。鑒于此種情況,本文采用了神經(jīng)模糊控制方法,對(duì)SAW壓力傳感器進(jìn)行智能溫度補(bǔ)償。 神經(jīng)模糊控制是一種用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)的模糊控制的方法。在形式結(jié)構(gòu)上是用多點(diǎn)網(wǎng)絡(luò)實(shí)現(xiàn)的模糊映射。而神經(jīng)網(wǎng)絡(luò)的非線性和可訓(xùn)練性
2018-10-24 11:36:52
神經(jīng)網(wǎng)絡(luò)50例
2012-11-28 16:49:56
神經(jīng)網(wǎng)絡(luò)Matlab程序
2009-09-15 12:52:24
神經(jīng)網(wǎng)絡(luò)基本介紹
2018-01-04 13:41:23
第1章 概述 1.1 人工神經(jīng)網(wǎng)絡(luò)研究與發(fā)展 1.2 生物神經(jīng)元 1.3 人工神經(jīng)網(wǎng)絡(luò)的構(gòu)成 第2章人工神經(jīng)網(wǎng)絡(luò)基本模型 2.1 MP模型 2.2 感知器模型 2.3 自適應(yīng)線性
2012-03-20 11:32:43
將神經(jīng)網(wǎng)絡(luò)移植到STM32最近在做的一個(gè)項(xiàng)目需要用到網(wǎng)絡(luò)進(jìn)行擬合,并且將擬合得到的結(jié)果用作控制,就在想能不能直接在單片機(jī)上做神經(jīng)網(wǎng)絡(luò)計(jì)算,這樣就可以實(shí)時(shí)計(jì)算,不依賴于上位機(jī)。所以要解決的主要是兩個(gè)
2022-01-11 06:20:53
神經(jīng)網(wǎng)絡(luò)簡介
2012-08-05 21:01:08
基于深度學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)算法
2019-05-16 17:25:05
本文介紹了用于渦輪槳距角控制的永磁同步發(fā)電機(jī)(PMSG)和高性能在線訓(xùn)練遞歸神經(jīng)網(wǎng)絡(luò)(RNN)的混合模糊滑模損失最小化控制的設(shè)計(jì)。反向傳播學(xué)習(xí)算法用于調(diào)節(jié)RNN控制器。PMSG速度使用低于額定速度
2021-07-12 06:46:57
遞歸神經(jīng)網(wǎng)絡(luò)(RNN)RNN是最強(qiáng)大的模型之一,它使我們能夠開發(fā)如分類、序列數(shù)據(jù)標(biāo)注、生成文本序列(例如預(yù)測(cè)下一輸入詞的SwiftKey keyboard應(yīng)用程序),以及將一個(gè)序列轉(zhuǎn)換為另一個(gè)序列
2022-07-20 09:27:59
在一起,計(jì)算機(jī)就會(huì)判定這是一只貓! C、遞歸神經(jīng)網(wǎng)絡(luò)遞歸神經(jīng)網(wǎng)絡(luò)是一種深度神經(jīng)網(wǎng)絡(luò),它將相同的權(quán)重遞歸地應(yīng)用在神經(jīng)網(wǎng)絡(luò)架構(gòu)上,以拓?fù)渑判虻姆绞奖闅v給定結(jié)構(gòu),從而在大小可變的輸入結(jié)構(gòu)上可以做出結(jié)構(gòu)化的預(yù)測(cè)
2018-06-05 10:11:50
FPGA加速的關(guān)鍵因素是什么?EdgeBoard中神經(jīng)網(wǎng)絡(luò)算子在FPGA中的實(shí)現(xiàn)方法是什么?
2021-09-28 06:37:44
MATLAB神經(jīng)網(wǎng)絡(luò)
2013-07-08 15:17:13
遞歸網(wǎng)絡(luò)newelm 創(chuàng)建一Elman遞歸網(wǎng)絡(luò)2. 網(wǎng)絡(luò)應(yīng)用函數(shù)sim 仿真一個(gè)神經(jīng)網(wǎng)絡(luò)init 初始化一個(gè)神經(jīng)網(wǎng)絡(luò)adapt 神經(jīng)網(wǎng)絡(luò)的自適應(yīng)化train 訓(xùn)練一個(gè)神經(jīng)網(wǎng)絡(luò)3. 權(quán)函數(shù)dotprod
2009-09-22 16:10:08
請(qǐng)問:我在用labview做BP神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)故障診斷,在NI官網(wǎng)找到了機(jī)器學(xué)習(xí)工具包(MLT),但是里面沒有關(guān)于這部分VI的幫助文檔,對(duì)于”BP神經(jīng)網(wǎng)絡(luò)分類“這個(gè)范例有很多不懂的地方,比如
2017-02-22 16:08:08
習(xí)神經(jīng)神經(jīng)網(wǎng)絡(luò),對(duì)于神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)是如何一直沒有具體實(shí)現(xiàn)一下:現(xiàn)看到一個(gè)簡單的神經(jīng)網(wǎng)絡(luò)模型用于訓(xùn)練的輸入數(shù)據(jù):對(duì)應(yīng)的輸出數(shù)據(jù):我們這里設(shè)置:1:節(jié)點(diǎn)個(gè)數(shù)設(shè)置:輸入層、隱層、輸出層的節(jié)點(diǎn)
2021-08-18 07:25:21
原文鏈接:http://tecdat.cn/?p=6585本文介紹了用于渦輪槳距角控制的永磁同步發(fā)電機(jī)(PMSG)和高性能在線訓(xùn)練遞歸神經(jīng)網(wǎng)絡(luò)(RNN)的混合模糊滑模損失最小化控制的設(shè)計(jì)。反向傳播學(xué)
2021-07-12 07:55:17
python語言,可以很輕松地實(shí)現(xiàn)復(fù)雜的數(shù)學(xué)運(yùn)算,降低編程難度。下一篇文章,將通過具體代碼,演示基于神經(jīng)網(wǎng)絡(luò)的手寫圖形識(shí)別。
2019-03-03 22:10:19
上的USB攝像頭作為主要傳感器,采集得到的前方道路圖像經(jīng)過數(shù)據(jù)預(yù)處理后,接入神經(jīng)網(wǎng)絡(luò)的輸入層,由神經(jīng)網(wǎng)絡(luò)的輸出層狀態(tài)將生成控制信號(hào),控制小車的直走、左轉(zhuǎn)、右轉(zhuǎn)、與停止。交通標(biāo)識(shí)識(shí)別功能同樣使用USB
2019-03-02 23:10:52
今天學(xué)習(xí)了兩個(gè)神經(jīng)網(wǎng)絡(luò),分別是自適應(yīng)諧振(ART)神經(jīng)網(wǎng)絡(luò)與自組織映射(SOM)神經(jīng)網(wǎng)絡(luò)。整體感覺不是很難,只不過一些最基礎(chǔ)的概念容易理解不清。首先ART神經(jīng)網(wǎng)絡(luò)是競(jìng)爭(zhēng)學(xué)習(xí)的一個(gè)代表,競(jìng)爭(zhēng)型學(xué)習(xí)
2019-07-21 04:30:00
`BP神經(jīng)網(wǎng)絡(luò)首先給出只包含一個(gè)隱層的BP神經(jīng)網(wǎng)絡(luò)模型(兩層神經(jīng)網(wǎng)絡(luò)): BP神經(jīng)網(wǎng)絡(luò)其實(shí)由兩部分組成:前饋神經(jīng)網(wǎng)絡(luò):神經(jīng)網(wǎng)絡(luò)是前饋的,其權(quán)重都不回送到輸入單元,或前一層輸出單元(數(shù)據(jù)信息是單向
2019-07-21 04:00:00
人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network,ANN)是一種類似生物神經(jīng)網(wǎng)絡(luò)的信息處理結(jié)構(gòu),它的提出是為了解決一些非線性,非平穩(wěn),復(fù)雜的實(shí)際問題。那有哪些辦法能實(shí)現(xiàn)人工神經(jīng)網(wǎng)絡(luò)呢?
2019-08-01 08:06:21
人工神經(jīng)網(wǎng)絡(luò)是根據(jù)人的認(rèn)識(shí)過程而開發(fā)出的一種算法。假如我們現(xiàn)在只有一些輸入和相應(yīng)的輸出,而對(duì)如何由輸入得到輸出的機(jī)理并不清楚,那么我們可以把輸入與輸出之間的未知過程看成是一個(gè)“網(wǎng)絡(luò)”,通過不斷地給
2008-06-19 14:40:42
人工神經(jīng)網(wǎng)絡(luò)在傳感器數(shù)據(jù)融合中的應(yīng)用針對(duì)壓力傳感器對(duì)溫度的交叉靈敏度,采用BP 人工神經(jīng)網(wǎng)絡(luò)法對(duì)其進(jìn)行數(shù)據(jù)融合處理,消除溫度對(duì)壓力傳感器的影響,大大提高了傳感器的穩(wěn)定性及其精度,效果良好。關(guān)鍵詞
2009-08-11 20:23:46
人工神經(jīng)網(wǎng)絡(luò)課件
2016-06-19 10:15:48
簡單理解LSTM神經(jīng)網(wǎng)絡(luò)
2021-01-28 07:16:57
圖卷積神經(jīng)網(wǎng)絡(luò)
2019-08-20 12:05:29
全連接神經(jīng)網(wǎng)絡(luò)和卷積神經(jīng)網(wǎng)絡(luò)的區(qū)別
2019-06-06 14:21:42
正在從事智能假肢的課題,需要用到,這篇給我的實(shí)現(xiàn)起到到很好的指導(dǎo)意義,特此轉(zhuǎn)載,也特此感謝作者,利用顏色傳感器讀取pH試紙的顏色,然后得到他代表的pH值。一開始想擬合出一個(gè)關(guān)于RGB和pH的函數(shù),但是總是效果不好。于是利用神經(jīng)網(wǎng)絡(luò)來根據(jù)RGB判斷他的pH值。思路是首先利用MATLAB訓(xùn)練...
2021-08-17 08:19:35
以前的神經(jīng)網(wǎng)絡(luò)幾乎都是部署在云端(服務(wù)器上),設(shè)備端采集到數(shù)據(jù)通過網(wǎng)絡(luò)發(fā)送給服務(wù)器做inference(推理),結(jié)果再通過網(wǎng)絡(luò)返回給設(shè)備端。如今越來越多的神經(jīng)網(wǎng)絡(luò)部署在嵌入式設(shè)備端上,即
2021-12-23 06:16:40
卷積神經(jīng)網(wǎng)絡(luò)為什么適合圖像處理?
2022-09-08 10:23:10
卷積神經(jīng)網(wǎng)絡(luò)(CNN)究竟是什么,鑒于神經(jīng)網(wǎng)絡(luò)在工程上經(jīng)歷了曲折的歷史,您為什么還會(huì)在意它呢? 對(duì)于這些非常中肯的問題,我們似乎可以給出相對(duì)簡明的答案。
2019-07-17 07:21:50
等[16- 18]進(jìn)行分類。特征提取和分類器的 設(shè)計(jì)是圖片分類等任務(wù)的關(guān)鍵,對(duì)分類結(jié)果的好壞 有著最為直接的影響。卷積神經(jīng)網(wǎng)絡(luò)可以自動(dòng)地從 訓(xùn)練樣本中學(xué)習(xí)特征并且分類,解決了人工特征設(shè)計(jì) 的局限性
2022-08-02 10:39:39
卷積神經(jīng)網(wǎng)絡(luò)的層級(jí)結(jié)構(gòu) 卷積神經(jīng)網(wǎng)絡(luò)的常用框架
2020-12-29 06:16:44
抽象人工智能 (AI) 的世界正在迅速發(fā)展,人工智能越來越多地支持以前無法實(shí)現(xiàn)或非常難以實(shí)現(xiàn)的應(yīng)用程序。本系列文章解釋了卷積神經(jīng)網(wǎng)絡(luò) (CNN) 及其在 AI 系統(tǒng)中機(jī)器學(xué)習(xí)中的重要性。CNN 是從
2023-02-23 20:11:10
什么是卷積神經(jīng)網(wǎng)絡(luò)?ImageNet-2010網(wǎng)絡(luò)結(jié)構(gòu)是如何構(gòu)成的?有哪些基本參數(shù)?
2021-06-17 11:48:22
我們可以對(duì)神經(jīng)網(wǎng)絡(luò)架構(gòu)進(jìn)行優(yōu)化,使之適配微控制器的內(nèi)存和計(jì)算限制范圍,并且不會(huì)影響精度。我們將在本文中解釋和探討深度可分離卷積神經(jīng)網(wǎng)絡(luò)在 Cortex-M 處理器上實(shí)現(xiàn)關(guān)鍵詞識(shí)別的潛力。關(guān)鍵詞識(shí)別
2021-07-26 09:46:37
在xr806板子上如何實(shí)現(xiàn)用ncnn跑神經(jīng)網(wǎng)絡(luò)mnis呢?
2021-12-28 06:51:07
最近在學(xué)習(xí)電機(jī)的智能控制,上周學(xué)習(xí)了基于單神經(jīng)元的PID控制,這周研究基于BP神經(jīng)網(wǎng)絡(luò)的PID控制。神經(jīng)網(wǎng)絡(luò)具有任意非線性表達(dá)能力,可以通過對(duì)系統(tǒng)性能的學(xué)習(xí)來實(shí)現(xiàn)具有最佳組合的PID控制。利用BP
2021-09-07 07:43:47
摘 要:本文給出了采用ADXL335加速度傳感器來采集五個(gè)手指和手背的加速度三軸信息,并通過ZigBee無線網(wǎng)絡(luò)傳輸來提取手勢(shì)特征量,同時(shí)利用BP神經(jīng)網(wǎng)絡(luò)算法進(jìn)行誤差分析來實(shí)現(xiàn)手勢(shì)識(shí)別的設(shè)計(jì)方法
2018-11-13 16:04:45
基于BP神經(jīng)網(wǎng)絡(luò)的辨識(shí)
2018-01-04 13:37:27
FPGA實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)關(guān)鍵問題分析基于FPGA的ANN實(shí)現(xiàn)方法基于FPGA的神經(jīng)網(wǎng)絡(luò)的性能評(píng)估及局限性
2021-04-30 06:58:13
基于RBF神經(jīng)網(wǎng)絡(luò)的辨識(shí)
2018-01-04 13:38:52
FPGA 上實(shí)現(xiàn)卷積神經(jīng)網(wǎng)絡(luò) (CNN)。CNN 是一類深度神經(jīng)網(wǎng)絡(luò),在處理大規(guī)模圖像識(shí)別任務(wù)以及與機(jī)器學(xué)習(xí)類似的其他問題方面已大獲成功。在當(dāng)前案例中,針對(duì)在 FPGA 上實(shí)現(xiàn) CNN 做一個(gè)可行性研究
2019-06-19 07:24:41
如何使用STM32F4+MPU9150實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)識(shí)別手勢(shì)?
2021-11-19 07:06:48
如何用stm32cube.ai簡化人工神經(jīng)網(wǎng)絡(luò)映射?如何使用stm32cube.ai部署神經(jīng)網(wǎng)絡(luò)?
2021-10-11 08:05:42
不確定因素影響,并且隨著可編程片上系統(tǒng)SoPC和大規(guī)模現(xiàn)場(chǎng)可編程門陣列FPGA的出現(xiàn),為神經(jīng)網(wǎng)絡(luò)控制器的硬件實(shí)現(xiàn)提供了新的載體。
2019-08-12 06:25:35
原文鏈接:http://tecdat.cn/?p=5725 神經(jīng)網(wǎng)絡(luò)是一種基于現(xiàn)有數(shù)據(jù)創(chuàng)建預(yù)測(cè)的計(jì)算系統(tǒng)。如何構(gòu)建神經(jīng)網(wǎng)絡(luò)?神經(jīng)網(wǎng)絡(luò)包括:輸入層:根據(jù)現(xiàn)有數(shù)據(jù)獲取輸入的層隱藏層:使用反向傳播優(yōu)化輸入變量權(quán)重的層,以提高模型的預(yù)測(cè)能力輸出層:基于輸入和隱藏層的數(shù)據(jù)輸出預(yù)測(cè)
2021-07-12 08:02:11
(Digital Signal Processor)相比,現(xiàn)場(chǎng)可編程門陣列(Field Programma-ble Gate Array,F(xiàn)PGA)在神經(jīng)網(wǎng)絡(luò)的實(shí)現(xiàn)上更具優(yōu)勢(shì)。DSP處理器在處理時(shí)采用指令順序執(zhí)行
2019-08-08 06:11:30
FPGA的嵌入式應(yīng)用。某人工神經(jīng)網(wǎng)絡(luò)的FPGA處理器能夠?qū)?shù)據(jù)進(jìn)行運(yùn)算處理,為了實(shí)現(xiàn)集數(shù)據(jù)通信、操作控制和數(shù)據(jù)處理于一體的便攜式神經(jīng)網(wǎng)絡(luò)處理器,需要設(shè)計(jì)一種基于嵌入式ARM內(nèi)核及現(xiàn)場(chǎng)可編程門陣列FPGA的主從結(jié)構(gòu)處理系統(tǒng)滿足要求。
2019-09-20 06:15:20
有提供編寫神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)程序服務(wù)的嗎?
2011-12-10 13:50:46
誰有利用LABVIEW 實(shí)現(xiàn)bp神經(jīng)網(wǎng)絡(luò)的程序啊(我用的版本是8.6的 )
2012-11-26 14:54:59
求助地震波神經(jīng)網(wǎng)絡(luò)程序,共同交流!!
2013-05-11 08:14:19
小女子做基于labview的蒸發(fā)過程中液位的控制,想使用神經(jīng)網(wǎng)絡(luò)pid控制,請(qǐng)問這個(gè)控制方法可以嗎?有誰會(huì)神經(jīng)網(wǎng)絡(luò)pid控制么。。。叩謝
2016-09-23 13:43:16
求助大神 小的現(xiàn)在有個(gè)難題: 一組車重實(shí)時(shí)數(shù)據(jù) 對(duì)應(yīng)一個(gè)車重的最終數(shù)值(一個(gè)一維數(shù)組輸入對(duì)應(yīng)輸出一個(gè)數(shù)值) 這其中可能經(jīng)過均值、方差、去掉N個(gè)最大值、、、等等的計(jì)算 我的目的就是弄清楚這個(gè)中間計(jì)算過程 最近實(shí)在想不出什么好辦法就打算試試神經(jīng)網(wǎng)絡(luò) 請(qǐng)教大神用什么神經(jīng)網(wǎng)絡(luò)好求神經(jīng)網(wǎng)絡(luò)程序
2016-07-14 13:35:44
求高手,基于labview的BP神經(jīng)網(wǎng)絡(luò)算法的實(shí)現(xiàn)過程,最好有程序哈,謝謝!!
2012-12-10 14:55:50
最簡單的神經(jīng)網(wǎng)絡(luò)
2019-09-11 11:57:36
脈沖耦合神經(jīng)網(wǎng)絡(luò)(PCNN)在FPGA上的實(shí)現(xiàn),實(shí)現(xiàn)數(shù)據(jù)分類功能,有報(bào)酬。QQ470345140.
2013-08-25 09:57:14
`將非局部計(jì)算作為獲取長時(shí)記憶的通用模塊,提高神經(jīng)網(wǎng)絡(luò)性能在深度神經(jīng)網(wǎng)絡(luò)中,獲取長時(shí)記憶(long-range dependency)至關(guān)重要。對(duì)于序列數(shù)據(jù)(例如語音、語言),遞歸運(yùn)算
2018-11-12 14:52:50
提出了一種新的基于遞歸神經(jīng)網(wǎng)絡(luò)的快速收斂盲均衡算法。設(shè)計(jì)中采用觀測(cè)信號(hào)的四階統(tǒng)計(jì)量構(gòu)造代價(jià)函數(shù),簡化了系統(tǒng)的復(fù)雜度;利用實(shí)時(shí)遞歸學(xué)習(xí)算法對(duì)系統(tǒng)參數(shù)進(jìn)行動(dòng)態(tài)調(diào)
2009-05-10 12:01:50 12
12 為使較低精度傳感器獲得較高精度,以提高傳感器的性能價(jià)格比。本文提出人工神經(jīng)網(wǎng)絡(luò)提高傳感器精度的新方法。該神經(jīng)網(wǎng)絡(luò)可以看成是一個(gè)可以濾去傳感器信號(hào)噪聲的非線性濾
2009-06-16 16:15:0212 提出了一種基于神經(jīng)網(wǎng)絡(luò)的傳感器故障監(jiān)測(cè)與診斷的新方法. 該方法先用BP 網(wǎng)絡(luò)的預(yù)測(cè)輸出和傳感器實(shí)際輸出之差來判斷傳感器是否發(fā)生了故障,然后用函數(shù)型連接神經(jīng)網(wǎng)絡(luò)模擬傳
2009-06-23 08:57:0327 該文介紹了一種基于人工神經(jīng)網(wǎng)絡(luò)進(jìn)行氣體傳感器故障檢測(cè)的新方法,文中利用單個(gè)氣體傳感器的輸出信息為氣體傳感器建立了動(dòng)態(tài)非線性神經(jīng)網(wǎng)絡(luò)氣體傳感器輸出模型,并利用該
2009-06-26 11:37:2613 介紹了用神經(jīng)網(wǎng)絡(luò)校正傳感器系統(tǒng)非線性誤差的原理和方法,提出了基于BP 神經(jīng)網(wǎng)絡(luò)傳感器非線性誤差校正及其模型、算法與實(shí)現(xiàn)技術(shù)。通過計(jì)算機(jī)仿真與應(yīng)用,顯示出這種逆模型不但
2009-06-29 10:22:0612 簡要分析由MEMS 工藝制成的新型微氣體傳感器陣列的原理及其優(yōu)點(diǎn),在此基礎(chǔ)上,應(yīng)用人工神經(jīng)網(wǎng)絡(luò)對(duì)氣體傳感器陣列的輸出進(jìn)行模式分類、識(shí)別,實(shí)現(xiàn)對(duì)單一或混合氣體的有選擇性探測(cè)
2009-06-30 10:03:328 針對(duì)火電廠汽輪發(fā)電機(jī)組經(jīng)濟(jì)性監(jiān)測(cè)系統(tǒng)中參數(shù)失效的問題,提出了利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)的仿真手段作為虛擬傳感器。分析了徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)的原理與特點(diǎn),總結(jié)了求解各層權(quán)
2009-06-30 10:36:0512 多傳感器信息集成與融合在處理信息中呈現(xiàn)出較好的實(shí)用性和優(yōu)越性。介紹了有關(guān)多傳感器信息集成與融合方面的基本知識(shí),分析了傳統(tǒng)的信息融合與運(yùn)用神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)多傳感器信
2009-06-30 16:59:2721 提出了一種基于神經(jīng)網(wǎng)絡(luò)的傳感器故障監(jiān)測(cè)與診斷的新方法. 該方法先用BP 網(wǎng)絡(luò)的預(yù)測(cè)輸出和傳感器實(shí)際輸出之差來判斷傳感器是否發(fā)生了故障,然后用函數(shù)型連接神經(jīng)網(wǎng)絡(luò)模擬傳
2009-07-04 11:14:5318 研究了遞歸網(wǎng)絡(luò)模型在傳感器動(dòng)態(tài)建模中的應(yīng)用,給出了遞歸網(wǎng)絡(luò)模型的結(jié)構(gòu)及相應(yīng)的訓(xùn)練算法。該方法避免了傳感器模型階次的選擇的困難。試驗(yàn)結(jié)果表明,應(yīng)用遞歸網(wǎng)絡(luò)對(duì)傳感器進(jìn)
2009-07-07 08:54:237 為使較低精度傳感器獲得較高精度,以提高傳感器的性能價(jià)格比。本文提出人工神經(jīng)網(wǎng)絡(luò)提高傳感器精度的新方法。該神經(jīng)網(wǎng)絡(luò)可以看成是一個(gè)可以濾去傳感器信號(hào)噪聲的非線性濾
2009-07-07 09:01:4826 大型熱力控制系統(tǒng)必須能夠檢測(cè)傳感器故障,并采取相應(yīng)的措施,保證控制過程的順利進(jìn)行。提出了一種基于Powell 神經(jīng)網(wǎng)絡(luò)的故障檢測(cè)新方法,為系統(tǒng)中每一個(gè)傳感器構(gòu)造一個(gè)神經(jīng)網(wǎng)絡(luò)
2009-07-07 09:21:076 本文基于神經(jīng)網(wǎng)絡(luò)可以對(duì)非線性系統(tǒng)的任意逼近能力, 建立了六維腕力傳感器的補(bǔ)償模糊神經(jīng)網(wǎng)絡(luò)模型, 仿真結(jié)果表明, 這種補(bǔ)償模糊神經(jīng)網(wǎng)絡(luò)對(duì)六維腕力傳感器非線性系統(tǒng)逼近精度
2009-07-14 09:22:2015 提出了基于人工神經(jīng)網(wǎng)絡(luò)進(jìn)行多維力傳感器靜態(tài)解耦的方法。
2009-07-18 10:06:0010 研究了基于神經(jīng)網(wǎng)絡(luò)的多傳感器融合技術(shù),并將其應(yīng)用于自主吸塵機(jī)器人中。給出了神經(jīng)網(wǎng)絡(luò)傳感器融合技術(shù)的基本原理,探索了改進(jìn)的BP 信息融合算法,使得改進(jìn)后的算法在收斂
2009-12-31 12:00:1411 基于神經(jīng)網(wǎng)絡(luò)的開關(guān)磁阻電機(jī)無位置傳感器控制-夏長亮
2017-01-21 11:54:395 改進(jìn)遞歸最小二乘RBF神經(jīng)網(wǎng)絡(luò)溶解氧預(yù)測(cè)_袁紅春
2017-03-19 19:04:391 蛋白質(zhì)二級(jí)結(jié)構(gòu)預(yù)測(cè)是結(jié)構(gòu)生物學(xué)中的一個(gè)重要問題。針對(duì)八類蛋白質(zhì)二級(jí)結(jié)構(gòu)預(yù)測(cè),提出了一種基于遞歸神經(jīng)網(wǎng)絡(luò)和前饋神經(jīng)網(wǎng)絡(luò)的深度學(xué)習(xí)預(yù)測(cè)算法。該算法通過雙向遞歸神經(jīng)網(wǎng)絡(luò)建模氨基酸間的局部和長程相互作用
2017-12-03 09:41:149 算法進(jìn)行訓(xùn)練。值得指出的是,BP算法不僅可用于多層前饋神經(jīng)網(wǎng)絡(luò),還可以用于其他類型的神經(jīng)網(wǎng)絡(luò),例如訓(xùn)練遞歸神經(jīng)網(wǎng)絡(luò)。但我們通常說 “BP 網(wǎng)絡(luò)” 時(shí),一般是指用 BP 算法訓(xùn)練的多層前饋神經(jīng)網(wǎng)絡(luò)。
2018-06-19 15:17:15 42819
42819 
有個(gè)事情可能會(huì)讓初學(xué)者驚訝:神經(jīng)網(wǎng)絡(luò)模型并不復(fù)雜!『神經(jīng)網(wǎng)絡(luò)』這個(gè)詞讓人覺得很高大上,但實(shí)際上神經(jīng)網(wǎng)絡(luò)算法要比人們想象的簡單。
這篇文章完全是為新手準(zhǔn)備的。我們會(huì)通過用Python從頭實(shí)現(xiàn)一個(gè)神經(jīng)網(wǎng)絡(luò)來理解神經(jīng)網(wǎng)絡(luò)的原理。本文的脈絡(luò)是:
2023-02-27 15:05:34451 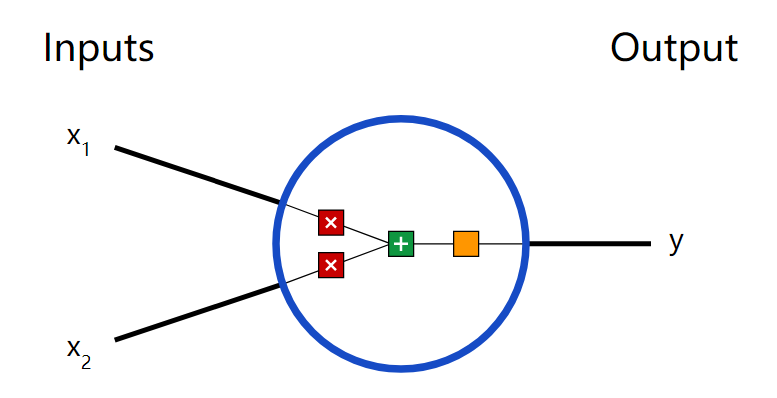
有個(gè)事情可能會(huì)讓初學(xué)者驚訝:神經(jīng)網(wǎng)絡(luò)模型并不復(fù)雜!『神經(jīng)網(wǎng)絡(luò)』這個(gè)詞讓人覺得很高大上,但實(shí)際上神經(jīng)網(wǎng)絡(luò)算法要比人們想象的簡單。
這篇文章完全是為新手準(zhǔn)備的。我們會(huì)通過用Python從頭實(shí)現(xiàn)一個(gè)神經(jīng)網(wǎng)絡(luò)來理解神經(jīng)網(wǎng)絡(luò)的原理。本文的脈絡(luò)是:
2023-02-27 15:06:13377 
有個(gè)事情可能會(huì)讓初學(xué)者驚訝:神經(jīng)網(wǎng)絡(luò)模型并不復(fù)雜!『神經(jīng)網(wǎng)絡(luò)』這個(gè)詞讓人覺得很高大上,但實(shí)際上神經(jīng)網(wǎng)絡(luò)算法要比人們想象的簡單。
這篇文章完全是為新手準(zhǔn)備的。我們會(huì)通過用Python從頭實(shí)現(xiàn)一個(gè)神經(jīng)網(wǎng)絡(luò)來理解神經(jīng)網(wǎng)絡(luò)的原理。本文的脈絡(luò)是:
2023-02-27 15:06:18467 
有個(gè)事情可能會(huì)讓初學(xué)者驚訝:神經(jīng)網(wǎng)絡(luò)模型并不復(fù)雜!『神經(jīng)網(wǎng)絡(luò)』這個(gè)詞讓人覺得很高大上,但實(shí)際上神經(jīng)網(wǎng)絡(luò)算法要比人們想象的簡單。
這篇文章完全是為新手準(zhǔn)備的。我們會(huì)通過用Python從頭實(shí)現(xiàn)一個(gè)神經(jīng)網(wǎng)絡(luò)來理解神經(jīng)網(wǎng)絡(luò)的原理。本文的脈絡(luò)是:
2023-02-27 15:06:21443 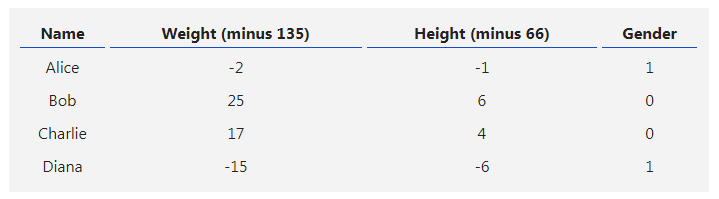
在本文中,我們將了解深度神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)知識(shí)和三個(gè)最流行神經(jīng)網(wǎng)絡(luò):多層神經(jīng)網(wǎng)絡(luò)(MLP),卷積神經(jīng)網(wǎng)絡(luò)(CNN)和遞歸神經(jīng)網(wǎng)絡(luò)(RNN)。
2023-05-15 14:19:181096 
電子發(fā)燒友網(wǎng)站提供《PyTorch教程之從零開始的遞歸神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-06-05 09:55:210 電子發(fā)燒友網(wǎng)站提供《PyTorch教程9.6之遞歸神經(jīng)網(wǎng)絡(luò)的簡潔實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-06-05 09:56:100 電子發(fā)燒友網(wǎng)站提供《PyTorch教程10.3之深度遞歸神經(jīng)網(wǎng)絡(luò).pdf》資料免費(fèi)下載
2023-06-05 15:12:030 電子發(fā)燒友網(wǎng)站提供《PyTorch教程10.4之雙向遞歸神經(jīng)網(wǎng)絡(luò).pdf》資料免費(fèi)下載
2023-06-05 15:13:290 電子發(fā)燒友網(wǎng)站提供《PyTorch教程16.2之情感分析:使用遞歸神經(jīng)網(wǎng)絡(luò).pdf》資料免費(fèi)下載
2023-06-05 10:55:070
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論