 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
運動控制技術是數控機床的關鍵技術,其技術水平的高低將直接影響一個國家裝備制造業的發展水平。目前,多軸伺服控制器越來越多地運用在運動控制系統中,具有較高的集成度和靈活性,可實時完成運動控制過程中復雜的邏輯處理和控制算法,能實現多軸高速高精度的伺服控制。本文選用DSP與FPGA作為運動控制器的核心部件,設計了通用型運動控制器。其中DSP用于運動軌跡規劃、速度控制及位置控制等功能;FPGA完成運動控制器的精插補功能,用于精確計算步進電機或伺服驅動元件的控制脈沖,同時接收并處理脈沖型位置反饋信號。本文對該運動控制器的總體結構、硬件設計和軟件設計進行了描述。
1 系統總體設計
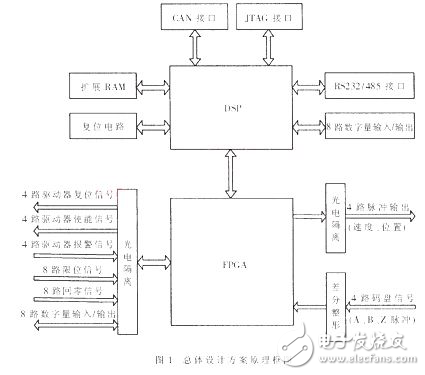
運動控制器的總體性能指標為:作為一個單獨的運動控制器使用,控制信號采用數字量方式輸出,能控制四軸的伺服電機;最高脈沖輸出頻率為4MP/s,能處理的編碼器反饋信號最高頻率為4MP/s;能接收和處理4路編碼器反饋信號;可以處理原點信號、正負方向信號、到位信號以及急停信號等數字量輸入信號;提供16路數字量輸出信號和16路數字量輸入信號接口。運動控制器采用DSP與FPGA芯片作為主控芯片,主要包括DSP模塊、FPGA模塊、FPGA外圍電路模塊和數字量輸入輸出接口模塊。
采用基于DSP與FPGA的運動控制器,能夠實時完成復雜的軌跡運算,而且利用DSP的高速數字信號處理功能和FPGA功耗低、主頻高的優點,能充分顯示該運動控制器的優點。采用DSP與FPGA相結合的運動控制器可以方便地對系統的控制策略進行修改,對控制參數進行修正,并可使設備具有良好的可靠性、可維修性,而且還降低了成本。系統還可以采用更多的智能控制策略,結構靈活,有較強的通用性,適合于模塊化設計,能夠提高算法效率,且易于維護和擴展。總體設計方案原理框圖如圖1所示。
2 系統硬件設計
2.1 DSP模塊
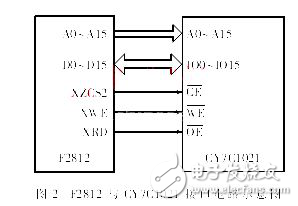
本控制器采用TI公司的TMS320F2812為主控芯片,它是32位的控制專用DSP,內含FLASH,主頻高達150 MHz,具有數字信號處理、事件管理和嵌入式控制功能,適用于大批量數據處理的場合。
選用TI公司生產的TPS767D318芯片來實現TMS320F2812的電源設計,將5 V電源分別轉換為3.3 V和1.8 V。SRAM是DSP常用的外圍存儲器,它具有接口簡單、讀寫速度快等優點,所以選擇大小為64 KB的隨機存儲器CY7C1021作為存儲器擴展芯片。DSP F2812與CY7C1021接口電路如圖2所示。
1 系統總體設計
運動控制器的總體性能指標為:作為一個單獨的運動控制器使用,控制信號采用數字量方式輸出,能控制四軸的伺服電機;最高脈沖輸出頻率為4MP/s,能處理的編碼器反饋信號最高頻率為4MP/s;能接收和處理4路編碼器反饋信號;可以處理原點信號、正負方向信號、到位信號以及急停信號等數字量輸入信號;提供16路數字量輸出信號和16路數字量輸入信號接口。運動控制器采用DSP與FPGA芯片作為主控芯片,主要包括DSP模塊、FPGA模塊、FPGA外圍電路模塊和數字量輸入輸出接口模塊。
采用基于DSP與FPGA的運動控制器,能夠實時完成復雜的軌跡運算,而且利用DSP的高速數字信號處理功能和FPGA功耗低、主頻高的優點,能充分顯示該運動控制器的優點。采用DSP與FPGA相結合的運動控制器可以方便地對系統的控制策略進行修改,對控制參數進行修正,并可使設備具有良好的可靠性、可維修性,而且還降低了成本。系統還可以采用更多的智能控制策略,結構靈活,有較強的通用性,適合于模塊化設計,能夠提高算法效率,且易于維護和擴展。總體設計方案原理框圖如圖1所示。
2 系統硬件設計
2.1 DSP模塊
本控制器采用TI公司的TMS320F2812為主控芯片,它是32位的控制專用DSP,內含FLASH,主頻高達150 MHz,具有數字信號處理、事件管理和嵌入式控制功能,適用于大批量數據處理的場合。
選用TI公司生產的TPS767D318芯片來實現TMS320F2812的電源設計,將5 V電源分別轉換為3.3 V和1.8 V。SRAM是DSP常用的外圍存儲器,它具有接口簡單、讀寫速度快等優點,所以選擇大小為64 KB的隨機存儲器CY7C1021作為存儲器擴展芯片。DSP F2812與CY7C1021接口電路如圖2所示。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 嵌入式ARM開發教程之ARM9微控制器LPC3180的軟硬件平臺的設計
- 基于FPGA芯片的軟硬件平臺的使用 20次下載
- 基于DSP的矢量控制系統的分析與實現 29次下載
- 基于DSP/FPGA的以太網控制器的設計方案 7次下載
- 磁鐵電源控制器的設計方案分析 0次下載
- IEEE1394視頻視覺系統中DSP軟硬件設計分析 0次下載
- 基于DSP與FPGA的運動控制器設計 30次下載
- 基于FPGA的無人機控制器設計與實現 212次下載
- 一種基于DSP的移動機器人運動控制器設計 77次下載
- 基于DSP與FPGA的運動控制器研究 93次下載
- 基于DSP+FPGA的磁鐵電源控制器的設計 36次下載
- FPGA-SoPC軟硬件協同設計 41次下載
- 基于DSP的OLED顯示器軟硬件設計及實現 86次下載
- 基于DSP的電源控制系統的軟硬件開發
- 基于SOC 的VC-1解碼器軟硬件協同設計及驗證
- 全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發 737次閱讀
- 軟硬件融合的概念和內涵 1118次閱讀
- 汽車控制器的硬件學習指南 932次閱讀
- 全國產EtherCAT運動控制邊緣控制器-ZMC432H 670次閱讀
- 基于ARM與DSP的嵌入式運動控制器設計詳解 7265次閱讀
- 基于FPGA的視頻圖像畫面分割器的軟硬件設計與實現 3391次閱讀
- 基于CPLD的開放式四軸運動控制器的硬件、軟件設計 1959次閱讀
- 什么是運動控制器_運動控制器的工作原理及應用 3.6w次閱讀
- CAN總線實現運動控制系統網絡化的軟硬件設計 3291次閱讀
- 基于FPGA的軟硬件協同仿真加速技術 5077次閱讀
- 基于K60的氙燈電源控制系統設計方案 4054次閱讀
- 基于FPGA的數字核脈沖分析器硬件設計方案 2075次閱讀
- 基于FPGA的SPI Flash控制器的設計方案 5963次閱讀
- 基于嵌入式Linux流媒體播放器系統軟硬件解決方案 2740次閱讀
- 基于DSP的覆冰機器人控制系統研究 603次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1489次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 91次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關電源原理及各功能電路詳解
- 0.38 MB | 9次下載 | 免費
- 6基于AT89C2051/4051單片機編程器的實驗
- 0.11 MB | 4次下載 | 免費
- 7基于單片機和 SG3525的程控開關電源設計
- 0.23 MB | 3次下載 | 免費
- 8基于單片機的紅外風扇遙控
- 0.23 MB | 3次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應用800例(新編版)
- 0.00 MB | 33562次下載 | 免費
- 6接口電路圖大全
- 未知 | 30319次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關電源設計實例指南
- 未知 | 21539次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537791次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233045次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183277次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網監
工商網監
評論