 電子發燒友App
電子發燒友App













 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
近兩年來,在公共場合常常能見到一種叫做體感車(或者叫平衡電動車)的代步工具,由于其便捷靈活,使得其頗為流行,并被稱為“最后一公里神器”。其運作原理主要是建立在一種被稱為“動態穩定”的基本原理上,也就是車輛本身的自動平衡能力。以內置的精密固態陀螺儀來判斷車身所處的姿勢狀態,透過精密且高速的中央微處理器計算出適當的指令后,驅動馬達來做到平衡的效果。
下文采用AVR Atmega16芯片作為主控制芯片,設計制作了兩輪的自平衡電動車。文中分析了測量角度和角速度傳感器的選擇,通過Atmega16單片機多路信號AD采集陀螺儀和加速度計的信號,經過Kalman濾波算法計算動態的角度和角速度,通過LCD1602顯示角速度和角度的值、轉向值。利用PID控制算法控制自平衡車的平衡狀態,使車體在平衡位置穩定。利用大功率MOS管設計驅動電路,通過單片機有效地控制電機的轉速、電機的轉向,從而有效地控制自平衡車的前進、后退及轉彎功能。我們來看看具體的設計細節吧。
1研究意義
隨著科學技術水平的不斷進步,交通工具正朝著小型、節能、環保的方向發展,“電動車”正是在這個背景下孕育而生并為人們所熟識。據不完全統計,我國的電動車保有量已超過1.2億輛,是增長速度最快的交通工具。隨著石油儲量的不斷減少和人們環保意識的增強,“電動車”無疑將成為未來交通工具的主力軍。就目前而言,電動車的種類主要有電動自行車、電動摩托車和電動汽車。由于電動機制造水平的提高,尤其是大功率直流無刷電動機制造工藝的成熟,帶動了電動自行車和電動摩托車行業的飛速發展。同時,人們也根據兩輪自平衡機器人工作原理,設計出了一些新式電動車——兩輪自平衡電動車。它是一種新型的交通工具,它一改電動自行車和摩托車車輪前后排列方式,而是采用兩輪并排固定的方式,這種結構將給人們帶來一種全新的駕馭感受。兩輪自平衡電動車僅靠兩個輪子支撐車體,采用蓄電池提供動力,由電動機驅動,采用微處理器、姿態感知系統、控制算法及車體機械裝置共同協調控制車體的平衡,僅靠人體重心的改變便可以實現車輛的啟動、加速、減速、停止等功能。兩輪自平衡車主要是綠色環保。電動車使用電池作為動力能源,并可以反復充電使用,大大減少了對環境的污染。轉彎半徑為零,在小空間范圍內可以靈活運動。無剎車系統,由CPU自動給出正反轉力矩,從而達到快速穩定的剎車效果。
控制極其方便,前進后退自如。兩輪自平衡電動車是一個高度不穩定的系統,其動力學方程是一多變量、嚴重不穩定、耦合、時變、參數不確定性的非線性高階方程,加上運動學方程中的非完整性約束,要求完成的控制任務也具有多重性,因此,兩輪自平衡電動車作為一個具體的復雜系統,給控制理論提出了很大的挑戰,是檢驗各種控制方法處理能力的典型裝置。兩輪自平衡電動車作為一種研究裝置,可進行不確定性系統控制、非線性系統控制、自適應控制、智能控制等研究。
2系統總體設計方案
兩輪自平衡自動車采用AVR Atmega16芯片作為主控制芯片,選擇外部16 MHz晶振,使用JTAG仿真器進行實時仿真與調試;采用LCD1602顯示轉彎角度傳感器測量的動態角度和角速度,為了讓調試的過程中更加直觀。動態角度和角速度的測量通過陀螺儀測量角速度,三軸加速度計測量角度。由于平衡車是運動的,所以三軸加速度計測量的角度里面參雜動態角度,最終通過卡爾曼硬件融合電路精確地測量出動態的角度和角速度。轉向模塊采用高精度電位器,當手把向右偏轉時,兩輪車向右轉,當手把向左偏轉時兩輪自平衡車向左轉彎,可以實現原地轉彎。電機采用直流減速電機,主要是因為直流減速電機能耗低、性能優越、減速機效率高達95%以上,而且振動小、噪音低、節能高、選用優質段鋼材料,鋼性鑄鐵箱體,齒輪表面經過高頻熱處理。節省空間,可靠耐用,承受過載能力高,經過精密加工,確保定位精度,扭矩大。電機驅動模塊采用大功率MOS管,由于電機的功率大,需要的電流大。電機的轉動通過PID控制算法,實現兩輪車的自平衡狀態。系統簡易硬件結構框圖如圖1所示。
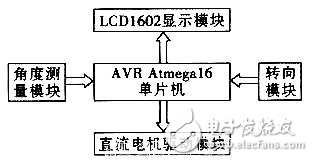
圖1系統簡易硬件結構框圖
下文采用AVR Atmega16芯片作為主控制芯片,設計制作了兩輪的自平衡電動車。文中分析了測量角度和角速度傳感器的選擇,通過Atmega16單片機多路信號AD采集陀螺儀和加速度計的信號,經過Kalman濾波算法計算動態的角度和角速度,通過LCD1602顯示角速度和角度的值、轉向值。利用PID控制算法控制自平衡車的平衡狀態,使車體在平衡位置穩定。利用大功率MOS管設計驅動電路,通過單片機有效地控制電機的轉速、電機的轉向,從而有效地控制自平衡車的前進、后退及轉彎功能。我們來看看具體的設計細節吧。
1研究意義
隨著科學技術水平的不斷進步,交通工具正朝著小型、節能、環保的方向發展,“電動車”正是在這個背景下孕育而生并為人們所熟識。據不完全統計,我國的電動車保有量已超過1.2億輛,是增長速度最快的交通工具。隨著石油儲量的不斷減少和人們環保意識的增強,“電動車”無疑將成為未來交通工具的主力軍。就目前而言,電動車的種類主要有電動自行車、電動摩托車和電動汽車。由于電動機制造水平的提高,尤其是大功率直流無刷電動機制造工藝的成熟,帶動了電動自行車和電動摩托車行業的飛速發展。同時,人們也根據兩輪自平衡機器人工作原理,設計出了一些新式電動車——兩輪自平衡電動車。它是一種新型的交通工具,它一改電動自行車和摩托車車輪前后排列方式,而是采用兩輪并排固定的方式,這種結構將給人們帶來一種全新的駕馭感受。兩輪自平衡電動車僅靠兩個輪子支撐車體,采用蓄電池提供動力,由電動機驅動,采用微處理器、姿態感知系統、控制算法及車體機械裝置共同協調控制車體的平衡,僅靠人體重心的改變便可以實現車輛的啟動、加速、減速、停止等功能。兩輪自平衡車主要是綠色環保。電動車使用電池作為動力能源,并可以反復充電使用,大大減少了對環境的污染。轉彎半徑為零,在小空間范圍內可以靈活運動。無剎車系統,由CPU自動給出正反轉力矩,從而達到快速穩定的剎車效果。
控制極其方便,前進后退自如。兩輪自平衡電動車是一個高度不穩定的系統,其動力學方程是一多變量、嚴重不穩定、耦合、時變、參數不確定性的非線性高階方程,加上運動學方程中的非完整性約束,要求完成的控制任務也具有多重性,因此,兩輪自平衡電動車作為一個具體的復雜系統,給控制理論提出了很大的挑戰,是檢驗各種控制方法處理能力的典型裝置。兩輪自平衡電動車作為一種研究裝置,可進行不確定性系統控制、非線性系統控制、自適應控制、智能控制等研究。
2系統總體設計方案
兩輪自平衡自動車采用AVR Atmega16芯片作為主控制芯片,選擇外部16 MHz晶振,使用JTAG仿真器進行實時仿真與調試;采用LCD1602顯示轉彎角度傳感器測量的動態角度和角速度,為了讓調試的過程中更加直觀。動態角度和角速度的測量通過陀螺儀測量角速度,三軸加速度計測量角度。由于平衡車是運動的,所以三軸加速度計測量的角度里面參雜動態角度,最終通過卡爾曼硬件融合電路精確地測量出動態的角度和角速度。轉向模塊采用高精度電位器,當手把向右偏轉時,兩輪車向右轉,當手把向左偏轉時兩輪自平衡車向左轉彎,可以實現原地轉彎。電機采用直流減速電機,主要是因為直流減速電機能耗低、性能優越、減速機效率高達95%以上,而且振動小、噪音低、節能高、選用優質段鋼材料,鋼性鑄鐵箱體,齒輪表面經過高頻熱處理。節省空間,可靠耐用,承受過載能力高,經過精密加工,確保定位精度,扭矩大。電機驅動模塊采用大功率MOS管,由于電機的功率大,需要的電流大。電機的轉動通過PID控制算法,實現兩輪車的自平衡狀態。系統簡易硬件結構框圖如圖1所示。
圖1系統簡易硬件結構框圖
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 两轮电动车系统介绍与THVD8000在两轮电动车上的应用1次下载
- 常见的电动两轮车BMS架构应用说明4次下载
- 采用ATMEGA16的两轮自平衡电动车设计0次下载
- 进阶的电动两轮车——更低成本,更高性能的BMS解决方案4次下载
- 基于卡尔曼滤波的两轮平衡检测系统16次下载
- 基于单片机的两轮自动平衡小车的设计44次下载
- 使用PID设计两轮智能平衡小车的资料合集35次下载
- STM32的两轮平衡小车源代码64次下载
- 两轮自平衡车的设计报告11次下载
- 两轮自平衡智能车直立行走研究6次下载
- 两轮自平衡小车毕业设计!!-修改13次下载
- 两轮自平衡车制作与调试stm32-(Balancs)15次下载
- 两轮自平衡小车的设计与实现20次下载
- STM32_两轮平衡车程序73次下载
- 两轮自平衡车制作与调试stm32_(Balancs)45次下载
- 武汉芯源半导体CW32L010在两轮车仪表的应用介绍160次阅读
- 电动车电动机的构成部件1973次阅读
- 电动车控制器电源管理IC U6119简介1038次阅读
- APM32F035电动两轮车电机控制器方案介绍1727次阅读
- 基于STM32的两轮平衡小车设计3858次阅读
- 电动车电机寿命是多少年_如何延长电动车电机寿命278736次阅读
- 电动车电机原理_电动车电机拆解图49752次阅读
- 电动车电池怎样修复_电动车电池修复方法26425次阅读
- 电动车控制器坏了怎么办_电动车控制器失效原因58442次阅读
- 电动车控制器接线图_电动车控制器接线方法81309次阅读
- 平衡车是什么?电动平衡车的原理是怎样的?25504次阅读
- 陀螺仪漂移和高频扰动对两轮平衡车姿态角度测量分析5581次阅读
- 电动车转换器作用50364次阅读
- 基于STM32和MPU-6050的两轮自平衡小车系统设计与实现32321次阅读
- 四轮独立驱动电动车高速CAN网络数据分析技术1596次阅读
 上傳資料賺積分
上傳資料賺積分 广告![]()
下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 6次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5基于FPGA的光纖通信系統的設計與實現
- 0.61 MB | 2次下載 | 免費
- 651單片機窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費
- 751單片機大棚環境控制器仿真程序
- 1.10 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6653次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537796次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191185次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論