 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻基于μC/OS-II縮短實(shí)時(shí)操作系統(tǒng)中斷關(guān)閉時(shí)間的方法
2017-10-25 |
rar |
0.4 MB |
次下載 |
1積分
資料介紹
引 言
在實(shí)時(shí)操作系統(tǒng)中,由于是多任務(wù)的并發(fā)運(yùn)行,所以在進(jìn)入一些臨界區(qū)時(shí)為了保證多任務(wù)的正常運(yùn)行要關(guān)中斷。而最大關(guān)中斷時(shí)間是衡量一個(gè)實(shí)時(shí)操作系統(tǒng)性能的重要指標(biāo),因?yàn)橥獠康妮斎胍话愣际峭ㄟ^中斷方式來(lái)通知系統(tǒng)的,系統(tǒng)如果關(guān)中斷時(shí)間長(zhǎng),必然不能及時(shí)接收中斷,對(duì)中斷的及時(shí)處理就更談不上。
更重要的是,有些應(yīng)用場(chǎng)合對(duì)關(guān)中斷的時(shí)間有非常嚴(yán)格的要求。例如,在電力系統(tǒng)微機(jī)繼電保護(hù)裝置中,對(duì)電流A/D采樣時(shí),為了保障對(duì)采樣值的正確處理,定時(shí)中斷的每一個(gè)周期時(shí)間都必須及時(shí)采樣。試想,如果定時(shí)器設(shè)置的周期時(shí)間到,定時(shí)器中斷產(chǎn)生,但恰恰這時(shí)系統(tǒng)處于關(guān)中斷時(shí)間,系統(tǒng)就不能及時(shí)進(jìn)行采樣;而當(dāng)關(guān)中斷時(shí)間過長(zhǎng),超過一定的值時(shí),系統(tǒng)再來(lái)進(jìn)行采樣,依據(jù)此采樣值的計(jì)算結(jié)果就會(huì)出錯(cuò)。所以,在這樣的場(chǎng)合中,一種實(shí)時(shí)操作系統(tǒng)的最大關(guān)中斷時(shí)間就成為該種實(shí)時(shí)操作系統(tǒng)能否成功運(yùn)用的最關(guān)鍵的因素。
筆者將以μC/OS-II實(shí)時(shí)內(nèi)核為例,通過對(duì)μC/OS-II的改進(jìn),向讀者描述一種縮短實(shí)時(shí)操作系統(tǒng)中斷關(guān)閉時(shí)間的方法。之所以選擇μC/OS-II,一是因?yàn)樽x者容易獲得相關(guān)代碼,國(guó)內(nèi)很多讀者也對(duì)μC/OS-II有一定程度的了解;二是因?yàn)槠渥陨斫Y(jié)構(gòu)簡(jiǎn)單,適合運(yùn)用于低檔嵌入式處理器,關(guān)中斷時(shí)間的問題更加突出。低檔嵌入式處理器的處理速度慢,在關(guān)中斷時(shí)間里處理相同的軟件代碼,花費(fèi)的時(shí)間更長(zhǎng),相對(duì)地延長(zhǎng)了關(guān)中斷時(shí)間,這時(shí)盡量從軟件著手解決關(guān)中斷時(shí)間的問題。
1 系統(tǒng)狀態(tài)標(biāo)志法概述
μC/OS-II中在進(jìn)入臨界區(qū)之前為什么要關(guān)閉中斷?通過相關(guān)資料[1]的介紹和對(duì)μC/OS-II源代碼的理解,我們知道在μC/OS-II中一旦不關(guān)中斷就進(jìn)入臨界區(qū)。當(dāng)某一任務(wù)進(jìn)入臨界區(qū)時(shí),若恰好發(fā)生中斷,那么這時(shí)有可能引起兩種對(duì)臨界區(qū)操作的沖突:①在中斷服務(wù)程序中要操作同一臨界區(qū);②因?yàn)橹袛嗟漠a(chǎn)生而引起任務(wù)的轉(zhuǎn)換,在新的任務(wù)中要操作同一臨界區(qū)。所以μC/OS-II中在進(jìn)入臨界區(qū)前要關(guān)閉中斷。
針對(duì)μC/OS-II關(guān)中斷機(jī)制的分析,考慮用一種系統(tǒng)狀態(tài)標(biāo)志法來(lái)解決這樣的臨界沖突。在μC/OS-II增加一個(gè)全局布爾變量來(lái)表示系統(tǒng)的狀態(tài),稱為“系統(tǒng)狀態(tài)標(biāo)志”。
對(duì)于μC/OS-II中所有可以在中斷中出現(xiàn)又要對(duì)臨界區(qū)操作的函數(shù),可以在進(jìn)入臨界區(qū)之前先查詢系統(tǒng)狀態(tài)標(biāo)志。如果目前系統(tǒng)沒有進(jìn)入臨界操作狀態(tài),則首先將該標(biāo)志置位,表示系統(tǒng)進(jìn)入臨界操作狀態(tài),然后該函數(shù)就可以操作臨界區(qū);而如果發(fā)現(xiàn)系統(tǒng)已進(jìn)入臨界操作狀態(tài),則將該函數(shù)對(duì)臨界區(qū)操作的部分單獨(dú)形成一個(gè)函數(shù),放到一個(gè)系統(tǒng)循環(huán)函數(shù)數(shù)組里,等待系統(tǒng)任務(wù)調(diào)度時(shí)執(zhí)行。
對(duì)于μC/OS-II中所有不可能在中斷程序中出現(xiàn)而又要對(duì)臨界區(qū)操作的函數(shù),因?yàn)楹瘮?shù)不在中斷中出現(xiàn),所以函數(shù)開始時(shí)系統(tǒng)狀態(tài)標(biāo)志肯定不會(huì)在臨界操作狀態(tài),因此可在函數(shù)操作臨界區(qū)時(shí)直接將系統(tǒng)狀態(tài)標(biāo)志置位,表示系統(tǒng)進(jìn)入臨界操作狀態(tài),然后即可進(jìn)行臨界區(qū)的操作。
系統(tǒng)狀態(tài)標(biāo)志的復(fù)位在任務(wù)調(diào)度函數(shù)中執(zhí)行。當(dāng)然對(duì)系統(tǒng)狀態(tài)標(biāo)志的設(shè)置是要在關(guān)中斷的條件下執(zhí)行的,這應(yīng)該算是系統(tǒng)新的一個(gè)臨界區(qū)。
2 該方法的具體實(shí)現(xiàn)
下面以對(duì)μC/OS-II v2.61代碼的改進(jìn)為例,具體講解該方法的具體實(shí)現(xiàn)。
2.1 任務(wù)調(diào)度函數(shù)OS_Sched的修改
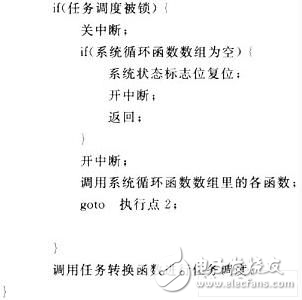
修改后的任務(wù)調(diào)度函數(shù)OS_Sched的偽代碼如下:
? ? ? ? ? ??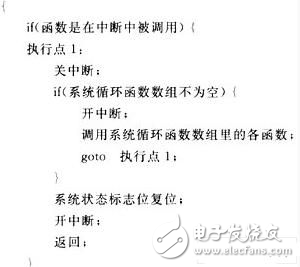

因?yàn)樵谌蝿?wù)調(diào)度函數(shù)OS_Sched中要執(zhí)行循環(huán)函數(shù)數(shù)組里的函數(shù),同時(shí)還要對(duì)系統(tǒng)狀態(tài)標(biāo)志復(fù)位,退出系統(tǒng)臨界操作狀態(tài),所以修改過的函數(shù)在遇到以下3種情況--該函數(shù)是在中斷里調(diào)用時(shí)、在任務(wù)調(diào)度鎖定時(shí)、當(dāng)前任務(wù)就是最高優(yōu)先級(jí)任務(wù)時(shí),都將執(zhí)行系統(tǒng)循環(huán)函數(shù)數(shù)組里的函數(shù),并將系統(tǒng)狀態(tài)標(biāo)志復(fù)位,而原任務(wù)調(diào)度函數(shù)在遇到以上3種情況時(shí)是直接返回的。
在實(shí)時(shí)操作系統(tǒng)中,由于是多任務(wù)的并發(fā)運(yùn)行,所以在進(jìn)入一些臨界區(qū)時(shí)為了保證多任務(wù)的正常運(yùn)行要關(guān)中斷。而最大關(guān)中斷時(shí)間是衡量一個(gè)實(shí)時(shí)操作系統(tǒng)性能的重要指標(biāo),因?yàn)橥獠康妮斎胍话愣际峭ㄟ^中斷方式來(lái)通知系統(tǒng)的,系統(tǒng)如果關(guān)中斷時(shí)間長(zhǎng),必然不能及時(shí)接收中斷,對(duì)中斷的及時(shí)處理就更談不上。
更重要的是,有些應(yīng)用場(chǎng)合對(duì)關(guān)中斷的時(shí)間有非常嚴(yán)格的要求。例如,在電力系統(tǒng)微機(jī)繼電保護(hù)裝置中,對(duì)電流A/D采樣時(shí),為了保障對(duì)采樣值的正確處理,定時(shí)中斷的每一個(gè)周期時(shí)間都必須及時(shí)采樣。試想,如果定時(shí)器設(shè)置的周期時(shí)間到,定時(shí)器中斷產(chǎn)生,但恰恰這時(shí)系統(tǒng)處于關(guān)中斷時(shí)間,系統(tǒng)就不能及時(shí)進(jìn)行采樣;而當(dāng)關(guān)中斷時(shí)間過長(zhǎng),超過一定的值時(shí),系統(tǒng)再來(lái)進(jìn)行采樣,依據(jù)此采樣值的計(jì)算結(jié)果就會(huì)出錯(cuò)。所以,在這樣的場(chǎng)合中,一種實(shí)時(shí)操作系統(tǒng)的最大關(guān)中斷時(shí)間就成為該種實(shí)時(shí)操作系統(tǒng)能否成功運(yùn)用的最關(guān)鍵的因素。
筆者將以μC/OS-II實(shí)時(shí)內(nèi)核為例,通過對(duì)μC/OS-II的改進(jìn),向讀者描述一種縮短實(shí)時(shí)操作系統(tǒng)中斷關(guān)閉時(shí)間的方法。之所以選擇μC/OS-II,一是因?yàn)樽x者容易獲得相關(guān)代碼,國(guó)內(nèi)很多讀者也對(duì)μC/OS-II有一定程度的了解;二是因?yàn)槠渥陨斫Y(jié)構(gòu)簡(jiǎn)單,適合運(yùn)用于低檔嵌入式處理器,關(guān)中斷時(shí)間的問題更加突出。低檔嵌入式處理器的處理速度慢,在關(guān)中斷時(shí)間里處理相同的軟件代碼,花費(fèi)的時(shí)間更長(zhǎng),相對(duì)地延長(zhǎng)了關(guān)中斷時(shí)間,這時(shí)盡量從軟件著手解決關(guān)中斷時(shí)間的問題。
1 系統(tǒng)狀態(tài)標(biāo)志法概述
μC/OS-II中在進(jìn)入臨界區(qū)之前為什么要關(guān)閉中斷?通過相關(guān)資料[1]的介紹和對(duì)μC/OS-II源代碼的理解,我們知道在μC/OS-II中一旦不關(guān)中斷就進(jìn)入臨界區(qū)。當(dāng)某一任務(wù)進(jìn)入臨界區(qū)時(shí),若恰好發(fā)生中斷,那么這時(shí)有可能引起兩種對(duì)臨界區(qū)操作的沖突:①在中斷服務(wù)程序中要操作同一臨界區(qū);②因?yàn)橹袛嗟漠a(chǎn)生而引起任務(wù)的轉(zhuǎn)換,在新的任務(wù)中要操作同一臨界區(qū)。所以μC/OS-II中在進(jìn)入臨界區(qū)前要關(guān)閉中斷。
針對(duì)μC/OS-II關(guān)中斷機(jī)制的分析,考慮用一種系統(tǒng)狀態(tài)標(biāo)志法來(lái)解決這樣的臨界沖突。在μC/OS-II增加一個(gè)全局布爾變量來(lái)表示系統(tǒng)的狀態(tài),稱為“系統(tǒng)狀態(tài)標(biāo)志”。
對(duì)于μC/OS-II中所有可以在中斷中出現(xiàn)又要對(duì)臨界區(qū)操作的函數(shù),可以在進(jìn)入臨界區(qū)之前先查詢系統(tǒng)狀態(tài)標(biāo)志。如果目前系統(tǒng)沒有進(jìn)入臨界操作狀態(tài),則首先將該標(biāo)志置位,表示系統(tǒng)進(jìn)入臨界操作狀態(tài),然后該函數(shù)就可以操作臨界區(qū);而如果發(fā)現(xiàn)系統(tǒng)已進(jìn)入臨界操作狀態(tài),則將該函數(shù)對(duì)臨界區(qū)操作的部分單獨(dú)形成一個(gè)函數(shù),放到一個(gè)系統(tǒng)循環(huán)函數(shù)數(shù)組里,等待系統(tǒng)任務(wù)調(diào)度時(shí)執(zhí)行。
對(duì)于μC/OS-II中所有不可能在中斷程序中出現(xiàn)而又要對(duì)臨界區(qū)操作的函數(shù),因?yàn)楹瘮?shù)不在中斷中出現(xiàn),所以函數(shù)開始時(shí)系統(tǒng)狀態(tài)標(biāo)志肯定不會(huì)在臨界操作狀態(tài),因此可在函數(shù)操作臨界區(qū)時(shí)直接將系統(tǒng)狀態(tài)標(biāo)志置位,表示系統(tǒng)進(jìn)入臨界操作狀態(tài),然后即可進(jìn)行臨界區(qū)的操作。
系統(tǒng)狀態(tài)標(biāo)志的復(fù)位在任務(wù)調(diào)度函數(shù)中執(zhí)行。當(dāng)然對(duì)系統(tǒng)狀態(tài)標(biāo)志的設(shè)置是要在關(guān)中斷的條件下執(zhí)行的,這應(yīng)該算是系統(tǒng)新的一個(gè)臨界區(qū)。
2 該方法的具體實(shí)現(xiàn)
下面以對(duì)μC/OS-II v2.61代碼的改進(jìn)為例,具體講解該方法的具體實(shí)現(xiàn)。
2.1 任務(wù)調(diào)度函數(shù)OS_Sched的修改
修改后的任務(wù)調(diào)度函數(shù)OS_Sched的偽代碼如下:
? ? ? ? ? ??
因?yàn)樵谌蝿?wù)調(diào)度函數(shù)OS_Sched中要執(zhí)行循環(huán)函數(shù)數(shù)組里的函數(shù),同時(shí)還要對(duì)系統(tǒng)狀態(tài)標(biāo)志復(fù)位,退出系統(tǒng)臨界操作狀態(tài),所以修改過的函數(shù)在遇到以下3種情況--該函數(shù)是在中斷里調(diào)用時(shí)、在任務(wù)調(diào)度鎖定時(shí)、當(dāng)前任務(wù)就是最高優(yōu)先級(jí)任務(wù)時(shí),都將執(zhí)行系統(tǒng)循環(huán)函數(shù)數(shù)組里的函數(shù),并將系統(tǒng)狀態(tài)標(biāo)志復(fù)位,而原任務(wù)調(diào)度函數(shù)在遇到以上3種情況時(shí)是直接返回的。
下載該資料的人也在下載
下載該資料的人還在閱讀
更多 >
- 嵌入式實(shí)時(shí)操作系統(tǒng)μC、OS-II在ARM上的移植.
- 提高uc/os-ii操作系統(tǒng)安全與穩(wěn)定性的方法 0次下載
- 關(guān)于μC/OS-II實(shí)時(shí)操作系統(tǒng)內(nèi)存管理的改進(jìn)方法分析 0次下載
- 嵌入式實(shí)時(shí)操作系統(tǒng)uC/OS-II內(nèi)核_英版 0次下載
- μC/OS-II 在Nios上的移植
- 實(shí)時(shí)操作系統(tǒng)OS-II在ARM7上的移植
- 基于ARM的嵌入式操作系統(tǒng)μC/OS-II的移植
- 輕型PPP協(xié)議在μC/OS-II操作系統(tǒng)中的實(shí)現(xiàn)
- 實(shí)時(shí)操作系統(tǒng)μC/OS-II調(diào)度算法的研究
- 實(shí)時(shí)操作系統(tǒng)μC/OS-II 在LPC2210 上的移植研究
- 嵌入式實(shí)時(shí)操作系統(tǒng)μC OS-II與eCos的比較
- μC OS-II 在Nios 上的移植1
- 實(shí)時(shí)操作系統(tǒng)μC OS - II下TCP IP 協(xié)議棧的實(shí)現(xiàn)
- μC/OS-II 任務(wù)調(diào)度機(jī)制的改進(jìn)
- 嵌入式實(shí)時(shí)操作系統(tǒng)μC/OS-II與eCos的比較
- FreeRTOS:一個(gè)迷你的實(shí)時(shí)操作系統(tǒng)內(nèi)核 828次閱讀
- 基于μC/OS-II和TMS320LF2407A實(shí)現(xiàn)集散式數(shù)據(jù)采集系統(tǒng)的設(shè)計(jì) 2186次閱讀
- 基于實(shí)時(shí)嵌入式操作系統(tǒng)mC/OS-II實(shí)現(xiàn)GPRS終端系統(tǒng)的設(shè)計(jì) 2252次閱讀
- 基于MC9S12DP256芯片和μC/OS-II實(shí)現(xiàn)CCP軟件的設(shè)計(jì) 2685次閱讀
- 基于嵌入式工控模塊和μC/OS-II實(shí)現(xiàn)車載狀態(tài)監(jiān)控系統(tǒng)的設(shè)計(jì) 1907次閱讀
- 基于μC/OS-II操作系統(tǒng)實(shí)現(xiàn)在P89V51RD2微控制器上運(yùn)行 747次閱讀
- 基于μC/OS-II操作系統(tǒng)在SPCE061A上的移植優(yōu)化研研究 779次閱讀
- 51單片機(jī)對(duì)μC/OS-II實(shí)時(shí)操作系統(tǒng)的移植 2385次閱讀
- 淺論uC/OS-II 在電動(dòng)車電池管理系統(tǒng)中的應(yīng)用研究 1313次閱讀
- 淺析STM32的五種嵌入式操作系統(tǒng)的特點(diǎn)及不足 4070次閱讀
- 五種基于STM平臺(tái)的且滿足實(shí)時(shí)控制要求操作的嵌入式操作系統(tǒng)的介紹 5158次閱讀
- 車輛調(diào)度系統(tǒng)的整體設(shè)計(jì) UC/OS-II的內(nèi)核調(diào)度機(jī)理 1116次閱讀
- 基于LPC2365和嵌入式μC/OS-II下的多串口通信編程方法教程 2087次閱讀
- 利用μC/OS-II的嵌入式激光測(cè)距系統(tǒng) 1992次閱讀
- 用AndesCore N1033A-S處理器實(shí)現(xiàn)μC/OS-II的移植 3969次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 2開關(guān)電源基礎(chǔ)知識(shí)
- 5.73 MB | 6次下載 | 免費(fèi)
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設(shè)計(jì)
- 0.60 MB | 3次下載 | 免費(fèi)
- 5基于FPGA的光纖通信系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 0.61 MB | 2次下載 | 免費(fèi)
- 6基于FPGA的C8051F單片機(jī)開發(fā)板設(shè)計(jì)
- 0.70 MB | 2次下載 | 免費(fèi)
- 751單片機(jī)窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費(fèi)
- 8基于51單片機(jī)的RGB調(diào)色燈程序仿真
- 0.86 MB | 2次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33564次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21548次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6653次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537796次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191185次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183278次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論