 電子發(fā)燒友App
電子發(fā)燒友App













 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻DSP仿人機(jī)器人運(yùn)動(dòng)控制器系統(tǒng)設(shè)計(jì)方案
2017-10-23 |
rar |
0.2 MB |
次下載 |
1積分
資料介紹
傳統(tǒng)的機(jī)器人運(yùn)動(dòng)控制器大部分是以嵌入式單片機(jī)為核心的,但其運(yùn)算速度和處理能力遠(yuǎn)不能滿足機(jī)器人控制系統(tǒng)飛速發(fā)展的需要,日益成為阻礙機(jī)器人技術(shù)進(jìn)步的瓶頸。隨著以電子計(jì)算機(jī)和數(shù)字電子技術(shù)為代表的現(xiàn)代高技術(shù)的不斷發(fā)展,尤其是高速度數(shù)字信號(hào)處理器DSP 的出現(xiàn),從根本上解決了嵌入式系統(tǒng)運(yùn)算能力不足的問(wèn)題,并為機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的改進(jìn)提供了新的途徑。該文正是從這一點(diǎn)出發(fā), 選用控制能力很強(qiáng)的DSP芯片TMS320LF2407A作為機(jī)器人運(yùn)動(dòng)控制器的主處理器,設(shè)計(jì)出一種高性能機(jī)器人運(yùn)動(dòng)控制器,顯著地提高了整個(gè)機(jī)器人的運(yùn)動(dòng)性能。
1 控制系統(tǒng)結(jié)構(gòu)
機(jī)器人的各種運(yùn)動(dòng)由各個(gè)關(guān)節(jié)軸系完成,機(jī)器人控制本質(zhì)上是對(duì)各關(guān)節(jié)軸系的控制。每個(gè)軸系具有一個(gè)自由度,可以完成某一方向的轉(zhuǎn)動(dòng)任務(wù),所有軸系同時(shí)協(xié)調(diào)運(yùn)動(dòng)就可以完成相對(duì)復(fù)雜的動(dòng)作。國(guó)防科技大學(xué)機(jī)電工程與自動(dòng)化學(xué)院機(jī)器人教研室最新研制的仿人步行機(jī)器人,其內(nèi)部各關(guān)節(jié)結(jié)構(gòu)如圖1所示。
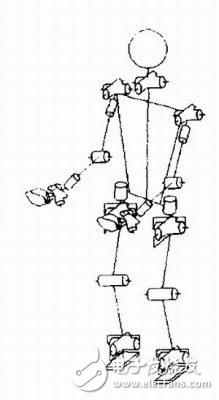
圖1 機(jī)器人內(nèi)部結(jié)構(gòu)示意圖
此機(jī)器人共有36 個(gè)自由度,分布在下肢、上肢、頭部和手指等各關(guān)節(jié)。所有軸系均由PWM 脈沖信號(hào)驅(qū)動(dòng)控制,運(yùn)動(dòng)控制系統(tǒng)的任務(wù)就是對(duì)這些關(guān)節(jié)軸系進(jìn)行控制,具體由各底層控制器實(shí)現(xiàn)。整個(gè)控制系統(tǒng)采用分布式控制,在結(jié)構(gòu)上可分為3 個(gè)層次,如圖2 所示。
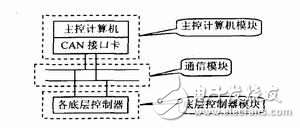
圖2 運(yùn)動(dòng)控制系統(tǒng)結(jié)構(gòu)框圖
1.1 主控計(jì)算機(jī)模塊
主控計(jì)算機(jī)就是控制系統(tǒng)的“大腦”和司令部,負(fù)責(zé)整個(gè)系統(tǒng)的在線運(yùn)動(dòng)規(guī)劃、動(dòng)作及運(yùn)動(dòng)控制、語(yǔ)音交互控制、視覺(jué)導(dǎo)引控制以及人機(jī)交互等功能。主控計(jì)算機(jī)要求體積小,運(yùn)算速度快,滿足機(jī)器人實(shí)時(shí)控制的要求,通常采用高性能小板工業(yè)控制計(jì)算機(jī)。它通過(guò)CAN 總線接口卡連接到通信總線上,與各底層控制器相連并交互信息。
1.2 通信模塊
機(jī)器人控制的信息量大,對(duì)通信方面的要求很高,要保證各種信息在控制系統(tǒng)中及時(shí)準(zhǔn)確的傳輸,通信工具的選擇十分重要,該文選用當(dāng)前流行的CAN 總線作為通信標(biāo)準(zhǔn)。CAN (Controller Area Net-work) 總線是應(yīng)用最為廣泛的一種現(xiàn)場(chǎng)總線,也是目前為止惟一有國(guó)際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線。相對(duì)于一般通信總線,它的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性,可以滿足文中的設(shè)計(jì)要求。具體連接方式為:主控計(jì)算機(jī)通過(guò)CAN 總線接口卡連接到總線上,各底層控制器通過(guò)總線收發(fā)器掛接到總線上。只要所有器件都遵守相同的通信協(xié)議,就可以穩(wěn)定可靠的進(jìn)行信息傳輸。
1.3 底層控制器模塊
控制器處于整個(gè)控制系統(tǒng)的最底層,主要用來(lái)控制各運(yùn)動(dòng)關(guān)節(jié)軸系的具體執(zhí)行過(guò)程。控制器接收主控計(jì)算機(jī)的控制命令對(duì)各關(guān)節(jié)執(zhí)行軸系進(jìn)行控制,同時(shí)把底層信息反饋給主控計(jì)算機(jī),實(shí)現(xiàn)大回路反饋,便于主控計(jì)算機(jī)協(xié)調(diào)規(guī)劃,統(tǒng)一管理。控制器是整個(gè)控制系統(tǒng)的核心,也是該文研究的重點(diǎn),它的性能直接關(guān)系到機(jī)器人運(yùn)動(dòng)能力。
1 控制系統(tǒng)結(jié)構(gòu)
機(jī)器人的各種運(yùn)動(dòng)由各個(gè)關(guān)節(jié)軸系完成,機(jī)器人控制本質(zhì)上是對(duì)各關(guān)節(jié)軸系的控制。每個(gè)軸系具有一個(gè)自由度,可以完成某一方向的轉(zhuǎn)動(dòng)任務(wù),所有軸系同時(shí)協(xié)調(diào)運(yùn)動(dòng)就可以完成相對(duì)復(fù)雜的動(dòng)作。國(guó)防科技大學(xué)機(jī)電工程與自動(dòng)化學(xué)院機(jī)器人教研室最新研制的仿人步行機(jī)器人,其內(nèi)部各關(guān)節(jié)結(jié)構(gòu)如圖1所示。
圖1 機(jī)器人內(nèi)部結(jié)構(gòu)示意圖
此機(jī)器人共有36 個(gè)自由度,分布在下肢、上肢、頭部和手指等各關(guān)節(jié)。所有軸系均由PWM 脈沖信號(hào)驅(qū)動(dòng)控制,運(yùn)動(dòng)控制系統(tǒng)的任務(wù)就是對(duì)這些關(guān)節(jié)軸系進(jìn)行控制,具體由各底層控制器實(shí)現(xiàn)。整個(gè)控制系統(tǒng)采用分布式控制,在結(jié)構(gòu)上可分為3 個(gè)層次,如圖2 所示。
圖2 運(yùn)動(dòng)控制系統(tǒng)結(jié)構(gòu)框圖
1.1 主控計(jì)算機(jī)模塊
主控計(jì)算機(jī)就是控制系統(tǒng)的“大腦”和司令部,負(fù)責(zé)整個(gè)系統(tǒng)的在線運(yùn)動(dòng)規(guī)劃、動(dòng)作及運(yùn)動(dòng)控制、語(yǔ)音交互控制、視覺(jué)導(dǎo)引控制以及人機(jī)交互等功能。主控計(jì)算機(jī)要求體積小,運(yùn)算速度快,滿足機(jī)器人實(shí)時(shí)控制的要求,通常采用高性能小板工業(yè)控制計(jì)算機(jī)。它通過(guò)CAN 總線接口卡連接到通信總線上,與各底層控制器相連并交互信息。
1.2 通信模塊
機(jī)器人控制的信息量大,對(duì)通信方面的要求很高,要保證各種信息在控制系統(tǒng)中及時(shí)準(zhǔn)確的傳輸,通信工具的選擇十分重要,該文選用當(dāng)前流行的CAN 總線作為通信標(biāo)準(zhǔn)。CAN (Controller Area Net-work) 總線是應(yīng)用最為廣泛的一種現(xiàn)場(chǎng)總線,也是目前為止惟一有國(guó)際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線。相對(duì)于一般通信總線,它的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性,可以滿足文中的設(shè)計(jì)要求。具體連接方式為:主控計(jì)算機(jī)通過(guò)CAN 總線接口卡連接到總線上,各底層控制器通過(guò)總線收發(fā)器掛接到總線上。只要所有器件都遵守相同的通信協(xié)議,就可以穩(wěn)定可靠的進(jìn)行信息傳輸。
1.3 底層控制器模塊
控制器處于整個(gè)控制系統(tǒng)的最底層,主要用來(lái)控制各運(yùn)動(dòng)關(guān)節(jié)軸系的具體執(zhí)行過(guò)程。控制器接收主控計(jì)算機(jī)的控制命令對(duì)各關(guān)節(jié)執(zhí)行軸系進(jìn)行控制,同時(shí)把底層信息反饋給主控計(jì)算機(jī),實(shí)現(xiàn)大回路反饋,便于主控計(jì)算機(jī)協(xié)調(diào)規(guī)劃,統(tǒng)一管理。控制器是整個(gè)控制系統(tǒng)的核心,也是該文研究的重點(diǎn),它的性能直接關(guān)系到機(jī)器人運(yùn)動(dòng)能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 基于SSVEP仿人机器人异步脑机接口控制系统0次下载
- 基于仿尺蠖式运动的输电线路巡检机器人5次下载
- 基于DSP控制器的油气安全智能巡检机器人42次下载
- 基于DSP的排险机器人车体控制系统14次下载
- 基于DSP的高压训线机器人数字化控制器11次下载
- 如何实现双足步行机器人系统设计与运动控制及虚拟现实的仿真研究20次下载
- ARM嵌入式系统的拟人机器人控制器的设计12次下载
- 仿人机器人驱动和感知系统的介绍及关节控制器的控制算法分析20次下载
- 仿人机器人混联灵巧手臂设计及运动学逆解研究_秦利0次下载
- 基于DSP的双足机器人运动控制系统设计介绍47次下载
- 仿人机器人复杂动作设计中人——体运动数据提取及分析方法(1)2次下载
- 一种基于DSP的移动机器人运动控制器设计77次下载
- 仿人机器人足部姿态实时感知系统37次下载
- 仿人机器人控制系统研究及其关节控制器设计24次下载
- 小型仿人机器人控制系统设计45次下载
- 运动控制和机器人系统有什么区别1098次阅读
- 运动控制系统的核心应用2771次阅读
- 基于Memolink通讯实现机器人视觉跟踪系统的设计3431次阅读
- 基于仿人机器人的多功能通用型控制系统的设计2530次阅读
- 基于仿人机器人BHR-1的视觉跟踪和运动控制系统的设计3278次阅读
- 基于PIC单片机和PSC控制器实现机器人控制系统的设计4547次阅读
- 焊接机器人控制器的作用7905次阅读
- 机器人控制器有哪些类型_机器人控制器发展12554次阅读
- 移动机器人控制系统设计与仿真3954次阅读
- 如何利用减速器替代电机转速控制机器人运动4979次阅读
- 浅析运动控制和机器人系统的区别7229次阅读
- 仿人机器人关键技术研究5775次阅读
- 基于PLC的机器人伺服运动控制系统设计详解16716次阅读
- 仿人型机器人控制系统设计的几个问题3413次阅读
- 基于DSP的覆冰机器人控制系统研究759次阅读
 上傳資料賺積分
上傳資料賺積分 广告![]()
下載排行
本周
- 1電子電路原理第七版PDF電子教材免費(fèi)下載
- 0.00 MB | 1489次下載 | 免費(fèi)
- 2單片機(jī)典型實(shí)例介紹
- 18.19 MB | 91次下載 | 1 積分
- 3S7-200PLC編程實(shí)例詳細(xì)資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識(shí)別和講解說(shuō)明
- 4.28 MB | 18次下載 | 4 積分
- 5開(kāi)關(guān)電源原理及各功能電路詳解
- 0.38 MB | 9次下載 | 免費(fèi)
- 6基于AT89C2051/4051單片機(jī)編程器的實(shí)驗(yàn)
- 0.11 MB | 4次下載 | 免費(fèi)
- 7基于單片機(jī)和 SG3525的程控開(kāi)關(guān)電源設(shè)計(jì)
- 0.23 MB | 3次下載 | 免費(fèi)
- 8基于單片機(jī)的紅外風(fēng)扇遙控
- 0.23 MB | 3次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費(fèi)
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費(fèi)
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費(fèi)
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費(fèi)
- 6接口電路圖大全
- 未知 | 30319次下載 | 免費(fèi)
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費(fèi)
- 8開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21539次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537791次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233045次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191183次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183277次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138039次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論