傳統(tǒng)的機(jī)器人控制技術(shù)大多是基于模型的控制方法,無法得到滿意的軌跡跟蹤效果,模糊控制和神經(jīng)網(wǎng)絡(luò)等人工智能的發(fā)展為解決機(jī)器人軌跡跟蹤問題提供了新的思路。本文采用高斯函數(shù)作為模糊隸屬函數(shù),將模糊控制
2016-09-19 14:34:39 1737
1737 
智能控制--第7章 典型神經(jīng)網(wǎng)絡(luò).ppt
2017-09-24 11:16:11
智能控制--第8章 高級(jí)神經(jīng)網(wǎng)絡(luò).ppt
2017-09-24 11:17:19
智能控制--第9章 神經(jīng)網(wǎng)絡(luò)控制.ppt
2017-09-24 11:19:25
,特別是溫度的影響是測量誤差的主要,為保證SAW壓力傳感器高準(zhǔn)確度和高靈敏度測量,必須進(jìn)行有效的溫度補(bǔ)償。本文將神經(jīng)網(wǎng)絡(luò)和模糊控制技術(shù)相結(jié)合,對(duì)SAW壓力傳感器進(jìn)行智能化溫度補(bǔ)償,通過此方法進(jìn)行的改進(jìn)
2018-10-24 11:36:52
神經(jīng)網(wǎng)絡(luò)算法怎么去控制溫控系統(tǒng),為什么不用pid控制
2023-10-27 06:10:14
03_深度學(xué)習(xí)入門_神經(jīng)網(wǎng)絡(luò)和反向傳播算法
2019-09-12 07:08:05
網(wǎng)絡(luò)BP算法的程序設(shè)計(jì) 多層前向網(wǎng)絡(luò)BP算法源程序 第4章 Hopfield網(wǎng)絡(luò)模型 4.1 離散型Hopfield神經(jīng)網(wǎng)絡(luò) 4.2 連續(xù)型Hopfield神經(jīng)網(wǎng)絡(luò) Hopfield網(wǎng)絡(luò)模型
2012-03-20 11:32:43
基于深度學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)算法
2019-05-16 17:25:05
,神經(jīng)網(wǎng)絡(luò)之父Hiton始終堅(jiān)持計(jì)算機(jī)能夠像人類一樣思考,用直覺而非規(guī)則。盡管這一觀點(diǎn)被無數(shù)人質(zhì)疑過無數(shù)次,但隨著數(shù)據(jù)的不斷增長和數(shù)據(jù)挖掘技術(shù)的不斷進(jìn)步,神經(jīng)網(wǎng)絡(luò)開始在語音和圖像等方面超越基于邏輯的人工智能
2018-06-05 10:11:50
針對(duì)傳統(tǒng)比例積分(PI)控制在電機(jī)控制中控制效果不良的問題,設(shè)計(jì)了一種基于向后傳播算法(BP)模糊神經(jīng)網(wǎng)絡(luò)的PI控制器。基于MATLAB/Simulink建立了純電動(dòng)汽車驅(qū)動(dòng)系統(tǒng)的仿真模型,將駕駛員
2019-12-10 16:32:40
CCD圖像分析方法和預(yù)測算法???
2012-07-01 15:20:49
Keras之ML~P:基于Keras中建立的回歸預(yù)測的神經(jīng)網(wǎng)絡(luò)模型(根據(jù)200個(gè)數(shù)據(jù)樣本預(yù)測新的5+1個(gè)樣本)——回歸預(yù)測
2018-12-20 10:43:06
請(qǐng)問:我在用labview做BP神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)故障診斷,在NI官網(wǎng)找到了機(jī)器學(xué)習(xí)工具包(MLT),但是里面沒有關(guān)于這部分VI的幫助文檔,對(duì)于”BP神經(jīng)網(wǎng)絡(luò)分類“這個(gè)范例有很多不懂的地方,比如
2017-02-22 16:08:08
`本篇主要介紹:人工神經(jīng)網(wǎng)絡(luò)的起源、簡單神經(jīng)網(wǎng)絡(luò)模型、更多神經(jīng)網(wǎng)絡(luò)模型、機(jī)器學(xué)習(xí)的步驟:訓(xùn)練與預(yù)測、訓(xùn)練的兩階段:正向推演與反向傳播、以TensorFlow + Excel表達(dá)訓(xùn)練流程以及AI普及化教育之路。`
2020-11-05 17:48:39
電子發(fā)燒友總結(jié)了以“神經(jīng)網(wǎng)絡(luò)”為主題的精選干貨,今后每天一個(gè)主題為一期,希望對(duì)各位有所幫助!(點(diǎn)擊標(biāo)題即可進(jìn)入頁面下載相關(guān)資料)人工神經(jīng)網(wǎng)絡(luò)算法的學(xué)習(xí)方法與應(yīng)用實(shí)例(pdf彩版)卷積神經(jīng)網(wǎng)絡(luò)入門資料MATLAB神經(jīng)網(wǎng)絡(luò)30個(gè)案例分析《matlab神經(jīng)網(wǎng)絡(luò)應(yīng)用設(shè)計(jì)》深度學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)
2019-05-07 19:18:14
今天學(xué)習(xí)了兩個(gè)神經(jīng)網(wǎng)絡(luò),分別是自適應(yīng)諧振(ART)神經(jīng)網(wǎng)絡(luò)與自組織映射(SOM)神經(jīng)網(wǎng)絡(luò)。整體感覺不是很難,只不過一些最基礎(chǔ)的概念容易理解不清。首先ART神經(jīng)網(wǎng)絡(luò)是競爭學(xué)習(xí)的一個(gè)代表,競爭型學(xué)習(xí)
2019-07-21 04:30:00
傳播的,不會(huì)回流),區(qū)別于循環(huán)神經(jīng)網(wǎng)絡(luò)RNN。BP算法(Back Propagation):誤差反向傳播算法,用于更新網(wǎng)絡(luò)中的權(quán)重。BP神經(jīng)網(wǎng)絡(luò)思想:表面上:1. 數(shù)據(jù)信息的前向傳播,從輸入層到隱含層
2019-07-21 04:00:00
人工神經(jīng)網(wǎng)絡(luò)是根據(jù)人的認(rèn)識(shí)過程而開發(fā)出的一種算法。假如我們現(xiàn)在只有一些輸入和相應(yīng)的輸出,而對(duì)如何由輸入得到輸出的機(jī)理并不清楚,那么我們可以把輸入與輸出之間的未知過程看成是一個(gè)“網(wǎng)絡(luò)”,通過不斷地給
2008-06-19 14:40:42
人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network,ANN)是一種類似生物神經(jīng)網(wǎng)絡(luò)的信息處理結(jié)構(gòu),它的提出是為了解決一些非線性,非平穩(wěn),復(fù)雜的實(shí)際問題。那有哪些辦法能實(shí)現(xiàn)人工神經(jīng)網(wǎng)絡(luò)呢?
2019-08-01 08:06:21
簡單理解LSTM神經(jīng)網(wǎng)絡(luò)
2021-01-28 07:16:57
本文使用keras搭建神經(jīng)網(wǎng)絡(luò),實(shí)現(xiàn)基于深度學(xué)習(xí)算法的股票價(jià)格預(yù)測。本文使用的數(shù)據(jù)來源為tushare,一個(gè)免費(fèi)開源接口;且只取開票價(jià)進(jìn)行預(yù)測。import numpy as npimport
2022-02-08 06:40:03
請(qǐng)問用matlab編程進(jìn)行BP神經(jīng)網(wǎng)絡(luò)預(yù)測時(shí),訓(xùn)練結(jié)果很多都是合適的,但如何確定最合適的?且如何用最合適的BP模型進(jìn)行外推預(yù)測?
2014-02-08 14:23:06
卷積神經(jīng)網(wǎng)絡(luò)(CNN)究竟是什么,鑒于神經(jīng)網(wǎng)絡(luò)在工程上經(jīng)歷了曲折的歷史,您為什么還會(huì)在意它呢? 對(duì)于這些非常中肯的問題,我們似乎可以給出相對(duì)簡明的答案。
2019-07-17 07:21:50
卷積神經(jīng)網(wǎng)絡(luò)模型發(fā)展及應(yīng)用轉(zhuǎn)載****地址:http://fcst.ceaj.org/CN/abstract/abstract2521.shtml深度學(xué)習(xí)是機(jī)器學(xué)習(xí)和人工智能研究的最新趨勢,作為一個(gè)
2022-08-02 10:39:39
卷積神經(jīng)網(wǎng)絡(luò)的層級(jí)結(jié)構(gòu) 卷積神經(jīng)網(wǎng)絡(luò)的常用框架
2020-12-29 06:16:44
反饋神經(jīng)網(wǎng)絡(luò)算法
2020-04-28 08:36:58
本文設(shè)計(jì)了一種基于神經(jīng)網(wǎng)絡(luò)控制算法的伺服運(yùn)動(dòng)控制卡。
2021-06-03 06:05:09
最近在學(xué)習(xí)電機(jī)的智能控制,上周學(xué)習(xí)了基于單神經(jīng)元的PID控制,這周研究基于BP神經(jīng)網(wǎng)絡(luò)的PID控制。神經(jīng)網(wǎng)絡(luò)具有任意非線性表達(dá)能力,可以通過對(duì)系統(tǒng)性能的學(xué)習(xí)來實(shí)現(xiàn)具有最佳組合的PID控制。利用BP
2021-09-07 07:43:47
FPGA實(shí)現(xiàn)神經(jīng)網(wǎng)絡(luò)關(guān)鍵問題分析基于FPGA的ANN實(shí)現(xiàn)方法基于FPGA的神經(jīng)網(wǎng)絡(luò)的性能評(píng)估及局限性
2021-04-30 06:58:13
基于LabVIEW的智能算法實(shí)例,包括bp神經(jīng)網(wǎng)絡(luò),PID控制,粒子群算法,模糊控制,小波去噪。適合相關(guān)從業(yè)人員交流學(xué)習(xí)
2020-03-07 20:08:27
巡線智能車控制中的CNN網(wǎng)絡(luò)有何應(yīng)用?嵌入式單片機(jī)中的神經(jīng)網(wǎng)絡(luò)該怎樣去使用?如何利用卷積神經(jīng)網(wǎng)絡(luò)去更好地控制巡線智能車呢?
2021-12-21 07:47:24
什么是同步檢測算法?如何去實(shí)現(xiàn)相位模糊估計(jì)的幀同步檢測算法?
2021-05-06 07:23:16
原文鏈接:http://tecdat.cn/?p=5725 神經(jīng)網(wǎng)絡(luò)是一種基于現(xiàn)有數(shù)據(jù)創(chuàng)建預(yù)測的計(jì)算系統(tǒng)。如何構(gòu)建神經(jīng)網(wǎng)絡(luò)?神經(jīng)網(wǎng)絡(luò)包括:輸入層:根據(jù)現(xiàn)有數(shù)據(jù)獲取輸入的層隱藏層:使用反向傳播優(yōu)化輸入變量權(quán)重的層,以提高模型的預(yù)測能力輸出層:基于輸入和隱藏層的數(shù)據(jù)輸出預(yù)測
2021-07-12 08:02:11
,并能在腦海中重現(xiàn)這些圖像信息,這不僅與人腦的海量信息存儲(chǔ)能力有關(guān),還與人腦的信息處理能力,包括數(shù)據(jù)壓縮能力有關(guān)。在各種神經(jīng)網(wǎng)絡(luò)中,多層前饋神經(jīng)網(wǎng)絡(luò)具有很強(qiáng)的信息處理能力,由于其采用BP算法,因此也
2019-08-08 06:11:30
譯者|VincentLee來源 |曉飛的算法工程筆記脈沖神經(jīng)網(wǎng)絡(luò)(Spiking neural network, SNN)將脈沖神經(jīng)元作為計(jì)算單...
2021-07-26 06:23:59
有提供編寫神經(jīng)網(wǎng)絡(luò)預(yù)測程序服務(wù)的嗎?
2011-12-10 13:50:46
求高手,基于labview的BP神經(jīng)網(wǎng)絡(luò)算法的實(shí)現(xiàn)過程,最好有程序哈,謝謝!!
2012-12-10 14:55:50
求大神給一個(gè)人工神經(jīng)網(wǎng)絡(luò)與遺傳算法的源代碼。
2016-04-19 17:15:29
請(qǐng)問用matlab編程進(jìn)行BP神經(jīng)網(wǎng)絡(luò)預(yù)測時(shí),訓(xùn)練結(jié)果很多都是合適的,但如何確定最合適的?且如何用最合適的BP模型進(jìn)行外推預(yù)測?
2014-02-08 14:19:12
針對(duì)模糊神經(jīng)網(wǎng)絡(luò)訓(xùn)練采用BP算法比較依賴于網(wǎng)絡(luò)的初始條件,訓(xùn)練時(shí)間較長,容易陷入局部極值的缺點(diǎn),利用粒子群優(yōu)化算法(PSO)的全局搜索性能,將PSO用于模糊神經(jīng)網(wǎng)絡(luò)的訓(xùn)練過程.由于基本PSO算法存在
2010-05-06 09:05:35
各位大神,請(qǐng)問有沒有編過模糊PID控制程序或神經(jīng)網(wǎng)絡(luò)控制程序?
2015-01-12 10:50:48
有沒有誰會(huì)小波神經(jīng)網(wǎng)絡(luò)預(yù)測算法的設(shè)計(jì)啊,需要在MATLAB里面實(shí)現(xiàn)的,這是其中一部分,但是在MATLAB里面實(shí)現(xiàn)不了,有誰會(huì)完整的程序設(shè)計(jì)嗎?著急啊,幫幫忙吧%%網(wǎng)絡(luò)初始化Load
2016-04-15 13:24:19
關(guān)于遺傳算法和神經(jīng)網(wǎng)絡(luò)的
2013-05-19 10:22:16
神經(jīng)網(wǎng)絡(luò)模糊系統(tǒng)及其在運(yùn)動(dòng)控制中的應(yīng)用是一本關(guān)于人工神經(jīng)網(wǎng)絡(luò)、模糊邏輯系統(tǒng),以及模糊神經(jīng)網(wǎng)絡(luò)研究成果的專著。作者在簡要介紹神經(jīng)網(wǎng)絡(luò)理論與模糊理論的基礎(chǔ)上,對(duì)人
2009-01-13 15:18:34 0
0 結(jié)合網(wǎng)絡(luò)入侵和主機(jī)入侵方面的檢測能力,構(gòu)建了基于智能體的分布式入侵檢測系統(tǒng)的體系結(jié)構(gòu)模型。重點(diǎn)討論了神經(jīng)網(wǎng)絡(luò)入侵檢測算法。針對(duì)傳統(tǒng)的BP網(wǎng)絡(luò)在入侵檢測應(yīng)用中學(xué)習(xí)
2009-03-02 21:58:5420 模糊模式識(shí)別是模糊集理論研究中的重要方向,神經(jīng)網(wǎng)絡(luò)是數(shù)據(jù)挖掘中的一種常用方法。超圓神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)時(shí)間和網(wǎng)絡(luò)模型理解性都優(yōu)于BP 神經(jīng)網(wǎng)絡(luò),它能以較少的數(shù)據(jù)量 蘊(yùn)涵
2009-06-01 16:46:5320 模糊神經(jīng)網(wǎng)絡(luò)提供了從人工神經(jīng)網(wǎng)絡(luò)中模糊規(guī)則的抽取。本文研究模糊神經(jīng)網(wǎng)絡(luò)的自適應(yīng)學(xué)習(xí)、規(guī)則插入和抽取及神經(jīng)-模糊推理的FuNN 模型。把遺傳算法作為系統(tǒng)模糊規(guī)則選擇的自
2009-06-06 13:45:4218 應(yīng)用仿人智能魯棒性高、能對(duì)付難控對(duì)象的控制特點(diǎn),結(jié)合模糊RBF 神經(jīng)網(wǎng)絡(luò)控制技術(shù),提出仿人模糊神經(jīng)網(wǎng)絡(luò)控制方法,對(duì)PID 控制器參數(shù)進(jìn)行優(yōu)化調(diào)節(jié)。該方法采用仿人智能的
2009-06-09 10:47:3617 根據(jù)神經(jīng)網(wǎng)絡(luò)的基本理論,研究了神經(jīng)網(wǎng)絡(luò)在電器設(shè)備中的應(yīng)用,提出了神經(jīng)網(wǎng)絡(luò)的分塊構(gòu)造方法和神經(jīng)網(wǎng)絡(luò)分塊學(xué)習(xí)算法,并通過實(shí)驗(yàn)?zāi)M達(dá)到實(shí)際要求。關(guān)鍵詞 神經(jīng)網(wǎng)絡(luò) 算法 權(quán)
2009-06-13 11:40:0310 本文采用基于模糊神經(jīng)網(wǎng)絡(luò)的控制器實(shí)現(xiàn)了對(duì)時(shí)滯系統(tǒng)的控制,采取模糊規(guī)則對(duì)輸出誤差進(jìn)行預(yù)測,預(yù)測中假設(shè)系統(tǒng)輸出變化較緩慢,以至可以忽略高次項(xiàng),得到的輸出誤差經(jīng)過神
2009-06-23 13:14:0010 提出一種新的基于隨機(jī)模糊神經(jīng)網(wǎng)絡(luò)的多傳感器狀態(tài)信息融合方法, 研究和比較了基于單值模糊神經(jīng)網(wǎng)絡(luò)和基于隨機(jī)模糊神經(jīng)網(wǎng)絡(luò)的雷達(dá)與紅外傳感器狀態(tài)信息融合。仿真結(jié)果表明,
2009-07-09 14:42:1610 設(shè)計(jì)并實(shí)現(xiàn)了神經(jīng)網(wǎng)絡(luò)和模糊邏輯相結(jié)合的綜合預(yù)測模型進(jìn)行短期電力負(fù)荷預(yù)測。由神經(jīng)網(wǎng)絡(luò)和模糊邏輯分別對(duì)基本負(fù)荷和受天氣、節(jié)假日影響的負(fù)荷進(jìn)行預(yù)測,使其在天氣突變
2009-08-14 15:51:1619 針對(duì)電動(dòng)汽車中無刷直流電機(jī)負(fù)載波動(dòng)較大的特點(diǎn),提出了4 層模糊神經(jīng)網(wǎng)絡(luò)模型,該模型融合了模糊邏輯和神經(jīng)網(wǎng)絡(luò)的長處,模糊推理和解模糊化均通過神經(jīng)網(wǎng)絡(luò)來實(shí)現(xiàn)。模糊
2009-08-21 09:26:5815 本文設(shè)計(jì)了一種基于自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)的變步長LMS算法,該算法采用了一種新的模糊控制規(guī)則,按照該規(guī)則改變LMS算法的步長。文章最后給出了非線性噪聲抵消的仿真結(jié)果。關(guān)
2009-08-27 11:42:577 神經(jīng)網(wǎng)絡(luò)等模型講義:在本講義中,我們將著重講述一些數(shù)學(xué)建模中常用的算法,包括神經(jīng)網(wǎng)絡(luò)算法、遺傳算法、模擬退火算法和模糊數(shù)學(xué)方法。用這些算法可以較容易地解決一些
2009-09-15 12:30:508 針對(duì)中長期負(fù)荷預(yù)測,本文將模糊理論與神經(jīng)網(wǎng)絡(luò)相結(jié)合,提出了基于高木-關(guān)野自適應(yīng)神經(jīng)網(wǎng)絡(luò)模糊推理系統(tǒng)的中長期負(fù)荷預(yù)測模型。該模型采取神經(jīng)網(wǎng)絡(luò)技術(shù)對(duì)模糊信息進(jìn)行處理
2009-12-18 16:48:046 應(yīng)用仿人智能魯棒性高、能對(duì)付難控對(duì)象的控制特點(diǎn),結(jié)合模糊RBF 神經(jīng)網(wǎng)絡(luò)控制技術(shù),提出仿人模糊神經(jīng)網(wǎng)絡(luò)控制方法,對(duì)PID 控制器參數(shù)進(jìn)行優(yōu)化調(diào)節(jié)。該方法采用仿人智能的
2009-12-19 11:50:0312 介紹了MATLAB軟件的仿真技術(shù)在神經(jīng)網(wǎng)絡(luò)一模糊控制電冰箱的仿真研究中的應(yīng)用,并用匯編語言編程實(shí)現(xiàn)了制冷目標(biāo)溫度和制冷過程的模糊控制,以及神經(jīng)網(wǎng)絡(luò)在預(yù)冷和化霜等智能控
2010-01-12 16:57:4234 提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)卡車路段行程時(shí)間實(shí)時(shí)預(yù)測模型,闡述了自適應(yīng)神經(jīng)網(wǎng)絡(luò)模糊系統(tǒng)(1BCDEFG< )<EH&IJKLCM<B 3NOOP 6QR<I<Q=< 7PME<S,1)367)網(wǎng)絡(luò)原理和方法對(duì)
2010-02-22 10:43:008 介紹了模糊綜合評(píng)判和人工神經(jīng)網(wǎng)絡(luò)原理,分析了一般BP神經(jīng)網(wǎng)絡(luò)在研究復(fù)雜性問題時(shí)存在的局限性,根據(jù)模糊人工神經(jīng)網(wǎng)絡(luò)模型的構(gòu)建方法,探討了該模型在礦井構(gòu)造定量評(píng)價(jià)
2010-02-22 10:45:398 交通流的預(yù)測是智能交通系統(tǒng)的重要技術(shù)之一,傳統(tǒng)的神經(jīng)網(wǎng)絡(luò)預(yù)測方法存在對(duì)初始網(wǎng)絡(luò)權(quán)值設(shè)置敏感、易陷入局部極小點(diǎn)、收斂速度慢等缺點(diǎn)。GABP神經(jīng)網(wǎng)絡(luò)是指在傳統(tǒng)的BP神經(jīng)網(wǎng)絡(luò)
2010-02-23 14:20:3622 在對(duì)裝備使用維修費(fèi)用分析的基礎(chǔ)上,利用聚類和模糊神經(jīng)網(wǎng)絡(luò)理論,建立了時(shí)間序列對(duì)象的預(yù)測模型,并應(yīng)用于裝備使用維修費(fèi)用的預(yù)測研究,從而探討了一條適合裝備使用維修
2010-03-01 13:58:017 模糊神經(jīng)網(wǎng)絡(luò)在GPS高程轉(zhuǎn)換中的應(yīng)用
摘要: 介紹了模糊神經(jīng)網(wǎng)絡(luò)基本原理和GPS 高程轉(zhuǎn)換方法, 采用模糊神經(jīng)網(wǎng)絡(luò)算法, 實(shí)現(xiàn)了GPS 高程轉(zhuǎn)換. 在用模糊神經(jīng)網(wǎng)絡(luò)進(jìn)
2010-04-26 11:27:2812
隨著智能信息技術(shù)的發(fā)展,模糊神經(jīng)網(wǎng)絡(luò)算法廣泛應(yīng)用于工業(yè)控制。但該算法尚未應(yīng)用于PLC。針對(duì)這種現(xiàn)狀,給出基于S7-200 PLC的模糊神經(jīng)網(wǎng)絡(luò)算法設(shè)計(jì)。利用模糊神經(jīng)
2010-12-24 16:55:1949 本文將一種新型的動(dòng)態(tài) 神經(jīng)網(wǎng)絡(luò) 結(jié)構(gòu)與傳統(tǒng)的基于狀態(tài)估計(jì)的故障檢測方法相結(jié)合, 提出了一種基于動(dòng)態(tài)神經(jīng)網(wǎng)絡(luò)的交通事件檢測算法。該網(wǎng)絡(luò)借鑒靜態(tài)BP 網(wǎng)絡(luò)的訓(xùn)練算法, 并針對(duì)其訓(xùn)
2011-07-26 15:36:3826 分析了負(fù)荷預(yù)測的基本概念,以及基于神經(jīng)網(wǎng)絡(luò)的預(yù)測原理中正向和逆向建模的基本結(jié)構(gòu),研究了聯(lián)想神經(jīng)網(wǎng)絡(luò)優(yōu)化算法。設(shè)計(jì)了電力系統(tǒng)負(fù)荷預(yù)測模型,并對(duì)系統(tǒng)進(jìn)行仿真測試,試驗(yàn)結(jié)果表
2012-02-10 16:59:0446 根據(jù)相空間重構(gòu)理論,提出了一種基于遺傳小波神經(jīng)網(wǎng)絡(luò)(GA-WNN)的混沌時(shí)間序列預(yù)測方法。根據(jù)takens理論,計(jì)算出相空間重構(gòu)所需延遲時(shí)間和嵌入維數(shù)。采用小波神經(jīng)網(wǎng)絡(luò)的構(gòu)造和算法,將遺傳算法用于
2015-12-24 15:43:109 模糊系統(tǒng)、模糊神經(jīng)網(wǎng)絡(luò)及應(yīng)用程序設(shè)計(jì)-上科。
2016-04-11 17:14:030 模糊控制與神經(jīng)網(wǎng)絡(luò)-北航,有需要的下來看看。
2016-04-11 17:33:160 基于小波包_神經(jīng)網(wǎng)絡(luò)的太陽逐時(shí)輻射預(yù)測_陳杰
2016-12-31 14:45:091 一種基于深度神經(jīng)網(wǎng)絡(luò)的基音檢測算法_曹猛
2017-01-07 19:08:430 BP神經(jīng)網(wǎng)絡(luò)在水質(zhì)參數(shù)預(yù)測中的應(yīng)用_張昕
2017-03-19 11:26:541 基于人工神經(jīng)網(wǎng)絡(luò)和粒子群算法的風(fēng)能預(yù)測模型_廖輝英
2017-03-16 10:19:420 基于可拓神經(jīng)網(wǎng)絡(luò)的火災(zāi)探測算法_閆浩
2017-03-19 19:28:030 針對(duì)BP神經(jīng)網(wǎng)絡(luò)風(fēng)速預(yù)測中存在的結(jié)構(gòu)不確定以及網(wǎng)絡(luò)過度擬合的問題,利用遺傳算法的全局搜索能力和模糊聚類算法的數(shù)據(jù)篩選能力,分別對(duì)BP神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)與數(shù)據(jù)進(jìn)行雙重優(yōu)化,提出了基于遺傳算法和聚類算法的改進(jìn)BP神經(jīng)網(wǎng)絡(luò)風(fēng)速預(yù)測方法,仿真表明,改進(jìn)風(fēng)速后的預(yù)測方法大大提高了風(fēng)速預(yù)測的準(zhǔn)確性。
2017-11-10 11:23:415 算法預(yù)測性能更優(yōu),使用梯度下降算法與遺傳算法混合對(duì)RBF神經(jīng)網(wǎng)絡(luò)進(jìn)行參數(shù)優(yōu)化,提高預(yù)測模型收斂效率。實(shí)例分析表明,使用本文研究的混合RBF神經(jīng)網(wǎng)絡(luò)預(yù)測模型的預(yù)測結(jié)果明顯優(yōu)于其他傳統(tǒng)的預(yù)測模型。同時(shí),在預(yù)測速度上也具有較大的
2017-11-22 15:54:547 為了提高徑向基函數(shù)RBF神經(jīng)網(wǎng)絡(luò)預(yù)測模型對(duì)短時(shí)交通流的預(yù)測準(zhǔn)確性,提出了一種基于改進(jìn)人工蜂群算法優(yōu)化RBF神經(jīng)網(wǎng)絡(luò)的短時(shí)交通流預(yù)測模型。利用改進(jìn)人工蜂群算法確定RBF網(wǎng)絡(luò)隱含層的中心值以及隱含層單元
2017-12-01 16:31:582 蛋白質(zhì)二級(jí)結(jié)構(gòu)預(yù)測是結(jié)構(gòu)生物學(xué)中的一個(gè)重要問題。針對(duì)八類蛋白質(zhì)二級(jí)結(jié)構(gòu)預(yù)測,提出了一種基于遞歸神經(jīng)網(wǎng)絡(luò)和前饋神經(jīng)網(wǎng)絡(luò)的深度學(xué)習(xí)預(yù)測算法。該算法通過雙向遞歸神經(jīng)網(wǎng)絡(luò)建模氨基酸間的局部和長程相互作用
2017-12-03 09:41:149 模糊神經(jīng)網(wǎng)絡(luò)就是模糊理論同神經(jīng)網(wǎng)絡(luò)相結(jié)合的產(chǎn)物,它匯集了神經(jīng)網(wǎng)絡(luò)與模糊理論的優(yōu)點(diǎn),集學(xué)習(xí)、聯(lián)想、識(shí)別、信息處理于一體。
2017-12-29 14:40:4047546 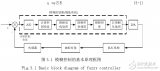
模糊神經(jīng)網(wǎng)絡(luò)是將人工神經(jīng)網(wǎng)絡(luò)與模糊邏輯系統(tǒng)相結(jié)合的一種具有強(qiáng)大的自學(xué)習(xí)和自整定功能的網(wǎng)絡(luò),是智能控制理論研究領(lǐng)域中一個(gè)十分活躍的分支,因此模糊神經(jīng)網(wǎng)絡(luò)控制的研究具有重要的意義。本文旨在分析模糊神經(jīng)網(wǎng)絡(luò)的優(yōu)缺點(diǎn)及其用途。
2017-12-29 15:35:3326481 網(wǎng)絡(luò)中心機(jī)房的溫度是大延時(shí)、大慣性的被控對(duì)象,針對(duì)此特點(diǎn),以模糊控制和神經(jīng)網(wǎng)絡(luò)結(jié)合的思想,設(shè)計(jì)了一種基于模糊神經(jīng)網(wǎng)絡(luò)的控制器。建立了以T-S模糊模型為基礎(chǔ)的5層模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),并采用改進(jìn)的BP算法
2018-01-09 16:04:090 針對(duì)傳統(tǒng)稅收預(yù)測模型精度較低的問題,提出一種將Adaboost算法和BP神經(jīng)網(wǎng)絡(luò)相結(jié)合進(jìn)行稅收預(yù)測的方法。該方法首先對(duì)歷年稅收數(shù)據(jù)進(jìn)行預(yù)處理并初始化測試數(shù)據(jù)分布權(quán)值;然后初始化BP神經(jīng)網(wǎng)絡(luò)權(quán)值和閾值
2018-02-27 16:51:440 Apollo 障礙物行為預(yù)測系統(tǒng)采用 MLP 多層感知機(jī)制,通過深度神經(jīng)網(wǎng)絡(luò)與規(guī)劃算法,達(dá)到精準(zhǔn)預(yù)測路徑的目的。
2018-12-18 09:54:448695 ,本文提出一種新的模糊神經(jīng)網(wǎng)絡(luò)算法,即在原有算法的基礎(chǔ)上引入時(shí)差法,該方法在某種程度上能實(shí)時(shí)地根據(jù)觀測數(shù)據(jù)和預(yù)測結(jié)果不斷調(diào)整模型參數(shù),使模型盡可能完善,從而提高預(yù)測精度。
2020-08-14 09:32:232741 
復(fù)雜網(wǎng)絡(luò)下的局部路徑鏈路預(yù)測算法
2021-06-09 15:33:0323 倒對(duì)于老年人來說是一個(gè)十分嚴(yán)重的問題,實(shí)時(shí)檢測老年人是否摔倒對(duì)于減輕摔倒造成的傷害具有重要意義。為此,文中提出了一種基于BP神經(jīng)網(wǎng)絡(luò)的摔倒檢測算法。該算法采用佩戴于腰部的六軸傳感器(MPU6050
2021-06-16 16:09:015 基于模糊RBF神經(jīng)網(wǎng)絡(luò)算法的灌溉控制系統(tǒng)
2021-06-29 14:25:290 基于果蠅算法的混合小波神經(jīng)網(wǎng)絡(luò)交通流預(yù)測模型
2021-07-05 16:52:5740 在介紹卷積神經(jīng)網(wǎng)絡(luò)之前,我們先回顧一下神經(jīng)網(wǎng)絡(luò)的基本知識(shí)。就目前而言,神經(jīng)網(wǎng)絡(luò)是深度學(xué)習(xí)算法的核心,我們所熟知的很多深度學(xué)習(xí)算法的背后其實(shí)都是神經(jīng)網(wǎng)絡(luò)。
2023-02-23 09:14:442256 卷積神經(jīng)網(wǎng)絡(luò)的介紹 什么是卷積神經(jīng)網(wǎng)絡(luò)算法 卷積神經(jīng)網(wǎng)絡(luò)涉及的關(guān)鍵技術(shù) 卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network,CNN)是一種用于圖像分類、物體識(shí)別、語音識(shí)別等領(lǐng)域
2023-08-21 16:49:461229 卷積神經(jīng)網(wǎng)絡(luò)算法是機(jī)器算法嗎? 卷積神經(jīng)網(wǎng)絡(luò)算法是機(jī)器算法的一種,它通常被用于圖像、語音、文本等數(shù)據(jù)的處理和分類。隨著深度學(xué)習(xí)的興起,卷積神經(jīng)網(wǎng)絡(luò)逐漸成為了圖像、語音等領(lǐng)域中最熱門的算法之一。 卷積
2023-08-21 16:49:48437 深度神經(jīng)網(wǎng)絡(luò)是一種基于神經(jīng)網(wǎng)絡(luò)的機(jī)器學(xué)習(xí)算法,其主要特點(diǎn)是由多層神經(jīng)元構(gòu)成,可以根據(jù)數(shù)據(jù)自動(dòng)調(diào)整神經(jīng)元之間的權(quán)重,從而實(shí)現(xiàn)對(duì)大規(guī)模數(shù)據(jù)進(jìn)行預(yù)測和分類。卷積神經(jīng)網(wǎng)絡(luò)是深度神經(jīng)網(wǎng)絡(luò)的一種,主要應(yīng)用于圖像和視頻處理領(lǐng)域。
2023-08-21 17:07:361867
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論