我們?cè)窒磉^(guò)的實(shí)時(shí)圖像識(shí)別只是其中一種應(yīng)用。我們還可以利用深度學(xué)習(xí)來(lái)做超分辨率。我們這次就分享一下用于超分辨率的深度學(xué)習(xí)基本框架,以及衍生出的各種網(wǎng)絡(luò)模型,其中有些網(wǎng)絡(luò)在滿足實(shí)時(shí)性方面也有不錯(cuò)的表現(xiàn)。
2018-07-13 09:40:00 14258
14258 
深度學(xué)習(xí)與圖神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)分享:CNN 經(jīng)典網(wǎng)絡(luò)之-ResNet resnet 又叫深度殘差網(wǎng)絡(luò) 圖像識(shí)別準(zhǔn)確率很高,主要作者是國(guó)人哦 深度網(wǎng)絡(luò)的退化問(wèn)題 深度網(wǎng)絡(luò)難以訓(xùn)練,梯度消失,梯度爆炸
2022-10-12 09:54:42685 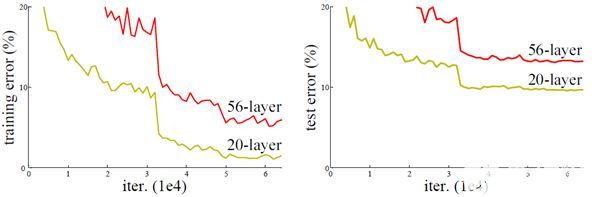
自然語(yǔ)言處理領(lǐng)域的最新研究進(jìn)展,然后重點(diǎn)介紹深度學(xué)習(xí)方法在彈幕語(yǔ)義表示,詩(shī)歌生成,實(shí)體蘊(yùn)含關(guān)系識(shí)別,試題難度預(yù)測(cè)的相關(guān)應(yīng)用。 2、報(bào)告題目:基于大規(guī)模弱標(biāo)注數(shù)據(jù)的深度學(xué)習(xí) 報(bào) 告 人:楊奎元 微軟研究院
2017-03-22 17:16:00
具有深度學(xué)習(xí)模型的嵌入式系統(tǒng)應(yīng)用程序帶來(lái)了巨大的好處。深度學(xué)習(xí)嵌入式系統(tǒng)已經(jīng)改變了各個(gè)行業(yè)的企業(yè)和組織。深度學(xué)習(xí)模型可以幫助實(shí)現(xiàn)工業(yè)流程自動(dòng)化,進(jìn)行實(shí)時(shí)分析以做出決策,甚至可以預(yù)測(cè)預(yù)警。這些AI
2021-10-27 06:34:15
內(nèi)容2:課程一: Tensorflow入門到熟練:課程二:圖像分類:課程三:物體檢測(cè):課程四:人臉識(shí)別:課程五:算法實(shí)現(xiàn):1、卷積神經(jīng)網(wǎng)絡(luò)CNN2、循環(huán)神經(jīng)網(wǎng)絡(luò)RNN3、強(qiáng)化學(xué)習(xí)DRL4、對(duì)抗性生成
2021-01-09 17:01:54
識(shí)別的準(zhǔn)確性和效率。神經(jīng)網(wǎng)絡(luò)是機(jī)器學(xué)習(xí)的一個(gè)分支,而深度學(xué)習(xí)又是神經(jīng)網(wǎng)絡(luò)的一個(gè)大分支,深度學(xué)習(xí)的基本結(jié)構(gòu)是深度神經(jīng)網(wǎng)絡(luò)。
2018-07-04 16:07:53
的網(wǎng)絡(luò)最終來(lái)實(shí)現(xiàn)更通用的識(shí)別。這些多層的優(yōu)點(diǎn)是各種抽象層次的學(xué)習(xí)特征。例如,若訓(xùn)練深度卷積神經(jīng)網(wǎng)絡(luò)(CNN)來(lái)對(duì)圖像進(jìn)行分類,則第一層學(xué)習(xí)識(shí)別邊緣等最基本的東西…
2022-11-11 07:55:50
幫助解釋模型的決策過(guò)程。
總結(jié)起來(lái),基于深度學(xué)習(xí)的醫(yī)學(xué)圖像分割與病變識(shí)別是醫(yī)療領(lǐng)域中的重要應(yīng)用之一。通過(guò)適當(dāng)?shù)臄?shù)據(jù)準(zhǔn)備、模型設(shè)計(jì)和性能評(píng)估,深度學(xué)習(xí)模型能夠準(zhǔn)確地進(jìn)行圖像分割和病變識(shí)別,為醫(yī)生提供寶貴
2023-09-04 11:11:23
深度學(xué)習(xí)常用模型有哪些?深度學(xué)習(xí)常用軟件工具及平臺(tái)有哪些?深度學(xué)習(xí)存在哪些問(wèn)題?
2021-10-14 08:20:47
內(nèi)容2:課程一: TensoRFlow入門到熟練:課程二:圖像分類:課程三:物體檢測(cè):課程四:人臉識(shí)別:課程五:算法實(shí)現(xiàn):1、卷積神經(jīng)網(wǎng)絡(luò)CNN2、循環(huán)神經(jīng)網(wǎng)絡(luò)RNN3、強(qiáng)化學(xué)習(xí)DRL4、對(duì)抗性生成
2021-01-10 13:42:26
深度融合模型的特點(diǎn),背景深度學(xué)習(xí)模型在訓(xùn)練完成之后,部署并應(yīng)用在生產(chǎn)環(huán)境的這一步至關(guān)重要,畢竟訓(xùn)練出來(lái)的模型不能只接受一些公開(kāi)數(shù)據(jù)集和榜單的檢驗(yàn),還需要在真正的業(yè)務(wù)場(chǎng)景下創(chuàng)造價(jià)值,不能只是為了PR而
2021-07-16 06:08:20
車牌識(shí)別VI程序,僅供參考
2020-09-29 19:18:04
有人會(huì)用labVIEW做一個(gè)車牌識(shí)別程序嗎?
2012-06-15 05:15:12
教程車牌識(shí)別應(yīng)該能幫助到正在學(xué)習(xí)的你。
2021-04-26 19:57:57
車牌識(shí)別PDA是在智能手持終端的基礎(chǔ)上集成車牌號(hào)識(shí)別算法的移動(dòng)設(shè)備,采用目前用戶量最多的安卓方案,界面與智能手機(jī)相同,操作簡(jiǎn)單。同時(shí)具備車牌號(hào)掃描識(shí)別、無(wú)線通信、熱敏打印等功能,已經(jīng)被廣泛的應(yīng)用于
2018-09-19 15:05:39
ios車牌識(shí)別移動(dòng)端車牌識(shí)別
2019-04-28 09:43:31
其中任意圖片文件就可以進(jìn)行測(cè)試。由于我的車牌圖片不多(都是網(wǎng)上找的),質(zhì)量不高,而且字符模版精度不夠,所以字符識(shí)別有一定的誤差,見(jiàn)笑了,不過(guò)車牌位置定位還是很準(zhǔn)的(要求安裝LabVIEW 2014和Vision 2014)。
2015-06-30 10:33:09
著手,使用Nanopi2部署已訓(xùn)練好的檢測(cè)模型,例如硅谷電視劇的 Not Hotdog 檢測(cè)器應(yīng)用,會(huì)在復(fù)雜的深度學(xué)習(xí)歷程中有些成就感。 目前已有幾十種流行的深度學(xué)習(xí)算法庫(kù),參考網(wǎng)址:https
2018-06-04 22:32:12
SW Framework基于深度神經(jīng)網(wǎng)絡(luò) (DNN) 的機(jī)器學(xué)習(xí)算法用于許多行業(yè),例如機(jī)器人、工業(yè)和汽車。越來(lái)越多的基于 DNN 的機(jī)器學(xué)習(xí)算法被應(yīng)用于 ADAS 產(chǎn)品中,如車道線檢測(cè),交通信號(hào)燈識(shí)別
2022-11-03 06:53:11
有沒(méi)有l(wèi)abview做車牌識(shí)別的經(jīng)驗(yàn)或資料 求指導(dǎo)謝謝
2012-11-21 10:27:00
神經(jīng)元結(jié)構(gòu),用計(jì)算機(jī)構(gòu)造的簡(jiǎn)化了的人腦神經(jīng)網(wǎng)絡(luò)模型,其主要用于圖像分類和識(shí)別。labview是一個(gè)廣泛應(yīng)用于工業(yè)自動(dòng)化測(cè)控領(lǐng)域的編程平臺(tái),其具有很多不同行業(yè)的算法庫(kù),例如vision視覺(jué)庫(kù),集成了常用的視覺(jué)
2020-07-23 20:33:10
安裝labview2019 vision,自帶深度學(xué)習(xí)推理工具,支持tensorflow模型。配置好python下tensorflow環(huán)境配置好object_detection API下載SSD模型
2020-08-16 17:21:38
本帖最后由 wcl86 于 2021-9-9 10:39 編輯
`labview調(diào)用深度學(xué)習(xí)tensorflow模型非常簡(jiǎn)單,效果如下,附上源碼和訓(xùn)練過(guò)的模型:[hide][/hide
2021-06-03 16:38:25
,圖片模型訓(xùn)練數(shù)量從百萬(wàn)級(jí)下降到千級(jí) 企業(yè)進(jìn)行深度學(xué)習(xí)訓(xùn)練的第三個(gè)困難是訓(xùn)練數(shù)據(jù)量大。深度學(xué)習(xí)模型訓(xùn)練,要使用大量的訓(xùn)練數(shù)據(jù)。這已經(jīng)是深度學(xué)習(xí)模型訓(xùn)練的常態(tài)。以圖像識(shí)別為例,通用場(chǎng)景的圖像識(shí)別算法
2018-08-02 20:44:09
項(xiàng)目名稱:車牌識(shí)別系統(tǒng)試用計(jì)劃:申請(qǐng)理由本人在嵌入式開(kāi)發(fā)行業(yè)從事了五年的開(kāi)發(fā)經(jīng)驗(yàn),在智能家居,無(wú)線mesh網(wǎng)絡(luò)領(lǐng)域擁有豐富的經(jīng)驗(yàn)。并且自學(xué)AI EasyPR等機(jī)器識(shí)別知識(shí)。項(xiàng)目計(jì)劃①快速熟悉鴻蒙相關(guān)
2020-11-18 18:15:23
項(xiàng)目名稱:智能充電站項(xiàng)目-車牌識(shí)別、刷臉充電、空閑車位試用計(jì)劃:申請(qǐng)理由本人在AI領(lǐng)域有三年多的學(xué)習(xí)和開(kāi)發(fā)經(jīng)驗(yàn),曾主導(dǎo)開(kāi)發(fā)公司AI平臺(tái),對(duì)計(jì)算機(jī)視覺(jué)標(biāo)注,圖像視頻目標(biāo)檢測(cè)識(shí)別,在云端自研為公司實(shí)現(xiàn)了
2020-11-18 18:42:58
./test_jpeg_platenum plate_num samples_platenum.jpg
車牌檢測(cè)原圖
“Plate Recognition”(車牌識(shí)別)庫(kù)使用分類網(wǎng)絡(luò)來(lái)識(shí)別車牌編號(hào)(僅限中文車牌)。輸入是車牌檢測(cè)到的車牌圖片。輸出是包含車牌編號(hào)信息的結(jié)構(gòu)。下圖顯示了車牌識(shí)別的結(jié)果。
2023-09-26 16:28:10
,非線性回歸,手寫(xiě)數(shù)字分類模型開(kāi)始講起。逐步講到一些深度學(xué)習(xí)網(wǎng)絡(luò)的應(yīng)用如CNN,LSTM。最后會(huì)帶著大家完成一些實(shí)際的應(yīng)用案例如圖像識(shí)別,圖片風(fēng)格轉(zhuǎn)換,seq2seq模型的應(yīng)用,情感分類,生成對(duì)抗網(wǎng)絡(luò)等。下面
2018-07-17 11:40:31
LABVIEW車牌識(shí)別
2018-07-21 16:38:35
項(xiàng)目名稱:AIoT領(lǐng)域車牌識(shí)別Demo試用計(jì)劃:申請(qǐng)理由目前在調(diào)研的車牌識(shí)別項(xiàng)目主要是字母和數(shù)字識(shí)別,要用到AI加速器,比如在edge計(jì)算場(chǎng)景加速深度學(xué)習(xí)庫(kù)TensorFlow,pytorch等等
2019-09-23 15:40:22
項(xiàng)目名稱:AIoT領(lǐng)域車牌識(shí)別Demo試用計(jì)劃:申請(qǐng)理由目前在調(diào)研的車牌識(shí)別項(xiàng)目主要是字母和數(shù)字識(shí)別,要用到AI加速器,比如在edge計(jì)算場(chǎng)景加速深度學(xué)習(xí)庫(kù)TensorFlow,pytorch等等
2021-12-28 10:33:22
本帖最后由 Kevin_Deng 于 2017-5-28 11:27 編輯
圖像處理早已被廣泛應(yīng)用于機(jī)器視覺(jué)、深度學(xué)習(xí)等熱門領(lǐng)域,奈何由于某些局限性,導(dǎo)致我們對(duì)于圖像處理的相關(guān)算法知道得
2017-05-25 21:07:04
字符識(shí)別是車牌識(shí)別系統(tǒng)的核心部分,本文構(gòu)造了BP神經(jīng)網(wǎng)絡(luò)進(jìn)行車牌識(shí)別。通過(guò)反復(fù)修正各個(gè)參數(shù)使該識(shí)別算法快速準(zhǔn)確,并且具有良好的穩(wěn)定性,能滿足車牌實(shí)時(shí)識(shí)別的要求。1 車牌定位1.1 圖像預(yù)處理(1)尺寸
2011-07-14 09:05:28
什么是深度學(xué)習(xí)為了解釋深度學(xué)習(xí),有必要了解神經(jīng)網(wǎng)絡(luò)。神經(jīng)網(wǎng)絡(luò)是一種模擬人腦的神經(jīng)元和神經(jīng)網(wǎng)絡(luò)的計(jì)算模型。作為具體示例,讓我們考慮一個(gè)輸入圖像并識(shí)別圖像中對(duì)象類別的示例。這個(gè)例子對(duì)應(yīng)機(jī)器學(xué)習(xí)中的分類
2023-02-17 16:56:59
network,DBN)[24], 從此拉開(kāi)了深度學(xué)習(xí)大幕。隨著深度學(xué)習(xí)理論的研究和發(fā)展,研究人員提 出了一系列卷積神經(jīng)網(wǎng)絡(luò)模型。為了比較不同模型 的質(zhì)量,收集并整理了文獻(xiàn)中模型在分類任務(wù)上的 識(shí)別率,如圖 1
2022-08-02 10:39:39
的激光雷達(dá)物體識(shí)別技術(shù)一直難以在嵌入式平臺(tái)上實(shí)時(shí)運(yùn)行。經(jīng)緯恒潤(rùn)經(jīng)過(guò)潛心研發(fā),攻克了深度神經(jīng)網(wǎng)絡(luò)在嵌入式平臺(tái)部署所面臨的算子定制與加速、量化策略、模型壓縮等難題,率先實(shí)現(xiàn)了高性能激光檢測(cè)神經(jīng)網(wǎng)絡(luò)并成功地在嵌入式平臺(tái)(德州儀TI TDA4系列)上完成部署。系統(tǒng)功能目前該系統(tǒng):?支持接入禾賽Pandar 40和
2021-12-21 07:59:18
應(yīng)用C語(yǔ)言編程,系統(tǒng)能夠?qū)?b class="flag-6" style="color: red">車牌進(jìn)行識(shí)別,并能夠?qū)?b class="flag-6" style="color: red">車牌進(jìn)行預(yù)處理,灰度化,圖像二值化,字符分割,字符識(shí)別等一系列的應(yīng)用,跪求大神幫助
2020-06-01 15:56:39
提供給數(shù)學(xué)數(shù)據(jù)模型,可以分為監(jiān)督、不受監(jiān)督和強(qiáng)化學(xué)習(xí)。機(jī)器學(xué)習(xí)的想法幾乎可以在每一個(gè)領(lǐng)域?qū)崿F(xiàn);社交媒體特寫(xiě)、互聯(lián)網(wǎng)產(chǎn)品建議、圖像識(shí)別和語(yǔ)言翻譯都是機(jī)器學(xué)習(xí)的范例。
與支持機(jī)器學(xué)習(xí)網(wǎng)絡(luò)的DNN(深
2023-08-29 06:46:48
又沒(méi)人做過(guò)基于LabVIEW的車牌識(shí)別系統(tǒng)或類似的?
2013-06-11 15:32:45
python+opencv實(shí)現(xiàn)車牌識(shí)別
2019-02-28 11:08:26
`[ 本帖最后由 乂乂統(tǒng)天下 于 2020-3-29 14:00 編輯 ]
新手學(xué)習(xí),多多關(guān)照,互相交流,共同進(jìn)步^-^【實(shí)現(xiàn)功能】通過(guò)MATLAB編程實(shí)現(xiàn)夜間車牌位置識(shí)別、提取車牌圖像【處理效果
2020-03-28 12:40:18
求助各位大神,最近實(shí)驗(yàn)室有個(gè)項(xiàng)目要做車牌識(shí)別,并且用zigbee組網(wǎng),我查了下嵌入式的車牌識(shí)別都是用linux系統(tǒng),想問(wèn)如果用ucos系統(tǒng)做車牌識(shí)別能夠處理嗎?我自己找資料沒(méi)找著用ucos做的,但linux太麻煩了,所以求助下啊!
2014-03-17 21:53:14
安卓車牌識(shí)別 ios車牌識(shí)別 移動(dòng)端車牌識(shí)別 手機(jī)端車牌識(shí)別 車牌識(shí)別sdk 前端車牌識(shí)別SDK算法同行業(yè)中,別人標(biāo)配有的產(chǎn)品我有,別人沒(méi)有的產(chǎn)品我們也有,如此才能增強(qiáng)競(jìng)爭(zhēng)力。車牌識(shí)別sdk這個(gè)用于
2018-05-17 22:55:40
移動(dòng)端車牌識(shí)別與PC端車牌識(shí)別有什么區(qū)別解析
2019-04-30 11:20:59
`安卓前端車牌識(shí)別技術(shù)SDK 安卓前端車牌識(shí)別技術(shù)是為促進(jìn)人工智能化建設(shè)研發(fā)而來(lái)的應(yīng)用。此應(yīng)用基于移動(dòng)端平臺(tái),手機(jī)、PDA、安卓系統(tǒng)帶200萬(wàn)像素以上的攝像頭,該安卓移動(dòng)端前端車牌識(shí)別技術(shù)sdk
2018-06-11 13:08:03
車牌識(shí)別系統(tǒng)是計(jì)算機(jī)視頻圖像識(shí)別技術(shù)在車輛牌照識(shí)別中的一種應(yīng)用,在高速公路ETC收費(fèi)站、停車場(chǎng)收費(fèi)站中得到了廣泛應(yīng)用。車牌識(shí)別系統(tǒng)是以計(jì)算機(jī)技能、圖畫(huà)處理技能、模糊辨認(rèn)為根底,樹(shù)立車輛的特征模型
2021-04-25 16:30:57
,把PC版車牌識(shí)別sdk嵌入控制電腦中,邊巡邏邊識(shí)別車牌,輕而易舉。目前在智能交通領(lǐng)域,人工智能分析及深度學(xué)習(xí)比較成熟的應(yīng)用技術(shù)以車牌識(shí)別算法最為理想,雖然目前很多廠商都宣稱自己的車牌識(shí)別率已經(jīng)達(dá)到
2019-01-02 16:59:47
車輛牌照的自動(dòng)識(shí)別是目標(biāo)自動(dòng)識(shí)別的一種重要形式。針對(duì)車牌識(shí)別的后期技術(shù),即牌照識(shí)別技術(shù)做了研究并提出了一種新的車牌識(shí)別方法,該網(wǎng)絡(luò)由BP 神經(jīng)網(wǎng)絡(luò)識(shí)別模塊和模糊控制
2009-07-08 15:38:10 16
16 車牌識(shí)別模塊是車牌識(shí)別(LPR)系統(tǒng)的核心。論文根據(jù)國(guó)內(nèi)汽車牌照的特點(diǎn),對(duì)車牌識(shí)別模塊中的預(yù)處理、字符分割及字符識(shí)別技術(shù)提出了改進(jìn)的算法,并基于DSP實(shí)現(xiàn)了對(duì)車牌純字符區(qū)域
2010-02-24 14:30:4042 完整的車牌識(shí)別MATLAB源代碼,車牌定位,區(qū)域切割,字符切割,字符識(shí)別
2016-06-16 17:57:4655 基于matlab的車牌識(shí)別技術(shù)_冀光強(qiáng)
2017-03-18 09:18:0511 對(duì)于一個(gè)城市來(lái)說(shuō),車輛的多少可以衡量這個(gè)城市的重要性和地位,那么車牌識(shí)別實(shí)現(xiàn)的方式有哪些,車輛牌照的識(shí)別是基于圖像分割和圖像識(shí)別理論,對(duì)含有車輛號(hào)牌的圖像進(jìn)行分析處理,從而確定牌照在圖像中的位置
2017-11-20 11:34:1715 針對(duì)場(chǎng)景標(biāo)注中如何產(chǎn)生良好的內(nèi)部視覺(jué)信息表達(dá)和有效利用上下文語(yǔ)義信息兩個(gè)至關(guān)重要的問(wèn)題,提出一種基于深度學(xué)習(xí)的多尺度深度網(wǎng)絡(luò)監(jiān)督模型。與傳統(tǒng)多尺度方法不同,模型主要由兩個(gè)深度卷積網(wǎng)絡(luò)組成:首先網(wǎng)絡(luò)
2017-11-28 14:22:100 車牌字符識(shí)別是智能車牌識(shí)別系統(tǒng)中的重要組成部分。針對(duì)車牌字符類別多、背景復(fù)雜影響正確識(shí)別率的問(wèn)題,提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的車牌字符識(shí)別方法。首先對(duì)車牌字符圖像進(jìn)行大小歸一化
2017-11-30 14:24:3621 車牌識(shí)別在日常生活已經(jīng)普遍得到運(yùn)用,為有效遏制城市內(nèi)車輛闖紅燈違章行為,現(xiàn)在城市內(nèi)各個(gè)路口都在大力安裝卡口式的闖紅燈違法行為的檢測(cè)系統(tǒng),而此系統(tǒng)最重要的組成部分就是車牌識(shí)別模塊。下面小編給大家介紹一下車牌識(shí)別系統(tǒng)常見(jiàn)問(wèn)題及其解決方法。
2018-01-02 14:17:4339005 車牌識(shí)別目前在我們生活中已經(jīng)隨車可見(jiàn),本文主要介紹了車牌識(shí)別的原理流程進(jìn)行了詳細(xì)的介紹,其次對(duì)如何破解小區(qū)車牌識(shí)別列出了三大方法,希望能幫到你。
2018-01-02 14:47:43378025 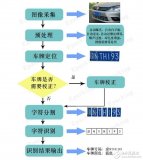
本文主要介紹了車牌識(shí)別系統(tǒng)原理、車牌識(shí)別技術(shù)的意義、車牌識(shí)別技術(shù)應(yīng)用表現(xiàn)和國(guó)內(nèi)車牌識(shí)別技術(shù)發(fā)展現(xiàn)狀以及車牌識(shí)別發(fā)展應(yīng)用前景廣闊。
2018-01-02 15:12:0516128 
目前車牌識(shí)別系統(tǒng)在我們的生活中隨處可見(jiàn),隨著車牌識(shí)別系統(tǒng)市場(chǎng)的興起,更多的品牌或企業(yè)都在紛紛競(jìng)爭(zhēng),本文就針對(duì)及車牌識(shí)別品牌全國(guó)排名前十進(jìn)行了詳細(xì)的介紹。
2018-01-02 15:37:4546902 
受限和高識(shí)別率要求,提取圖像的局部方向梯度直方圖( HOG)特征,構(gòu)建稀疏自編碼器棧對(duì)HOG特征進(jìn)行深層次編碼,設(shè)計(jì)Softmax多分類器對(duì)所抽取的特征進(jìn)行分類。在深度神經(jīng)網(wǎng)絡(luò)模型學(xué)習(xí)過(guò)程中,引入最小化各層結(jié)構(gòu)風(fēng)險(xiǎn)和微調(diào)全網(wǎng)
2018-03-20 17:30:420 深度學(xué)習(xí)被運(yùn)用于圖片分類、人物臉部識(shí)別和人物位置預(yù)測(cè)等識(shí)別領(lǐng)域。視頻人物動(dòng)作識(shí)別可看作隨時(shí)間變化圖片的分類問(wèn)題,所以圖片識(shí)別的深度學(xué)習(xí)方法也被大量使用在視頻人物動(dòng)作識(shí)別研究中。與計(jì)算機(jī)視覺(jué)的其他領(lǐng)域
2018-04-17 10:46:240 現(xiàn)階段比較受歡迎的圖像識(shí)別基礎(chǔ)算法為深度學(xué)習(xí)法,深度學(xué)習(xí)模型屬于神經(jīng)網(wǎng)絡(luò),而神經(jīng)網(wǎng)絡(luò)的歷史可追溯至上世紀(jì)四十年代,曾經(jīng)在八九十年代流行。神經(jīng)網(wǎng)絡(luò)試圖通過(guò)模擬大腦認(rèn)知的激勵(lì),解決各種機(jī)器學(xué)習(xí)的問(wèn)題。
2018-05-25 15:59:314678 。滿足各種場(chǎng)合下的工作需求。車牌識(shí)別速度快車牌號(hào)是車輛唯一的身份信息。智谷聯(lián)ZKC3506Y移動(dòng)車牌識(shí)別PDA采用深度優(yōu)化的車牌是被算法,只需車輛車牌號(hào),便可快速準(zhǔn)確的識(shí)別車牌號(hào)碼。車牌輸入法采用停車
2018-09-26 15:48:19727 近年來(lái),隨著深度學(xué)習(xí)在圖像視覺(jué)領(lǐng)域的發(fā)展,一類基于單純的深度學(xué)習(xí)模型的點(diǎn)云目標(biāo)檢測(cè)方法被提出和應(yīng)用,本文將詳細(xì)介紹其中一種模型——SqueezeSeg,并且使用ROS實(shí)現(xiàn)該模型的實(shí)時(shí)目標(biāo)檢測(cè)。
2018-11-05 16:47:2917181 為了有效提高無(wú)人機(jī)航拍圖像的識(shí)別準(zhǔn)確率,本文提出了一種基于深度殘差網(wǎng)絡(luò)的深度卷積神經(jīng)網(wǎng)絡(luò)模型。該模型在深度殘差網(wǎng)絡(luò)的基礎(chǔ)上使用了隨機(jī)化ReLU激勵(lì)函數(shù),能夠使網(wǎng)絡(luò)擁有更加快速的收斂速度,同時(shí)針對(duì)深度
2018-11-16 17:17:165 圖像識(shí)別技術(shù)的高價(jià)值應(yīng)用就發(fā)生在你我身邊,例如視頻監(jiān)控、自動(dòng)駕駛和智能醫(yī)療等,而這些圖像識(shí)別最新進(jìn)展的背后推動(dòng)力是深度學(xué)習(xí)。深度學(xué)習(xí)的成功主要得益于三個(gè)方面:大規(guī)模數(shù)據(jù)集的產(chǎn)生、強(qiáng)有力的模型的發(fā)展
2018-12-01 08:54:2930973 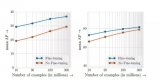
什么是車牌識(shí)別?車牌識(shí)別技術(shù)常見(jiàn)的應(yīng)用有PC端(或稱服務(wù)器端)車牌識(shí)別和嵌入式端車牌識(shí)別(如常見(jiàn)的車牌識(shí)別一體機(jī)),但是最近大家也肯定有聽(tīng)到過(guò)移動(dòng)端車牌識(shí)別,而且發(fā)展迅猛,很多應(yīng)用場(chǎng)景都有它的身影
2019-01-02 17:30:131157 本文檔的詳細(xì)介紹的是快速了解神經(jīng)網(wǎng)絡(luò)與深度學(xué)習(xí)的教程資料免費(fèi)下載主要內(nèi)容包括了:機(jī)器學(xué)習(xí)概述,線性模型,前饋神經(jīng)網(wǎng)絡(luò),卷積神經(jīng)網(wǎng)絡(luò),循環(huán)神經(jīng)網(wǎng)絡(luò),網(wǎng)絡(luò)優(yōu)化與正則化,記憶與注意力機(jī)制,無(wú)監(jiān)督學(xué)習(xí),概率圖模型,玻爾茲曼機(jī),深度信念網(wǎng)絡(luò),深度生成模型,深度強(qiáng)化學(xué)習(xí)
2019-02-11 08:00:0025 目前在深度學(xué)習(xí)領(lǐng)域分類兩個(gè)派別,一派為學(xué)院派,研究強(qiáng)大、復(fù)雜的模型網(wǎng)絡(luò)和實(shí)驗(yàn)方法,為了追求更高的性能;另一派為工程派,旨在將算法更穩(wěn)定、高效的落地在硬件平臺(tái)上,效率是其追求的目標(biāo)。復(fù)雜的模型固然具有
2019-06-08 17:26:004836 
車牌識(shí)別(LPR)系統(tǒng)是以圖像處理、模式識(shí)別等技術(shù)為基礎(chǔ)的智能識(shí)別系統(tǒng),通過(guò)攝像機(jī)所拍攝道路上行駛的車輛圖像進(jìn)行車牌號(hào)碼的識(shí)別。
2019-06-27 09:35:164182 現(xiàn)在深度學(xué)習(xí)模型開(kāi)始走向應(yīng)用,因此我們需要把深度學(xué)習(xí)網(wǎng)絡(luò)和模型部署到一些硬件上,而現(xiàn)有一些模型的參數(shù)量由于過(guò)大,會(huì)導(dǎo)致在一些硬件上的運(yùn)行速度很慢,所以我們需要對(duì)深度學(xué)習(xí)模型進(jìn)行小型化處理。
2020-01-28 17:40:003658 
車牌的檢測(cè)和識(shí)別的應(yīng)用非常廣泛,比如交通違章車牌追蹤,小區(qū)或地下車庫(kù)門禁。在對(duì)車牌識(shí)別和檢測(cè)的過(guò)程中,因?yàn)?b class="flag-6" style="color: red">車牌往往是規(guī)整的矩形,長(zhǎng)寬比相對(duì)固定,色調(diào)紋理相對(duì)固定,常用的方法有:基于形狀、基于色調(diào)
2020-02-03 15:21:213591 的分析識(shí)別更是研究的重中之重。近年來(lái)深 10 度學(xué)習(xí)模型的廣泛發(fā)展和計(jì)算能力的大幅提升對(duì)語(yǔ)音識(shí)別技術(shù)的提升起到了關(guān)鍵作用。本文立足于語(yǔ)音識(shí)別與深度學(xué)習(xí)理論緊密結(jié)合,針對(duì)如何利用深度學(xué)習(xí)模型搭建區(qū)分能力更強(qiáng)魯棒性更
2020-05-09 08:00:0041 都離不開(kāi)人工智能領(lǐng)域研究者們的長(zhǎng)期努力。特別是最近這幾年,得益于數(shù)據(jù)的增多、計(jì)算能力的增強(qiáng)、學(xué)習(xí)算法的成熟以及應(yīng)用場(chǎng)景的豐富,越來(lái)越多的人開(kāi)始關(guān)注這一個(gè) “嶄新”的研究領(lǐng)域:深度學(xué)習(xí)。深度學(xué)習(xí)以神經(jīng)網(wǎng)絡(luò)為主要模型
2020-05-18 08:00:000 都離不開(kāi)人工智能領(lǐng)域研究者們的長(zhǎng)期努力。特別是最近這幾年,得益于數(shù)據(jù)的增多、計(jì)算能力的增強(qiáng)、學(xué)習(xí)算法的成熟以及應(yīng)用場(chǎng)景的豐富,越來(lái)越多的人開(kāi)始關(guān)注這一個(gè)“嶄新”的研究領(lǐng)域:深度學(xué)習(xí)。深度學(xué)習(xí)以神經(jīng)網(wǎng)絡(luò)為主要模型
2020-08-17 08:00:005 基于深度學(xué)習(xí)的人臉識(shí)別算法,如何讓神經(jīng)網(wǎng)絡(luò)從訓(xùn)練數(shù)據(jù)中學(xué)習(xí)到有效、魯棒的生物特征是至關(guān)重要的。
2021-03-12 11:13:242958 
基于深度學(xué)習(xí)的人臉識(shí)別算法,如何讓神經(jīng)網(wǎng)絡(luò)從訓(xùn)練數(shù)據(jù)中學(xué)習(xí)到有效、魯棒的生物特征是至關(guān)重要的。在這個(gè)過(guò)程中,一個(gè)良好的學(xué)習(xí)向?qū)遣豢苫蛉钡摹R虼耍?b class="flag-6" style="color: red">模型訓(xùn)練的過(guò)程中,
2021-03-12 11:17:383877 
深度學(xué)習(xí)是機(jī)器學(xué)習(xí)和人工智能研究的最新趨勢(shì),作為一個(gè)十余年來(lái)快速發(fā)展的嶄新領(lǐng)域,越來(lái)越受到研究者的關(guān)注。卷積神經(jīng)網(wǎng)絡(luò)(CNN)模型是深度學(xué)習(xí)模型中最重要的一種經(jīng)典結(jié)構(gòu),其性能在近年來(lái)深度學(xué)習(xí)任務(wù)
2021-04-02 15:29:0420 深度模型中的優(yōu)化與學(xué)習(xí)課件下載
2021-04-07 16:21:013 近年來(lái),隨著深度學(xué)習(xí)的飛速發(fā)展,深度神經(jīng)網(wǎng)絡(luò)受到了越來(lái)越多的關(guān)注,在許多應(yīng)用領(lǐng)域取得了顯著效果。通常,在較高的計(jì)算量下,深度神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)能力隨著網(wǎng)絡(luò)層深度的増加而不斷提高,因此深度神經(jīng)網(wǎng)絡(luò)在大型
2021-04-12 10:26:5920 短時(shí)強(qiáng)降水、大風(fēng)等強(qiáng)對(duì)流天氣危害巨大,對(duì)其進(jìn)行自動(dòng)識(shí)別存在相當(dāng)大的技術(shù)困難。提出一種基于深度神經(jīng)網(wǎng)絡(luò)的強(qiáng)對(duì)流夭氣智能識(shí)別模型,以雷達(dá)回波圖像和表征回波移動(dòng)路徑的光流圖像作為輸入,通過(guò)神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)
2021-04-16 14:06:4313 作為模型的初始化詞向量。但是,隨機(jī)詞向量存在不具備語(yǔ)乂和語(yǔ)法信息的缺點(diǎn);預(yù)訓(xùn)練詞向量存在¨一詞-乂”的缺點(diǎn),無(wú)法為模型提供具備上下文依賴的詞向量。針對(duì)該問(wèn)題,提岀了一種基于預(yù)訓(xùn)練模型BERT和長(zhǎng)短期記憶網(wǎng)絡(luò)的深度學(xué)習(xí)
2021-04-20 14:29:0619 短時(shí)強(qiáng)降水、大風(fēng)等強(qiáng)對(duì)流夭氣危害巨大,對(duì)其進(jìn)行自動(dòng)識(shí)別存在相當(dāng)大的技術(shù)困難。提岀一種基于深度神經(jīng)網(wǎng)絡(luò)的強(qiáng)對(duì)流夭氣智能識(shí)別模型,以雷達(dá)回波圖像和表征囯波移動(dòng)路徑的光流圖像作為輸λ,通過(guò)神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)
2021-05-08 11:35:2912 基于傳統(tǒng)的淺層學(xué)習(xí)網(wǎng)絡(luò)由于過(guò)度依賴于人工選擇手勢(shì)特征,因此不能實(shí)時(shí)適應(yīng)復(fù)雜多變的自然場(chǎng)景。在卷積神經(jīng)網(wǎng)絡(luò)架構(gòu)的基礎(chǔ)上,提岀了一種改進(jìn)的多尺度深度網(wǎng)絡(luò)手勢(shì)識(shí)別模型,該模型能夠利用卷積層自動(dòng)學(xué)習(xí)手勢(shì)特征
2021-05-29 14:44:108 基于深度學(xué)習(xí)的行為識(shí)別算法及其應(yīng)用
2021-06-16 14:56:3820 動(dòng)作識(shí)別網(wǎng)絡(luò) 深度學(xué)習(xí)在人體動(dòng)作識(shí)別領(lǐng)域有兩類主要的網(wǎng)絡(luò),一類是基于姿態(tài)評(píng)估,基于關(guān)鍵點(diǎn)實(shí)現(xiàn)的動(dòng)作識(shí)別網(wǎng)絡(luò);另外一類是直接預(yù)測(cè)的動(dòng)作識(shí)別網(wǎng)絡(luò)。關(guān)于姿態(tài)評(píng)估相關(guān)的網(wǎng)絡(luò)模型應(yīng)用,我們?cè)谇懊娴奈恼轮幸呀?jīng)
2021-06-25 10:32:072423 
本文大致介紹將深度學(xué)習(xí)算法模型移植到海思AI芯片的總體流程和一些需要注意的細(xì)節(jié)。海思芯片移植深度學(xué)習(xí)算法模型,大致分為模型轉(zhuǎn)換,...
2022-01-26 19:42:3511 基于遷移深度學(xué)習(xí)的雷達(dá)信號(hào)分選識(shí)別 ? 來(lái)源:《軟件學(xué)報(bào)》?,作者王功明等 ? 摘要:? 針對(duì)當(dāng)前雷達(dá)信號(hào)分選識(shí)別算法普遍存在的低信噪比下識(shí)別能力差、特征參數(shù)提取困難、分類器模型參數(shù)復(fù)雜等問(wèn)題,提出
2022-03-02 17:35:02913 與傳統(tǒng)機(jī)器學(xué)習(xí)相比,深度學(xué)習(xí)是從數(shù)據(jù)中學(xué)習(xí),而大模型則是通過(guò)使用大量的模型來(lái)訓(xùn)練數(shù)據(jù)。深度學(xué)習(xí)可以處理任何類型的數(shù)據(jù),例如圖片、文本等等;但是這些數(shù)據(jù)很難用機(jī)器完成。大模型可以訓(xùn)練更多類別、多個(gè)級(jí)別的模型,因此可以處理更廣泛的類型。另外:在使用大模型時(shí),可能需要一個(gè)更全面或復(fù)雜的數(shù)學(xué)和數(shù)值計(jì)算的支持。
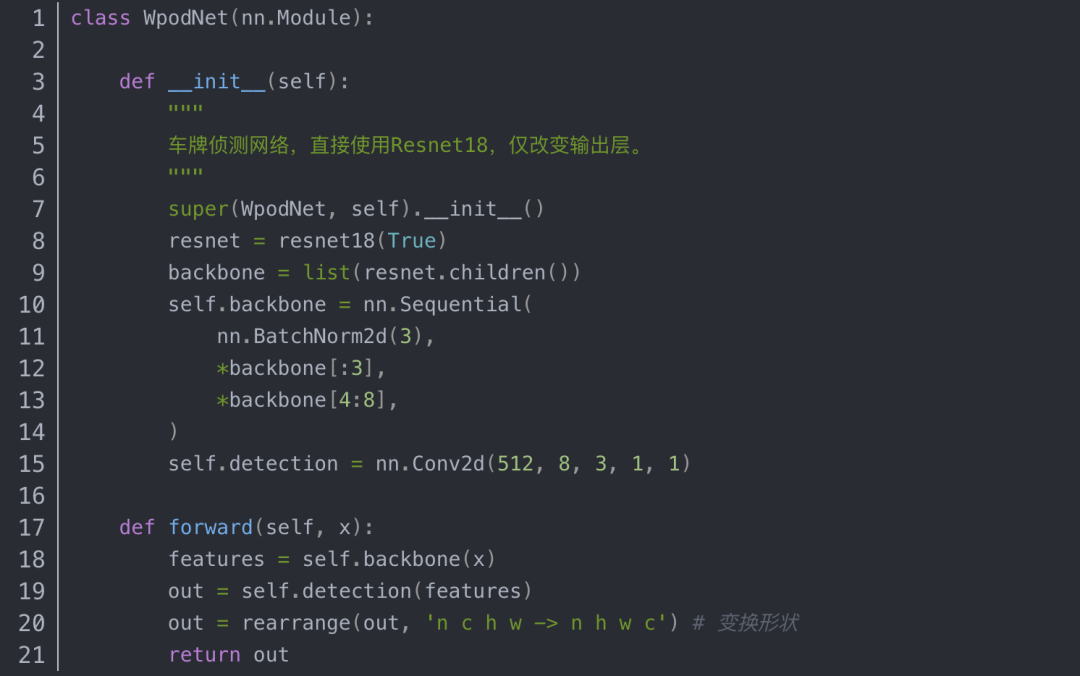
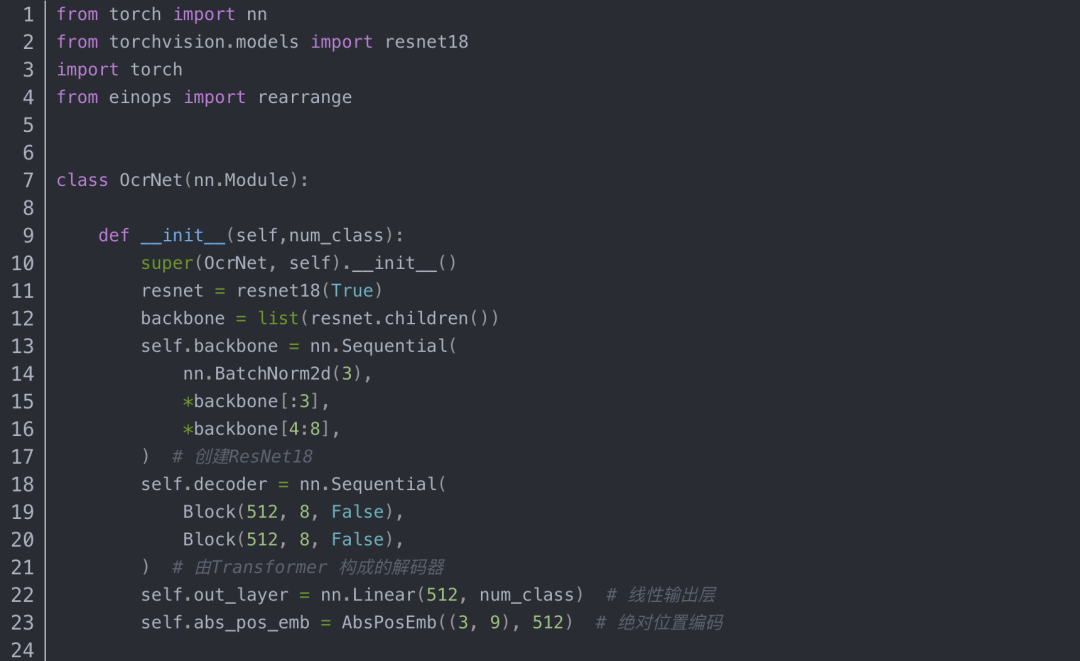
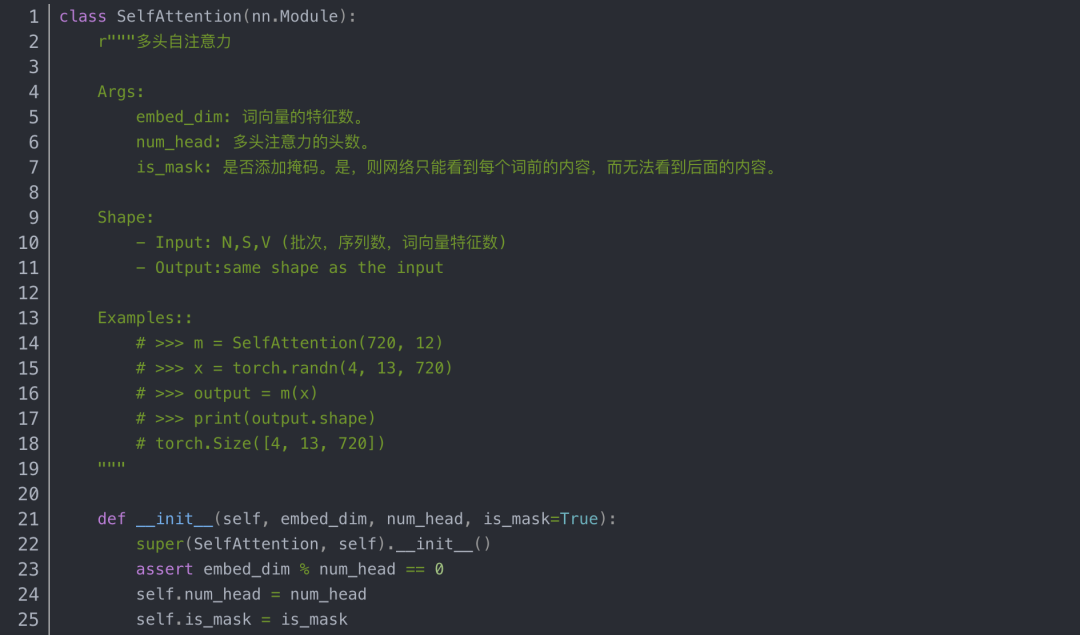
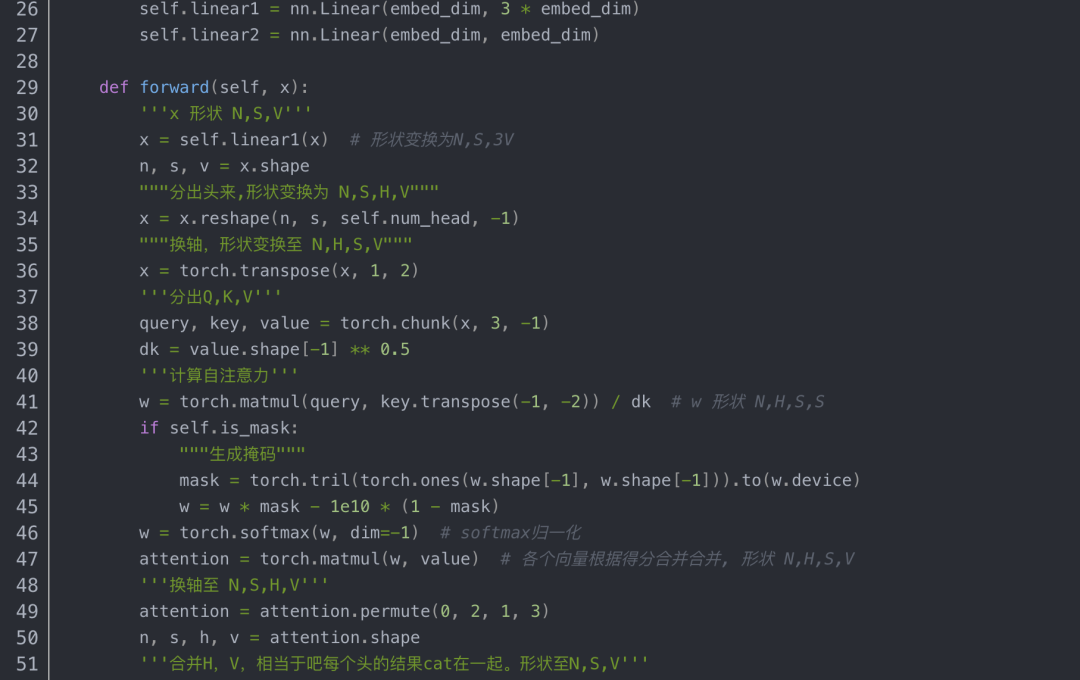
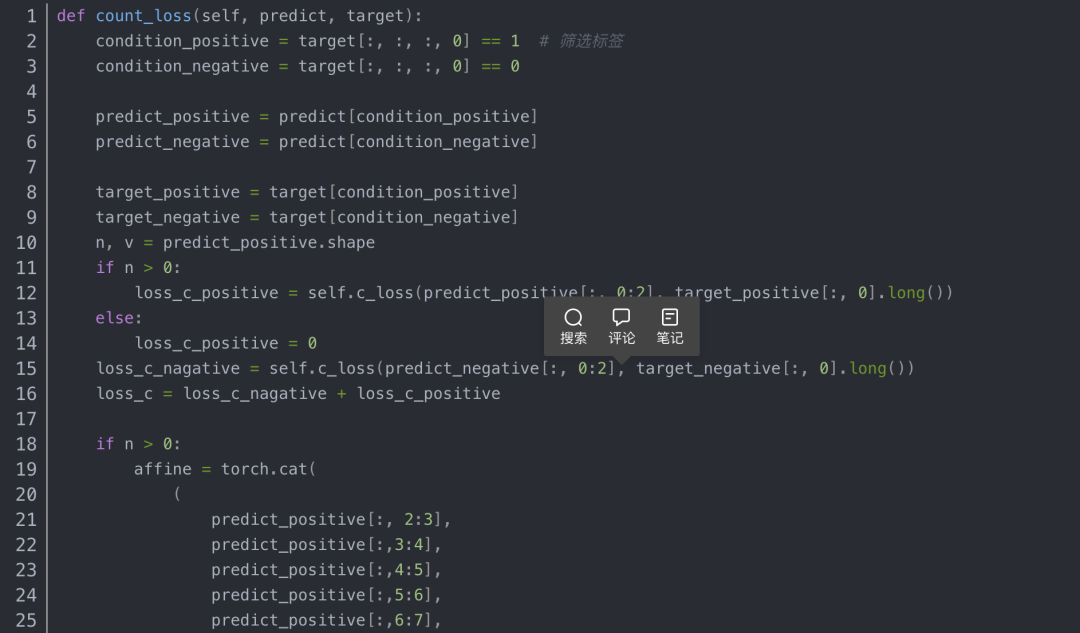
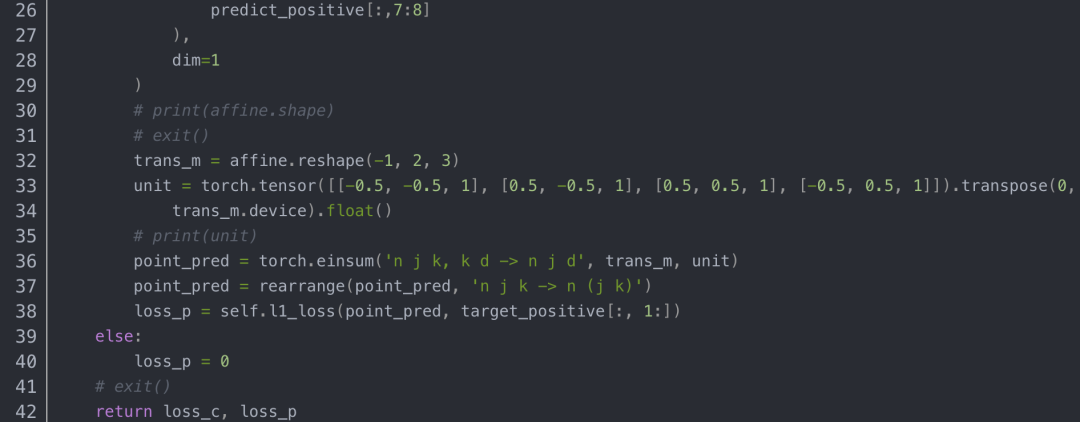
2023-02-16 11:32:371605 基于深度學(xué)習(xí)的車牌識(shí)別,其中,車輛檢測(cè)網(wǎng)絡(luò)直接使用YOLO偵測(cè)。而后,才是使用網(wǎng)絡(luò)偵測(cè)車牌與識(shí)別車牌號(hào)。
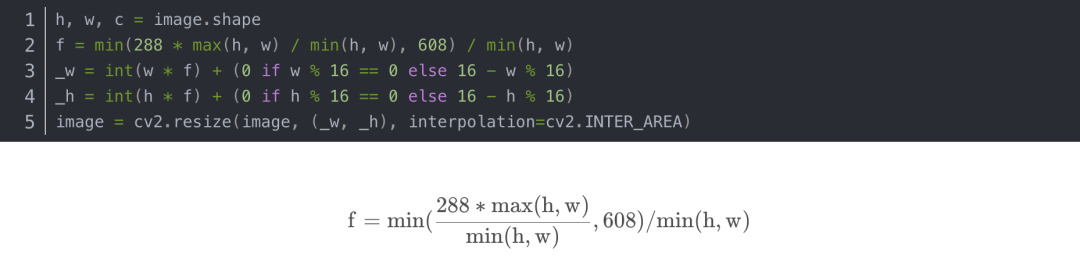
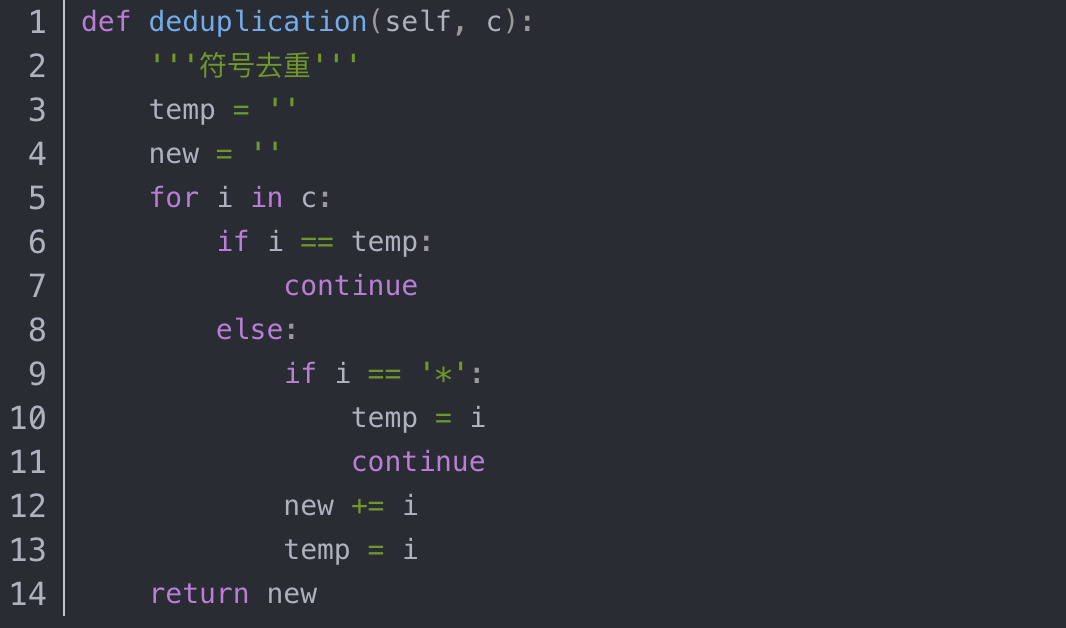
2023-02-19 11:35:571579 摘要:車牌識(shí)別系統(tǒng)在生活中的使用越發(fā)廣泛,占據(jù)重要地位。車牌識(shí)別一共分為圖像處理和字符識(shí)別兩部分。本文首先使用OpenCV技術(shù)定位車牌、分割車牌,接著應(yīng)用Tensorflow識(shí)別車牌字符。每個(gè)
2023-07-20 14:57:390 深度學(xué)習(xí)是什么領(lǐng)域? 深度學(xué)習(xí)是機(jī)器學(xué)習(xí)的一種子集,由多層神經(jīng)網(wǎng)絡(luò)組成。它是一種自動(dòng)學(xué)習(xí)技術(shù),可以從數(shù)據(jù)中學(xué)習(xí)高層次的抽象模型,以進(jìn)行推斷和預(yù)測(cè)。深度學(xué)習(xí)廣泛應(yīng)用于計(jì)算機(jī)視覺(jué)、語(yǔ)音識(shí)別、自然語(yǔ)言處理
2023-08-17 16:02:59995 。 在深度學(xué)習(xí)中,使用了一些快速的算法,比如卷積神經(jīng)網(wǎng)絡(luò)以及深度神經(jīng)網(wǎng)絡(luò),這些算法在大量數(shù)據(jù)處理和圖像識(shí)別上面有著非常重要的作用。 深度學(xué)習(xí)領(lǐng)域的發(fā)展不僅僅是科技上的顛覆,更是對(duì)人類思維模式的挑戰(zhàn)。雖然深度學(xué)習(xí)
2023-08-17 16:03:041305 深度學(xué)習(xí)(Deep Learning)是一種基于人工神經(jīng)網(wǎng)絡(luò)的機(jī)器學(xué)習(xí)算法,其主要特點(diǎn)是模型由多個(gè)隱層組成,可以自動(dòng)地學(xué)習(xí)特征,并進(jìn)行預(yù)測(cè)或分類。該算法在計(jì)算機(jī)視覺(jué)、語(yǔ)音識(shí)別、自然語(yǔ)言處理、推薦系統(tǒng)和數(shù)據(jù)挖掘等領(lǐng)域被廣泛應(yīng)用,成為機(jī)器學(xué)習(xí)領(lǐng)域的一種重要分支。
2023-08-21 18:22:53929 的挑戰(zhàn)。 二、深度學(xué)習(xí)在語(yǔ)音識(shí)別中的應(yīng)用 1.基于深度神經(jīng)網(wǎng)絡(luò)的語(yǔ)音識(shí)別:深度神經(jīng)網(wǎng)絡(luò)(DNN)和循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)是深度學(xué)習(xí)在語(yǔ)音識(shí)別中應(yīng)用的主要技術(shù)。基于這些網(wǎng)絡(luò)的語(yǔ)音識(shí)別系統(tǒng)能夠有效地提高識(shí)別精度和效率,并且被廣
2023-10-10 18:14:53449 基于深度學(xué)習(xí)的情感語(yǔ)音識(shí)別模型的優(yōu)化策略,包括數(shù)據(jù)預(yù)處理、模型結(jié)構(gòu)優(yōu)化、損失函數(shù)改進(jìn)、訓(xùn)練策略調(diào)整以及集成學(xué)習(xí)等方面的內(nèi)容。
2023-11-09 16:34:14227 算法工程、數(shù)據(jù)派THU深度學(xué)習(xí)在近年來(lái)得到了廣泛的應(yīng)用,從圖像識(shí)別、語(yǔ)音識(shí)別到自然語(yǔ)言處理等領(lǐng)域都有了卓越的表現(xiàn)。但是,要訓(xùn)練出一個(gè)高效準(zhǔn)確的深度學(xué)習(xí)模型并不容易。不僅需要有高質(zhì)量的數(shù)據(jù)、合適的模型
2023-12-07 12:38:24547 
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論