三自由度直升機(jī)的嵌入式控制系統(tǒng)
三自由度直升機(jī)可以應(yīng)用于飛行器控制系統(tǒng)的半實(shí)物仿真試驗和性能測試等場合,用以模擬橫列式直升機(jī),即傾轉(zhuǎn)旋翼機(jī)的直升機(jī)狀
2010-02-06 09:10:13 1238
1238 
六自由度電磁跟蹤系統(tǒng)根據(jù)電磁感應(yīng)的原理來計算出目標(biāo)的六個自由度參數(shù),從而唯一確定目標(biāo)的位置和姿態(tài)。怎樣由接收到的模擬信號計算得到目標(biāo)的位置和姿態(tài)參數(shù)是影響整個系統(tǒng)性能的關(guān)鍵所在。在一些早期的產(chǎn)品中對感應(yīng)天線接收信號的處理主要采用模擬電路和單
2011-01-25 00:11:021147 
3自由度自動控制機(jī)械手,試用好使!希望可以幫助到大家
2014-09-11 15:55:50
51/stm32單片機(jī)控制6自由度機(jī)械臂(帶云臺)二次開發(fā)是用什么傳感器定位比較好?
2017-03-31 09:13:37
`分享給大家我自己做的四自由度機(jī)械手`
2015-09-09 09:27:35
本人建立一個七自由度的整車模型,仿真時一直報錯,出現(xiàn)代數(shù)環(huán)的問題,歡迎小伙伴們來探討!我qq:1139471346
2016-11-22 12:54:59
到的不同文件。建立CMSIS、Library、Listing、Output、Project、User六個子目錄,如下圖所示。下面來講一下這六個子目錄的作用。C
2021-08-04 06:51:28
我得目的是讓六個帶有WiFi模塊的單片機(jī)跟一個配置為AP模式的單片機(jī)通信,六個之間并不通信這個過程絕不能涉及任何手機(jī)電腦路由器,不知道可不可以。想聽聽各位的的高見
2019-05-16 06:35:32
Processing?(運(yùn)動信號處理)技術(shù),集成3個陀螺儀和3個加速計,以提供6自由度運(yùn)動檢測。嵌入的精密自動調(diào)零,以及出眾的0.05o/sec/g動態(tài)線性加速補(bǔ)償因數(shù),使設(shè)計人員無需進(jìn)行進(jìn)一步的運(yùn)動測試即可實(shí)現(xiàn)
2018-11-16 15:56:38
相同的微機(jī)械加工制程。軟件和引腳兼容不久前推出的擁有5個自由度的LSM320DL模塊,因此客戶可直接進(jìn)行產(chǎn)品升級,進(jìn)而保護(hù)其在應(yīng)用研發(fā)的投資。文章來源于:華強(qiáng)電子網(wǎng)外貿(mào)通
2011-08-08 16:58:28
nrf24l01自身有六個通道,這里的通道是什么意思,是頻率的意思嗎
2020-06-16 07:52:52
nrf24l01自身有六個通道,這里的通道是什么意思,是頻率的意思嗎是不是只能六個頻率發(fā),1個頻率接收?
2020-06-18 09:00:33
nrf24l01自身有六個通道,這里的通道是什么意思,是頻率的意思嗎是不是只能六個頻率發(fā),1個頻率接收?
2017-03-02 16:25:14
想做一個感應(yīng)正方體音樂盒,通過三軸加速度計去感應(yīng)六個面的變化,從而去讀取sd不同文件夾的音樂,六個面對應(yīng)六個不同文件夾sd音樂,而且文件夾里面的音樂是可以換的,我知道單獨(dú)設(shè)置一個固定的歌曲是可以的,想問下sd可以實(shí)現(xiàn)這種文件夾的功能嗎?
2020-08-12 22:09:27
`申請理由:機(jī)智云GoKit這款開發(fā)套件內(nèi)部資源非常強(qiáng)大想用作為機(jī)械手主控驅(qū)動舵機(jī),制作成六自由度機(jī)械手,完成各種動作。項目描述:想用機(jī)智云GoKit驅(qū)動六軸智能機(jī)械手,初步計劃是用GoKit為主控,采用藍(lán)牙與主控通信,主控控制舵機(jī)驅(qū)動器,控制舵機(jī)驅(qū)動角度,完成抓持等一系列動作。`
2015-11-02 10:46:33
項目名稱:漁業(yè)衛(wèi)士-基于圖像識別的多自由度水下機(jī)器人試用計劃:1、申請理由希望早日接觸、應(yīng)用國產(chǎn)的鴻蒙系統(tǒng)。2、項目名稱漁業(yè)衛(wèi)士-基于圖像識別的多自由度水下機(jī)器人3、計劃(1)約三個月時間,應(yīng)用該款
2020-09-25 10:11:50
項目名稱:采用labview與FPGA的多自由度機(jī)械臂快速控制系統(tǒng)原型開發(fā)試用計劃: 機(jī)械臂在自動化工業(yè)中廣泛應(yīng)用,由于每個自由度都有一對驅(qū)動-傳感環(huán)節(jié),多自由度下各環(huán)節(jié)的配合,動作完成的一致性需要
2016-12-19 15:30:56
申請理由:本項目涉及視覺識別算法,串聯(lián)機(jī)構(gòu)正逆解,多種傳感器信息融合,電機(jī)控制等。擬采用高速dsp為硬件,解決上述問題項目描述:果實(shí)自動采摘三自由度串聯(lián)手臂的研制
2015-11-06 09:53:02
/joinXR806優(yōu)秀開發(fā)例程《基于OpenHarmony的棋子分揀機(jī)》《用全志XR806開源鴻蒙開發(fā)板做一個四足行走機(jī)器狗》《【XR806開發(fā)板實(shí)戰(zhàn)】輕松連上華為云實(shí)現(xiàn)物聯(lián)網(wǎng)》《在XR806開源鴻蒙開發(fā)板上移植LVGL》《在XR806上用ncnn跑神經(jīng)網(wǎng)絡(luò)mnist》
2022-02-28 17:39:32
/joinXR806優(yōu)秀開發(fā)例程《基于OpenHarmony的棋子分揀機(jī)》《用全志XR806開源鴻蒙開發(fā)板做一個四足行走機(jī)器狗》《【XR806開發(fā)板實(shí)戰(zhàn)】輕松連上華為云實(shí)現(xiàn)物聯(lián)網(wǎng)》《在XR806開源鴻蒙開發(fā)板上移植LVGL》《在XR806上用ncnn跑神經(jīng)網(wǎng)絡(luò)mnist》
2022-03-01 09:27:50
Arduino實(shí)現(xiàn))基于Arduino通過PS2無線手柄實(shí)現(xiàn)對小車方向控制和4自由度機(jī)械手任意角度控制從而實(shí)現(xiàn)指定地點(diǎn)指定物體的抓取1.Arduino開發(fā)環(huán)境搭建2.功能原理實(shí)現(xiàn)分析3.實(shí)現(xiàn)對履帶車
2015-08-04 23:05:28
如題,我在Labview里搭的二自由度車輛模型,給了一個角階躍信號,怎么出不來響應(yīng)圖啊
2015-07-29 14:04:20
最近在參與一個六個自由度座椅控制的課題,需要查閱哪些方面的相關(guān)書籍,有什么推薦嗎?謝謝各位
2017-01-13 14:46:46
``受大象鼻子啟發(fā),研制出的萬向自由度的機(jī)械臂,可以完成更柔性的工作``
2016-10-19 14:36:31
,省配線,不需要I/O模塊,使系統(tǒng)成本降低。機(jī)械臂為RV-3SQ系列六自由度機(jī)械臂,為執(zhí)行動作的單元,具體型號為RV-3SQ-S11。機(jī)械臂共六個關(guān)節(jié),每個關(guān)節(jié)內(nèi)有一個伺服電動機(jī),由絕對編碼器來檢測
2013-11-14 12:04:29
。出于操作便捷實(shí)用的考慮,設(shè)計腰部回轉(zhuǎn)、大臂俯仰、小臂俯仰、腕部回轉(zhuǎn)4 個自由度,整體采用重力方向折疊展開型結(jié)構(gòu),大臂俯仰與小臂俯仰為一組平面自由度。機(jī)械手臂主要通過鋼絲繩傳動機(jī)構(gòu),把小臂俯仰關(guān)節(jié)的電機(jī)
2015-02-12 16:10:04
一前言針對機(jī)器人相關(guān)專業(yè)的教學(xué)需求,商飛信息科技開發(fā)出此開源六自由度協(xié)作機(jī)器人實(shí)驗平臺。該平臺有以下幾大特色機(jī)器人本體采用自主設(shè)計的3Kg負(fù)載六自由度協(xié)作機(jī)器人,機(jī)器人每個關(guān)節(jié)集成電機(jī)、減速器和驅(qū)動
2021-09-07 07:10:14
六自由度Stewart并聯(lián)運(yùn)動平臺模型-X,Y,Z平移、旋轉(zhuǎn)測試六自由度Stewart并聯(lián)運(yùn)動平臺-Z向旋轉(zhuǎn)正弦波復(fù)現(xiàn)六自由度Stewart并聯(lián)運(yùn)動平臺-Z向平移正弦波復(fù)現(xiàn)
2014-04-16 23:25:51
Altium Designer 畫PCB的時候,如下圖所示,如何將六個圓孔內(nèi)部變?yōu)榭招牡模疽馐菐?b class="flag-6" style="color: red">六個洞洞的板子 求大神支招
2019-09-16 20:12:40
如圖,請問這種步進(jìn)電機(jī)的六個引腳分別是什么意思?為什么要這么接?
2015-11-06 17:27:32
怎么用LabVIEW自定義一個導(dǎo)彈(飛行器)的六自由度彈道仿真界面,使其能夠和simulink進(jìn)行聯(lián)合仿真,并且能夠在界面中顯示導(dǎo)彈打擊目標(biāo)的三維運(yùn)動曲線,有沒有做過的或者這方面比較牛的人給一些指點(diǎn),我是新手,LabVIEW不太懂,但是這個課程設(shè)計要的比較急,求幫助,我有彈道仿真simulink程序
2014-12-20 21:40:52
怎樣通過控制六個MOS來驅(qū)動直流無刷電機(jī)旋轉(zhuǎn)?
2021-07-20 06:25:17
最近閑來無事,接了一個畢業(yè)設(shè)計。對方設(shè)計要求用51實(shí)現(xiàn)一個4自由度的機(jī)械臂,實(shí)現(xiàn)簡單的物品抓取。先說說思路吧,這里主要就是通過兩個按鍵控制機(jī)械臂是從左向右抓取,還是從右向左抓取,對于舵機(jī)的控制,我們
2017-04-05 11:27:51
本人有義隆,合泰。中穎,PIC等六個仿真器低價處理,另有20m三星示波器一部,LM324芯片6000個,HT6222紅外遙控芯片(COB)20000個,穩(wěn)壓電源一臺,一同處理,超低價優(yōu)惠,感興趣請留言。
2016-11-07 19:44:07
求大神給個六個管子的數(shù)碼管原理圖及其封裝!!!請發(fā)到郵箱663948676@qq.com,就此謝過!!!!!!
2012-07-23 18:59:09
最近在學(xué)習(xí)前方電路,在一個電路模塊上發(fā)現(xiàn)有兩個芯片是六個接腳的,應(yīng)該是運(yùn)放芯片,上面只寫了H3H,也不知道是什么型號的
2019-08-24 17:34:32
我需要具有六個 usart 和 uart 的廉價微控制器。你有你的建議嗎?
2023-02-03 06:30:03
我們設(shè)計的四自由度機(jī)器人走一定距離會走偏,要求走四米的直線,偏差不能超過五厘米,而且還要轉(zhuǎn)彎后繼續(xù)走直線,請問有什么比較好用的傳感器可以既節(jié)省時間又可以讓行走偏差縮小。
2014-08-15 15:49:53
汽車駕駛模擬器二自由度運(yùn)動系統(tǒng)
2012-08-06 13:06:11
本人設(shè)計了用51設(shè)計了一個晾衣架,但是需要兩個自由度(前后和左右),得用兩個驅(qū)動模塊,用了一個后,發(fā)現(xiàn)單片機(jī)引腳不夠了,想請教一下有什么可以解決的辦法。
2019-03-02 14:07:29
更輕松。Dialog 將無線收發(fā)器和傳感器組合在專用模塊中,進(jìn)而獲得世界上功耗最低的 12 自由度 (DOF) 無線傳感器模塊。該模塊在縮減系統(tǒng)尺寸和成本的同時,還包含了用于加快物聯(lián)網(wǎng)系統(tǒng)開發(fā)的所有必要
2018-07-10 09:51:47
本帖最后由 ghb1986ghb 于 2012-11-14 16:10 編輯
請教一下,一個六個腳的芯片上面絲印字是AMBK,請問誰知道是什么芯片啊,先謝了啊 !!
2012-11-14 16:06:36
現(xiàn)在做的產(chǎn)品是利用陀螺儀做一個開關(guān),在掉落時做自由落體,當(dāng)作關(guān)閉。第一次接觸6050,不太懂,如果做自由落體時,是不是應(yīng)該六個壁面都沒受到壓力,加速度計采樣回來的數(shù)據(jù)都是零么?
2019-05-17 00:34:27
STSPIN32G4能否驅(qū)動六個獨(dú)立(單向)相位呢?有哪位大神可以解答一下呢
2023-01-04 06:40:57
積累和放大、位置反解容易等優(yōu)點(diǎn), 與串聯(lián)機(jī)構(gòu)在應(yīng)用上形成了互補(bǔ)關(guān)系。目前, 對并聯(lián)機(jī)器人研究較多的是6 自由度( 6DOF) 并聯(lián)機(jī)器人, 但在某些場合2~5 個自由度即可滿足使用要求, 這類少于6 自由度
2019-06-02 08:00:00
的LabVIEW8.2作為開發(fā)平臺,通過NI PCI-7344四軸運(yùn)動控制卡和多功能數(shù)據(jù)采集卡來實(shí)現(xiàn)對于機(jī)械臂四個自由度的驅(qū)動控制,同時利用LabVIEW8.2中新增Project文件管理功能和控制設(shè)計工具包實(shí)現(xiàn)控制軟件
2019-05-06 09:26:38
看到的全動飛行模擬器,其運(yùn)動系統(tǒng)具有六個自由度,即在三維坐標(biāo)中繞三個軸的轉(zhuǎn)動及沿三個軸的線位移,動筒的協(xié)同運(yùn)動,可驅(qū)動平臺并使座艙模擬出飛機(jī)的運(yùn)動變化情況,可完成升降,俯仰,轉(zhuǎn)向,偏航等動作。 六自由度
2020-09-07 17:20:34
提出一種單神經(jīng)元二自由度PID 控制方法,將前饋型二自由度PID 的五個參數(shù)分別對應(yīng)于單神經(jīng)元的五個權(quán)值,將二次型性能指標(biāo)Pe2 (k) + QΔu 2 (k)作為控制算法中加權(quán)系數(shù)學(xué)習(xí)的優(yōu)化
2009-08-27 08:35:37 11
11 新型三自由度碟型磁浮馬達(dá)特性量測與改善本計劃將針對本校電機(jī)系所研制之新型三自由度碟型磁浮馬達(dá)進(jìn)行特性量測與改善。此碟型磁浮馬達(dá)是由具有18 個E型硅鋼片之三相交流
2009-11-17 18:13:3238 針對二自由度PID 控制器參數(shù)整定困難的問題,提出了一種基于單親遺傳算法的二自由度參數(shù)整定方法。運(yùn)用該算法分別對單自由度PID 控制器和二自由度控制器進(jìn)行了整定,并與
2009-12-26 13:56:4223 GTS六自由度激光自動精準(zhǔn)跟蹤測量儀是高精度、便攜式的空間大尺寸坐標(biāo)測量機(jī),是同時具高精度(μm級)、大工作空間(百米級)的高性能光電測量儀器,被廣泛應(yīng)用在飛機(jī)、汽車、船舶、航天、機(jī)器人、核電
2023-10-12 09:26:16
中圖儀器牽頭的國家重點(diǎn)研發(fā)計劃——“六自由度激光自動精準(zhǔn)跟蹤測量關(guān)鍵技術(shù)"的項目綜合績效評價會議在深圳順利召開。本項目瞄準(zhǔn)我國航空航天、汽車船舶、軌道交通、機(jī)器人、核電、大科學(xué)裝置等裝備制造領(lǐng)域
2023-10-27 11:27:00
三自由度氣動機(jī)械手的PLC控制
一、實(shí)驗?zāi)康模和ㄟ^對一個三自由度氣動機(jī)械手的控制程序的設(shè)計,熟悉基于PLC的
2008-09-23 08:19:423146 針對典型的工業(yè)過程控制對象,提出了一種二自由度內(nèi)模控制方法,此方法可以使系統(tǒng)同時具有良好的目標(biāo)值跟蹤特性、干擾抑制特性和魯棒性,改進(jìn)了常規(guī)內(nèi)模控制的不足,而且控制算法簡
2011-05-23 15:12:4027 基于MSP430F149單片機(jī)設(shè)計了一種三自由度轉(zhuǎn)臺系統(tǒng)。在該系統(tǒng)中,利用旋轉(zhuǎn)編碼器的信息反饋,通過對電機(jī)的閉環(huán)控制,使三自由度轉(zhuǎn)臺能夠模擬飛機(jī)的飛行姿態(tài)。
2011-09-26 13:58:192288 
為了使六自由度機(jī)械臂完成特定的動作, 需要設(shè)計計算相應(yīng)的指令序列. 首先計算了機(jī)械臂位姿與指尖位置之間的關(guān)系公式, 然后針對機(jī)械臂的到達(dá)問題、沿曲線運(yùn)動問題和避障問題, 分別
2012-02-17 16:55:04193 臺燈是我們每個人夜晚學(xué)習(xí)看書的常用燈具,常見的臺燈雖然可以彎曲到一定的程度,但是有時還是不能夠滿足人們自由的需求。LED燈光之家這就是自由度非常高的LED臺燈,燈具模塊由
2012-07-19 10:10:313359 
關(guān)于汽車在點(diǎn)頭與沉浮兩個自由度方向的問題,利用simulink進(jìn)行求解。
2016-02-16 17:18:060 超聲波在六自由度測量定位系統(tǒng)中的應(yīng)用,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-05-04 14:37:530 19自由度機(jī)器人_動作例程,感興趣的小伙伴們可以瞧一瞧。
2016-11-17 18:35:231 二自由度行波型超聲波電機(jī)定子的優(yōu)化研究_傅平
2017-01-04 16:45:451 多自由度超聲電機(jī)驅(qū)動電路研究_朱華
2017-01-08 11:20:203 兩自由度直驅(qū)感應(yīng)電機(jī)優(yōu)化設(shè)計及特性分析_司紀(jì)凱
2017-01-08 11:28:380 基于模糊PD算法的三自由度機(jī)械臂遙操作雙邊控制_邱恒
2017-01-21 12:16:517 六自由度液壓運(yùn)動平臺的迭代學(xué)習(xí)控制_盧穎
2017-03-15 08:00:001 6自由度機(jī)器人 雙足竟步機(jī)器人研究報告 加代碼
2017-04-10 11:19:1266 理想的少自由度并聯(lián)機(jī)構(gòu)的所有分支最好具有完全相同的結(jié)構(gòu),保持結(jié)構(gòu)的對稱,以滿足各向同性的要求。以單開鏈支路為單元,提出了一種新型的對稱的少自由度的并聯(lián)機(jī)器人機(jī)構(gòu)。研究結(jié)果表明,該機(jī)構(gòu)的運(yùn)動平臺具有
2017-10-23 16:24:5015 機(jī)器人機(jī)構(gòu)能夠獨(dú)立運(yùn)動的關(guān)節(jié)數(shù)目,稱為機(jī)器人機(jī)構(gòu)的運(yùn)動自由度,簡稱自由度(Degree of Freedom),由DOF簡寫表示。
2018-01-17 10:03:2011466 現(xiàn)在用的最多的工業(yè)機(jī)器人,一般都是六軸的,但是最近推出來的人機(jī)協(xié)作機(jī)械臂,卻有7個自由度,一直想不明白為什么。直到最近看到知乎上的一個問題:人的手臂(腕關(guān)節(jié)到肩關(guān)節(jié))有幾個自由度?才發(fā)現(xiàn),原來
2018-02-07 15:40:2517441 
大多數(shù)無人機(jī)的旋翼都必須保持與地面平行,不過Voliro的原型機(jī)六個旋翼可以做出360° 的空中翻轉(zhuǎn),讓Voliro在空中也能做到12個自由度(DoF)飛行,看上去非常炫酷。
2018-07-20 08:29:002525 付出辛苦努力將Unity中的擴(kuò)展現(xiàn)實(shí)(XR)項目盡可能開發(fā)得栩栩如生,但是,您不想讓聲音也能令人身臨其境嗎?畢竟,用戶的眼睛陶醉于六個自由度(6DoF)的同時,他們的耳朵不也應(yīng)該享受同樣的快感嗎?用戶轉(zhuǎn)動頭部或眼睛時,游戲畫面看起來不同,那么,聲音也應(yīng)當(dāng)聽起來不一樣。
2019-03-17 09:43:45985 現(xiàn)在用的最多的工業(yè)機(jī)器人,一般都是六軸的,但是最近推出來的人機(jī)協(xié)作機(jī)械臂,卻有7個自由度,一直想不明白為什么。
2019-03-17 09:23:0225892 他們采用了一種MBDA之前在Simulink中已經(jīng)開發(fā)出來的6自由度火箭模型。 他們將此6自由度火箭模型與另一個MBDA團(tuán)隊在Simulink中開發(fā)的跟蹤天線控制器模型結(jié)合在一起。他們使用組合模型運(yùn)行蒙特卡羅模擬,并改進(jìn)系統(tǒng)的精度和帶寬要求。
2019-09-12 15:50:031680 我希望這些照片對您有所幫助組裝您的4自由度機(jī)械臂。
2019-10-09 11:52:039862 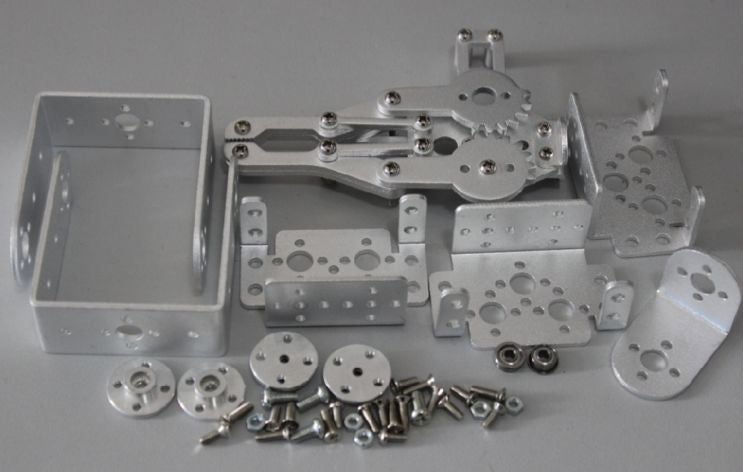
這是一款兼容Arduino的有6自由度傳感器擴(kuò)展板,它使用了一個ADXL345三軸加速器和一個ITG-3200三軸螺旋儀。
2019-11-27 15:35:541013 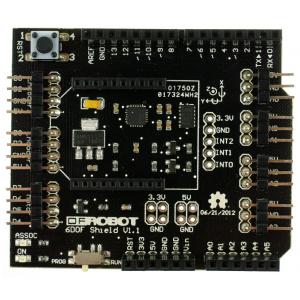
一款小型、性價比較高的6自由度機(jī)械臂 簡介 機(jī)械臂、機(jī)械手相信大家都不陌生了如醫(yī)院里的手術(shù)機(jī)械手、工廠里的工業(yè)機(jī)械手,但其龐大的身軀和高額的售價,使我們愛好者望而卻步,如今DFRobot開發(fā)了一款
2020-01-14 10:48:394405 
六自由度運(yùn)動平臺是典型的并聯(lián)運(yùn)動機(jī)構(gòu),由六支作動筒,上、下各六只萬向鉸鏈和上、下兩個平臺組成,下平臺固定在基礎(chǔ)上,借助六支作動筒的伸縮運(yùn)動,完成上平臺在空間六個自由度(X,Y,Z,α,β,γ)的運(yùn)動,從而可以模擬出各種空間運(yùn)動姿態(tài)。
2020-03-07 16:54:001244 ADIS16486:六自由度慣性傳感器數(shù)據(jù)表
2021-03-22 13:11:534 ADIS16407:十自由度慣性傳感器數(shù)據(jù)表
2021-05-09 18:03:099 ADIS16365:六自由度慣性傳感器數(shù)據(jù)表
2021-05-23 20:27:512 ADIS16489七自由度慣性傳感器數(shù)據(jù)表
2021-06-02 15:02:583 工業(yè)機(jī)器人自由度一般分為4個自由度,或者6個自由度,關(guān)節(jié)機(jī)器人主要是模仿人的手臂進(jìn)行設(shè)計的。
2023-03-16 12:20:301656 本文實(shí)例將實(shí)現(xiàn)2自由度并聯(lián)仿生腿模組運(yùn)動起來,模擬實(shí)現(xiàn)狗腿行走的動作。
2023-06-18 10:35:20296 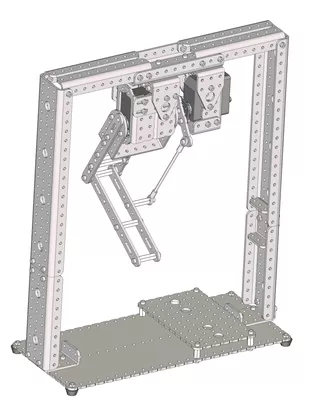
本文示例將實(shí)現(xiàn)4自由度并聯(lián)機(jī)器狗行走的功能。
2023-06-18 10:49:20466 
本期采用Simulink建立汽車2自由度動力學(xué)模型。為了便于掌握汽車穩(wěn)定性的基本特性,對汽車簡化為線性二自由度的汽車模型,忽略轉(zhuǎn)向系統(tǒng)的影響,直接一前輪轉(zhuǎn)角作為輸入;忽略懸架的作用,認(rèn)為汽車車廂只作用于地面的平面運(yùn)動。
2023-06-28 16:39:131102 
線性2自由度汽車模型是汽車操縱穩(wěn)定性分析中最簡單、最典型的模型。
2023-06-28 16:52:311167 
GTS6000激光跟蹤儀與空間姿態(tài)探頭配合組成六自由度激光跟蹤儀,能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復(fù)雜特征進(jìn)行快速、高精度的測量。
2023-07-21 10:58:58402 
激光跟蹤儀與空間姿態(tài)探頭(iProbe 6D姿態(tài)探頭)配合使用,就組成六自由度激光跟蹤儀。它能夠根據(jù)合作目標(biāo)的精確空間姿態(tài)對被測工件的內(nèi)部特征、隱藏特征或曲面等復(fù)雜特征進(jìn)行快速、高精度的測量。
2023-12-12 09:39:51307 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論