特征點法的VSLAM系統中,特征點并不是越多越好;相反, 少量 并且 質量高 的點會讓這個SLAM系統位姿精度更高,且消耗更少的存儲資源和計算資源。
2022-08-23 11:09:48 1200
1200 本文的優勢不僅包括討論A-SLAM的內部組成部分,還包括其應用領域、局限性和未來前景,以及對過去十年A-SLAM進行全面的統計調查。
2023-03-17 10:44:57504 上周的組會上,我給研一的萌新們講解什么是SLAM,為了能讓他們在沒有任何基礎的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會匯報總結一下。 這次匯報的題目我定為“視覺SLAM:一直在
2023-08-21 10:02:071574 
神經隱式表示已經被探索用于增強視覺SLAM掩碼算法,特別是在提供高保真的密集地圖方面。
2024-01-17 10:39:50442 
SLAM技術作為機器人自主移動的關鍵技術,讓很多人都誤解為:SLAM=機器人自主定位導航。 其實,SLAM≠機器人自主定位導航 ,不解決行動問題。 SLAM如其名一樣,主要解決的是機器人的地圖構建
2018-08-24 16:56:24
常有必要的 。 回環檢測失敗 如何提升機器人回環檢測能力? 那么,怎么才能讓機器人的回環檢測能力得到一個質的提升呢?首先要有一個算法上的優化。 1. 基于圖優化的SLAM算法 基于圖優化
2019-03-06 15:38:04
近年來,由于掃地機的出現使得SLAM技術名聲大噪,如今,已在機器人、無人機、AVG等領域相繼出現它的身影,今天就來跟大家聊一聊國內SLAM的發展現狀。 SLAM的多領域應用SLAM應用領域廣泛,按其
2018-12-06 10:25:32
無人機在飛行的過程中需要知道哪里有障礙物,該怎么規避,怎么重新規劃路線。顯然,這是SLAM技術的應用。但無人機飛行的范圍較大,所以對精度的要求不高,市面上其他的一些光流、超聲波傳感器可以
2020-12-01 14:26:37
研究生期間進行了基于2D激光雷達的SLAM的研究,當時主要做了二維激光雷達的數據處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機會,決定正式邁出第一步,徹底進入SLAM的坑!心中
2021-08-30 06:13:31
導讀:UPS是系統集成項目中常用到的設備,也是機房必備的設備。本文簡單介紹了UPS的種類、功能、原理,品質選擇與配置選擇方式,基礎維護等相關的內容。一文搞懂UPS本文主要內容:UPS種類、功能
2021-09-15 07:49:53
參考一文搞懂開關電源波紋的產生、測量及抑制開關電源紋波的產生上圖是開關電源中最簡單的拓撲結構-buck降壓型電源。隨著SWITCH的開關,電感L中的電流也是在輸出電流的有效值上下波動的。所以在輸出端
2021-12-30 08:31:11
指針是一個特殊的變量,它里面存儲的數值被解釋為內存里面的一個地址想要徹底搞懂它,就必須從計算機的底層進行解釋,這是你的內存條,內存在物理上是由一組DRAM芯片組成,程序在運行時。數據便被保存
2022-07-22 14:48:04
摘要故障診斷是保證水輪發電機組安全運行的重要環節。軸心軌跡辨識是HGU故障診斷的一種有效方法。提出了一種基于綜合幾何特征和概率神經網絡(CGC-PNN)的HGU軸軌識別方法。該方法從結構、區域和邊界
2021-09-15 08:18:35
嵌入式Linux開發系統開發之《一節課搞懂文件IO與標準IO》
2021-12-16 08:18:24
神經元 第3章 EBP網絡(反向傳播算法) 3.1 含隱層的前饋網絡的學習規則 3.2 Sigmoid激發函數下的BP算法 3.3 BP網絡的訓練與測試 3.4 BP算法的改進 3.5 多層
2012-03-20 11:32:43
將神經網絡移植到STM32最近在做的一個項目需要用到網絡進行擬合,并且將擬合得到的結果用作控制,就在想能不能直接在單片機上做神經網絡計算,這樣就可以實時計算,不依賴于上位機。所以要解決的主要是兩個
2022-01-11 06:20:53
《Fundamentals of Computer Graphics》翻譯(三):隱式2D直線
2019-09-03 12:19:29
您好,我現在正在使用PIC16F18313,在代碼中,我聲明了一個變量,它位于我放入的示例代碼中,問題是,我收到一個警告:隱式簽名到無符號轉換,我不知道是什么原因或者如何修復它。關于我的問題:希望你能得到一個很好的回答。謝謝。
2020-04-07 14:06:10
您好,我很少關注隱式簽名到無符號轉換警告。為什么所有的變量都被聲明為無符號,我仍然得到這個警告?上面例子中的值是否被視為無符號或有符號字符?在這種情況下,變量“C”的值是150還是其他?同樣,在下一
2018-11-06 14:43:52
預設一些特征來定位,比較典型的例子是Amazon的Kiva。 Amazon的Kiva 【 ■SLAM(同步定位與地圖構建)算法在AGV小車中的使用 目前,AGV廠家運用的最先進的導航方式
2018-11-09 15:59:01
一文看懂BP神經網絡的基礎數學知識
2020-06-16 07:14:35
FPGA加速的關鍵因素是什么?EdgeBoard中神經網絡算子在FPGA中的實現方法是什么?
2021-09-28 06:37:44
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
(以下內容來自開發者分享,不代表 OpenHarmony 項目群工作委員會觀點)徐浩隱式查詢是 OpenAtom OpenHarmony(以下簡稱“OpenHarmony”)的一個基礎能力,被
2022-03-22 18:35:18
STM32中文顯示有什么抗鋸齒方法
2023-10-15 11:49:31
您好,我使用了兩個選項來改變浮點到余弦角的整數。但是我得到了如下警告:警告[356 ]代碼\ADC.C;282.27將浮點到整數的隱式轉換。所以不能得到準確的結果。我的代碼
2019-09-06 12:07:02
習神經神經網絡,對于神經網絡的實現是如何一直沒有具體實現一下:現看到一個簡單的神經網絡模型用于訓練的輸入數據:對應的輸出數據:我們這里設置:1:節點個數設置:輸入層、隱層、輸出層的節點
2021-08-18 07:25:21
mysql 隱式轉換問題
2019-08-13 06:07:31
`BP神經網絡首先給出只包含一個隱層的BP神經網絡模型(兩層神經網絡): BP神經網絡其實由兩部分組成:前饋神經網絡:神經網絡是前饋的,其權重都不回送到輸入單元,或前一層輸出單元(數據信息是單向
2019-07-21 04:00:00
:warning:(361)函數聲明為隱式int.,這似乎對代碼的實際編譯或運行沒有任何影響,但是它有點煩人。有什么想法,為什么這個特定的功能是扔這個警告?
2019-10-24 13:23:19
人工神經網絡(Artificial Neural Network,ANN)是一種類似生物神經網絡的信息處理結構,它的提出是為了解決一些非線性,非平穩,復雜的實際問題。那有哪些辦法能實現人工神經網絡呢?
2019-08-01 08:06:21
優化神經網絡訓練方法有哪些?
2022-09-06 09:52:36
隱裂、熱斑、PID效應,是影響晶硅性能的三個重要因素。今天兔子君帶大家了解一下電池片隱裂的原因、如何識別及預防方法。1. 什么是“隱裂”隱裂是晶體硅組件的一種較為常見的缺陷,通俗的講,就是一些肉眼
2018-10-15 19:58:03
inference在設備端上做。嵌入式設備的特點是算力不強、memory小。可以通過對神經網絡做量化來降load和省memory,但有時可能memory還吃緊,就需要對神經網絡在memory使用上做進一步優化
2021-12-23 06:16:40
的突破。AlexNet 在百萬 量級的 ImageNet數據集上對于圖像分類的精度大幅 度超過傳統方法,一舉摘下了視覺領域競賽 ILSVRC2012的桂冠。自 AlexNet之后,研究者從卷積神經網 絡
2022-08-02 10:39:39
和神經網絡包。AIoT那么火,為何大家卻止步于科普文?因為現成的機器學習框架都太復雜太難用。NNoM從一開始就被設計成提供給嵌入式大佬們的一個簡單易用的神經網絡框架。你不需要會TensorFlow
2019-05-01 19:03:01
題目:基于SLAM的移動機器人設計嵌入式PPT應具有的幾個部分1、有哪些硬件 1)小車 2)STM32F429開發板 3)樹莓派3b+開發板 4)4g通信模塊 5)GPS模塊 6
2021-11-08 06:17:14
摘 要:本文給出了采用ADXL335加速度傳感器來采集五個手指和手背的加速度三軸信息,并通過ZigBee無線網絡傳輸來提取手勢特征量,同時利用BP神經網絡算法進行誤差分析來實現手勢識別的設計方法
2018-11-13 16:04:45
FPGA實現神經網絡關鍵問題分析基于FPGA的ANN實現方法基于FPGA的神經網絡的性能評估及局限性
2021-04-30 06:58:13
基于深度神經網絡的激光雷達物體識別系統及其嵌入式平臺部署
2021-01-04 06:26:23
基于視覺的slam自動駕駛,這是我們測試的視頻《基于slam算法的智能機器人》調研分析報告項目背景分析機器人曾經是科幻電影中的形象,可目前已經漸漸走入我們的生活。機器人技術以包含機械、電子、自動控制
2021-08-09 09:37:34
嵌入式系統開發與應用——基于視覺的機器人SLAM入門實踐1一、OpenCV的安裝與配置1. 下載OpenCV3.4.1并解壓到ubuntu相應目錄上2. 下載安裝依賴庫和編譯工具cmake(1)更新
2021-12-16 08:16:12
的貝葉斯分類器得到了廣泛的認可。 徑向基函數(RBF)網絡是一種性能良好的前饋型三層神經網絡,具有全局逼近性質和最佳逼近性能,訓練方法快速易行,RBF 函數還具有局部響應的生物合理性。RBF神經
2009-10-23 10:03:57
人工智能下面有哪些機器學習分支?如何用卷積神經網絡(CNN)方法去解決機器學習監督學習下面的分類問題?
2021-06-16 08:09:03
作者:李云紅0 引言自20世紀70年代以來,模擬電路故障診斷領域已經取得了一定的研究成果,近年來,基于神經網絡技術的現代模擬電路軟故障診斷方法已成為新的研究熱點,神經網絡的泛化能力和非線性映射能力
2019-07-05 08:06:02
人工神經網絡在AI中具有舉足輕重的地位,除了找到最好的神經網絡模型和訓練數據集之外,人工神經網絡的另一個挑戰是如何在嵌入式設備上實現它,同時優化性能和功率效率。 使用云計算并不總是一個選項,尤其是當
2021-11-09 08:06:27
大家好,我想學習SLAM技術有資深的老師愿意教我嗎?qq:496397940
2018-11-09 13:42:27
下面來探討一下深度學習在嵌入式設備上的應用,具體如下:1、深度學習的概念源于人工神經網絡的研究,包含多個隱層的多層感知器(MLP) 是一種原始的深度學習結構。深度學習通過組合低層特征形成更加抽象
2021-10-27 08:02:31
最近對于這些經常出現在論文里面的永磁同步電機型別經常搞混,特別是面裝式內置式和凸極性隱極性的對應關系,經常是混淆的,在這里專門區分一下。1、按永磁體在鐵芯上的安裝位置不同,可以將永磁同步電機分為,表
2021-08-27 08:09:59
小女子做基于labview的蒸發過程中液位的控制,想使用神經網絡pid控制,請問這個控制方法可以嗎?有誰會神經網絡pid控制么。。。叩謝
2016-09-23 13:43:16
什么是回環檢測?在講解回環檢測前,我們先來了解下回環的概念。在視覺SLAM問題中,位姿的估計往往是一個遞推的過程,即由上一幀位姿解算當前幀位姿,因此其中的誤差便這樣一幀一幀的傳遞下去,也就是我們
2018-10-23 17:47:22
SLAM(同步定位與地圖構建),是指運動物體根據傳感器的信息,一邊計算自身位置,一邊構建環境地圖的過程,解決機器人等在未知環境下運動時的定位與地圖構建問題。目前,SLAM 的主要應用于機器人、無人機、無人駕駛、AR、VR 等領域。其用途包括傳感器自身的定位,以及后續的路徑規劃、運動性能、場景理解。
2020-05-20 08:19:40
機器人定位導航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術和產品落地上都較為成熟,因而成為現下最為主流的定位導航方式,在家用掃地機器人及商用送餐機器人等服務機器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
什么是激光SLAM?激光SLAM技術在機器人運動控制系統中的應用是什么?
2021-07-30 06:37:25
常見的問題,但也不必過度擔心。 3. 識別“隱裂”的方法 EL(Electroluminescence,電致發光)是一種太陽能電池或組件的內部缺陷檢測設備,是簡單有效的檢測隱裂的方法。利用晶體硅
2020-12-09 15:33:38
硬件難學?首先搞懂單片機、ARM、MUC、DSP、FPGA、嵌入式錯綜復雜的關系!
2017-10-14 20:05:14
【總結】視覺SLAM筆記整理
2020-07-17 14:05:20
圖引擎,讓機器人在復雜、大面積的場景下也能輕松應對,穩定發揮,完成定位導航任務。 傳統SLAM 及SLAM 3.0的建圖對比: -建圖精度高,圖優化式建圖 - 主動閉環修正 - 建圖穩定、不
2019-01-21 10:57:46
)Makefile的工作原理Makefile自動檢測更新Makefile隱式規則Makefile隱式規則 - 簡化2Makefile隱式聲明 - 簡化3Makefile的變量替換Makefile優化
2021-12-15 08:58:21
專門針對Arm嵌入式設備優化的神經網絡推理引擎Tengine + HCL,不同人群的量身定制
2021-01-15 08:00:42
納米技術制作,芯片面積只有4.36平方毫米。“前兩個因素使 Hiddenite 芯片與現有的 DNN 推理加速器區別開來,”motoura 教授說。“此外,我們還引入了一種新的隱式神經網絡訓練方法,稱為
2022-03-17 19:15:13
實現單目視覺同時定位與建圖(SLAM)仿真系統,描述其設計過程。該系統工作性能良好,其SLAM算法可擴展性強,可以精確逼近真實單目視覺SLAM過程。以方便SLAM算法的研究為目標,提
2009-04-15 08:50:37 82
82 基于模糊聚類的神經元識別方法_張晶
2017-01-08 11:13:290 基于模糊聚類方法的神經元形態分類識別_劉輝舟
2017-03-16 10:31:520 基于神經網絡的聚類方法研究_胡偉
2017-03-16 09:37:530 、幀間配準、位姿變換估計以及閉環檢測對SLAM系統的影響,建立了關鍵幀閉環匹配算法和SLAM實時性與魯棒性之間的關系,提出了一種基于ORB關鍵幀匹配算法的SLAM方法。運用改進ORB算法加快了圖像特征點提取與描述符建立速度;結合相機模型與深度信息,
2018-03-26 10:57:326 高仙的SLAM2.0技術體系核心,是基于多傳感器融合+深度學習的架構,即語義SLAM。高仙SLAM2.0技術方案以語義分析、機器學習為基礎,結合云端實時信息處理以及專為多傳感器融合而開發的專業算法體系,真正實現了SLAM在建圖和導航兩個環節的完整應用。
2018-05-15 16:48:308535 本文是調研視覺SLAM中的實現方法的總結,包括三方面內容:姿態計算、閉環檢測、BA優化。
2019-05-18 11:49:014037 運動恢復結構(SfM)和 SLAM 所解決的問題非常相似,但 SfM 傳統上是以離線形式進行的,而 SLAM 則已經慢慢走向了低功耗/實時/單 RGB 相機的運行模式。
2019-11-22 14:34:0716984 
如今科技發展日新月異,諸如機器人、AR/VR等前沿科技產品已走入了大眾生活當中。但是想在這些領域讓用戶有更好的體驗,就需要很多底層技術的支持,SLAM就是其中之一。如果說機器人離開了SLAM
2020-04-17 09:21:4153848 本文研究了基于多傳感器組合導航方法的SLAM,由于移動機器人無法通過單個傳感器得到可靠的信息,采用多傳感器組合導航的方法可以很好的解決這個問題。本文用單個CCD攝像頭和里程計組合進行SLAM研究
2020-08-07 17:14:0112 在業內,視覺SLAM與激光SLAM誰更勝一籌,誰將成為未來主流趨勢這一問題,成為大家關注的熱點,不同的人也有不同的看法及見解,以下將從成本、應用場景、地圖精度、易用性幾個方面來進行詳細闡述。
2020-08-28 14:53:3016068 
同時定位與地圖構建(SLAM)作為機器人領域的硏究熱點,近年來取得了快速發展,但多數SLAM方法未考慮應用場景中的動態或可移動目標。針對該問題,提出一種適用于動態場景的SLAM方法。將基于深度學習
2021-03-18 10:39:3916 針對基于RBPF的激光SLAM算法在重采樣過程中出現的樣本貧化和激光測量模型不準確的問題,提出種優化的激光SLAM算法。為緩解重采樣過程中的樣本貧化問題,采用最小采樣方差重采樣方法改進原重采樣方法
2021-04-01 10:48:316 課題組已將該研究成果應用于智能駕駛即時定位與建圖(SLAM)任務中,提出了基于三維激光數據的層級式SLAM方法,實現了無GNSS環境下智能無人系統的高精度自主定位定姿,在智能駕駛國際著名公開數據集KITTI上排名全球第7(純激光SLAM算法中排名全球第4)。
2021-04-20 09:19:301806 
高效共享與利用的難題,面向快速、準確、大范圍多機協同SLAM需求,本文提出了一種基于集中式架構的多無人機局部地圖數據高效共享和融合的SLAM方法Data Sharing Oriented Multi-uav Collaborative SLAM( DSM-SLAM)。該方法創新性地提出了:(1)基于
2021-06-02 11:29:378 我看來,vslam得發展也就是從MonoSLAM->PTAM->圖優化SLAM->ORB-SLAM為代表的現代slam,其中可能還有許多內容,不過這些開源SLAM一定程度上體現了SLAM發展過程了....
2021-06-18 10:40:521357 
./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 近年來,使用機器學習技術進行特征提取的基于調制解調器特征的SLAM越來越受到關注,并有望在幾乎所有機器人工作環境中超越傳統方法。
2022-10-17 16:39:46603 (Visual SLAM,VSLAM)是將圖像作為主要環境感知信息源的SLAM系統,VSLAM以計算相機位姿為主要目標,通過多視幾何方法構建3D地圖[4]
2022-12-02 15:00:281149 手持SLAM設備最大的特點肯定要放到手持這個動作上面,由于SLAM算法的優越性,手持可以做到走到哪里測到哪里。
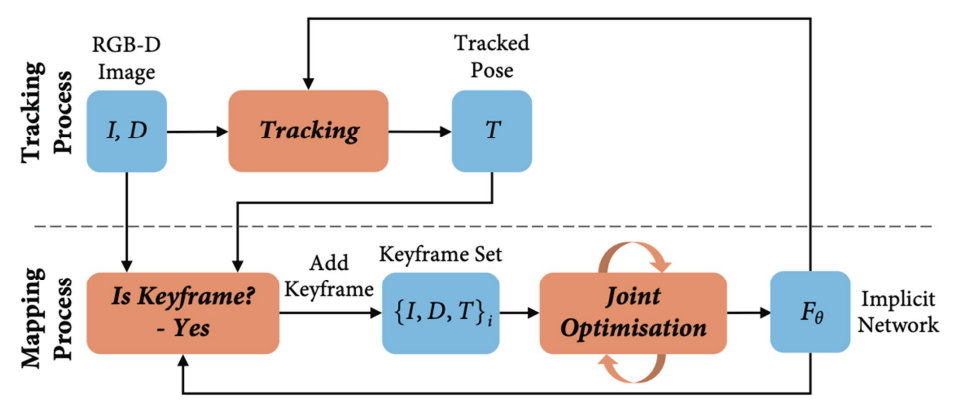
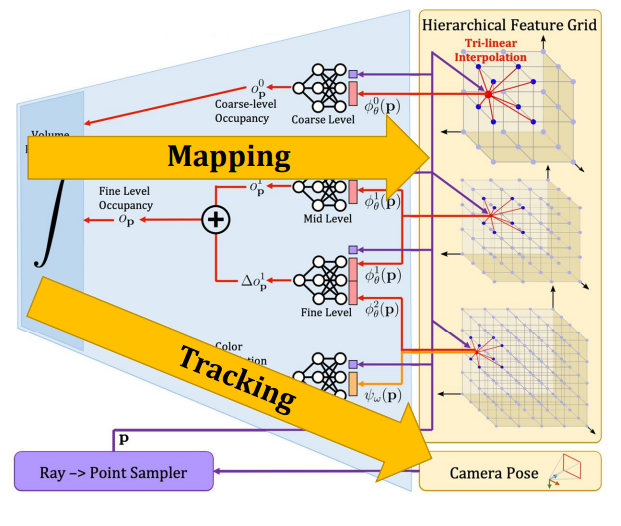
2022-12-27 10:43:413287 我們提出了NICE-SLAM,一個密集的RGB-D SLAM系統,它具有實時性、可擴展性、預測性和對各種挑戰性場景的魯棒性。
2023-01-30 11:19:29451 我們提出了一個新的幾何和光度3D映射管道,用于從單眼圖像中準確和實時地重建場景。為了實現這一目標,我們利用了最近在密集單眼SLAM和實時分層容積神經輻射場方面的進展。
2023-01-30 11:24:13491 我們提出了一種利用深度密集單目 SLAM 和快速不確定性傳播從圖像重建 3D 場景的新方法。所提出的方法能夠密集、準確、實時地 3D 重建場景,同時對來自密集單目 SLAM 的極其嘈雜的深度估計具有魯棒性。
2023-01-30 11:34:22449 vMAP 是一種基于神經場的對象級密集 SLAM 系統,可根據 RGB-D 輸入流實時自動構建對象級場景模型。
2023-06-15 09:29:13498 
近日,全國SLAM技術論壇于廈門大學舉辦。本次論壇聚焦SLAM和相關技術的前沿發展以及在應用領域的行業機會,旨在為SLAM技術和應用領域搭建全方位展示與交流平臺,推動國內SLAM技術的發展以及產學研
2023-08-01 09:37:23526 近年來,SLAM技術取得了驚人的發展,領先一步的激光SLAM已成熟的應用于各大場景中,視覺SLAM雖在落地應用上不及激光SLAM,但也是目前研究的一大熱點,今天我們就來詳細聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:111389 
提出了一種基于RGB-D圖像序列的協同隱式神經同步定位與建圖(SLAM)系統,該系統由完整的前端和后端模塊組成,包括里程計、回環檢測、子圖融合和全局優化。
2023-11-29 10:35:18189 
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論