目標(biāo)。模板就是我們已知的在圖中要找的目標(biāo),且該目標(biāo)同模板有相同的尺寸、方向和圖像,通過一定的算法可以在圖中找到目標(biāo),確定其坐標(biāo)位置。 二:模板匹配的原理 用通俗的語言來解釋模板的匹配原理: 在要檢測的圖像上,從左到右,從上到
2022-05-05 09:25:07 29747
29747 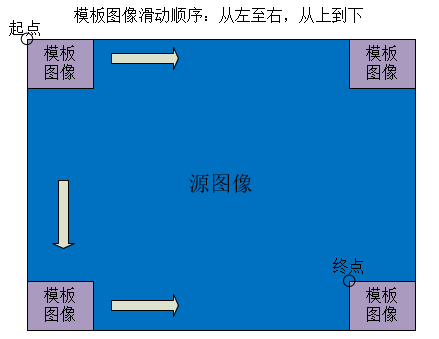
要談3D視覺應(yīng)用方案,就必須先弄清楚光學(xué)測量分類以及其原理。光學(xué)測量分為主動測距法和被動測距法。 主動測距方法的基本思想是利用特定的、人為控制光源和聲源對物體目標(biāo)進行照射,根據(jù)物體表面的反射
2020-12-01 15:08:04
的結(jié)果只是必要條件,只有當(dāng)是凸函數(shù)的情況下,才能保證是充分必要條件。KKT條件是拉格朗日乘子法的泛化。之前學(xué)習(xí)的時候,只知道直接應(yīng)用兩個方法,但是卻不知道為什么拉格朗日乘子法(Lagrange
2017-12-13 20:25:12
經(jīng)典機器學(xué)習(xí)算法介紹章節(jié)目標(biāo):機器學(xué)習(xí)是人工智能的重要技術(shù)之一,詳細(xì)了解機器學(xué)習(xí)的原理、機制和方法,為學(xué)習(xí)深度學(xué)習(xí)與遷移學(xué)習(xí)打下堅實的基礎(chǔ)。二、深度學(xué)習(xí)簡介與經(jīng)典網(wǎng)絡(luò)結(jié)構(gòu)介紹神經(jīng)網(wǎng)絡(luò)簡介神經(jīng)網(wǎng)絡(luò)組件簡介
2022-04-28 18:56:07
方法可以大大提高生產(chǎn)效率和生產(chǎn)的自動化程度。 三、項目方案 機器視覺是在沒有人工干預(yù)的情況下使用計算機來處理和分析圖像信息并作出結(jié)論。機器視覺的特點是自動化、客觀、非接觸和高精度,與一般意義上
2014-07-31 10:16:47
來抽取目標(biāo)的特征,如面積、數(shù)量、位置、長度,再根據(jù)預(yù)設(shè)的允許度和其他條件輸出結(jié)果,包括尺寸、角度、個數(shù)、合格 / 不合格、有 / 無等,實現(xiàn)自動識別功能。一個典型的機器視覺系統(tǒng)包括以下五大塊:照明、鏡頭
2016-01-17 07:56:01
和測量方形、圓形和橢圓形物體。提高機器視覺系統(tǒng)的精確度,可以幫助保持統(tǒng)一的包裝表面和顏色。盡管照相機、分析軟件和照明對于機器視覺系統(tǒng)都是十分重要的,可能最關(guān)鍵的元件還是工業(yè)相機鏡頭。系統(tǒng)若想完全發(fā)揮其功能
2012-10-22 15:57:59
:基于濾波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。也可以使用單目視覺和里程計融合的方法。以里程計讀數(shù)作為輔助信息,利用三角法計算特征點在當(dāng)前機器人坐標(biāo)系中的坐標(biāo)位置,這里的三維坐標(biāo)計算需要
2019-06-08 08:30:00
目標(biāo)識別 YOLO 學(xué)習(xí)筆記(一)
2020-05-12 15:05:34
解析深度學(xué)習(xí):卷積神經(jīng)網(wǎng)絡(luò)原理與視覺實踐
2020-06-14 22:21:12
本帖最后由 執(zhí)行司 于 2016-12-10 22:10 編輯
分享FFT頻譜分析法測相位
2016-11-28 09:18:11
本帖最后由 lilin0734 于 2016-4-16 15:37 編輯
NI機器視覺多模板匹配范例 給正在學(xué)習(xí)機器視覺的朋友們參考,可以同時匹配幾十個模板,是原創(chuàng)哦!呵呵 增加了一個2012版本的,方便低版本的打開。
2015-08-04 11:26:19
各位好!我是一名學(xué)生,先階段在準(zhǔn)備競賽,需要RCS目標(biāo)識別技術(shù),實現(xiàn)海上油污檢測。請問有沒有地方采購現(xiàn)成產(chǎn)品,或是自己制作是如何制作,謝謝!或是有其他什么方法可以實現(xiàn)海上油污檢測?
2015-01-27 15:50:02
匹配的功能,今天就給大家介紹下,labview視覺自帶的多模板匹配功能。多模板匹配僅支持幾何匹配,不支持灰度匹配。其多模板學(xué)習(xí)函數(shù)如下 注意點如下:Template images 是需要通過幾何模板
2019-09-24 16:59:51
`談到labview的定位,有很多人吐槽其沒有多模板匹配的功能,今天就給大家介紹下,labview視覺自帶的多模板匹配功能。多模板匹配僅支持幾何匹配,不支持灰度匹配。其多模板學(xué)習(xí)函數(shù)如下編程實現(xiàn)如下
2020-07-23 20:46:57
申請理由:一直在研究學(xué)習(xí)Linux,基于Linux在樹莓派上做過監(jiān)控,人臉識別,到目前做的大部分項目都是和機器視覺相關(guān),同時也學(xué)習(xí)了安卓,在實習(xí)培訓(xùn)期間與團隊成員合作完成了一個航空訂票的APP,看到
2015-08-10 14:13:25
、情感分析和情感分析。計算機視覺是另一個相關(guān)的學(xué)科。計算機視覺旨在復(fù)制人類的視覺,它涉及到場景識別、物體識別、物體分類、特征提取、手勢識別和手勢檢測的圖像處理。計算機視覺從人工智能和機器學(xué)習(xí)中吸取了許多
2022-03-22 11:19:16
改用模板匹配方法,可是對于數(shù)字模板的建立有些模糊,不知道如何讓建立,還請高手指點,如果可以的話您可以給我留言,希望加強交流,謝謝!我的郵箱是zl5196@sian.com,我的qq是286198431
2009-07-23 10:49:43
常用分析電路的方法有以下幾種:1、直流等效電路分析法在分析電路原理時,要搞清楚電路中的直流通路和交流通路。直流通路是指在沒有輸入信號時,各半導(dǎo)體三極管、集成電路的靜態(tài)偏置,也就是它們的靜態(tài)工作點
2016-07-19 10:32:32
常用分析電路的方法有以下幾種: 1、直流等效電路分析法 在分析電路原理時,要搞清楚電路中的直流通路和交流通路。直流通路是指在沒有輸入信號時,各半導(dǎo)體三極管、集成電路的靜態(tài)偏置,也就是它們的靜態(tài)
2016-06-01 21:24:32
實際地面距離進行標(biāo)定,便可獲知機器人所在位置。4.2 模板匹配算法 模板匹配技術(shù)是圖像目標(biāo)識別技術(shù)中一個重要的研究方向,具有算法簡單、計算量小以及識別率高等特點,目前在目標(biāo)識別領(lǐng)域得到廣泛應(yīng)用。它是用
2019-07-04 08:30:00
“狗”。深度學(xué)習(xí)主要應(yīng)用在數(shù)據(jù)分析上,其核心技術(shù)包括:神經(jīng)網(wǎng)絡(luò)搭建、神經(jīng)網(wǎng)絡(luò)訓(xùn)練及調(diào)用。CNN神經(jīng)網(wǎng)絡(luò)訓(xùn)練 機器視覺中的圖像預(yù)處理屬于傳統(tǒng)技術(shù),包括形態(tài)變換、邊緣檢測、BLOB分析等。圖像在人眼和機器下
2018-05-31 09:36:03
了,需要可以去下載。
德國MVTec公司開發(fā)地HALCON機器視覺開發(fā)軟件,提供了許多地功能,在這里我主要學(xué)習(xí)和研究了其中地形狀匹配地算法和流程。HDevelop開發(fā)環(huán)境中提供地匹配地方法主要有三種
2023-09-19 06:13:48
閾值的方法[4]、差分閾值法[5]、模板匹配法[6]、小波變換法[7,8]、神經(jīng)網(wǎng)絡(luò)法[8]等。這些方法各有所長,但還沒有一種堪稱完美。在數(shù)據(jù)分析過程中,這些方法都要對時域內(nèi)包括噪聲在內(nèi)的所有信號樣本點進行檢測、判別。
2012-11-30 16:52:53
求大神指導(dǎo)利用IEC推薦的閃變分析法,調(diào)制波解析式為u(t)=Um(1+mcoswFt)coswNt
2019-05-15 04:42:36
求大神幫忙發(fā)一個軸承故障聲學(xué)檢測小波分析法的matlab代碼
2015-07-06 13:20:51
流形學(xué)習(xí)是一種機器學(xué)習(xí)理論,旨在發(fā)現(xiàn)高維數(shù)據(jù)分布的內(nèi)在規(guī) 律,并 從中恢復(fù)低維流形結(jié)構(gòu) ,實現(xiàn)維數(shù)約簡 。本文將流形學(xué)習(xí)方法應(yīng)用于毫米波探測器目標(biāo)識 別 ,并 對現(xiàn)有流形學(xué)習(xí)算法進行了改進和推廣。
2021-12-20 15:43:44
灰色層次分析法進行了電磁環(huán)境效應(yīng)的評估計算,仿真結(jié)果驗證了該方法的有效性,同時也表明了應(yīng)用綜合集成方法解決電磁領(lǐng)域問題的可行性。【關(guān)鍵詞】:電磁環(huán)境效應(yīng);;層次分析法;;灰色理論;;評估【DOI
2010-05-04 08:06:05
橋LLC開關(guān)電源。直播亮點:1、如何利用基波分析法分析LLC諧振電路2、LLC諧振腔等效電路詳細(xì)分析3、諧振腔增益公式的解析現(xiàn)在凡報名本次直播課程,掃下方二維碼進群,在朋友圈轉(zhuǎn)發(fā)本次直播的海報,保留四
2019-01-04 11:46:15
層次分析法.pdf
2009-09-15 12:54:16
1、層次分析法AHP2、單片機學(xué)習(xí)層次分析法AHP將半定性,半定量的問題轉(zhuǎn)化為定量計算的一種行之有效的方法。成對比較矩陣和正互反矩陣設(shè)要比較n個因素C1,C2,……Cn對目標(biāo)O的影響,從而確定他們在
2021-07-19 06:19:28
數(shù)學(xué)建模算法:層次分析法之如何選擇旅游目的地
2019-06-03 17:31:04
幀同步通常采用的方法有逐位調(diào)整法和置位調(diào)整法,對比分析哪個好?采用置位調(diào)整法設(shè)計幀同步系統(tǒng)
2021-04-14 06:34:56
x1000000000。二:電容電子元器件識別的電容識別方法與電阻的識別方法基本相同,分直標(biāo)法、色標(biāo)法和數(shù)標(biāo)法3種。電容的基本單位用法拉(F)表示,其它單位還有:毫法(mF)、微法(uF)、納法(nF)、皮法(pF
2018-07-16 15:15:33
在數(shù)字電視、數(shù)字傳輸、數(shù)據(jù)通信中,其信號是采用多種調(diào)制方式的數(shù)字信號,這時的數(shù)字信號電平已不能用一般傳統(tǒng)的方法來定度和測量,用頻譜分析法測量數(shù)字信號電平雖然好,但具體該怎么做呢?
2019-08-08 07:44:21
相關(guān)分析法回歸分析法聚類分析法判別分析法主成分分析法因子分析法對應(yīng)分析法時間序列對比分析法分組分析法交叉分析法結(jié)構(gòu)分析法漏斗圖分析法綜合評價分析法因素分析法矩陣關(guān)聯(lián)分析基本分析方法高級分析方法二、數(shù)據(jù)分析
2021-06-23 12:16:28
相關(guān)分析法回歸分析法聚類分析法判別分析法主成分分析法因子分析法對應(yīng)分析法時間序列對比分析法分組分析法交叉分析法結(jié)構(gòu)分析法漏斗圖分析法綜合評價分析法因素分析法矩陣關(guān)聯(lián)分析基本分析方法高級分析方法二、數(shù)據(jù)分析
2021-06-30 11:42:09
攝動法及其在電力系統(tǒng)中的應(yīng)用首先介紹攝動法的基本概念,然后闡述三種主要的奇異攝動法,最后介紹其中的漸近展開匹配法、KB平均法及戴世強教(本文共7頁)閱讀全文>>隨著我國電力建設(shè)發(fā)展迅速
2021-08-31 06:12:13
1、智能車目標(biāo)識別系統(tǒng)的實現(xiàn) 首先,簡單介紹一下上面提到的各個話題的范圍 (Domain),人工智能 (Artifitial Intelligence)是最大的話題,如果用一張圖來說明的話
2022-09-06 14:54:26
最好的學(xué)習(xí)辦法打基礎(chǔ)、模仿、試錯、費曼學(xué)習(xí)法短時燒腦
2020-07-15 10:33:48
測試樣品是否包含人臉。 ③樣品學(xué)習(xí)法 這種方法即采用模式識別中人工神經(jīng)網(wǎng)絡(luò)的方法,即通過對面像樣品集和非面像樣品集的學(xué)習(xí)產(chǎn)生分類器。 ④膚色模型法 這種方法是依據(jù)面貌膚色在色彩空間中分布相對
2016-04-07 17:23:37
`熱處理后金屬材料組織分析方法-金相組織分析法-金相顯微鏡分析方法金相分析是金屬材料試驗研究的重要手段之一,采用定量金相學(xué)原理,由二維金相試樣磨面或薄膜的金相顯微組織的測量和計算來確定合金組織
2011-05-05 13:01:19
用微變等效電路分析法分析放大電路的關(guān)鍵在于正確地畫出放大電路的微變等效電路。具體方法是:首先畫出放大電路交流通路,然后用晶體管的簡化h參數(shù)等效電路代替晶體管,并標(biāo)明電壓、電流的參考方向。應(yīng)用微變等效電路分析法分析放...
2021-04-20 07:01:01
如圖,這個是節(jié)點分析法需要求的電路,求出Vx(t)的表達式。
2019-01-10 10:14:57
對電路進行分析的方法很多,如疊加定理、支路分析法、網(wǎng)孔分析法、結(jié)點分析法、戴維南和諾頓定理等。根據(jù)具體電路及相關(guān)條件靈活運用這些方法,對基本電路的分析有重要的意義。現(xiàn)就具體電路采用不同方法進行如下比較。
2021-03-16 13:52:31
電阻識別方法
2012-08-02 21:59:38
如圖,我用了電流分析法(因為我真的不知道還能用什么方法去做)得到了以下兩個等式然后簡化為:問題是我找不到線性組合來消掉i1或i2來解這個系統(tǒng)。是這個方法用錯了嗎,是不是還有簡單的解答方法呢。我知道穩(wěn)態(tài)解就把所有都變成阻抗,但是我想求出暫態(tài)解。
2018-09-21 11:07:36
,數(shù)碼管顯示相應(yīng)的鍵值,松開按鍵后,數(shù)碼管熄滅。建議采用行掃描法識別鍵盤,且鍵盤要求有去除抖動功能 。行掃描法行掃描法又稱為逐行(或列)掃描查詢法,是一種最常用的按鍵識別方法。過程如下:1.判斷鍵盤中有無按鍵按下。2.判斷閉合鍵所在的位置...
2021-12-01 06:57:07
怎樣從傳統(tǒng)機器學(xué)習(xí)方法過渡到深度學(xué)習(xí)?
2021-10-14 06:51:23
貼片電阻的識別方法貼片電阻的識別方法 貼片電阻元件具有體積小,重量輕,安裝密度高,抗震性強,抗干擾能力強,高頻特性好等優(yōu)點,廣泛應(yīng)用于各類電子產(chǎn)品中,貼片元件按其形狀分為矩形,圓柱型,異形三類.按
2012-08-02 22:10:41
,結(jié)合系統(tǒng)架構(gòu),確定輻射源。之后,通過對輻射源數(shù)字電路進行設(shè)計改進,加入芯片去耦電容和輸出信號線的濾波電容,優(yōu)化PCB設(shè)計,最終使該產(chǎn)品的空間輻射通過驗證標(biāo)準(zhǔn),并由此提出了空間輻射超標(biāo)頻譜分析法的步驟。
2015-08-05 15:58:43
手寫數(shù)字識別的模板匹配法
2008-01-02 19:43:42 72
72 針對工業(yè)自動裝配產(chǎn)品過程中異形工件出現(xiàn)旋轉(zhuǎn)后的定位問題,提出一種新的異形目標(biāo)識別方法,設(shè)計基于目標(biāo)輪廓的同心等勢線異形模板,并結(jié)合圓投影方法,能快速有效地實現(xiàn)
2009-04-14 08:34:5221 根據(jù)Hartman傳感器探測人眼波像差時的光斑特點, 提出了模板匹配法選取光斑窗口的質(zhì)心探測方法。本方法與P rieto 的質(zhì)心探測方法相比, 提高了質(zhì)心探測精度。對光斑陣列的仿真計算
2009-07-14 12:10:2011 本文提出了一種基于數(shù)據(jù)流修正的自適應(yīng)模板匹配定位方法。該方法首先在圖像預(yù)處理的基礎(chǔ)上,進行模板匹配,從而定位待識別目標(biāo);然后采用數(shù)據(jù)流修正的自適應(yīng)方法,根據(jù)
2009-08-17 08:05:1521 本文從C++靜態(tài)分析的角度出發(fā),介紹了模板和泛型構(gòu)件技術(shù)、一個C++靜態(tài)分析器實現(xiàn)中對模板和基本泛型構(gòu)件的分析和識別方法、以及一種基于UML 的泛型構(gòu)件的表示方法。[關(guān)
2009-08-17 11:16:5514 針對具有多個特征指標(biāo)的模糊多傳感器目標(biāo)識別問題,提出一種新的模糊多傳感器數(shù)據(jù)融合方法。該方法根據(jù)信息熵理論,引入不均衡度定義熵權(quán)矢量,通過求解數(shù)學(xué)規(guī)劃問題,
2009-10-04 14:12:0930 遙感圖像中不同港口的內(nèi)港區(qū)域呈現(xiàn)出不同的形狀,該文提出一種基于內(nèi)港區(qū)域的港口目標(biāo)識別方法。首先利用直方圖和形態(tài)學(xué)算子分割海域;再利用多邊形近似法提取海岸線上的
2009-11-17 15:22:319 該文提出了一種基于小波域非負(fù)矩陣分解特征提取的合成孔徑雷達圖像目標(biāo)識別方法。該方法對圖像二維離散小波分解后提取低頻子帶圖像,用非負(fù)矩陣分解對低頻子帶圖像提取特
2009-11-21 11:58:4821 本文設(shè)計了一種基于Blob分析的智能機器人視覺系統(tǒng)。在此基礎(chǔ)上提出識別規(guī)則物體的方法,利用不變矩、圖形的面積和周長比來識別物體的形狀,并采用Blob算法求取目標(biāo)物的中
2009-12-14 17:00:3215 本文在對字符進行各種預(yù)處理,包括傾斜校正,歸一化,分割的基礎(chǔ)上,依據(jù)字符的高度,寬度范圍,提出了一種基于多模板匹配的字符識別方法,并將該算法運用于仿宋_GB2312
2009-12-22 11:54:4828 針對當(dāng)前目標(biāo)識別系統(tǒng)中常用的信息融合方法識別率較低、運行速度慢、抗噪性差等問題,提出一種基于神經(jīng)網(wǎng)絡(luò)組和 DS 證據(jù)理論的信息融合方法。該方法兼顧神經(jīng)網(wǎng)絡(luò)和DS 推理
2010-01-18 12:22:525 利用合成孔徑雷達(Synthetic Aperture Radar, SAR)獲取的目標(biāo)像進行識別時,基于子空間的自動目標(biāo)識別(Automatic Target Recognition, ATR)方法通常是對樣本數(shù)據(jù)的值空間進行操作。當(dāng)識別相似目
2010-02-10 14:00:4719 形狀是人類視覺系統(tǒng)分析和識別目標(biāo)的基礎(chǔ)。針對現(xiàn)有方法的不足,該文提出了一種新的基于形狀統(tǒng)計模型的多類目標(biāo)自動識別方法。該模型定義形狀基元對作為特征描述子,從樣
2010-02-10 14:23:0922 本文從人類視覺系統(tǒng)識別彩色目標(biāo)的特點出發(fā),提出一種基于特征差異的彩色目標(biāo)快速識別方法,從而有效地提高了機器人視覺系統(tǒng)的實時性,并進行了多物體情況下特定目標(biāo)的識別
2010-03-03 15:02:2814 硬盤標(biāo)識識別方法
Seagate硬盤的編號比較簡單,其識別方法為:"ST+硬盤尺寸+容量+主標(biāo)識+副標(biāo)識+接口類型"。 為了另大家容易理解,簡單的
2008-09-04 12:56:416181 電容的識別方法
電容的識別方法與電阻的識別方法基本相同,分直標(biāo)法、色標(biāo)法和數(shù)標(biāo)法3種。
電容的基本單位用法拉(F)表示,其它單位還
2010-02-06 18:13:135705 通常的偵察手段對于軍事假目標(biāo)的識別能力有限,文中提出了一種新的軍事假目標(biāo)識別方法。在介紹偏振成像機理的基礎(chǔ)上,分析了偏振信息檢測和強度信息檢測在物理含義中的區(qū)別。
2011-08-29 15:11:0136 針對車牌漢字識別提出了一種基于二值圖形變動分析的模糊模板匹配的車牌漢字識別方案。介紹了該方法的具體實現(xiàn)算法和實驗流程及結(jié)果。
2011-12-23 15:33:5284 在介紹運動檢測以及光流的基本概念的基礎(chǔ)上引出基于光流方程的兩種常用的圖像分析方法--梯度法、塊匹配法;通過對光流法在紅外圖像序列的運動目標(biāo)檢測、活動輪廓模型以及醫(yī)學(xué)
2013-04-08 09:19:1046 提出了一種基于相關(guān)分析的飛機目標(biāo)識別方法。該方法利用飛機圖像低頻和高頻部分合成濾波器模板,能達到很高識別率與很低的等錯率。該研究旨在提高飛機識別的準(zhǔn)確率和降低出錯
2013-09-02 14:54:5521 針對目標(biāo)識別問題,采取了基于協(xié)同學(xué)的模式識別理論,引入了協(xié)同神經(jīng)網(wǎng)絡(luò)并對其穩(wěn)定性進行了分析,提出了基于協(xié)同神經(jīng)網(wǎng)絡(luò)對軍事目標(biāo)進行識別的方法,并通過仿真驗證了該方法
2013-09-18 10:29:5926 電子開發(fā)機器人相關(guān)教程資料——全自主移動足球機器人目標(biāo)識別
2016-09-06 16:42:430 基于無監(jiān)督特征學(xué)習(xí)的手勢識別方法_陶美平
2017-01-03 17:41:581 基于多核學(xué)習(xí)的靜態(tài)圖像人體行為識別方法_楊紅菊
2017-01-08 11:13:296 基于RHT的局部有遮擋圓形目標(biāo)識別方法_顧肇瑞
2017-03-17 08:00:000 針對被局部遮擋目標(biāo)的識別困難的問題,將目標(biāo)圖像的SIFT( Scale Invariant Feature Transform)特征矢量作為視覺單詞,應(yīng)用視覺詞匯算法,提出了基于SIFT特征視覺詞匯
2017-11-14 11:04:145 針對詞袋模型易受到無關(guān)的背景視覺噪音干擾的問題,提出了一種結(jié)合顯著性檢測與詞袋模型的目標(biāo)識別方法。首先,聯(lián)合基于圖論的視覺顯著性算法與一種全分辨率視覺顯著性算法,自適應(yīng)地從原始圖像中獲取感興趣區(qū)域
2017-11-17 15:24:142 針對遙感圖像視覺對比度差、分辨率低及目標(biāo)含有不同角度旋轉(zhuǎn)的情況,在稀疏表示分類識別的基礎(chǔ)上,提出一種基于擴展字典稀疏表示的遙感目標(biāo)識別方法。首先將訓(xùn)練樣本和待測樣本進行二進小波變換增強,提取增強圖像
2017-11-17 17:18:389 ,在輸入圖像質(zhì)量不佳的情況下,這一點往往難以做到。在統(tǒng)計模式識別方法中,特征提取方便,識別速度與識別對象無關(guān),但需要得到字符集的穩(wěn)定特征,且在字符筆畫較多時要求的特征量非常大。二種識別方法各有優(yōu)缺點。 人類的視覺
2017-11-30 11:19:530 針對傳統(tǒng)的顏色一深度(RGB-D)圖像物體識別的方法所存在的圖像特征學(xué)習(xí)不全面、特征編碼魯棒性不夠等問題,提出了基于核描述子局部約束線性編碼( KD-LLC)的RGB-D圖像物體識別方法。首先
2017-12-07 10:22:311 在現(xiàn)代防空作戰(zhàn)中,為獲得最佳作戰(zhàn)效果,必須實時獲取戰(zhàn)場態(tài)勢估計,目標(biāo)識別是戰(zhàn)場態(tài)勢估計的重要組成部分。目標(biāo)識別技術(shù)利用多傳感器資源,通過對各個傳感器及其觀測信息的合理支配與使用,將各傳感器
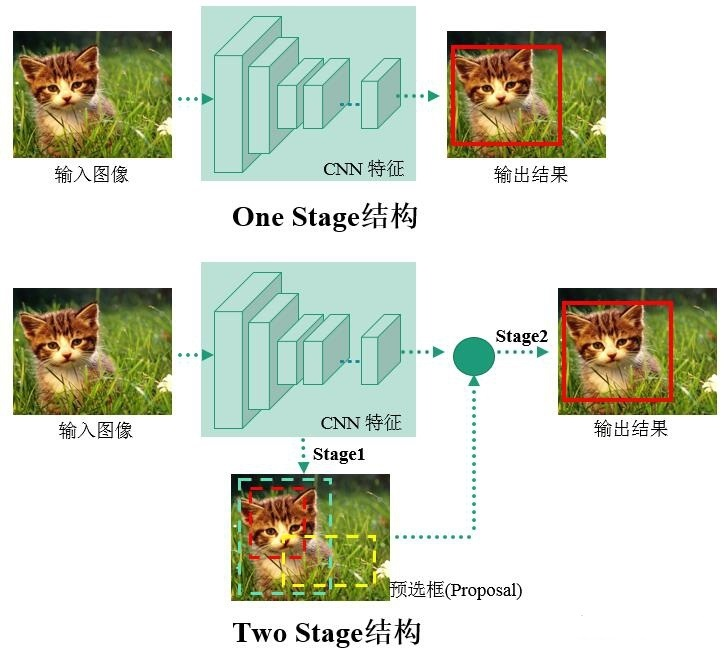
2017-12-14 16:34:160 計算機計算性能的提升使得深度學(xué)習(xí)成為了可能.作為計算機視覺領(lǐng)域的重要發(fā)展方向之一的目標(biāo)檢測也開始結(jié)合深度學(xué)習(xí)方法并廣泛應(yīng)用于各行各業(yè),受限于網(wǎng)絡(luò)的復(fù)雜度和檢測算法的設(shè)計。目標(biāo)檢測的速度和精度成為
2017-12-15 10:15:020 將目標(biāo)形狀的輪廓看成一個無序的點集,從中抽取形狀特征,用于快速而有效的目標(biāo)識別是形狀分析任務(wù)中的挑戰(zhàn)性問題.針對該問題,提出了一種基于復(fù)雜網(wǎng)絡(luò)模型的形狀描述和識別方法.該方法提出用一種自組織的網(wǎng)絡(luò)
2018-01-05 15:26:460 觀看iVeia的首席技術(shù)官Michael Fawcett,演示了采用Zynq Ultrascale + MPSoC的模塊上的Atlas 2Z8系統(tǒng)如何使用機器視覺和機器學(xué)習(xí)應(yīng)用程序執(zhí)行多目標(biāo)識別。
2018-11-26 06:22:002748 深度學(xué)習(xí)仍是視覺大數(shù)據(jù)領(lǐng)域的最好分析方法之一
2019-08-26 15:48:334664 圖像匹配 應(yīng)用: 目標(biāo)識別、目標(biāo)跟蹤、超分辨率影像重建、視覺導(dǎo)航、圖像拼接、三維重建、視覺定位、場景深度計算 方法: 基于深度學(xué)習(xí)的特征點匹配算法、實時匹配算法、3維點云匹配算法、共面線點不變量匹配
2020-12-26 11:08:576447 臉目標(biāo)識別技術(shù)已無法滿足日益增長的需求。對此,文中通過聚類分析方法對傳統(tǒng)SIFI( Scale invariant feature transform)算法進行優(yōu)化改進,利用聚類分析的原理將對象特征點進行歸類,使得聚類結(jié)果更加符合設(shè)定閾值,從而提高匹配效率
2021-05-18 14:48:4610 無線電調(diào)制類型識別廣泛應(yīng)用于軍民的各個領(lǐng)域,相比人工識別和頻譜分析法等傳統(tǒng)方法,基于深度學(xué)習(xí)的信號調(diào)制類型識別方法取得了較妤性能,但仍存在識別準(zhǔn)確率低的問題。文中提岀了一種基于長短時記憶網(wǎng)絡(luò)
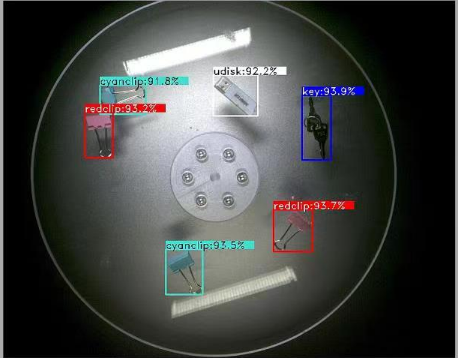
2021-06-17 10:32:5326 如今,深度學(xué)習(xí)算法的發(fā)展越來越迅速,并且在圖像處理以及目標(biāo)對象識別方面已經(jīng)得到了較為顯著的突破,無論是對檢測對象的類型判斷,亦或者對檢測對象所處方位的檢測,深度學(xué)習(xí)算法都取得了遠超過傳統(tǒng)機器學(xué)習(xí)算法
2022-08-02 12:07:061388 隨著機器學(xué)習(xí),深度學(xué)習(xí)的發(fā)展,很多肉眼很難去直接量化的特征,深度學(xué)習(xí)可以自動學(xué)習(xí)這些特征,這就是深度學(xué)習(xí)帶給我們的優(yōu)點和前所未有的吸引力。
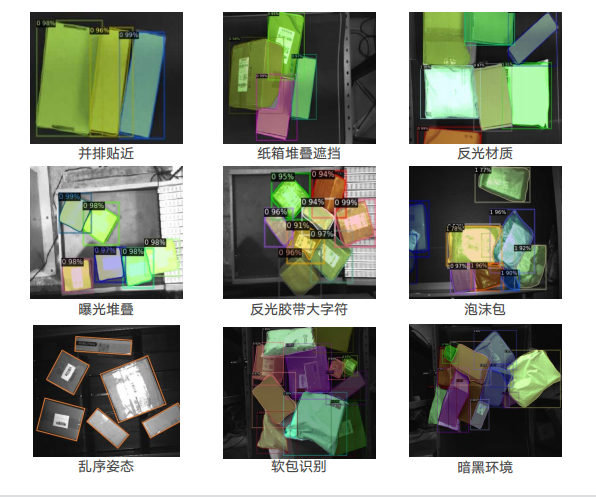
2022-11-30 15:43:37838 隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。
傳統(tǒng)方法做目標(biāo)識別大多都是靠人工實現(xiàn),從形狀、顏色、長度、寬度、長寬比來確定被識別的目標(biāo)是否符合標(biāo)準(zhǔn),最終
2023-02-07 12:00:07701 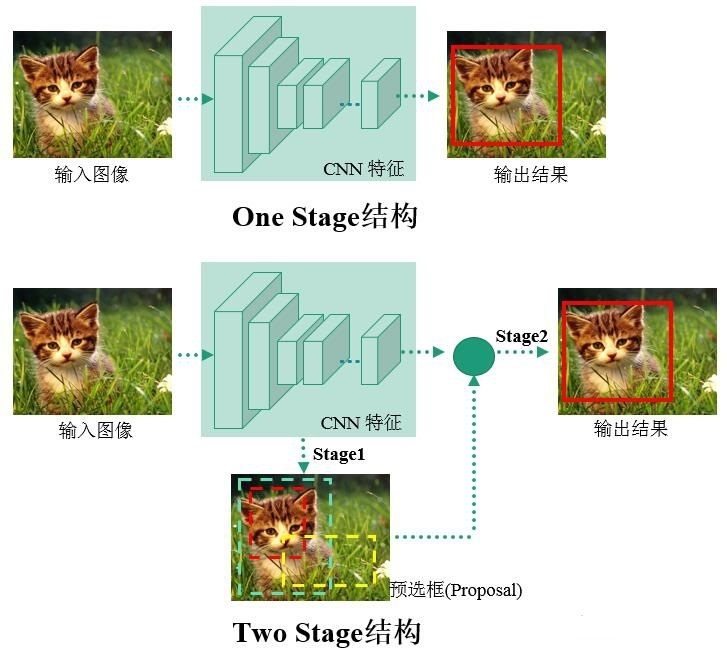
來源:機器視覺沙龍隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。傳統(tǒng)方法做目標(biāo)識別大多都是靠人工實現(xiàn),從形狀、顏色、長度、寬度、長寬比來確定被識別的目標(biāo)是否符合
2022-12-15 10:44:10619 
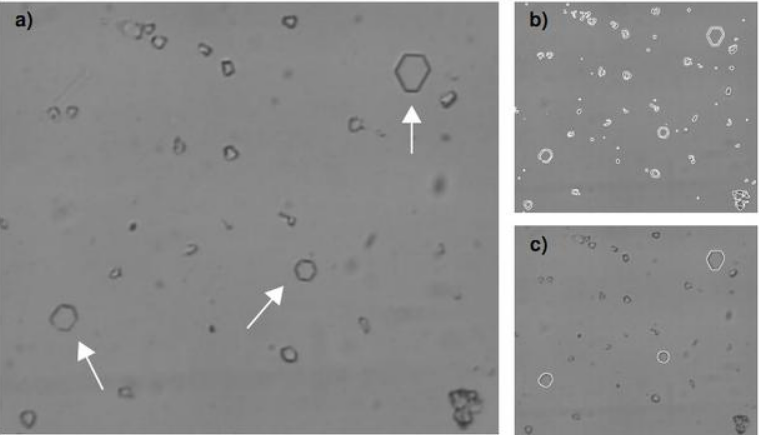
通過加強圖像分割,能夠提高機器視覺的圖像目標(biāo)識別的自動化水平,使得圖像目標(biāo)識別效果更加顯著。圖像分割的方法有很多種,不同方法分別適用于不同領(lǐng)域,這里重點介紹以下3種分割方法。
2024-01-15 12:17:54122 文章來源:MEMS引言從20世紀(jì)80年代開始,機器視覺技術(shù)的發(fā)展速度不斷加快,已經(jīng)走進了人們的日常生活與工作之中。機器視覺的圖像目標(biāo)識別系統(tǒng)的自動化程度較高,應(yīng)用范圍廣,尤其在危險場所的運用,采用
2024-02-23 08:26:49280 隨著機器視覺技術(shù)的快速發(fā)展,傳統(tǒng)很多需要人工來手動操作的工作,漸漸地被機器所替代。傳統(tǒng)方法做目標(biāo)識別大多都是靠人工實現(xiàn),從形狀、顏色、長度、寬度、長寬比來確定被識別的目標(biāo)是否符合標(biāo)準(zhǔn),最終定義出
2024-03-14 08:26:20225
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論