 電子發燒友App
電子發燒友App












 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
無人駕駛汽車
無人駕駛汽車,又稱自動駕駛汽車或輪式移動機器人,是一種運輸動力的無人地面載具。我們理想的無人駕駛汽車是無需人類操作即能從地點A行駛到地點B,不管途中環境多復雜天氣多惡劣都由機器自己完成。無人駕駛汽車的核心在于無人駕駛技術,如果說汽車工業是制造業的皇冠,那么無人駕駛技術就是皇冠上的明珠。
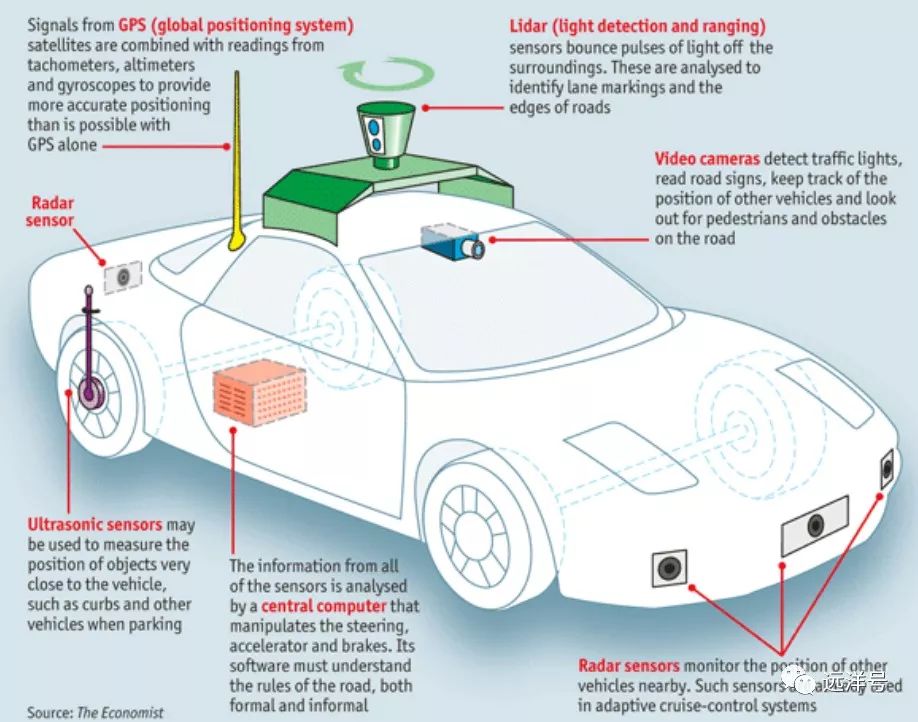
無人駕駛汽車需要多門技術整合才能實現,它并非是一項單一的新技術,其中包括雷達、激光雷達、攝像頭、GPS、計算機視覺、決策系統、操作系統、高精地圖、實時定位、機械控制、能耗散熱管理等等。盡管無人駕駛汽車看起來很科幻,但實際上夢想正在照進現實。

無人駕駛分級
針對無人駕駛汽車自動化的程度一般可以分為6個級別,按照自動化程度從低到高順序分別為Level 0 到Level 5。
Level 0:無任何自動化駕駛功能,行駛過程完全依靠人類司機控制汽車,包括汽車啟動、行駛過程中的各種環境狀況的觀察、各種操作決策等等。簡單來說,需要人類控制駕駛的汽車都屬于這個級別。
Level 1:單一功能自動化,行駛過程中將部分控制權交給機器管理,但是司機仍然需要把控整體。比如自適應巡航、應急剎車輔助、車道保持等等。司機手腳不能同時脫離控制系統。
Level 2:部分自動化,行駛過程中司機和汽車共享汽車控制權,在某些預設環境下司機能夠完全脫離控制系統,但司機需要隨時待命,且需要在短時間內接管汽車。
Level 3:有條件自動化,在有限情況下實現自動行駛。比如在高速路上機器完全負責整個汽車的操控,司機可以完全完全脫離控制系統,司機需要隨時待命,但有足夠的預警時間。
Level 4:高度自動化,在特定道路限定下行駛過程中無需司機介入。司機僅需要設置好起點和終點即可,剩下的交由汽車自行控制。
Level 5:完全自動化,在任何環境中行駛都無需司機介入。司機僅需要設置好起點和終點即可,剩下的交由汽車自行控制。
無線雷達
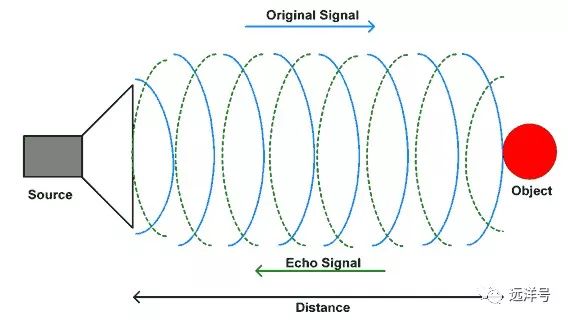
無線雷達(Radio Detection and Ranging)是汽車上很常見的組件,它的工作原理是發射出無線電波后經過遠處物體將無線電波反射回來從而達到探測效果。通過無線雷達能夠獲得物體的數量、大小、運動速度、運動方向等等信息,在無人駕駛領域它經常被用于自適應巡航和自動緊急制動場景。
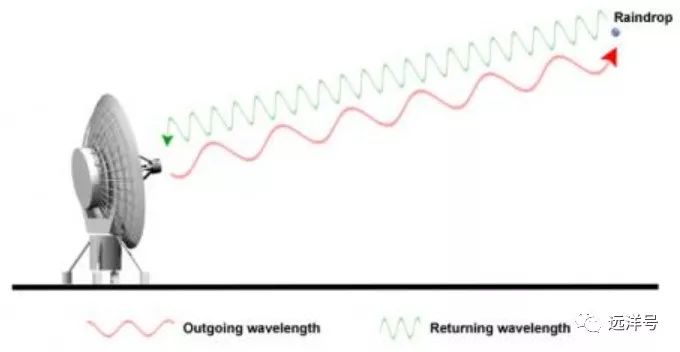
雷達向目標區域發出無線電波,某個物體將無線電波反射回來,便能夠計算兩者之間的距離。距離d=c?t/2,其中t為從無線電波發射到反射回來的時間間隔,c為光速(3?10的八次方米每秒)。
雷達可用來識別數百碼之外的物體,并且能夠檢測它的大小及運動速度。但它不能夠捕獲到物體的細節。
激光雷達
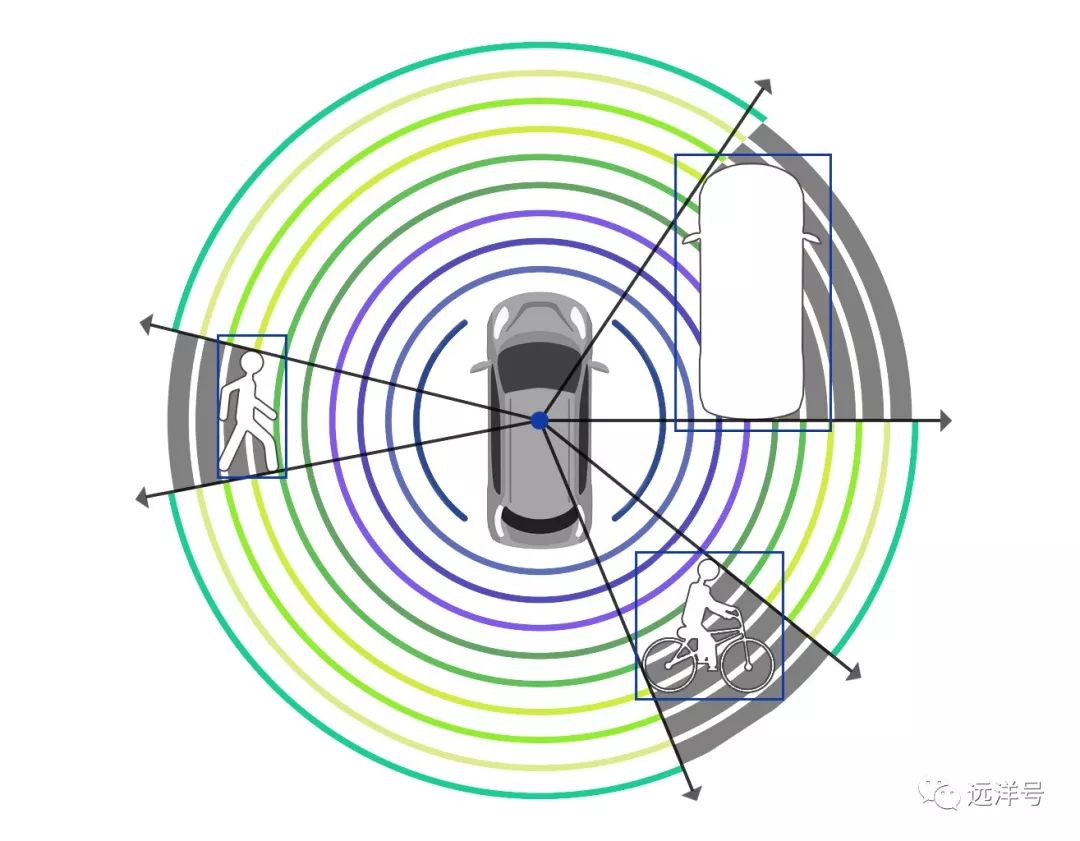
激光雷達LiDAR(Light Detection and Ranging),即激光探測及測距系統,是以發射激光束來探測物體的雷達系統。其工作原理是向目標物體發射大量激光束探測信號,然后接收器處理目標反射回來的信號即可獲得目標的有關信息,比如目標的距離、方位、高度、速度、姿態、甚至形狀等信息。無人駕駛汽車的激光雷達一般都安裝在車頂上,不斷地高速旋轉對周圍環境進行掃描,通過它能夠得到周圍物體的三維信息。
激光雷達
激光雷達的測量原理相對比較簡單,比如下圖中車上的激光雷達向目標物體發出一束激光,就可以通過光速來計算距離了,而加上光束的角度后則能得到更多指標。
對于實際立體物體,通過激光雷達對整個物體掃描就能夠形成3D點云。激光雷達對目標發射出多個光束,接收器接收反射回來的光束后對信號進行處理,從而形成3D點云。
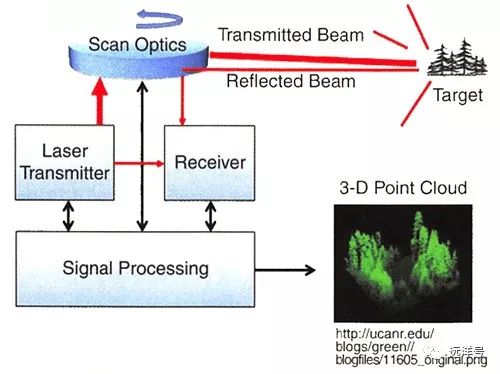
激光雷達提供了比無線雷達更高分辨率的解決方案,能比無線雷達捕獲更多信息。激光雷達造價貴,運行時需要不停旋轉,同時它無法在多霧多塵的天氣工作。
攝像頭
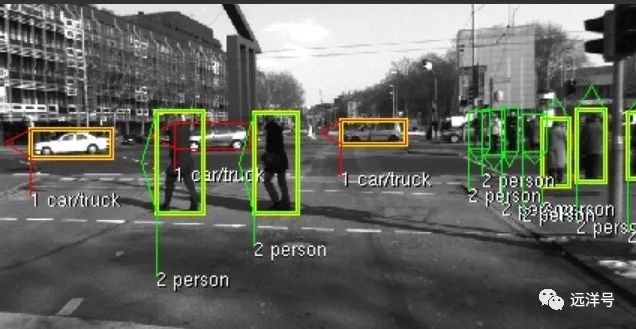
為了捕獲更多的圖像細節,我們需要在無人駕駛汽車上增加攝像頭,比如要識別公路上的路標。攝像頭能夠得到無人駕駛汽車周圍最準確的視圖,提供了最高分別率圖像。攝像頭受天氣影響很大,比如晚上攝像頭就影響很大。
對于捕獲到的圖像,要識別里面的物體就需要機器學習來加持。而目前流行的圖像識別使用的都是深度學習,核心就是卷積神經網絡。前面的神經網絡工作原理章節和深度學習原理章節已經講解了相關的原理,所以通過深度卷積神經網絡是對攝像頭收集的圖像進行處理的核心。
無人車經過攝像頭捕獲的鏡頭通過深度學習能夠識別出圖像中包含的物體,比如行人、行車、交通路標等等。對應計算機視覺的物體檢測與物體分類任務,經典的算法包括R-CNN、Faster R-CNN、SSD、YOLO等等。
超聲波雷達
除了以上傳感器外,無人駕駛汽車一般還會安裝有超聲波雷達。超聲波雷達又稱倒車雷達,很明顯它主要是為倒車做輔助的。它的工作原理是通過超聲波發射裝置向外發射超聲波,然后通過接收器接收反彈回來的超聲波,根據時間差來計算距離。距離d=343?時間/2,其中343位聲波速度,343m/s。超聲波雷達的探測范圍一般在幾米以內,探測精度較高,適合用于泊車。
GPS
GPS是最常用的定位技術,在無人駕駛汽車中會通過其進行定位。GPS的更新頻率為10Hz,所以它缺乏實時性。此外,GPS民用版的誤差能達到好幾米,所以完全靠GPS進行定位導航非常容易導致交通事故。
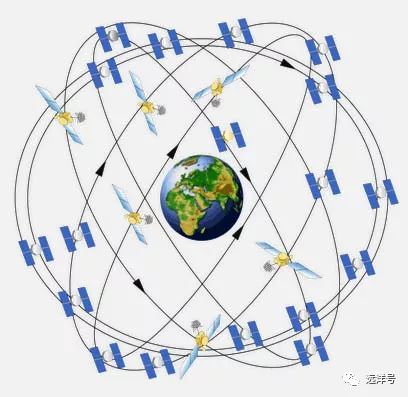
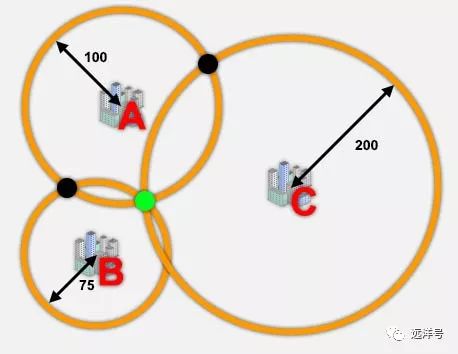
GPS的定位使用了三邊測量法,衛星與接收裝置之間的距離通過傳輸時間來測量距離,然后通過多顆衛星的位置便能夠計算接收裝置的位置,GPS一般會使用4顆以上的衛星來定位接受裝置的3D位置信息。
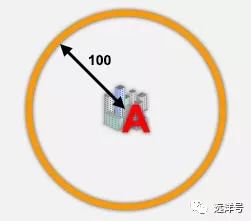
下面通過一個例子來理解2D的三邊測量法,比如你的位置與A衛星的距離為100km,則你可能的位置是在以A衛星為中心的一個圓上。
接著你又向另外一個衛星B發出無線信號,測量的距離時75km,則此時你的位置有兩種可能,就是兩個圓的相交點。
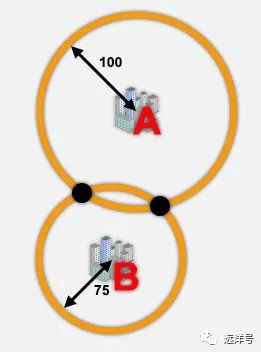
最后向衛星C發出無線信號,測量得出的距離為200km,此時三個圓的相交點就能唯一定位一個位置,這個位置即是你的位置。也就是說三個衛星就能確定一個平面上的點,只要坐標系建立起來便能得到詳細的xy值。
高精地圖
高精地圖是無人駕駛汽車重要的支撐,它包含了大量的行車輔助信息,除了能提供精確的定位外,它還能做智能避讓、智能調速等等。高精地圖能為無人車提供靜態的感知能力,為無人車提供全局視野,比如道路、交通、基礎設施等信息。
我們現在日常使用的電子地圖為傳統電子地圖,它能用于查詢地點和導航,主要面向人類駕駛員。而高精電子地圖則能提供比傳統電子地圖更多的信息,主要面向無人車。無人車車身上的傳感器能收集到的主要信息范圍都非常有限,而通過高精電子地圖則能夠將無人車的感知能力范圍大大延伸,而且能夠得到更多準確的信息。

高精地圖包含了很多輔助信息。比如包括車道的位置、寬度、斜度、類型、曲率等等公路數據信息。比如包括交通標識、信號燈、障礙物、道路限高、防護欄、樹、圍欄、地標等等環境數據信息。如果進一步對高精電子地圖的模型進行抽象,則可以得到更多無人車與車道、交通、基礎設施之間的信息。
相比于GPS,高精電子地圖能夠實現比GPS高10倍以上的精度,GPS精度一般在幾米,而高精地圖與傳感器協作則能使精度達到厘米級別。
慣性測量裝置
慣性測量裝置(IMU)是一種測量加速度與角速度的傳感器。無人車一般使用的是中低級慣性傳感器,更新頻率為1kHz,價格為幾千塊。慣性能協助無人車進行定位,但因為它的誤差會隨著時間而累積,所以只能用于很短時間內的定位。
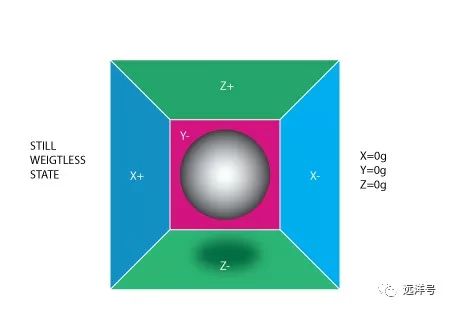
為了方便理解慣性測量裝置的加速度,我們可以將加速度計想象成一個箱子里面懸浮著一個球,它們處于無重力的太空中。當我們向左邊施加一個重力加速度(1g)時,球會向X-方向的壁平面產生1g的壓力,然后我們就能夠測量到x軸上的加速度為-1g。
慣性測量裝置還包含了角速度測量功能,陀螺可以繞著支點進行三個自由度的轉動。如下面的陀螺儀中間有一根豎軸穿過一個金屬圓盤,圓盤稱為轉子,豎軸為旋轉軸。為了增加慣性,轉子用質量大的金屬制成。豎軸外側由三層不同大小的圓環嵌套而成,擁有三個方向自由度。角速度的測量則主要是利用角動量守恒定理。
V2X與環境交互
V2X通信傳感是無人車與周圍環境的通信協議,包括車與車通信(Vehicle to Vehicle,V2V)、車與基礎設施通信(Vehicle to Infrastructure,V2I)、車與行人通信(Vehicle to Pedestrian,V2P)。
V2V通信指無人駕駛汽車之間進行信息交換,比如無人駕駛車之間交換交通狀況。V2I通信指無人駕駛汽車與基礎設施之間進行信息交換,比如智能停車場與無人駕駛汽車的通信。V2P通信指無人駕駛汽車與行人之間進行信息交換,比如通過智能手機應用與無人駕駛汽車通信。
路徑規劃
路徑規劃主要解決的問題是找到一條最快最安全的從起點到終點的路徑,路徑規劃中有很多成熟的算法,比如Dijkstra算法、A*算法、RRT算法等等。無人駕駛汽車的路徑規劃需要考慮多因素的影響,比如車禍路道、交通擁堵等。
總結
無人駕駛汽車的核心是感知能力,無人車有四種不同視野的眼睛,包括無線雷達、激光雷達、超聲波雷達和攝像頭,通過它們能得到不同的視野。在定位方面無人駕駛汽車使用GPS與慣性策略裝置,再加上高精電子地圖就能夠實現非常精準的定位。此外,為了能讓無人車與環境進行通信交互,V2X被提出來,包括V2V、V2I、V2P。
來源:遠洋號,作者:wj seaboat
原文鏈接:https://mp.weixin.qq.com/s/VAchQR-8q0bAMYg6SEAF1A
轉載此文目的在于傳遞更多信息,版權歸原作者所有。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 用于自动驾驶,无人驾驶领域的IMU六轴陀螺仪传感器:M-G3700次下载
- 32.768K晶振X1A000141000300适用于无人驾驶汽车电子设备0次下载
- 无人驾驶汽车的路径规划与跟随控制算法案例3次下载
- 基于矢量传感器的无人驾驶汽车信号远程监测系统19次下载
- 机器学习算法如何用于制造无人驾驶汽车资料下载42次下载
- 无人驾驶汽车模型预测控制相关源代码29次下载
- 无人驾驶汽车的未来仿真如何22次下载
- 坚固耐用型服务器为无人驾驶汽车铺平了道路2次下载
- 无人驾驶汽车的来源及其四个阶段技术特征的详解18次下载
- 无人驾驶之光学雷达技术探究3次下载
- 介绍ADAS与无人驾驶的关系10次下载
- 无人驾驶汽车与高清地图的来临5次下载
- 全方面帮你了解自动驾驶24次下载
- 无人驾驶要收集多少数据才够?17次下载
- 无人驾驶技术及产业链精华集锦46次下载
- 无人驾驶汽车的发展前景详细说明14189次阅读
- 无人驾驶汽车有什么优点和缺点92439次阅读
- 无人驾驶汽车的工作原理和特点详细说明26395次阅读
- 无人驾驶汽车的发展前景分析14753次阅读
- 无人驾驶汽车是如何工作的?7369次阅读
- 在无人驾驶车里玩游戏:VR+无人驾驶是怎么样的体验10230次阅读
- 详细无人驾驶汽车的关键技术——LiDAR17207次阅读
- 无人驾驶汽车技术_无人驾驶汽车关键技术_无人驾驶汽车技术原理29880次阅读
- 无人驾驶技术原理_无人驾驶技术的应用_无人驾驶技术的现状及发展(前景)47247次阅读
- 无人驾驶汽车上市了吗_无人驾驶汽车何时上市40527次阅读
- 无人驾驶汽车的特点及利弊92423次阅读
- 无人驾驶技术哪家厉害_美国无人驾驶技术领先中国多少?13368次阅读
- 无人驾驶汽车技术原理与实现31546次阅读
- 无人驾驶关键技术分析22460次阅读
- 无人驾驶如何前行?811次阅读

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1STM32開發板教程之STM32開發指南免費下載
- 24.88 MB | 176次下載 | 3 積分
- 2EN60335-1安規標準 中文版本
- 1.86 MB | 52次下載 | 1 積分
- 3LT7406FJ N溝道增強型功率MOSFET規格書
- 1.38 MB | 2次下載 | 免費
- 4STM32系列產品選型-中文
- 1.81 MB | 1次下載 | 免費
- 5LTS6802FJCB N溝道增強型功率MOSFET規格書
- 1.00 MB | 1次下載 | 免費
- 6運算放大電路入門教程
- 0.70 MB | 1次下載 | 免費
- 7米爾-瑞芯微RK3562核心板開發板,4核CPU,ARM中量級多面手
- 3.45 MB | 1次下載 | 免費
- 8開源鴻蒙版真4K顯示器廣告機主板AIoT-6780SE彩頁
- 613.79 KB | 1次下載 | 免費
本月
- 1STM32開發板教程之STM32開發指南免費下載
- 24.88 MB | 176次下載 | 3 積分
- 2DeepSeek:從入門到精通
- 5.36 MB | 92次下載 | 1 積分
- 3EN60335-1安規標準 中文版本
- 1.86 MB | 52次下載 | 1 積分
- 4OAH0428最新規格書(中文)
- 2.52 MB | 27次下載 | 10 積分
- 5UHV系列雷電沖擊電壓發生器試驗裝置詳細說明使用
- 1.07 MB | 17次下載 | 免費
- 6Altium-常用3D封裝庫(Step)接插件篇
- 4.95 MB | 14次下載 | 免費
- 7介紹一些常用的電子元器件
- 3.20 MB | 7次下載 | 免費
- 8麻將機升降電路
- 0.12 MB | 6次下載 | 1 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935124次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420063次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191371次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183336次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81583次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論