 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
作者 / 浪跡天涯
出品 / 焉知
站在2020年年尾回看智能駕駛,這一年黑科技層出不窮,無疑是一片琳瑯滿目的壯觀景象:超大的顯示屏娛樂功能強大、智能座艙高度數(shù)字化、OTA遠程升級幾乎是新車型標配、ADAS輔助駕駛功能也越來越豐富和實用......至于智能駕駛的終極目標——無人駕駛,在市場的狂熱逐漸退燒后,各大廠家重新制定了自動駕駛計劃。智能汽車正在朝著便利和解放駕駛員的方向上狂奔。
但是,除了給駕駛員帶來便利以外,智能汽車更核心的愿景是減少交通事故,為人類創(chuàng)造更美好的生活。如果解放了駕駛員的同時卻不能保證駕駛員的安全,個人認為智能汽車上的黑科技更多的是錦上添花,而沒有大規(guī)模推廣的意義。
支撐所有智能駕駛技術(shù)的是全新的電子電器系統(tǒng),而電子電器系統(tǒng)的基本組成是軟件和硬件。從這個角度,智能駕駛的安全就是軟件和硬件的安全。為了讓軟件和硬件足夠安全,無數(shù)的汽車工程師正在行動,并在探索與合作的過程中逐步達成了共識,至少要從三個方面去保證安全:
功能安全 (Functional Safety)
預(yù)期功能安全(Safety of the Intended Functionality)
信息安全 (Cyber Security)
未來的智能汽車在安全上的突破,就是找到這三個方向在汽車上落地量產(chǎn)的可行性方案。而這三個方向的落地之難,從某種程度上也折射出智能駕駛距離終極目標的距離還很遠。本文將對這三個方向的內(nèi)容以及發(fā)展現(xiàn)狀做簡單介紹,嘗試回答落地難在何處,希望給讀者們帶來一些有價值的參考。
1. 功能安全 (Functional Safety)
1.1. 什么是功能安全?
ISO 26262中對功能安全的定義為:
ISO 26262:absence of unreasonable risk due to hazards caused by malfunctioning behavior of E/E systems.(不存在由電子電氣系統(tǒng)的功能異常表現(xiàn)引起的危害而導(dǎo)致不合理的風險)
簡而言之,功能安全聚焦系統(tǒng)故障后怎么做。危害有很多類型,如人身傷害或者財產(chǎn)損失等等。功能安全所關(guān)注的危害指對駕駛員或者路人或周邊車輛內(nèi)人員(注意:不僅僅是駕駛員)造成的健康傷害。換句話說,功能安全開發(fā)目的是避免傷人。
功能安全的定義中有一個關(guān)鍵詞“unreasonable”,即“不可被接受的”。就像世界上沒有永動機一樣,世界上也沒有100%安全的系統(tǒng),因此功能安全追求的是將危害控制在可被接受的范圍。而是否可被接受,需要從兩個維度去衡量:危害的嚴重性和危害發(fā)生的頻率。舉例來說,飛機失事幾乎無人生還,但是正因為飛機失事的概率非常低,所以不影響它成為最重要的交通工具之一;電動車窗發(fā)生卡滯故障的頻率比較高,但是故障不會讓人受傷,因此很多司機甚至只有等到下個月去4S店時才想起來維修它。但是,如果你的車突然在高速上自動加速,估計你馬上停在緊急帶,驚魂未定便馬上打電話給4S店喊著要退車了,因為這種原本可以通過設(shè)計規(guī)避的故障是不可接受的。這也正是功能安全開發(fā)期望避免的故障。
1.2. 功能安全的發(fā)展現(xiàn)狀
相對于預(yù)期功能安全和信息安全,功能安全的發(fā)展是最成熟的。自2011年功能安全標準ISO 26262正式發(fā)布以來,已經(jīng)過去了快10年。這這段時間里,在汽車智能化高速發(fā)展的驅(qū)動下,功能安全越來越被汽車行業(yè)接受,國內(nèi)外各大主流汽車企業(yè)陸陸續(xù)續(xù)將ISO 26262的需求融入自己的研發(fā)體系和流程中,以保證安全能跟上電子電器系統(tǒng)快速變革的步伐,保證輔助駕駛功能不僅好用而且安全。借著這股東風,ISO 26262一路“平步青云”,功能安全儼然成為了汽車研發(fā)的新興熱門話題。
但是,隨著更高階的自動駕駛的開發(fā)思路越來越清晰,功能安全也漸露窘色。
相比較輔助駕駛,自動駕駛最大的難點在于系統(tǒng)在出現(xiàn)故障之后,需要系統(tǒng)來自己操作避免事故(自動駕駛等級越高,駕駛員可以越晚介入接管甚至是完全不用接管),出了事故是廠家的責任而不是駕駛員的責任。
這正是為什么之前特斯拉被告虛假宣傳,從而不得不將其宣稱的“自動駕駛”改成“增強版輔助駕駛”的原因。因為特斯拉的Autopilot功能正常工作的時候,表現(xiàn)得確實是無人駕駛,而一旦出現(xiàn)異常,卻是由駕駛員來擔責。
故障發(fā)生后,系統(tǒng)從報警變成了繼續(xù)進行安全控制,可以預(yù)見,功能安全的開發(fā)難度以及功能安全對系統(tǒng)架構(gòu)的要求都產(chǎn)生了質(zhì)的改變。汽車實現(xiàn)自動駕駛實際上和已經(jīng)實現(xiàn)了自動駕駛的飛機的設(shè)計思路類似。飛機的自動駕駛是怎么保證的呢?除了盡可能保證零部件可靠性之外,飛機會有兩個發(fā)動機,保證在一個發(fā)動機故障以后另一個仍能保證安全飛行。這就是“冗余設(shè)計”的概念。冗余設(shè)計在飛機上到處可見,比如兩個獨立運行的計算機系統(tǒng),兩套獨立的供電系統(tǒng)等等。
回到汽車自動駕駛上,同樣對關(guān)鍵部件采用冗余設(shè)計,保證當故障發(fā)生后備份系統(tǒng)仍能保證車輛正常運行。可以預(yù)見的是,自動駕駛的大腦控制系統(tǒng)、制動系統(tǒng)、轉(zhuǎn)向系統(tǒng)、供電系統(tǒng)等都需要冗余。
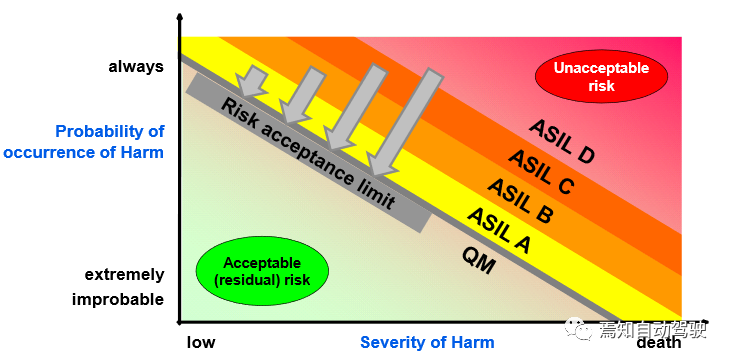
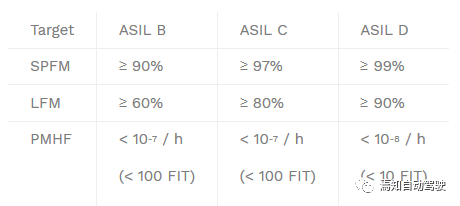
但是,冗余一方面意味著部件數(shù)量增加,成本上升;另一方面,功能安全中會對系統(tǒng)故障可能導(dǎo)致的危害事件進行分級,簡單來說從ASIL A到ASIL D危害程度逐漸升高。那么開發(fā)要求也逐漸升高。比如單就硬件開發(fā)而言,ASIL D對單點故障度量(SPFM, signal point fault metrics)、潛在故障度量(LFM, Latent fault metrics)等的指標要求近乎苛刻。
而對于需要冗余的制動系統(tǒng)、轉(zhuǎn)向系統(tǒng)、大腦控制系統(tǒng)等而言,它們的失效都會引起一些ASIL D的危害事件,換句話說,這些系統(tǒng)的開發(fā)需求中至少有一部分是有最嚴苛的ASIL D要求的。如今兩套冗余都需要滿足這些要求,無疑增加了開發(fā)難度和開發(fā)成本。
但是汽車開發(fā)又不得不面對這樣的現(xiàn)實:和飛機不同,汽車的利潤比飛機的利潤低得多,全靠走量,如果不計成本,那么即使實現(xiàn)了安全系數(shù)很高的自動駕駛系統(tǒng),也會因為價格過高而不被市場認可。如何在功能和安全之間找到平衡,是功能安全在自動駕駛汽車上面臨的挑戰(zhàn)之一,也是未來在智能駕駛汽車上真正落地功能安全的關(guān)鍵。
2. 預(yù)期功能安全 (SOTIF, Safety of the Intended Functionality)
2.1. 什么是SOTIF?
在回答這個問題之前,先問一個問題:就算不計成本地保證了智能駕駛系統(tǒng)的功能安全,這個系統(tǒng)是否就足夠安全了呢?
我們不妨先來看一個召回的案例。
2020年3月19日,由于自動緊急制動系統(tǒng)(Autonomous Emergency Braking, AEB)存在故障,沃爾沃汽車宣布在全球范圍內(nèi)召回汽車近74萬輛,共涉及9款在售車型。此次召回的原因,是因為一些場景下無法有效識別物體,導(dǎo)致AEB在該工作的時候不工作。一般AEB探測物體依賴傳感器毫米波雷達和攝像頭兩個關(guān)鍵傳感器的信息融合。因為多普勒效應(yīng),毫米波雷達不擅長識別靜態(tài)物體;而攝像頭在霧天或者光線不足等情況下探測度都會降低,這些因素都會導(dǎo)致在一些場景下無法正確識別物體從而激活A(yù)EB。
因此,這次召回不是因為系統(tǒng)故障導(dǎo)致的,而是傳感器本身的功能局限導(dǎo)致的。ISO 26262功能安全旨在避免電子電氣系統(tǒng)故障導(dǎo)致功能異常而引起的不合理的危害,功能受限ISO 26262的范疇。為彌補功能安全的局限,預(yù)期功能安全SOTIF (Safety of the Intended Functionality)以及標準ISO 21448便誕生了。
簡單來說,SOTIF強調(diào)的是避免因為預(yù)期的功能表現(xiàn)局限而導(dǎo)致不合理的風險。
因為SOTIF誕生的背景是智能駕駛的發(fā)展,所以如果按照智能駕駛的功能鏈:感知——決策——執(zhí)行來歸類,“功能表現(xiàn)局限”體現(xiàn)在3個方面:
(1)傳感器感知局限導(dǎo)致場景識別錯誤
(2)深度學習不夠?qū)е聸Q策算法判斷場景錯誤
(3)執(zhí)行器功能局限導(dǎo)致與理想目標偏差
而從另一個維度,“功能表現(xiàn)”可以概括為4類:
(1)在危險場景介入 (正常工作)
(2)在非危險場景介入 (誤觸發(fā))
(3)在危險場景不介入 (漏觸發(fā))
(4)在非危險場景不介入(正常關(guān)閉)
第1種和第4種情況沒有危害,而其余兩種則有危害,也正是SOTIF關(guān)注的危害。要有效避免誤觸發(fā)和漏觸發(fā),第一步是識別場景并進行分類,確定哪些場景下功能觸發(fā)是安全的,而哪些場景下功能不觸發(fā)是安全的。在OTIF將所有的場景劃分成下圖所示四個部分,且目標為:最大可能減小Area2 (known unsafe scenarios) 和Area3 (unknown unsafe scenarios) 的范圍。


2.2. SOTIF的發(fā)展現(xiàn)狀
目前SOTIF的標準ISO 21448還是draft版本,按照計劃在2022年3月正式發(fā)布。目前對于一些關(guān)鍵問題仍然存在爭議,這也是ISO 21448遲遲沒有發(fā)布的重要原因。

舉例來說,而對于Area3(unknown unsafe scenarios),處理起來則相對棘手很多。舉個例子,這就好比我們在開發(fā)一輛將來投放在中國市場的車,需要在開發(fā)初期事先識別出一輛車在中國路況下可能會碰到的各種場景。我想即使讓全世界頂尖的安全專家坐一起產(chǎn)出也極其有限。
SOTIF對降低Area3,大體思路如下:
(1)提高系統(tǒng)和零部件功能的可信度。
Validation: set of activities ensuring and gaining confidence that a system is able to accomplish its intended use, goals, and objectives
Note to entry: ......Validation activities address mainly "area 3" of figure 7 including the validation of SOTIF in unknown use cases."
(2)endurance run。
概括來說就是通過實車路試和仿真測試積累大數(shù)據(jù)。當數(shù)據(jù)積累越多,越能夠?qū)nknown scenarios變成known scenarios。
積累實車路試和仿真測試數(shù)據(jù)是一件耗時耗力耗材的大規(guī)模工程。這無疑又給智能駕駛的安全開發(fā)增加了成本,另外,搭建可信度高的仿真測試平臺也需要巨額成本,成本因素會給SOTIF的推廣帶來比較大的挑戰(zhàn)。另一方面,ISO 26262從誕生到被行業(yè)普遍認可用并較為熟練運用經(jīng)歷了9年,SOTI又會如何目前仍是一個問號。
3. 信息安全 (Cyber Security)
3.1. 什么是信息安全?
功能安全和SOTIF研究的對象是智能駕駛系統(tǒng)自身可能產(chǎn)生的失效,還有另一類失效也是未來智能駕駛不可忽略的——黑客攻擊。
2015年7月,兩名美國白帽黑客成功侵入一輛正在行駛的JEEP自由光SUV的CAN總線網(wǎng)絡(luò)系統(tǒng),向發(fā)動機、變速箱、制動、轉(zhuǎn)向等系統(tǒng)發(fā)送錯誤指令,最終使這輛車開翻到馬路邊的斜坡下。這起案件導(dǎo)致吉普大規(guī)模召回。

為了應(yīng)對這一種情況,已經(jīng)在互聯(lián)網(wǎng)領(lǐng)域發(fā)展很成熟的信息安全正在被運用到汽車開發(fā)中。智能駕駛的智能化程度越高,可能被黑客攻擊的點就越多,對信息安全的需求量更大。
這里需要強調(diào)一點,功能安全和SOTIF以人身安全為核心,但是不是所有的信息安全問題都會導(dǎo)致人身安全。換句話說,信息安全除了要考慮人身安全以外,還需要考慮黑客攻擊帶來的其他風險,比如車輛被偷導(dǎo)致的財產(chǎn)損失以及隱私泄露風險。

3.2. 信息安全的發(fā)展現(xiàn)狀
2020年車輛信息安全標準ISO 21434,Road Vehicle - Cybersecurity Engineering標準正式發(fā)布,該標準是基于SAE J3061制定的、針對車輛整個生命周期的標準。主要涵蓋安全管理、基于項目的網(wǎng)絡(luò)安全管理、持續(xù)的網(wǎng)絡(luò)安全活動、相關(guān)風險評估方法、以及道路車輛概念驗證階段,產(chǎn)品開發(fā)階段和開發(fā)完成后階段的網(wǎng)絡(luò)安全。
對于該標準如何落地,業(yè)界尚在摸索中。于此同時,信息安全既然也包括了對人身傷害的預(yù)防,那么必然和功能安全以及SOTIF有交集,如何將三者的開發(fā)有機聯(lián)系起來目前還沒有成熟的方案,這也是亟需解決的關(guān)鍵問題。
4. 結(jié)論和展望
通過上面的介紹可以看到,要保證智能汽車的安全性任重道遠。希望大家在重視智能汽車便利性的同時,也更多的關(guān)注智能汽車的安全性。畢竟安全是智能汽車的核心。只有建立在安全的基礎(chǔ)上,其他的技術(shù)才可以稱之為錦上添花而不是雞肋。
當然,我們也可以看到,在經(jīng)歷了初期的狂熱后,工程思維的理智慢慢將行業(yè)拉回腳踏實地的軌道。如今安全越來越受到汽車行業(yè)的重視,一大批工程師正在為智能駕駛的安全而努力,相信在未來足夠安全的智能汽車將“飛入尋常百姓家”,造福人類。
本文轉(zhuǎn)自:焉知自動駕駛,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。
- 用于自動駕駛,無人駕駛領(lǐng)域的IMU六軸陀螺儀傳感器:M-G370
- 自動駕駛芯片市場現(xiàn)狀和趨勢分析 4次下載
- 自動駕駛測試場景技術(shù)發(fā)展與應(yīng)用
- 自動駕駛汽車如何工作 有什么好處
- 案例研究:什么是自動駕駛
- 初識自動駕駛系統(tǒng)
- 自動駕駛如何落地 自動駕駛的商業(yè)模式與挑戰(zhàn)
- Autoware自動駕駛框架介紹
- 自動駕駛技術(shù)概述
- 自動駕駛算法軟件架構(gòu)介紹
- 自動駕駛開發(fā)平臺
- 高級安全駕駛員輔助系統(tǒng)為自動駕駛鋪平道路
- 一個自動駕駛出租車動態(tài)合乘的仿真系統(tǒng) 12次下載
- 2020年自動駕駛汽車技術(shù)報告 17次下載
- 自動駕駛商業(yè)化領(lǐng)導(dǎo)者-特斯拉 16次下載
- 聯(lián)網(wǎng)自動駕駛機器人的網(wǎng)絡(luò)安全 281次閱讀
- 怎么樣才能使用CAN智慧云提高自動駕駛的安全性 3689次閱讀
- 從ADAS邁向全自動駕駛所需的關(guān)鍵技術(shù)分析 1420次閱讀
- 自動駕駛汽車的7大誤解匯總 3254次閱讀
- 探討當前自動駕駛測試技術(shù) 4742次閱讀
- 中國自動駕駛發(fā)展如何2018中國自動駕駛市場專題分析詳細資料概述 4668次閱讀
- 自動駕駛測試驗證技術(shù)有哪些 5850次閱讀
- 解析自動駕駛解決方案優(yōu)劣和功能安全需求 4975次閱讀
- 從四個方面詳細解析自動駕駛感知環(huán)節(jié) 9678次閱讀
- 自動駕駛汽車硬件系統(tǒng)概述 7714次閱讀
- 用數(shù)據(jù)驅(qū)動的自動駕駛仿真測試讓自動駕駛變得更安全 2150次閱讀
- Uber自動駕駛事故原因解析_自動駕駛事故還有哪些 8692次閱讀
- 公布Uber視頻還原事故真相_自動駕駛安全嗎 3965次閱讀
- RSS模型,為自動駕駛汽車提供更加全面的安全保障 6262次閱讀
- 要保證自動駕駛汽車安全,這五件事必須做 1074次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1電子電路原理第七版PDF電子教材免費下載
- 0.00 MB | 1491次下載 | 免費
- 2單片機典型實例介紹
- 18.19 MB | 95次下載 | 1 積分
- 3S7-200PLC編程實例詳細資料
- 1.17 MB | 27次下載 | 1 積分
- 4筆記本電腦主板的元件識別和講解說明
- 4.28 MB | 18次下載 | 4 積分
- 5開關(guān)電源原理及各功能電路詳解
- 0.38 MB | 11次下載 | 免費
- 6100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 7基于單片機和 SG3525的程控開關(guān)電源設(shè)計
- 0.23 MB | 4次下載 | 免費
- 8基于AT89C2051/4051單片機編程器的實驗
- 0.11 MB | 4次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 2PADS 9.0 2009最新版 -下載
- 0.00 MB | 66304次下載 | 免費
- 3protel99下載protel99軟件下載(中文版)
- 0.00 MB | 51209次下載 | 免費
- 4LabView 8.0 專業(yè)版下載 (3CD完整版)
- 0.00 MB | 51043次下載 | 免費
- 5555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33562次下載 | 免費
- 6接口電路圖大全
- 未知 | 30320次下載 | 免費
- 7Multisim 10下載Multisim 10 中文版
- 0.00 MB | 28588次下載 | 免費
- 8開關(guān)電源設(shè)計實例指南
- 未知 | 21539次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935053次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537793次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234313次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191183次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183277次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138039次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論