 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
本文從工程應(yīng)用出發(fā),將航模固定翼飛機作為研究平臺,在總結(jié)國內(nèi)外微小型無人機飛行控制系統(tǒng)設(shè)計的基礎(chǔ)上,提出了低成本飛行控制系統(tǒng)設(shè)計方案。
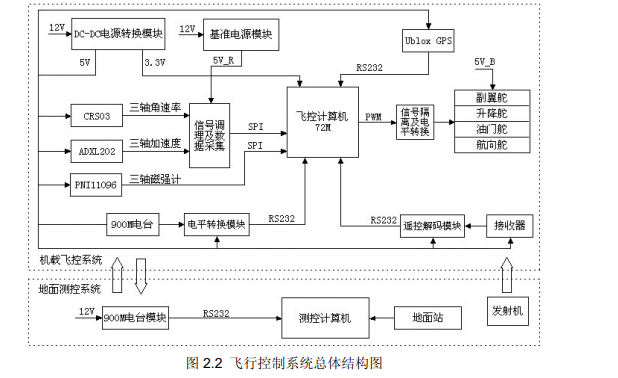
首先,提出飛行控制系統(tǒng)總體方案,對硬件系統(tǒng)進(jìn)行了詳細(xì)設(shè)計。無人機硬件系統(tǒng)總體分為兩個部分:機載飛控系統(tǒng)和地面測控系統(tǒng),其中機載飛控系統(tǒng)以 STM32 微控制器為核心,集成了數(shù)據(jù)采集系統(tǒng)、GPS 模塊、遙控解碼模塊、舵機驅(qū)動模塊、數(shù)傳電臺和電源模塊;地面測控系統(tǒng)包括測控計算機、數(shù)傳電臺、地面站軟件、發(fā)射機等。
其次,對無人機捷聯(lián)導(dǎo)航算法進(jìn)行了研究。捷聯(lián)導(dǎo)航算法用于無人機姿態(tài)、速度、位置等信息的濾波解算,是解決無人機飛行狀態(tài)準(zhǔn)確測量的關(guān)鍵技術(shù)之一。本文設(shè)計了基于誤差四元數(shù)的姿態(tài)卡爾曼濾波算法;同時考慮在大機動情況下,剛體加速度的影響,采用組合濾波的方法,提高姿態(tài)解算的精度,并進(jìn)行了仿真驗證;通過引入 GPS 的速度和位置量測信息,分別設(shè)計了速度、位置卡爾曼濾波器。
然后,建立了無人機的飛行動力學(xué)模型。基于該模型采用 PID 控制方法對無人機縱向、橫側(cè)向控制回路控制律進(jìn)行設(shè)計;同時對無人機的自主飛行進(jìn)行研究,給出了直線自主飛行和圓周自主飛行制導(dǎo)參數(shù)的計算方法,并設(shè)計了相應(yīng)的控制律;之后進(jìn)行了仿真,驗證了所設(shè)計的控制律。
最后,展開無人機的試驗研究,驗證了飛行控制系統(tǒng)硬件與捷聯(lián)導(dǎo)航算法的可靠性和可行性。
無人機是一種由動力驅(qū)動、無人駕駛、可重復(fù)使用的航空器的簡稱。在軍事上,因為具有零傷亡、戰(zhàn)場生存能力強等特點,非常適合執(zhí)行高危險或人類無法參與的任務(wù);在民用上,它也完全可以代替有人機完成一些任務(wù),如救援搜索、災(zāi)情監(jiān)測、氣象探測等。微小型無人機具有隱蔽性強、機動靈活、制造成本低等特點,但由于微小型無人機本身有限的負(fù)載能力和體積限制,現(xiàn)有的一些導(dǎo)航和飛行控制系統(tǒng)很難直接在微小型無人機上使用,所以對微小型無人機的嵌入式飛行控制系統(tǒng)進(jìn)行研究工程意義重大。隨著微機械傳感技術(shù)、全球衛(wèi)星導(dǎo)航技術(shù)、自動控制技術(shù)、通信技術(shù)的不斷發(fā)展,無人機已經(jīng)逐漸進(jìn)入實用階段。在軍事上無人機已經(jīng)從單純的空中偵察到現(xiàn)在的空中監(jiān)控、導(dǎo)彈攻擊、火力制導(dǎo)、通信中繼、邊界巡邏、甚至戰(zhàn)斗任務(wù)中都發(fā)揮了重要的作用,取得了良好的軍事效益,各個國家都給予了相當(dāng)程度的關(guān)注。在民用和警用領(lǐng)域,無人機同樣發(fā)揮著重要的作用。無人機在航空攝影、地理測繪、遙測遙感、大氣監(jiān)測、環(huán)境保護(hù)、資源勘探、通信中繼、電力巡線、農(nóng)藥噴灑等領(lǐng)域也完全可以替代有人機,具有光明的應(yīng)用前景。目前,無人機飛行控制系統(tǒng)仍屬于國際前沿技術(shù),因為其軍事運用價值顯著,有必要自主創(chuàng)新,研制具有自主知識產(chǎn)權(quán)的無人機飛行控制系統(tǒng)。
- 無人機結(jié)構(gòu)與系統(tǒng) 8次下載
- /STM32/單片機/RoboFly全套無人機原理圖及PCB和測試程序 35次下載
- 基于STM32單片機的四旋翼飛行器控制系統(tǒng) 123次下載
- 一種小型復(fù)合式無人機飛行控制布局方案 23次下載
- 無人機和無人機控制方法及無人機遠(yuǎn)程操控系統(tǒng)方法說明 69次下載
- 無人機中繼模塊和無人機圖傳控制系統(tǒng)介紹 60次下載
- 基于無人機的自主飛行控制系統(tǒng)設(shè)計應(yīng)用 7次下載
- 基于ATmegal28的無人機控制系統(tǒng)硬件設(shè)計 7次下載
- 基于STM32微控制器的小型無人機飛行控制系統(tǒng) 37次下載
- 基于STM32的無人機姿態(tài)測量系統(tǒng)設(shè)計 44次下載
- 基于SOPC的微型無人機飛行控制系統(tǒng)設(shè)計_宋宇 1次下載
- 基于RTX的無人機飛行剖面實時仿真 37次下載
- 無人機飛行控制系統(tǒng)地面仿真平臺設(shè)計與實現(xiàn) 136次下載
- 基于ARM的無人機飛行控制系統(tǒng)的實現(xiàn)
- XX系列無人機自主安控系統(tǒng)可靠性設(shè)計
- 基于STM32單片機的智能窗簾控制系統(tǒng)設(shè)計 820次閱讀
- 基于STM32單片機的智能冰箱控制系統(tǒng)設(shè)計 582次閱讀
- 四旋翼無人機的飛行原理及控制方法 4291次閱讀
- 基于DSP的無人飛行器飛行控制系統(tǒng)設(shè)計 1135次閱讀
- 無人機鏈路系統(tǒng)的組成 1.6w次閱讀
- 無人機實現(xiàn)穩(wěn)定飛行需要用到哪些傳感器呢 2027次閱讀
- Naza-M多旋翼無人機飛控系統(tǒng)的詳細(xì)資料簡介 1.2w次閱讀
- 無人機飛行感知技術(shù)有什么用途 2026次閱讀
- 無人機技術(shù)現(xiàn)狀及無人機行業(yè)未來發(fā)展趨勢 3.6w次閱讀
- 一文匯總無人機基本知識 1.4w次閱讀
- 關(guān)于無人機飛行控制系統(tǒng)的全面解析 1.3w次閱讀
- 淺析基于FPGA的無人機控制器設(shè)計方案解析 6747次閱讀
- 怎樣使無人機安全飛行?無人機飛行需要掌握什么安全知識 1.5w次閱讀
- 大疆無人機的三種飛行模式詳解 29.4w次閱讀
- 中國無人機技術(shù)型號種類介紹 3.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關(guān)電源基礎(chǔ)知識
- 5.73 MB | 6次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設(shè)計
- 0.60 MB | 3次下載 | 免費
- 5基于FPGA的光纖通信系統(tǒng)的設(shè)計與實現(xiàn)
- 0.61 MB | 2次下載 | 免費
- 651單片機窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費
- 751單片機大棚環(huán)境控制器仿真程序
- 1.10 MB | 2次下載 | 免費
- 8基于51單片機的RGB調(diào)色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6653次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537796次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191185次下載 | 免費
- 7十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論