傳統獲取深度圖的方法是利用雙目立體視覺獲取視差信息從而得到環境的深度的。而今天大多使用的深度傳感器則是基于結構光傳感器的原理,通過將已知模式的紅外光投影到環境并解算來實現深度的獲取。另一種方法是通過激光雷達來獲取環境精確的深度信息,但缺點是高昂的成本和成像速度。
2018-11-01 09:43:32 7487
7487 幾個傳統的圖像增強算法,并給出matlab實現代碼,看一看不同算法的實現效果,最后再介紹一下深度學習在圖像增強上的應用。 1. 直方圖均衡 在直方圖中,如果灰度級集中于高灰度區域,圖像低灰度就不容易分辨,如果灰度級集中于
2020-11-11 16:28:115133 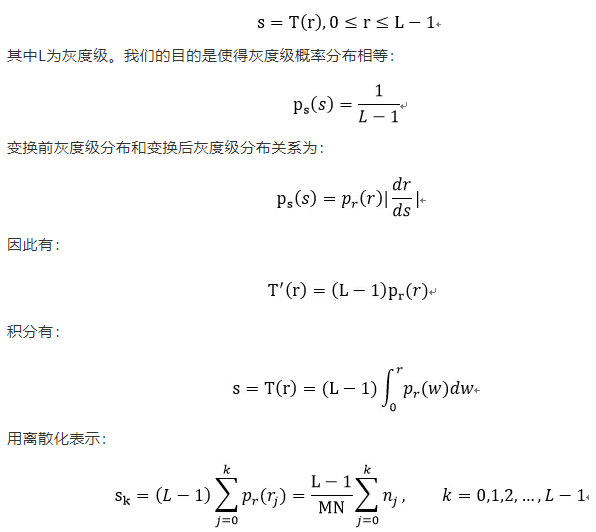
OpenCV能夠處理圖像、視頻、深度圖像等各種類型的視覺數據
2024-01-05 17:32:35677 
各位大哥,誰能幫小弟介紹一些有圖像分割和圖像定位的c語言代碼的資料,萬分感謝。小弟最近在研究圖像方面的東西,可是書上講的大多是理論,具體代碼沒有什么東西,希望能有c++或者c的具體算法代碼,能讓我更深入的學習。
2011-12-16 09:18:54
理器(AP)的算法相結合,最終可提供400萬像素(MP)高性能圖像和相同場景的深度圖。這實現了解讀手勢等功能,以便控制智能物聯網(IoT)設備,以及創建簡單3D模型用于AR/VR。專注于低功耗
2018-10-11 14:09:54
現在用電極芯片測出來人體的阻值,也已知身高,體重,性別,年齡,怎樣根據這些信息來計算出人體成分,這樣的算法是怎樣的,望知道的大神解答一下。
2020-08-20 14:11:44
嗨,我們正在使用連接到一臺電腦的多臺D415相機,通常工作正常。最近我們發現幾個傳感器收集不正確的深度圖不規則,在過去3個月大約10次。看到這個圖像集。如您所見,彩色圖像是正確的。但由于不明原因
2018-11-19 14:19:13
我從英特爾 - RealSense-D400系列 - 數據表.pdf第94頁的圖紙中推測,深度傳感器的中心距攝像機右側(USB側)37.5毫米:根據經驗,我推斷深度圖焦點X在相機的臉后面約32mm
2018-12-05 10:52:34
工作的基礎上,就虹膜成像、虹膜區域定位、等關鍵術進行了討論,給出了一些相關的改進及微積分算法,實現了一套基于虹膜識別的定位系統。實驗結果驗證了工作的有效性。虹膜定位是虹膜識別的重要步驟,因而精確而快速地進行虹膜
2013-07-12 18:55:05
stm32的人體紅外傳感器怎么使用?
2021-11-26 06:13:39
什么是ECG信號的預處理算法和R波定位算法?
2021-11-22 07:02:07
HC-SR501探頭人體紅外感應模塊以熱釋電傳感器,BISS0001芯片為主的人體紅外感應模塊。可以感應到靜止的人嗎?
2017-04-18 16:55:44
LM358的封裝形式有哪幾種?基于LM358的人體感應燈電路設計方案
2021-04-14 06:34:52
` 本帖最后由 弓雖強008 于 2015-5-23 12:03 編輯
可控硅設計的人體感應開關,如想制作的燒友們!可到www.dzjs008.com下載相關制作資料!更多電子制作資料(原理圖+PCB+程序+相關電子資料)請到www.dzjs008.com下載`
2015-03-16 21:09:53
關鍵詞:圖像檢索;深度學習;哈希算法;
2019-04-01 16:12:24
環境:widows10+keil5+C+AT89C52參考資料1.基于單片機的便攜式人體健康指標檢測系統設計,匯編實現2.基于單片機控制的人體健康監測系統設計,匯編...
2021-07-19 07:58:20
這是一個基于熱釋人體紅外傳感的人體定位的上位機程序,現在還處于初步階段,有很多地方還有待完善。這是我的第一個上位機程序,謹此發帖以表紀念。
2013-01-20 10:27:23
嗨,大家好,我試圖從深度圖像中找到幾個中心像素。我正在嘗試實現分割,我需要找到分割對象的距離。這就是我的想法,這將是有效的。當彩色圖像用于分割時,全幀深度圖像將用于找到距離。在我的下面的代碼中。我
2018-11-19 14:19:48
我從realsense查看器中獲取d435深度相機的數據,當我保存深度圖像的快照時,我在規格中得到8位(1-256)灰度圖像,據說相機給出了16位深度圖片。你知道我怎么能得到16位圖像?以上
2018-11-27 14:11:37
如何利用STM32實現紅外收發機制的人體感應設計?
2021-11-18 07:50:35
同一目標的多個圖像,彼此之間相隔一定距離,根據幾何結構計算深度圖。就像人眼一樣,會在空間中給每個相機一個參考點,這些點相互獨立,因此如果在兩個相機之間能夠對應還原這些點的坐標,系統就能夠計算這些點的位置
2020-08-25 11:05:19
1.機器人視覺機器人研究的核心就是:導航定位、路徑規劃、避障、多傳感器融合。定位技術有幾種,不關心,只關心視覺的。視覺技術用到“眼睛”可以分為:單目,雙目,多目、RGB-D,后三種可以使圖像有深度
2019-06-08 08:30:00
機器視覺中的二維圖像模式定位系統算法整體流程圖如圖1所示,由RBF網絡模式訓練和模式定位兩個部分組成。徑向基函數(RBF,Radial basis funcTIon) RBF網絡為兩層MLP
2019-07-08 08:00:00
、傻瓜式示教編程,可實現零基礎數控編程3、加工軌跡優化算法,加工更流暢,加工時間更短4、觸摸/按鍵同時支持,操作簡單可靠5、網絡接口,實現物聯網,便于設備通信與監控四元數致力于運動控制、圖像與視覺傳感
2021-08-13 09:56:19
目前芯海的人體成分算法有四種使用方式1. 秤端2. APP端3. 服務器端4. CSM37F58端
2020-03-06 12:49:12
國國立衛(PC817)生研究院(NIH)提供資金。 該計劃旨在加速新藥開發的速度和效率,并在該領域提供快速檢測不明物質毒性的方法。 10種可互換的人體組織模塊將安裝在芯片上,通過準確預測藥物
2012-08-07 17:11:09
嗨,我可以從intel realsense viewer中獲取彩色圖像和深度。但有三個問題:首先,.bag文件包含彩色圖像和深度圖像,但它們的數字不匹配。為什么?第二,我想將深度圖像轉換
2018-10-31 12:56:23
本文提出了一種基于自適應邊緣提取的人眼定位算法。首先通過高斯平滑濾波對原始圖像進行預處理,然后利用Robert 算子進行邊緣提取,并且以邊緣像素點的總數與圖像像素點的
2009-07-16 09:21:30 19
19 針對當前圖像中文本定位算法普遍存在定位文本精確度不高的缺點,本文提出了一種有效的圖像文本定位方法(MSITE)。算法使用均值漂移方法對圖像進行分割后,用區域生長的方法
2009-12-07 11:43:5713 本文提出了一種基于眼睛圖像均衡化的基礎上的新型虹膜圖像預處理算法。此算法對虹膜圖像進行了精確的定位,使定位后的虹膜圖像具有旋轉、平移和尺度的不變性。在完全相
2010-01-13 14:38:4921 一幅彩色圖像中的人臉被分割出來后,便可檢測出圖像中的人頭數,并可根據此圖像中的人頭數進行智能控制如控制教室中電燈、風扇和空調或判斷汽車是否超載等。此文首先使
2010-01-15 11:53:307 針對人體內特殊環境,提出了TDoA 無線定位技術用以實現人體內膠囊的無線定位。建立了TDoA 的定位模型,主要研究了TDoA 的一種三維算法實現,并獨創性地在Matlab 中實現了相應的算
2010-01-18 13:54:4832 基于計算機圖像序列的人體步態參數的快速獲取方法
傳統的基于圖像序列的人體步態分析往往采用復雜的數學模型,使得分析不能快速實現。摒棄了
2009-12-08 14:56:52832 
本內容提供了復雜背景圖像中的車牌定位算法
2011-05-19 10:50:1747 布谷鳥搜索算法優化特征和分類器參數的人體行為識別_馬偉
2017-01-07 18:39:170 基于計算機圖像序列的人體步態參數的快速獲取方法
2017-02-08 00:53:0912 一種實用的人體接近探測器電路
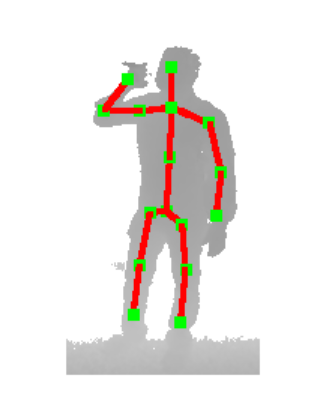
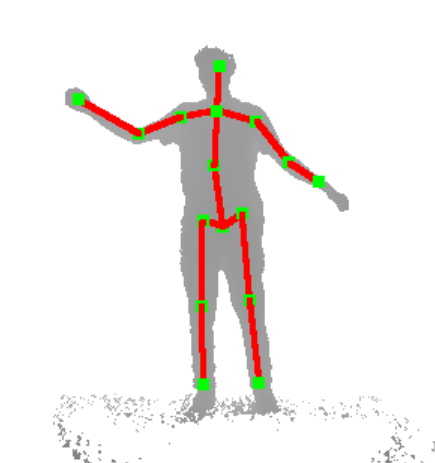
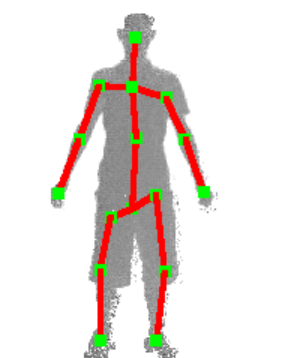
2017-01-22 13:20:2510 在繼《基于Dragonboard 410c的kinect應用系列之三——獲取深度圖》之后,今天我們來獲取下人體的骨骼圖。
2017-02-21 10:29:032921 上篇文章我們介紹了SimpleOpenNI開發平臺搭建,今天小編繼續為大家講解用kinect繪制深度圖與繪制人體軀干實例具體操作過程!
2017-02-21 10:43:211225 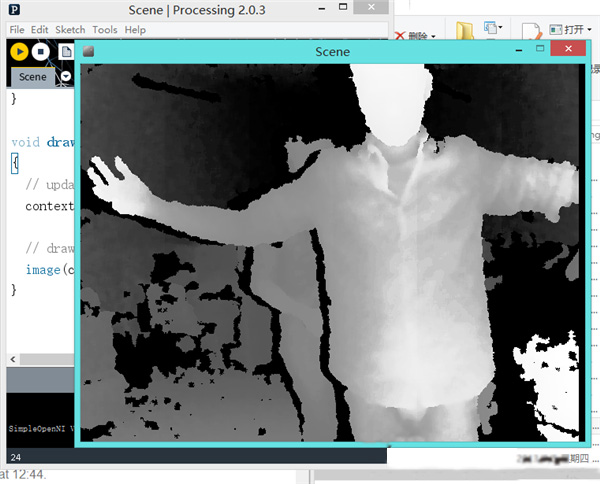
基于矩形骨架的人體動作識別_錢鋒
2017-03-16 08:00:001 一種語義相似度學習的人臉圖像超分辨率算法_謝滿軍
2017-03-19 11:45:571 改進PSO優化神經網絡算法的人體姿態識別_何佳佳
2017-03-19 11:41:391 針對單區域跟蹤快速運動人體易產生漂移的缺點,本文提出一種基于KalmanFilter預測的多區域跟蹤的新算法。該算法利用KalmanFilter預測人體各區域,然后利用顏色直方圖匹配算法精確定位人體各區域,最后加權計算人體最終位置。
2017-09-08 15:13:054 本文檔內容介紹了基于深度圖像重建Matlab代碼,供網友參考。
2017-09-15 10:03:3320 人體骨架提取及關節點定位是人體動作識別中的重要問題。本文針對人體骨架提取過程中基于長度約束易將骨架主體誤判為毛刺的問題,提出了基于斜率約束的人體骨架提取方法。針對關節點定位采用傳統鏈碼遍歷結構適用性
2017-11-02 11:32:590 當前隨著3D相機在智能機器人領域的廣泛運用,越來越多的學者投入到了基于3D相機深度圖像的室內三維平面分割研究當中。文運用了一種快速而且比較穩定的方法去檢測復雜的平面,其中深度圖像是運用Kinect
2017-11-16 10:10:124 提出了一種基于圖元方向變形的人體模型生成算法。通過圖元截線點以及圖元方向變形的方式獲得了不同部位的人體圖元,從而很好地避免了模擬函數所產生的誤差。同時,利用圖元網格生成與平滑連接相結合的方式生成
2017-11-17 15:19:501 深度圖像受其測距原理所限,存在邊緣不匹配、無效像素、噪聲等問題,提出一種基于改進的各向異性擴散算法的深度圖像增強方法。首先,校正深度圖像和彩色圖像的位置關系,并根據時間連續性選擇多幀圖像,進行
2017-11-25 11:08:469 處理。隨著圖像技術與硬件的發展,利用微軟Kinect或華碩Xtion等設備,學者可以實時獲取人體的深度圖像信息。與傳統的圖像相比,深度圖像不受光照影響,能夠提供三維空間信息。利用深度圖像,學者們對行為識別做了許多研究,本文
2017-12-09 11:47:510 針對復雜環境下的深度圖像手勢特征提取信息冗余量大、編碼不穩定等問題,提出了一種改進的基于曲率局部二值模式( LBP)的深度圖像手勢特征提取算法。該算法首先通過坐標轉換將分割出的手勢深度數據轉換
2017-12-11 16:21:064 空間.針對這些問題,本文提出了基于深度反卷積神經網絡的圖像超分辨率算法,該算法利用反卷積層對低分辨率圖像進行上采樣處理,再經深度映射消除由反卷積層造成的噪聲和偽影現象,使用殘差學習降低網絡復雜度,同時避免了因網
2017-12-15 10:41:082 針對分布式多視點加深度格式( DMVD)的視頻編碼中深度圖視頻解碼質量問題,提出一種結合予帶層及子帶系數的小波域分布式深度視頻非均勻量化方案,通過給邊緣分配更多比特來提升深度圖的邊緣質量。結合深度圖
2017-12-20 16:34:001 針對傳統的彩色視頻中動作識別算法成本高,且二維信息不足導致動作識別效果不佳的問題,提出一種新的基于三維深度圖像序列的動作識別方法。該算法在時間維度上提出了時間深度模型(TDM)來描述動作。在三個正交
2017-12-25 14:34:521 針對應用在機器人三維(3D)場景感知測量中,Kinect深度圖的聯合雙邊濾波(JBF)存在降低原始場景深度信息精確度的制約性問題,提出一種新的預處理算法。首先,通過構建深度圖的測量和采樣模型,得到
2017-12-25 16:58:020 針對立體視覺深度圖特征提取精確度低、復雜度高的問題,提出了一種基于主成分分析方向深度梯度直方圖( PCA-HODG)的特征提取算法。首先,對雙目立體視覺圖像進行視差計算和深度圖提取,獲取高質量深度圖
2017-12-26 14:32:070 提出一種基于局部姿態先驗的從深度圖像中實時在線捕獲3D人體運動的方法,關鍵思路是根據從捕獲的深度圖像中自動提取具有語義信息的虛擬稀疏3D標記點,從事先建立的異構3D人體姿態數據庫中快速檢索K個姿態
2018-01-03 14:33:440 針對圖像修復結果中存在物體結構上的不連續性和不完整性的問題,提出一種基于深度信息的圖像修復算法。首先,通過建立平面參數馬爾可夫模型來推測圖像中像素點所在場景空間中的深度信息,從而劃分出圖像中的共面
2018-01-03 14:49:050 為解決使用RGB圖像進行特征提取時容易受外界因素干擾,且計算復雜度高等問題,采用一種更加有效的解決方案,即使用深度數據進行人體動作識別。利用Kinect采集的關節點數據,首先將人體關節劃分成五個區域
2018-03-29 11:16:461 雙目匹配需要把左圖像素和右圖中其對應像素進行匹配,再由匹配的像素差算出左圖像素對應的深度,而之前的單目深度估計方法均不能顯式引入類似的幾何約束。由于深度學習模型的引入,雙目匹配算法的性能近年來得到了極大的提升。
2018-06-04 15:46:4934042 
該深度圖像傳感器可在黑暗中拍攝250米遠,10厘米物體的圖像。為了測距,該傳感器采用了ToF(飛行時間)法,可發射紅外光并基于反射光返回時間計算物體距離。
2018-08-20 10:45:044793 深度卷積網絡因其能夠從大量圖像數據集中學習而獲得成功。 Dmitry Ulyanov的論文“Deep Image Prior”表明,為了解決像圖像恢復這樣的逆問題,網絡的結構已經足夠,并且足以從劣質
2019-02-18 16:38:534532 傳統的人體關鍵點檢測技術往往以 2D 的人體骨骼關節點檢測形式出現,即通過技術預測 RGB 圖像中人體的十幾個關節點的坐標,一方面結果非常稀疏,將人體大為簡化成骨骼的形式,另一方面結果往往只包含二維平面上的坐標預測,不能還原深度信息,因此無法體現縱深的感覺。
2019-03-21 09:25:392704 
針對多視點加深度格式的3D視頻中深度圖魯棒性不足的問題,提出了一種基于深度圖的3D魯棒視頻水印算法。首先,將深度圖不重疊的劃分為4x4大小的塊,計算每一塊像素域的均方差,并設置一個閡值來區分紋理
2019-04-04 14:54:344 算法從視差深度圖像和測距法計算一個點云,并將其添加到無人機占用空間的地圖表示中。
2019-07-09 17:16:161754 多孔卷積結構,將原始圖像中的空間信息與提取到的底層圖像特征相互融合,得到初始深度圖;最后,將初始深度圖送入條件隨機場(CRF),聯合圖像的像素空間位置、灰度及其梯度信息對所得深度圖進行優化處理,得到最終深度圖。在客觀數
2019-10-30 14:58:3610 麻省理工學院的研究人員揭示了通過新型激光超聲成像技術生成的人體組織的第一批圖像。與傳統超聲不同,新技術不需要與人體皮膚接觸,從而極大地擴大了臨床環境中醫生的使用范圍
2019-12-23 15:37:224191 當我們通過攝像頭得到深度圖后,下一步就是把深度圖輸入給算法,算法可以輸出我們手部所有關鍵點的 3D 位置。
2020-03-25 09:47:222995 針對利用深度學習的服裝圖像檢索算法分類精度較低的問題,提出基于深度卷積神經網絡的改進服裝圖像分類檢索算法,并建立一個具有16種屬性、10萬量級的網絡服裝圖像數據庫B_DATClothing。依據服裝
2020-08-27 10:09:006 多孔卷積結構,將原始圖像中的空間信息與提取到的底層圖像特征相互融合,得到初始深度圖;最后,將初始深度圖送入條件隨機場(CRF),聯合圖像的像素空間位置、灰度及其梯度信息對所得深度圖進行優化處理,得到最終深度圖。在客觀數
2020-09-29 16:20:005 圖像應用算法并輸出類別和相應的定位(YOLO系列) 1YOLO算法的提出 在圖像的識別與定位中,輸入一張圖片,要求輸出其中所包含的對象,以及每個對象的位置(包含該對象的矩形框)。 對象的識別和定位,可以看成兩個任務:找到圖片中某個存在對象的區域,然后識別出該區域中
2020-11-27 10:15:563195 技術和算法的開發和精進讓AI換臉、AI克隆都成了可實現的事情。近日,上海科技大學團隊的一項新研究,再一擴展了這一領域,其開發建立了人體圖像合成——人體圖像合成的目的是制作可信和逼真的人類圖像,包括
2020-12-14 11:17:393177 圖像匹配 應用: 目標識別、目標跟蹤、超分辨率影像重建、視覺導航、圖像拼接、三維重建、視覺定位、場景深度計算 方法: 基于深度學習的特征點匹配算法、實時匹配算法、3維點云匹配算法、共面線點不變量匹配
2020-12-26 11:08:576447 基于深度學習的人臉識別算法,如何讓神經網絡從訓練數據中學習到有效、魯棒的生物特征是至關重要的。
2021-03-12 11:13:242958 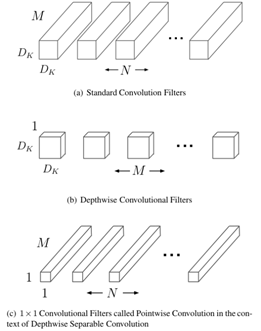
基于深度學習的人臉識別算法,如何讓神經網絡從訓練數據中學習到有效、魯棒的生物特征是至關重要的。在這個過程中,一個良好的學習向導是不可或缺的。因此,在模型訓練的過程中,
2021-03-12 11:17:383877 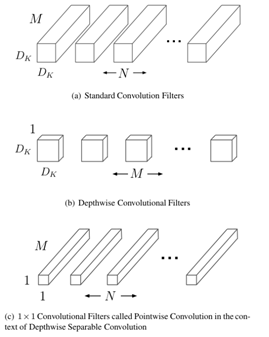
今天,我們將深入探討深度圖像修復的一個突破,上下文注意力。通過使用上下文注意力,我們可以有效地從遙遠的空間位置借用信息來重建局部缺失的像素。這個想法實際上或多或少和上一篇的復制-粘貼是一樣的。
2021-04-07 19:01:042537 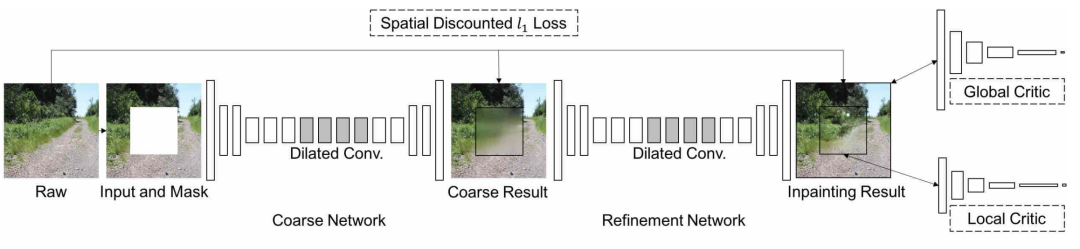
為探究沙療過程中沙體溫度及血液灌注率對于人體膝關節部位溫度場分布以及骨骼熱應力的影響,在生物傳熱學以及經典力學的理論基礎上,通過運用將膝關節部位的計算機斷層掃描Ited tomography,CT
2021-04-15 14:11:374 在基于立體視覺的人體建模系統中,背景像素的移除可以減少不必要的立體匹配計算,提高人體模型重建效率。為此,在給定大量具有前景 Alpha蒙板真值的人體圖像作為訓練數據的前提下,提出了一個端到端的深度
2021-04-21 15:29:3610 ,更能充分地提取圖像信息,獲取更具有魯棒性的特征,因此基于深度學習的方法已成為二維人體姿態估計算法研究的主流方向。然而,深度學習尚在發展中,仍存在訓練規模大等問題,研究者們主要從設絡以及訓練方式入手對人體姿態
2021-04-27 16:16:077 為提升人體姿態估計在移動終端設備上的運行速度與實時性,提出一種改進的人體關鍵點檢測算法。通過將 Mobilenetv2輕量級主干網絡與深度可分離卷積模塊相結合加速特征提取過程,使用精煉網絡進行多尺度人體
2021-05-14 11:26:134 ./oschina_soft/gitee-HumanDetectionUsingDepth.zip
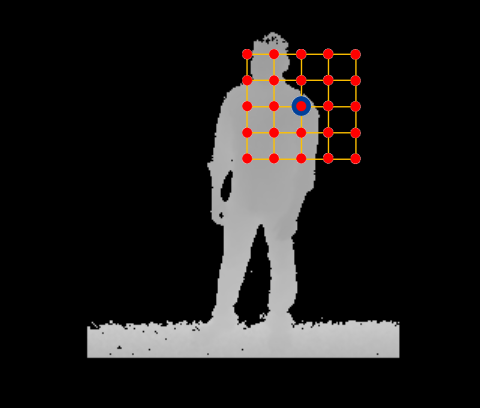
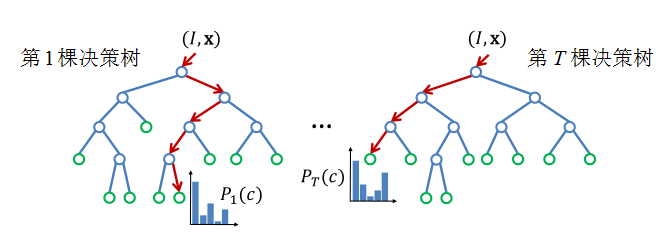
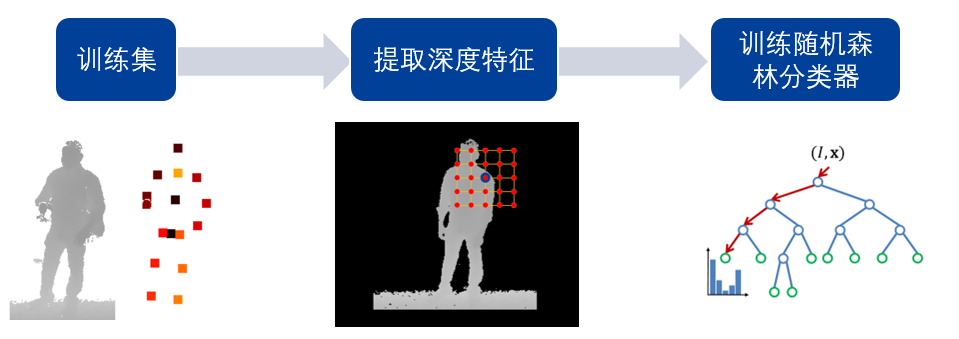
2022-06-15 09:23:350 本文中采用如圖1所示的局域深度采樣特征。其中藍色點表示圖像I中給定的像素x,以該像素為中心生成一個5*5的格點矩陣,紅色的格點表示要進行深度采樣的點。
2022-07-15 10:05:41930 當前,絕大部分基于深度學習的圖像去模糊算法是不區分場景的,也就是他們是對常見的自然與人為設計的場景進行去模糊。但是,在現實生活中,經常會遇到一些特定場景的圖像去模糊。比如人臉去模糊、文本去模糊、雙目去模糊。本文總結了這些不同場景的特點,以及各自的深度去模糊算法。
2022-10-28 16:00:201740 在低紋理區域,傳統的基于特征點的SfM/SLAM/三維重建算法很容易失敗。因此很多算法會嘗試去提取線特征來提高點特征的魯棒性,典型操作就是LSD。
2023-01-08 14:29:35847 Sobel算子是一種基于圖像梯度的邊緣檢測算法,可以在x方向和y方向上計算圖像的梯度,然后將兩個梯度值合并成一個邊緣強度值。
2023-02-24 17:56:491127 人體識別圖像技術是一種通過分析人體圖像(如照片或視頻)來識別個體身份的技術。它主要基于人體特征(如膚色、體型等)進行分析,通過對人體姿態、步態、外觀等因素的提取與建模,實現人體身份的識別。 人體識別
2023-05-25 14:57:39921 人體分割識別圖像技術是一種將人體從圖像中分割出來,并對人體進行識別和特征提取的技術。該技術主要利用計算機視覺和圖像處理算法對人體圖像進行預處理、分割、特征提取和識別等操作,以實現自動化的身份認證
2023-06-15 17:44:49635 人體分割識別圖像技術在實現過程中面臨著一些挑戰和問題。 首先,人體分割識別圖像技術需要處理復雜的人體圖像,而這些圖像往往存在著多種干擾因素,如光照、姿態、遮擋等,如何消除這些干擾因素的影響是人體分割
2023-06-15 18:04:16361 當前,生成式人工智能(AI)技術的快速發展令人矚目。它能夠理解人類的描述,并在短時間內生成逼真的圖像和視頻。在生成式AI的應用中,圖像深度信息具有重要的價值,準確的深度圖像深度信息可以使生成的圖像
2023-06-21 09:06:42279 ? 今天介紹一下深度圖像的獲取方法主要有哪些,以及這些方法會導致深度圖像中存在什么樣的問題。 在計算機視覺系統中,三維場景信息為圖像分割、目標檢測、物體跟蹤等各類計算機視覺應用提供了更多的可能性
2023-06-25 16:26:36655 
。深度學習算法作為其中的重要組成部分,不僅可以為諸如人工智能、圖像識別以及自然語言處理等領域提供支持,同時也受到了越來越多的關注和研究。在本文中,我們將著重介紹深度學習算法,包括其是什么和有哪些種類。 一、什么是
2023-08-17 16:02:566010 。 在深度學習中,使用了一些快速的算法,比如卷積神經網絡以及深度神經網絡,這些算法在大量數據處理和圖像識別上面有著非常重要的作用。 深度學習領域的發展不僅僅是科技上的顛覆,更是對人類思維模式的挑戰。雖然深度學習
2023-08-17 16:03:041305
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論