)雜度準(zhǔn)則對(duì)載體進(jìn)行分類后,圖像復(fù)雜度差異對(duì)隱藏性能有明顯影響,復(fù)雜度較低的
2017-11-14 09:57:475 機(jī)器學(xué)習(xí)很大程度上就像軟件工程一樣,比如我現(xiàn)在要實(shí)現(xiàn)一個(gè)key-value的數(shù)據(jù)庫,那么有很多種模式都可以實(shí)現(xiàn),但是他們最終所達(dá)到的效果卻是千差萬別的。同樣,在機(jī)器學(xué)習(xí)領(lǐng)域,如果我想實(shí)現(xiàn)一個(gè)分類
2017-11-15 19:20:28554 足錯(cuò)線性復(fù)雜度是度量序列密碼安全性的重要指標(biāo)之一。基于方體理論和Games-Chan算法的逆向推導(dǎo)提出構(gòu)造方法,構(gòu)造了具有給定足錯(cuò)線性復(fù)雜度譜的2周期序列。首先使用標(biāo)準(zhǔn)方體分解算法對(duì)忌錯(cuò)線性復(fù)雜度
2017-11-23 17:17:000 部分傳輸序列( PTS)方法的基礎(chǔ)上根據(jù)系統(tǒng)特性進(jìn)行改進(jìn),得到迭代PTS(IPTS)算法,較傳統(tǒng)PTS算法計(jì)算復(fù)雜度有明顯降低;其次,將IPTS算法與限幅(Clipping)算法相結(jié)合,作為一種新的IPTS-Clipping聯(lián)合算法應(yīng)用在FBMC-OQAM系統(tǒng)中,該算法先利用ilyrs算法對(duì)FBMC信號(hào)進(jìn)行處
2017-11-28 17:21:480 復(fù)雜度。結(jié)果表明該序列有較好的線性復(fù)雜度。 本篇文章,我們構(gòu)造了一類廣義三元分圓序列,計(jì)算出該序列的自相關(guān)值和線性復(fù)雜度。結(jié)果表明這類序列有較高的線性復(fù)雜度。類似于定理5和定理10的計(jì)算過程,我們可以計(jì)算當(dāng)廠為奇數(shù)時(shí)該序
2017-12-18 16:45:410 移動(dòng)通信設(shè)備由于計(jì)算資源有限,對(duì)計(jì)算復(fù)雜度較為敏感。我國(guó)自主研發(fā)提出的移動(dòng)音頻編解碼算法標(biāo)準(zhǔn)AVS PlO中的帶寬擴(kuò)展算法有利于提高移動(dòng)音頻編解碼質(zhì)量,但其計(jì)算復(fù)雜度較高,不利于該編解碼算法在移動(dòng)
2017-12-25 11:32:201 機(jī)器學(xué)習(xí)起源于人工智能,可以賦予計(jì)算機(jī)以傳統(tǒng)編程所無法實(shí)現(xiàn)的能力,比如飛行器的自動(dòng)駕駛、人臉識(shí)別、計(jì)算機(jī)視覺和數(shù)據(jù)挖掘等。機(jī)器學(xué)習(xí)的算法很多。很多時(shí)候困惑人們的是,很多算法是一類算法,而有些算法又是
2018-01-05 17:36:103101 
量子機(jī)器學(xué)習(xí)(Quantum ML)是量子力學(xué)和機(jī)器學(xué)習(xí)的一門交叉學(xué)科。兩者間像一種共生關(guān)系,我們可以利用量子計(jì)算的力量生成機(jī)器學(xué)習(xí)算法的量子版本,并應(yīng)用經(jīng)典機(jī)器學(xué)習(xí)算法分析量子系統(tǒng)。
2018-01-24 11:33:365561 就是設(shè)計(jì)出計(jì)算復(fù)雜度低并且檢測(cè)性能好的信號(hào)檢測(cè)算法。在MIMO系統(tǒng)中,最佳檢測(cè)方案是極大似然檢測(cè)( Maximum Likelihood Detector,MLD)方案。但是,隨著天線數(shù)量的增加,最大似然檢測(cè)
2018-01-29 10:46:390 機(jī)器學(xué)習(xí)無疑是當(dāng)前數(shù)據(jù)分析領(lǐng)域的一個(gè)熱點(diǎn)內(nèi)容。很多人在平時(shí)的工作中都或多或少會(huì)用到機(jī)器學(xué)習(xí)的算法。這里小編為您總結(jié)一下常見的機(jī)器學(xué)習(xí)算法,以供您在工作和學(xué)習(xí)中參考。
2018-02-02 17:20:461552 
商湯科技算法平臺(tái)團(tuán)隊(duì)和北京大學(xué)高能效實(shí)驗(yàn)室聯(lián)合提出一種基于 FPGA 的快速Winograd算法,可以大幅降低算法復(fù)雜度,改善 FPGA 上的 CNN 性能。
2018-02-07 11:52:068687 
針對(duì)不同的視頻內(nèi)容造成編碼前幾幀質(zhì)量低下的問題,提出一種基于I幀復(fù)雜度的初始量化參數(shù)( QP)選擇算法。在編碼前利用解碼碼流中得到的I幀宏塊模式信息,運(yùn)用宏塊中的3種不同幀內(nèi)預(yù)測(cè)模式判斷I幀的復(fù)雜度
2018-02-07 14:06:580 一種基于線性注水原理的低復(fù)雜度功率分配算法。該算法通過快速排除信道條件較差的協(xié)作用戶,并利用各協(xié)作用戶功率值之間的線性遞推關(guān)系式,將最優(yōu)功率分配算法中的迭代運(yùn)算轉(zhuǎn)化為線性運(yùn)算,在實(shí)現(xiàn)功率快速分配的同時(shí),達(dá)到顯著降低算法復(fù)雜度的目的。瑞利信道下的仿真結(jié)果表明,采用該算法所獲得的系統(tǒng)容量和中
2018-03-09 15:22:441 機(jī)器學(xué)習(xí)(Machine Learning, ML)是一門多領(lǐng)域交叉學(xué)科,涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。專門研究計(jì)算機(jī)怎樣模擬或?qū)崿F(xiàn)人類的學(xué)習(xí)行為,以獲取新的知識(shí)或技能,重新組織已有的知識(shí)結(jié)構(gòu)使之不斷改善自身的性能。
2018-05-18 23:44:002755 一個(gè)算法有缺陷,或不適合于某個(gè)問題,執(zhí)行這個(gè)算法將不會(huì)解決這個(gè)問題。不同的算法可能用不同的時(shí)間、空間或效率來完成同樣的任務(wù)。一個(gè)算法的優(yōu)劣可以用空間復(fù)雜度與時(shí)間復(fù)雜度來衡量。
2018-09-29 08:00:003 機(jī)器學(xué)習(xí)是一門多領(lǐng)域交叉學(xué)科,涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。專門研究計(jì)算機(jī)怎樣模擬或?qū)崿F(xiàn)人類的學(xué)習(xí)行為,以獲取新的知識(shí)或技能,重新組織已有的知識(shí)結(jié)構(gòu)使之不斷改善自身的性能。
2018-11-20 17:19:5920556 ,直到模型在訓(xùn)練數(shù)據(jù)上獲得期望的精確度。監(jiān)督式學(xué)習(xí)的例子有:回歸、決策樹、隨機(jī)森林、K – 近鄰算法、邏輯回歸等。
2019-04-13 10:38:132499 最常見的機(jī)器學(xué)習(xí)算法是學(xué)習(xí)映射Y = f(X)來預(yù)測(cè)新X的Y,這叫做預(yù)測(cè)建模或預(yù)測(cè)分析。
2019-05-05 09:21:003474 
機(jī)器學(xué)習(xí)的變革性作用,以及為何它現(xiàn)在如此重要,是因?yàn)槲覀儊淼搅藬?shù)據(jù)、運(yùn)算能力以及算法復(fù)雜度的轉(zhuǎn)折點(diǎn)。
2019-07-03 16:27:591127 機(jī)器學(xué)習(xí)(Machine Learning, ML)是一門多領(lǐng)域交叉學(xué)科,涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。
2019-07-08 10:05:05721 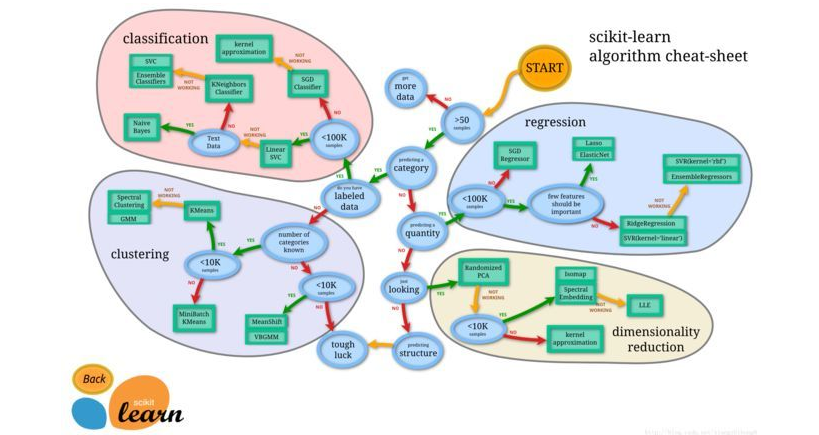
將霍夫曼編碼原理引入數(shù)字水印領(lǐng)域,提出一種基于圖像特征的數(shù)字水印新算法,以降低數(shù)字水印算法復(fù)雜度。算法在嵌入水印時(shí),首先將數(shù)字圖像進(jìn)行三級(jí)小波分解,并提取三級(jí)逼近分量的邊緣特征。然后用霍夫曼編碼計(jì)算
2019-11-26 11:48:254 算法公式挺費(fèi)神,機(jī)器學(xué)習(xí)太傷人。任何一個(gè)剛?cè)腴T機(jī)器學(xué)習(xí)的人都會(huì)被復(fù)雜的公式和晦澀難懂的術(shù)語嚇到。但其實(shí),如果有通俗易懂的圖解,理解機(jī)器學(xué)習(xí)的原理就會(huì)非常容易。本文整理了一篇博客文章的內(nèi)容,讀者可根據(jù)這些圖理解看似高深的機(jī)器學(xué)習(xí)算法。
2020-05-21 08:00:001 機(jī)器學(xué)習(xí)是一門多領(lǐng)域交叉學(xué)科,廊括眾多:涉及到概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。專門研究計(jì)算機(jī)怎樣模擬或?qū)崿F(xiàn)人類的學(xué)習(xí)行為,以獲取新的知識(shí)或技能,重新組織已有的知識(shí)結(jié)構(gòu)使之不斷改善自身的性能。
2020-07-28 09:04:192915 機(jī)器學(xué)習(xí)(machinelearning)是一門多領(lǐng)域交叉學(xué)科,涉及了概率論、統(tǒng)計(jì)學(xué)、算法復(fù)雜度等多門學(xué)科。
2020-08-24 17:33:127491 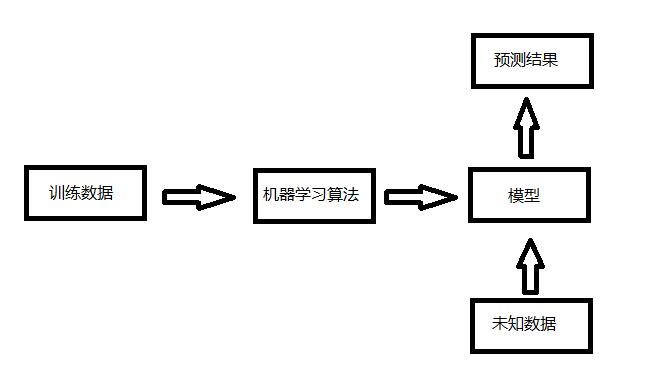
什么是機(jī)器學(xué)習(xí)?機(jī)器學(xué)習(xí)是英文名稱MachineLearning(簡(jiǎn)稱ML)的直譯。機(jī)器學(xué)習(xí)涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。
2020-11-12 10:19:121203 采用隨機(jī)插入策略的垃圾代碼控制流混淆算法,存在混淆強(qiáng)度和額外開銷的不確定性。針對(duì)該問題,提出一種基于嵌套復(fù)雜度的控制流混淆算法OB_NC,對(duì)混淆所引入的開銷進(jìn)行定量計(jì)算,采用嵌套復(fù)雜度對(duì)控制流復(fù)雜度
2020-11-20 17:14:3413 什么是機(jī)器學(xué)習(xí)?機(jī)器學(xué)習(xí)是英文名稱MachineLearning(簡(jiǎn)稱ML)的直譯。機(jī)器學(xué)習(xí)涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。
2021-01-21 09:29:063315 傳統(tǒng)基于壓縮感知的信道估計(jì)方法存在計(jì)算復(fù)雜度較高、較難應(yīng)用于實(shí)際的問題。為此,將廣義的正交匹配追蹤(GOMP)算法應(yīng)用到信道估計(jì)中,通過一次迭代選取多個(gè)原子,降低算法的計(jì)算復(fù)雜度,考慮無線信道的能量
2021-03-01 15:25:076 機(jī)器學(xué)習(xí)是一門多領(lǐng)域交叉學(xué)科,涉及概率論、統(tǒng)計(jì)學(xué)、逼近論、凸分析、算法復(fù)雜度理論等多門學(xué)科。專門研究計(jì)算機(jī)怎樣模擬或?qū)崿F(xiàn)人類的學(xué)習(xí)行為,以獲取新的知識(shí)或技能,重新組織已有的知識(shí)結(jié)構(gòu)使之不斷改善自身
2022-01-30 17:14:00956 伴隨著模型復(fù)雜度的增加,機(jī)器學(xué)習(xí)算法的可解釋性越差,至今,機(jī)器學(xué)習(xí)的可解釋性依舊是個(gè)難題.通過算法訓(xùn)練出的模型被看作成黑盒子,嚴(yán)重阻礙了機(jī)器學(xué)習(xí)在某些特定領(lǐng)域的使用,譬如醫(yī)學(xué)、金融等領(lǐng)域.目前針對(duì)機(jī)器學(xué)習(xí)的可解釋性綜
2022-01-25 08:35:36790 
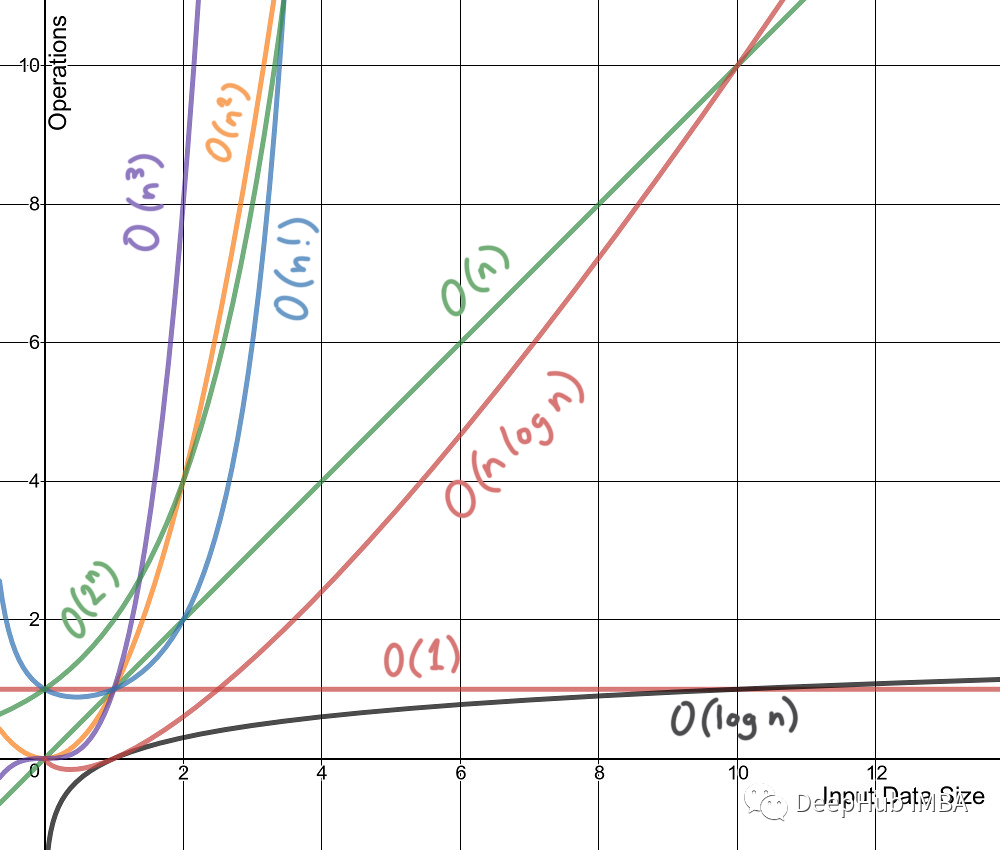
相信每一位錄友都接觸過時(shí)間復(fù)雜度,但又對(duì)時(shí)間復(fù)雜度的認(rèn)識(shí)處于一種朦朧的狀態(tài),所以是時(shí)候?qū)r(shí)間復(fù)雜度來一個(gè)深度的剖析了。
2022-03-18 10:18:511532 那么我通過一道簡(jiǎn)單的面試題,模擬面試的場(chǎng)景,來帶大家逐步分析遞歸算法的時(shí)間復(fù)雜度,最后找出最優(yōu)解,來看看同樣是遞歸,怎么就寫成了O(n)的代碼。
2022-07-13 11:30:491928 相信很多同學(xué)對(duì)遞歸算法的時(shí)間復(fù)雜度都很模糊,那么這篇Carl來給大家通透的講一講。
2022-07-13 11:33:021309 算法之空間復(fù)雜度:衡量一個(gè)算法運(yùn)行需要開辟的額外空間
2022-08-31 10:29:401262 現(xiàn)在,機(jī)器學(xué)習(xí)有很多算法。如此多的算法,可能對(duì)于初學(xué)者來說,是相當(dāng)不堪重負(fù)的。今天,我們將簡(jiǎn)要介紹 10 種最流行的機(jī)器學(xué)習(xí)算法,這樣你就可以適應(yīng)這個(gè)激動(dòng)人心的機(jī)器學(xué)習(xí)世界了!
2022-10-24 10:08:421518 我以前的文章主要都是講解算法的原理和解題的思維,對(duì)時(shí)間復(fù)雜度和空間復(fù)雜度的分析經(jīng)常一筆帶過,主要是基于以下兩個(gè)原因:
2023-04-12 14:37:29323 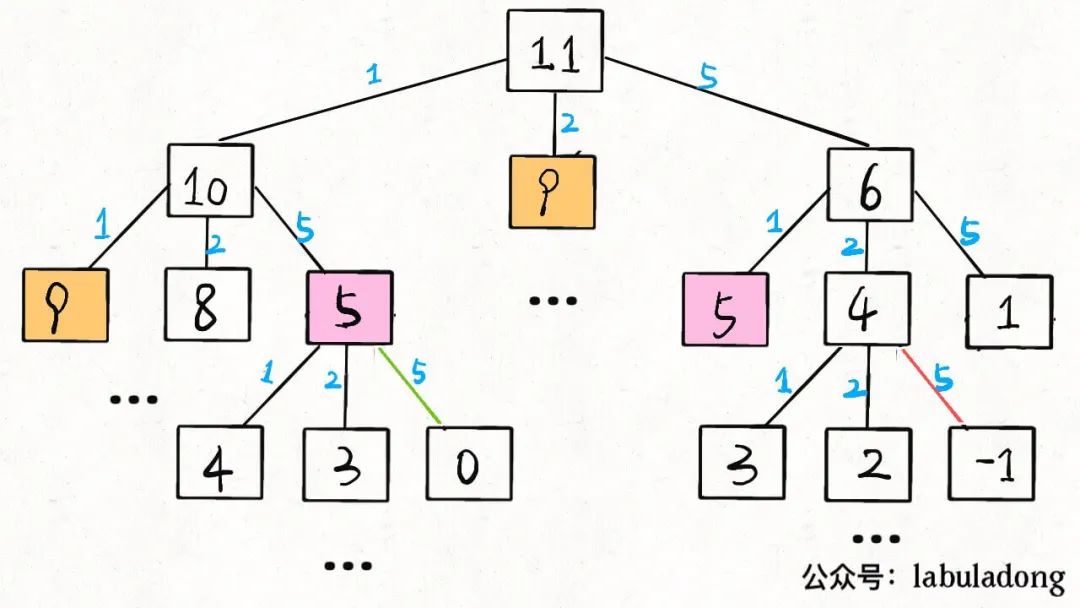
類似的,想想之前說的數(shù)據(jù)結(jié)構(gòu)擴(kuò)容的場(chǎng)景,也許`N`次操作中的某一次操作恰好觸發(fā)了擴(kuò)容,導(dǎo)致時(shí)間復(fù)雜度提高,但總的時(shí)間復(fù)雜度依然保持在`O(N)`,所以均攤到每一次操作上,其平均時(shí)間復(fù)雜度依然是`O(1)`。
2023-04-12 14:38:04328 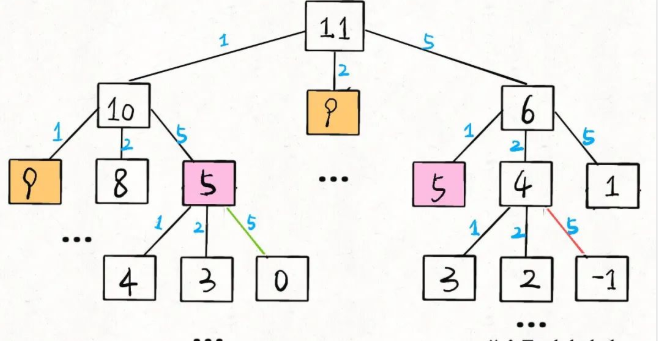
今天給大家分享一下常見機(jī)械傳動(dòng)效率的一般經(jīng)驗(yàn)值。
2023-04-18 12:48:243720 本文會(huì)篇幅較長(zhǎng),會(huì)涵蓋如下幾點(diǎn):
1、Big O 表示法的幾個(gè)基本特點(diǎn)。
2、非遞歸算法中的時(shí)間復(fù)雜度分析。
3、數(shù)據(jù)結(jié)構(gòu) API 的效率衡量方法(攤還分析)。
4、遞歸算法的時(shí)間/空間復(fù)雜度的分析方法,這部分是重點(diǎn),我會(huì)用動(dòng)態(tài)規(guī)劃和回溯算法舉例。
2023-04-19 10:34:55495 Big O 表示法的幾個(gè)基本特點(diǎn)。
2、非遞歸算法中的時(shí)間復(fù)雜度分析。
3、數(shù)據(jù)結(jié)構(gòu) API 的效率衡量方法(攤還分析)。
4、遞歸算法的時(shí)間/空間復(fù)雜度的分析方法,這部分是重點(diǎn),我會(huì)用動(dòng)態(tài)規(guī)劃和回溯算法舉例。
2023-04-19 10:35:38407 為了更好地理解各種技術(shù),根據(jù)其目標(biāo)和復(fù)雜度級(jí)別進(jìn)行分類是有幫助的。通過將這些算法組織成不同類別和復(fù)雜度,可以簡(jiǎn)化概念,使其更容易理解。這種方法可以極大增強(qiáng)人們對(duì)機(jī)器學(xué)習(xí)的理解,并幫助確定用于特定任務(wù)或目標(biāo)的最合適的技術(shù)。
2023-05-06 11:02:29463 
本文將通過動(dòng)態(tài)演示+代碼的形式系統(tǒng)地總結(jié)十大經(jīng)典排序算法。 排序算法 算法分類 —— 十種常見排序算法可以分為兩大類: 比較類排序:通過比較來決定元素間的相對(duì)次序,由于其時(shí)間復(fù)雜度不能突破
2023-06-22 14:49:00591 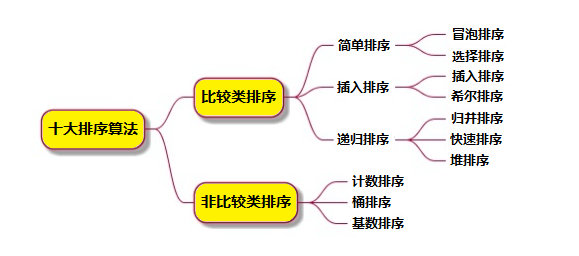
機(jī)器學(xué)習(xí)算法的5種基本算子 機(jī)器學(xué)習(xí)是一種重要的人工智能技術(shù),它是為了讓計(jì)算機(jī)能夠通過數(shù)據(jù)自主的學(xué)習(xí)和提升能力而發(fā)明的。機(jī)器學(xué)習(xí)算法是機(jī)器學(xué)習(xí)的核心,它是指讓計(jì)算機(jī)從數(shù)據(jù)中進(jìn)行自主學(xué)習(xí)并且可以實(shí)現(xiàn)
2023-08-17 16:11:461245 機(jī)器學(xué)習(xí)算法匯總 機(jī)器學(xué)習(xí)算法分類 機(jī)器學(xué)習(xí)算法模型 機(jī)器學(xué)習(xí)是人工智能的分支之一,它通過分析和識(shí)別數(shù)據(jù)模式,學(xué)習(xí)從中提取規(guī)律,并用于未來的決策和預(yù)測(cè)。在機(jī)器學(xué)習(xí)中,算法是最基本的組成部分之一。算法
2023-08-17 16:11:48632 機(jī)器學(xué)習(xí)算法總結(jié) 機(jī)器學(xué)習(xí)算法是什么?機(jī)器學(xué)習(xí)算法優(yōu)缺點(diǎn)? 機(jī)器學(xué)習(xí)算法總結(jié) 機(jī)器學(xué)習(xí)算法是一種能夠從數(shù)據(jù)中自動(dòng)學(xué)習(xí)的算法。它能夠從訓(xùn)練數(shù)據(jù)中學(xué)習(xí)特征,進(jìn)而對(duì)未知數(shù)據(jù)進(jìn)行分類、回歸、聚類等任務(wù)。通過
2023-08-17 16:11:50939 ,討論一些主要的機(jī)器學(xué)習(xí)算法,以及比較它們之間的優(yōu)缺點(diǎn),以便于您選擇適合的算法。 一、機(jī)器學(xué)習(xí)算法的基本概念 機(jī)器學(xué)習(xí)是一種人工智能的技術(shù),它允許計(jì)算機(jī)從歷史數(shù)據(jù)中學(xué)習(xí)模式,以便于更好地預(yù)測(cè)未來的數(shù)據(jù)。機(jī)器學(xué)習(xí)算法
2023-08-17 16:27:15569 (VSM)算法計(jì)算相似性。本文將從以下幾個(gè)方面介紹機(jī)器學(xué)習(xí)vsm算法。 1、向量空間模型 向量空間模型是一種常見的文本表示方法,根據(jù)文本的詞頻向量將文本映射到一個(gè)高維向量空間中。這種方法在信息檢索中被廣泛使用,可以使用余弦相
2023-08-17 16:29:35529 機(jī)器學(xué)習(xí)有哪些算法?機(jī)器學(xué)習(xí)分類算法有哪些?機(jī)器學(xué)習(xí)預(yù)判有哪些算法? 機(jī)器學(xué)習(xí)是一種人工智能技術(shù),通過對(duì)數(shù)據(jù)的分析和學(xué)習(xí),為計(jì)算機(jī)提供智能決策。機(jī)器學(xué)習(xí)算法是實(shí)現(xiàn)機(jī)器學(xué)習(xí)的基礎(chǔ)。常見的機(jī)器學(xué)習(xí)算法
2023-08-17 16:30:111245 隨著計(jì)算能力和大數(shù)據(jù)的崛起,機(jī)器學(xué)習(xí)算法正迎來快速發(fā)展的時(shí)期。在研究層面上,機(jī)器學(xué)習(xí)和深度學(xué)習(xí)是當(dāng)前最主要的熱點(diǎn)。在計(jì)算能力的推動(dòng)下,機(jī)器學(xué)習(xí)算法取得了許多重大突破,如AlphaGo戰(zhàn)勝人類棋手
2023-08-22 17:49:271659 來完成,那么該算法的用處就不會(huì)太大。同樣如果該算法需要若干個(gè)GB的內(nèi)存,那么在大部分機(jī)器上都無法使用。 一個(gè)算法的評(píng)價(jià)主要從時(shí)間復(fù)雜度和空間復(fù)雜度來考慮。 而時(shí)間復(fù)雜度是一個(gè)函數(shù),定性描述該算法的運(yùn)行時(shí)間,通常用大O符號(hào)表示。
2023-10-13 11:19:32908 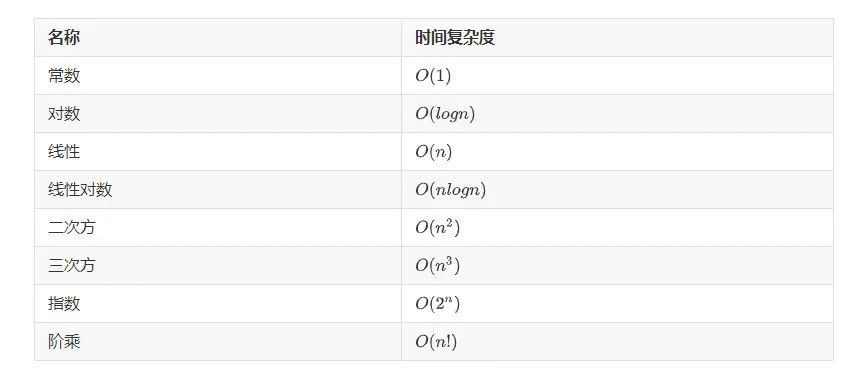
首先來詳細(xì)說明為什么Transformer的計(jì)算復(fù)雜度是 。將Transformer中標(biāo)準(zhǔn)的Attention稱為Softmax Attention。令 為長(zhǎng)度為 的序列, 其維度為 , 。 可看作Softmax Attention的輸入。
2023-12-04 15:31:22343 
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論