今天想分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法,這種算法在步進(jìn)電機(jī)調(diào)速方案中可以說是一種非常優(yōu)異的方案。
2022-07-20 09:39:59 2269
2269 [導(dǎo)讀] 大家好,我是逸珺。今天想分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法,這種算法在步進(jìn)電機(jī)調(diào)速方案中可以說是一種非常優(yōu)異的方案。梯形調(diào)速算法 為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈...
2021-09-01 07:53:17
加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法是什么?如何進(jìn)行融合?
2021-11-12 07:15:08
ADC分為哪幾種?ADC的參數(shù)指標(biāo)有哪些?ADC0804工作原理及其實(shí)現(xiàn)方式是什么?
2021-08-24 07:13:31
使用梯形/S形加減速算法。加減速算法的實(shí)現(xiàn)中,我沒有采用之前的定時(shí)器主從模式的方式。因?yàn)闆]有想到如何消除在定時(shí)器中斷服務(wù)程序中切換PWM波輸出頻率時(shí)產(chǎn)生的短暫延時(shí)。看來很多文章,還是試著用翻轉(zhuǎn)電平的方法來產(chǎn)生PWM波。原理/思路...
2021-07-08 09:52:37
2.概述一個(gè)簡(jiǎn)單的AI開發(fā)sampleGithub開源的數(shù)字手勢(shì)識(shí)別CNN模型,識(shí)別數(shù)字0-10十一種手勢(shì)類LeNet-5,兩個(gè)卷積層,兩個(gè)池化層,一個(gè)全連接層,一個(gè)Softmax輸出層3.RKNN
2022-04-02 15:22:11
項(xiàng)目中對(duì)步進(jìn)電機(jī)運(yùn)行速度有了新要求,所以嘗試實(shí)現(xiàn)梯形加減速算法,S形加減速算法。本文主要實(shí)現(xiàn)S形加減速算法。原理/思路步進(jìn)電機(jī)有啟動(dòng)頻率這一概念。在啟動(dòng)時(shí)有一個(gè)最大啟動(dòng)頻率,在低于最大啟動(dòng)頻率的速度
2021-06-28 10:07:24
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-08-31 08:55:42
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM方波)。S型曲線的的方程,在[-5,5]的圖形如下圖所示:如要將此曲線應(yīng)用在...
2021-09-03 06:52:10
TF之CNN:CNN實(shí)現(xiàn)mnist數(shù)據(jù)集預(yù)測(cè) 96%采用placeholder用法+2層C及其max_pool法+隱藏層dropout法+輸出層softmax法+目標(biāo)函數(shù)cross_entropy法+
2018-12-19 17:02:40
1 CNN簡(jiǎn)介
CNN即卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Networks),是一類包含卷積計(jì)算的神經(jīng)網(wǎng)絡(luò),是深度學(xué)習(xí)(deep learning)的代表算法之一,在圖像識(shí)別
2023-08-18 06:56:34
人臉檢測(cè)算法及新的快速算法人臉識(shí)別設(shè)備憑借著便捷的應(yīng)用,以及更加新潮的技術(shù),俘獲了不少人的好感。于是,它的應(yīng)用也在日益的變得更加的廣泛。由中國(guó)電子學(xué)會(huì)主辦的全國(guó)圖形圖像技術(shù)應(yīng)用大會(huì),行業(yè)專家將介紹
2013-09-26 15:13:24
本帖翻譯自IMU(加速度計(jì)和陀螺儀設(shè)備)在嵌入式應(yīng)用中使用的指南。這篇文章主要介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法,以及如何融合這兩者,側(cè)重算法、思想的討論
2021-08-06 08:04:17
本帖翻譯自IMU(加速度計(jì)和陀螺儀設(shè)備)在嵌入式應(yīng)用中使用的指南。這篇文章主要介紹加速度計(jì)和陀螺儀的數(shù)學(xué)模型和基本算法,以及如何融合這兩者,側(cè)重算法、思想的討論介紹本指南旨在向興趣者介紹慣性MEMS(微機(jī)電系統(tǒng))傳感器,特別是加速度計(jì)和陀螺儀以及其他整合IMU(慣性測(cè)量
2021-08-09 06:46:21
關(guān)于S型曲線加減速算法的知識(shí)點(diǎn)不看肯定后悔
2021-10-28 08:52:37
[導(dǎo)讀] 大家好,我是逸珺。今天想分享一種超級(jí)實(shí)用的步進(jìn)電機(jī)調(diào)速算法,這種算法在步進(jìn)電機(jī)調(diào)速方案中可以說是一種非常優(yōu)異的方案。梯形調(diào)速算法為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈沖就動(dòng)多少步
2021-09-03 09:05:44
加減速算法是運(yùn)動(dòng)控制中的關(guān)鍵技術(shù)之一,也是實(shí)現(xiàn)高速、高效率的關(guān)鍵因素之一。在工業(yè)控制中,一方面要求加工的過程平滑、穩(wěn)定,柔性沖擊小;另一方面需要響應(yīng)時(shí)間快,反應(yīng)迅速。在保證控制精度的前提下來提高加工
2021-07-07 07:37:15
你好我使用 STM32CUBE-AI v5.1.2 ApplicationTemplate 將簡(jiǎn)單的 CNN 導(dǎo)入到 STM32L462RCT我發(fā)現(xiàn)壓縮模型對(duì)推理時(shí)間沒有影響。aiRun 程序在 8
2023-01-29 06:24:08
電機(jī)加減速算法目的:對(duì)于上述2、3的場(chǎng)合,步進(jìn)電機(jī)容易出現(xiàn)丟步和過沖甚至無法啟動(dòng)的現(xiàn)象,所以加入該算法來解決這一問題。3. 算法實(shí)現(xiàn)3.1加減速期望曲線...
2021-07-07 07:58:50
CNN 更容易滿足實(shí)際應(yīng)用場(chǎng)景中 的低功耗、實(shí)時(shí)性要求。而且目標(biāo)檢測(cè)算法發(fā)展迅速,針對(duì) CNN 的硬件加速研究也大有可 為。所以本項(xiàng)目計(jì)劃使用 PYNQ-Z2 開發(fā)板設(shè)計(jì)一個(gè)硬件電路來加速目標(biāo)檢測(cè)算法
2023-06-20 19:45:12
基于LabVIEW的語音信號(hào)變速算法設(shè)計(jì)與實(shí)現(xiàn)要做這樣一個(gè)題目求大神指教 最好有現(xiàn)成的 可以加我q聯(lián)系 690316376
2016-04-19 09:49:50
基礎(chǔ)的 AlexNet 算法框架,極大的提升了算法的速度和準(zhǔn)確度。相比于傳統(tǒng)目標(biāo)檢測(cè)算法,以CNN 為核心的目標(biāo)檢測(cè)算法具有準(zhǔn)確率高、檢測(cè)速度快等優(yōu)點(diǎn),發(fā)展?jié)摿薮蟆8鶕?jù)神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)不同,可以將目標(biāo)檢測(cè)算法
2023-03-06 13:55:27
建立視覺信號(hào)的并行、快速處理的數(shù)學(xué)模型和快速算法,實(shí)現(xiàn)圖像信號(hào)和視神經(jīng)纖維上動(dòng)作電位的轉(zhuǎn)換,是對(duì)信息科學(xué)中信號(hào)處理提出的一個(gè)新的挑戰(zhàn)[2]。第一代視覺仿生眼的預(yù)期功能是讓患者能進(jìn)行慢速的閱讀,識(shí)別一些
2009-09-19 09:35:15
【技術(shù)綜述】為了壓榨CNN模型,這幾年大家都干了什么
2019-05-29 14:49:27
本文提出一種基于TM1300的4x4整數(shù)變換的快速算法,使用了并行算是技術(shù)大大減少了計(jì)算量。
2021-06-04 06:41:35
MIMRTX1064(SDK2.13.0)的KWS demo中放置了ds_cnn_s.tflite文件,提供demo中使用的模型示例。在 read.me 中,聲明我可以找到腳本,但是,該文檔中的腳本
2023-04-19 06:11:51
怎么實(shí)現(xiàn)STM32步進(jìn)電機(jī)S型加減速算法?
2021-10-11 07:57:55
怎么實(shí)現(xiàn)S形加減速算法?
2021-10-09 09:16:34
怎么實(shí)現(xiàn)步進(jìn)電機(jī)S型曲線加減速算法?
2021-10-12 10:02:51
梯形加減速速度曲線采用“梯形”加減速算法,在運(yùn)動(dòng)過程中分成以下四個(gè)狀態(tài):空閑狀態(tài),加速狀態(tài),勻速狀態(tài)與減速狀態(tài)。圖1 梯形加減速速度曲線加減速算法實(shí)現(xiàn)...
2022-01-11 08:25:05
步進(jìn)電機(jī)S加減速算法與查表方式哪個(gè)更好,有誰用過,能否提供實(shí)例?
2023-11-08 08:10:26
年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2018-03-20 16:46:13
步進(jìn)電機(jī)為啥需要設(shè)計(jì)一個(gè)調(diào)速算法?
2021-10-29 07:29:16
步進(jìn)電機(jī)加減速算法
2022-01-11 06:45:22
目錄步進(jìn)電機(jī)梯形加減速梯形加減速算法原理分析算法實(shí)現(xiàn)步進(jìn)電機(jī)梯形加減速電機(jī)的控制方式一般分為開環(huán)控制與閉環(huán)控制兩種控制方式,其中開環(huán)控制原理框圖如下:這種種控制方式的特點(diǎn)是:控制簡(jiǎn)單、實(shí)現(xiàn)容易、價(jià)格
2021-07-07 07:53:48
最近公司的一個(gè)項(xiàng)目用帶驅(qū)動(dòng)器的步進(jìn)電機(jī),奈何,經(jīng)理讓我搞個(gè)勻加速的啟動(dòng)和停止。以前從來沒考慮過算法的我,走了很多彎路,不過最后還是解決了這個(gè)問題。梯形加減速應(yīng)該是指數(shù)加速算法和S型加速算法中最簡(jiǎn)單也
2021-07-08 06:49:48
一年前做過的S型曲線加減速算法,再次做的時(shí)候竟然犯錯(cuò),在此總結(jié)記錄一下,方便以后查閱,同時(shí)希望幫助初學(xué)者提供簡(jiǎn)單的參考資料(注:本項(xiàng)目采用的帶細(xì)分的驅(qū)動(dòng)器,MCU的OC比較輸出模塊產(chǎn)生50%的PWM
2021-06-28 08:41:08
目錄步進(jìn)電機(jī)S形加減速簡(jiǎn)介七段S形加減速算法原理分析五段S形加減速算法實(shí)現(xiàn)算法分析查表法編程實(shí)現(xiàn)思路及方法S曲線加減速流程圖步進(jìn)電機(jī)S形加減速簡(jiǎn)介一個(gè)物體從起點(diǎn)運(yùn)動(dòng)到終點(diǎn)要經(jīng)歷加速、勻速、減速的過程
2021-07-08 09:18:53
本文介紹一種基于嵌入式實(shí)時(shí)內(nèi)核ARTXl66的電子差速算法
2021-05-13 06:46:56
我想做虛擬實(shí)驗(yàn)室,比如像物理實(shí)驗(yàn)、化學(xué)實(shí)驗(yàn),目前沒有太多的思路,有經(jīng)驗(yàn)的朋友指導(dǎo)下,目前正在看電路算法。
2017-07-28 11:04:27
如何去選擇并優(yōu)化IDCT快速算法?怎樣去設(shè)計(jì)一種MPEG-4加速器?如何對(duì)MPEG-4加速器進(jìn)行仿真驗(yàn)證?
2021-06-04 07:20:42
推理。 通過這篇文章你可以學(xué)習(xí)到以下內(nèi)容:1)量化算法介紹及其特點(diǎn)分析,讓你知其然并知其所以然; 2)Pytorch 量化實(shí)戰(zhàn),讓你不再紙上談兵;3)模型精度及性能的調(diào)優(yōu)經(jīng)驗(yàn)分享,讓你面對(duì)問題不再束手無策...
2021-07-26 08:08:31
陀螺儀漂移測(cè)試原理及其實(shí)驗(yàn)技術(shù)
2016-08-17 12:09:47
離散傅里葉變換及其快速算法離散傅里葉變換 (Discrete Fourier Transform,DFT)是時(shí)間函數(shù)是離散的,而且頻譜函數(shù)也是離散的變換。3. 1 討論周期序列的 傅里葉級(jí)數(shù)及其性質(zhì)。
2008-10-30 12:54:54 33
33 三維表面粗糙度高斯濾波快速算法:研究了三維表面粗糙度評(píng)定基準(zhǔn)的數(shù)學(xué)模型及采用高斯濾波器得到三維表面評(píng)定基準(zhǔn)的數(shù)字算法,提出一種新的用于三維表面的快速高斯濾波卷積
2009-09-25 15:47:4924 序列圖像運(yùn)動(dòng)目標(biāo)檢測(cè)的一種快速算法:研究了序列視頻圖像中運(yùn)動(dòng)目標(biāo)的檢測(cè)與跟蹤快速算法.研究基于Kalman濾波理論的漸消記憶最小二乘法,用該方法重建背景圖像;采用圖像差
2009-10-26 11:23:2337 一種求解電大平臺(tái)天線互耦的時(shí)域積分方程快速算法:該文針對(duì)電大尺寸平臺(tái)天線互耦問題,提出一種基于幾何繞射理論加速的時(shí)域積分方程快速算法。在求解時(shí)域積分方程的經(jīng)典時(shí)
2009-10-29 13:01:5226 DCT 快速算法是H.264 編碼的關(guān)鍵問題之一。該文根據(jù)H.264 中4×4 塊殘差系數(shù)的分布特征及DCT 系數(shù)的能量分布特性,提出一種基于DCT 系數(shù)子帶劃分的子帶DCT 快速算法。該算法在DCT 和量
2009-11-24 14:47:576 該文對(duì)K 分布雜波模型統(tǒng)計(jì)特性做了深入分析和推導(dǎo),提出了一種新的運(yùn)用樣本算數(shù)平均和幾何平均的高精度低運(yùn)算量的K 分布雜波模型參數(shù)估計(jì)快速算法,并對(duì)算法的估計(jì)精度作了
2009-11-25 14:48:105 摘要:本文介紹了CRC的基本原理和計(jì)算方法,給出了利用C51實(shí)現(xiàn)單片機(jī)CRC的快速算法關(guān)鍵字:CRC;C51;單片機(jī);快速算法
2010-09-10 11:14:5748 雷達(dá)成像近似二維模型及其超分辨算法
現(xiàn)有的雷達(dá)成像超分辨算法是基于目標(biāo)回波信號(hào)的二維正弦信號(hào)模型,所以模型誤差,特別是距離走動(dòng)誤差,將使算法性能嚴(yán)重
2009-10-21 15:45:361888 
為了減小匹配傅里葉變換分析的計(jì)算量,提出了一種基于快速傅里葉變換的快速算法。根據(jù)匹配傅里葉變換的分解將積分形式轉(zhuǎn)化為離散形式,推導(dǎo)出快速算法表達(dá)式。該算法與直接的
2013-07-26 11:48:3677 本文提供兩個(gè)實(shí)用的、能夠在單片機(jī)上通過軟件來實(shí)現(xiàn)CRC快速算法。
2016-03-22 16:40:313 三相多電平逆變器SVPWM的一種統(tǒng)一快速算法
2016-03-30 14:59:5911 一種新型柔性加減速算法,有需要的下來看看
2016-04-29 17:57:0911 微段加工柔性加減速算法研究,有需要的下來看看
2016-04-29 17:57:0923 變加減速算法在位置伺服系統(tǒng)中的應(yīng)用與分析
2016-05-04 14:37:0110 S曲線加減速算法研究,又需要的朋友下來看看
2016-05-04 14:37:0118 第2章-離散傅里葉變換(DFT)及其快速算法(FFT)
2016-12-28 14:23:300 一種改進(jìn)的增維型雙邊濾波的快速算法_李俊峰
2017-01-07 16:00:430 基于FPGA的ECC快速算法研究及設(shè)計(jì)_陳俊杰
2017-01-07 19:08:432 低頻往復(fù)式微動(dòng)磨損測(cè)試系統(tǒng)驅(qū)動(dòng)頻率影響及其實(shí)驗(yàn)研究_王仲楠
2017-01-08 13:26:490 基于光流的運(yùn)動(dòng)目標(biāo)檢測(cè)跟蹤快速算法_關(guān)興來
2017-03-16 15:42:481 一種基于ImpulseC的素域橢圓曲線點(diǎn)乘快速算法_崔強(qiáng)強(qiáng)
2017-03-19 11:46:350 基于查表的無乘法DCT快速算法 Jpeg壓縮算法中的DCT快速算法
2017-09-18 09:47:5514 基于圖像增強(qiáng)方法,本文提出了一種使用亮度映射的圖像去霧快速算法。此算法通過調(diào)整室外多霧場(chǎng)景圖像的對(duì)比度,提高了霧中物體的辨識(shí)度。算法的復(fù)雜度低、處理延遲小,實(shí)時(shí)性高,利于FPGA的實(shí)現(xiàn)。實(shí)現(xiàn)時(shí)不需外存儲(chǔ)器,延時(shí)為ns級(jí),并提供了強(qiáng)度調(diào)節(jié)接口,以適應(yīng)較廣的應(yīng)用環(huán)境。
2017-10-11 18:39:389 DM6446的車牌定位快速算法實(shí)現(xiàn)與優(yōu)化
2017-10-26 15:27:051 基于FPGA的通用CNN加速器整體框架如下,通過Caffe/Tensorflow/Mxnet等框架訓(xùn)練出來的CNN模型,通過編譯器的一系列優(yōu)化生成模型對(duì)應(yīng)的指令;同時(shí),圖片數(shù)據(jù)和模型權(quán)重?cái)?shù)據(jù)按照優(yōu)化規(guī)則進(jìn)行預(yù)處理以及壓縮后通過PCIe下發(fā)到FPGA加速器中
2017-10-27 14:09:589882 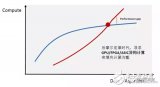
商湯科技算法平臺(tái)團(tuán)隊(duì)和北京大學(xué)高能效實(shí)驗(yàn)室聯(lián)合提出一種基于 FPGA 的快速Winograd算法,可以大幅降低算法復(fù)雜度,改善 FPGA 上的 CNN 性能。
2018-02-07 11:52:068687 
Kortiq提供易于使用,可擴(kuò)展且小巧的CNN加速器。
該設(shè)備支持所有類型的CNN,并動(dòng)態(tài)加速網(wǎng)絡(luò)中的不同層類型。
2018-11-23 06:28:002957 為解決傳統(tǒng)卷積神經(jīng)網(wǎng)絡(luò)(CNN)模型使用池化層進(jìn)行文本特征降維會(huì)損失較多文本語義信息的問題,提出一種基于奇異值分解(SVD)算法的卷積神經(jīng)網(wǎng)絡(luò)模型(SVD-CNN)。首先,采用改進(jìn)的基于密度中心點(diǎn)
2019-05-06 11:42:476 成為了學(xué)術(shù)界和工業(yè)界都重點(diǎn)關(guān)注的研究領(lǐng)域之一。本文主要介紹深度學(xué)習(xí)模型壓縮和加速算法的三個(gè)方向,分別為加速網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)、模型裁剪與稀疏化、量化加速。
2019-06-08 17:26:004836 
MENS)和交錯(cuò)MBNS滑動(dòng)窗口(I-MBNS的多標(biāo)量乘快速算法,分析并比較兩種多標(biāo)量乘快速算法在二元域和素域及不同窗口寬度下的平均運(yùn)算量。實(shí)驗(yàn)結(jié)果表明,與 Shamir和交錯(cuò)非鄰接形式算法相比, Sliding MBNS和I-MBNS算法在標(biāo)量長(zhǎng)度為160bit的二元域上的平均運(yùn)算量分別減少了1
2021-03-11 11:17:4218 為降低屏幕內(nèi)容編碼的計(jì)算復(fù)雜度,提岀一種基于深度學(xué)習(xí)的屏幕內(nèi)容編碼幀內(nèi)CTU深度范圍預(yù)測(cè)快速算法。將編碼足夠數(shù)量的屏幕內(nèi)容視頻幀序列作為訓(xùn)練數(shù)據(jù),通過大量的訓(xùn)練數(shù)據(jù)統(tǒng)計(jì)CTU深度范圍的分布,根據(jù)分布
2021-03-17 11:48:0822 3種插值和3種銳化等預(yù)處理操作,并以多通道圖像作為CNN的輸入層數(shù)據(jù)。通過重新調(diào)整卷積核大小以加深網(wǎng)絡(luò)結(jié)構(gòu)使得輸入層數(shù)據(jù)在極深的CNN模型中訓(xùn)練重構(gòu)高分辨率圖像。實(shí)驗(yàn)結(jié)果表明,與 Bicubic、 SRCNN和MC- SRCNN等算法相比,該算法的峰值信噪比和視覺效
2021-03-23 15:27:0510 內(nèi)部的詞依賴關(guān)系,從而捕獲序列的內(nèi)部結(jié)構(gòu)。重利用淺層特征并與多頭自注意力特征進(jìn)行融合,結(jié)合深度學(xué)習(xí)中的CNN進(jìn)一步優(yōu)化文本情感極性分析效果。在基準(zhǔn)數(shù)據(jù)集 Semeval-2017Task5上進(jìn)行實(shí)驗(yàn),結(jié)果表明,與傳統(tǒng)機(jī)器學(xué)習(xí)算法 CNN ELSTM、 ATT-BLSTM等相比
2021-03-25 15:16:396 S曲線加減速是高檔CNC 系統(tǒng)中的一項(xiàng)重要功能。本文對(duì)S 曲線加速度算法進(jìn)行了深入的研究, 給出了加加速度、加速度、速度、位移的計(jì)算通式, 并對(duì)各種情況進(jìn)行了討論, 通過一個(gè)計(jì)算實(shí)例表明, 本文
2021-03-26 17:09:4416 數(shù)據(jù),訓(xùn)練CNN學(xué)習(xí)信號(hào)的時(shí)頻特征,得到干擾檢測(cè)模型。實(shí)驗(yàn)結(jié)果表明,與傳統(tǒng)的機(jī)器學(xué)習(xí)算法相比,該算法能更準(zhǔn)確地檢測(cè)出廣播信號(hào)中是否存在同頻干擾信號(hào),其干擾檢測(cè)準(zhǔn)確率達(dá)95.0%。
2021-05-25 16:53:569 基于CNN與約束概率矩陣分解的推薦算法
2021-06-17 16:36:197 面向硬件實(shí)現(xiàn)的HEVC幀內(nèi)編碼快速算法
2021-06-21 16:30:1510 模擬退火算法弛像時(shí)間模型及其實(shí)驗(yàn)分析
2021-06-24 15:47:243 點(diǎn)到曲線最近距離的快速計(jì)算方法及其實(shí)驗(yàn)
2021-06-25 11:27:3916 交通軌跡大數(shù)據(jù)預(yù)處理方法及其實(shí)驗(yàn)分析
2021-06-27 15:00:176 IOS論文出自MIT的韓松實(shí)驗(yàn)室,第一作者為Yaoyao Ding, 這是他在韓松實(shí)驗(yàn)室實(shí)習(xí)時(shí)的成果。現(xiàn)有的CNN推理加速技術(shù)關(guān)注于優(yōu)化算子內(nèi)部的并...
2022-01-25 18:09:360 為啥需要設(shè)計(jì)一個(gè)調(diào)速算法呢?步進(jìn)電機(jī)不是給多少脈沖就動(dòng)多少步嗎?但是帶上負(fù)載了就可能失步,所謂失步,簡(jiǎn)單理解就是
實(shí)際電機(jī)軸轉(zhuǎn)過的度數(shù),沒有輸入脈沖對(duì)應(yīng)度數(shù)多。為什么會(huì)這樣呢?電機(jī)的扭矩有可能無法
2023-03-23 10:53:140 Studio 實(shí)驗(yàn)室在 SageMaker Studio Lab 中打開筆記本
除了第 14.7 節(jié)中描述的單次多框檢測(cè)之外,基于區(qū)域的 CNN 或具有 CNN 特征的區(qū)域 (R-CNN) 也是將深度學(xué)習(xí)
2023-06-05 15:44:37339 
cnn卷積神經(jīng)網(wǎng)絡(luò)算法 cnn卷積神經(jīng)網(wǎng)絡(luò)模型 卷積神經(jīng)網(wǎng)絡(luò)(CNN)是一種特殊的神經(jīng)網(wǎng)絡(luò),具有很強(qiáng)的圖像識(shí)別和數(shù)據(jù)分類能力。它通過學(xué)習(xí)權(quán)重和過濾器,自動(dòng)提取圖像和其他類型數(shù)據(jù)的特征。在過去的幾年
2023-08-21 17:15:57946 電子發(fā)燒友網(wǎng)站提供《基于快速傅里葉變換的快速算法.pdf》資料免費(fèi)下載
2023-11-06 10:25:410
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論