 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
PCB圖如下: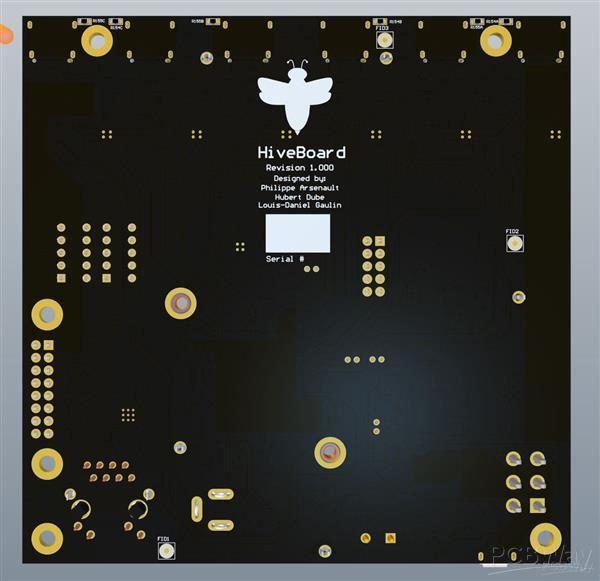
描述
SwarmUS - 一個(gè)群體機(jī)器人平臺(tái)
團(tuán)隊(duì)
SwarmUS 是一個(gè)由 9 名來(lái)自舍布魯克大學(xué)的工程專業(yè)學(xué)生組成的團(tuán)隊(duì),他們的學(xué)士學(xué)位畢業(yè)時(shí)間定于 2021 年 12 月結(jié)束。SwarmUS 在工程領(lǐng)域擁有多學(xué)科專業(yè)知識(shí),因?yàn)槠涑蓡T來(lái)自計(jì)算機(jī)、電氣和機(jī)器人工程。
該項(xiàng)目
該項(xiàng)目旨在建立一個(gè)開(kāi)放的軟件和硬件平臺(tái)(分別為 Hivemind 和 Hiveboard),允許實(shí)施機(jī)器人群,從異構(gòu)機(jī)器人和 Android 智能手機(jī)進(jìn)行同步定位和映射 (SLAM)[1]。Android 手機(jī)可以用作增強(qiáng)現(xiàn)實(shí)界面來(lái)查看生成的共享地圖,也可以用作機(jī)器人群的控制界面。這項(xiàng)技術(shù)突破正在一個(gè)重大工程設(shè)計(jì)項(xiàng)目中進(jìn)行,并將在 2021 年 MegaGéNIALE 博覽會(huì)上展示。該項(xiàng)目本質(zhì)上是學(xué)術(shù)性的,將由機(jī)器人研究小組 IntRoLab[3] 的 3IT[2] 的客戶使用。
什么是 MégaGéNIALE 博覽會(huì)?
MégaGéNIALE Expo 是加拿大最大的大學(xué)工程項(xiàng)目展覽。這是一個(gè)獨(dú)特的機(jī)會(huì)來(lái)發(fā)現(xiàn)每個(gè)工程領(lǐng)域的畢業(yè)生的工作,即:建筑、土木、化學(xué)、生物技術(shù)、電氣、計(jì)算機(jī)、機(jī)械和機(jī)器人技術(shù)。該活動(dòng)每年吸引約 4,000 人參加。有關(guān)活動(dòng)的更多信息和往年活動(dòng)的照片,請(qǐng)?jiān)L問(wèn)以下頁(yè)面:
機(jī)器人部分
先鋒 2DX 機(jī)器人
SwarmUS 團(tuán)隊(duì)的任務(wù)是更新其客戶實(shí)驗(yàn)室 (IntRoLab) 未使用的兩臺(tái)舊 Pioneer 2DX。這些機(jī)器人不僅會(huì)返還給客戶,還會(huì)作為基準(zhǔn)測(cè)試來(lái)測(cè)試我們的 swarm 平臺(tái)。由于這些機(jī)器人的電子設(shè)備和軟件已經(jīng)過(guò)時(shí),因此需要對(duì)該機(jī)器人進(jìn)行全面升級(jí),只保留底盤和電機(jī)。

力量
機(jī)器人由 12V GOOLOO GP37-Plus LiPo 電池供電。這些電池具有一些內(nèi)部保護(hù)和集成充電器,從而簡(jiǎn)化了圍繞機(jī)器人電源的設(shè)計(jì)。但是,需要額外的欠壓保護(hù),以防止機(jī)器人將電池電量耗盡至低于 LiPo 電池的電壓限制。
欠壓鎖定板
然后,該團(tuán)隊(duì)設(shè)計(jì)了一個(gè)包含欠壓鎖定 (UVLO) 和電壓監(jiān)控電路的定制 PCB。該解決方案在電壓降至選定閾值以下時(shí)會(huì)發(fā)出高音,并在另一個(gè)較低閾值以下打開(kāi)主電源繼電器。
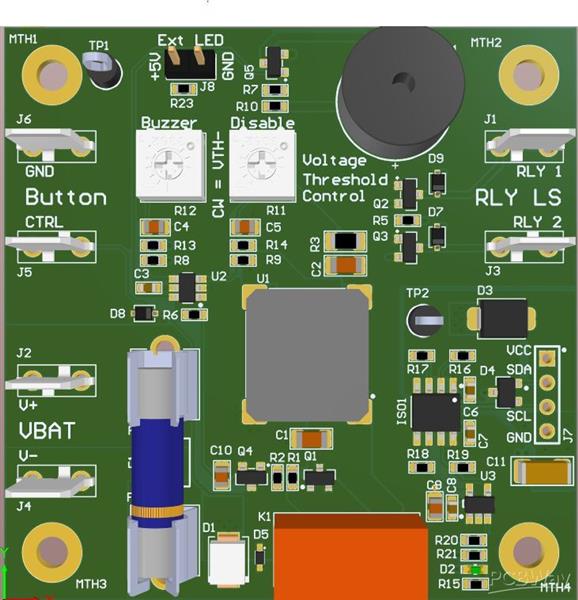
電力調(diào)配
電源樹分為 3 個(gè)主要部分:12V 主電源、12V 電機(jī)電源和 5V 計(jì)算機(jī)電源。一個(gè)由撥動(dòng)開(kāi)關(guān)和 UVLO 板控制的主繼電器將電池連接到 12V 主電源,該主電源反過(guò)來(lái)為 5V@5A 穩(wěn)壓器和另一個(gè)控制電機(jī)電源的繼電器供電。電機(jī)繼電器由紅色蘑菇按鈕控制,可在緊急情況下輕松切斷電機(jī)的 12V 電源。5V 穩(wěn)壓器為主計(jì)算機(jī)和所有機(jī)器人傳感器供電。

傳感器、計(jì)算機(jī)和電機(jī)控制器
機(jī)器人大腦是在 Linux 20.04.1 LTS 上運(yùn)行的 Raspberry Pi 4 4GB。為了感知其環(huán)境,機(jī)器人配備了 RPLidar A2M8 以可視化其周圍的障礙物,并配備了 Realsense D435i 或 Realsense D455,具體取決于機(jī)器人,以獲得其前方場(chǎng)景的視覺(jué)和深度信息。除了傳感器之外,BasicMicro 的 RoboClaw 2x60A 還用作電機(jī)控制器,因?yàn)樗哂袃?nèi)置保護(hù)、PID 控制和正交編碼器讀取功能。電機(jī)控制器和所有傳感器通過(guò) USB 連接到 Rasberry Pi。此外,Hiveboard 和 BeeBoards 被集成到機(jī)器人中,并通過(guò)以太網(wǎng)連接到 Raspberry Pi,為機(jī)器人提供必要的硬件來(lái)加入一個(gè)群體。

機(jī)械改裝
電子元件和計(jì)算機(jī)由采用激光切割技術(shù)制成的木板進(jìn)行維護(hù),以完美貼合機(jī)器人狹窄的內(nèi)部。機(jī)器人的傳感器支撐和側(cè)面板是 3D 打印的,為我們?cè)谠O(shè)計(jì)過(guò)程中提供了更大的靈活性。
機(jī)器人軟件
Raspberry Pi 在 ROS(機(jī)器人操作系統(tǒng))中間件中運(yùn)行所有機(jī)器人的軟件。在傳感器、導(dǎo)航堆棧和 RTAB-Map 的幫助下,機(jī)器人可以在其環(huán)境中移動(dòng),同時(shí)對(duì)其進(jìn)行映射并在其中定位自己。團(tuán)隊(duì)制作了額外的 ROS 包,以將 ROS 環(huán)境連接到在 HiveBoard 上運(yùn)行的 HiveMind,讓群體行為控制機(jī)器人。
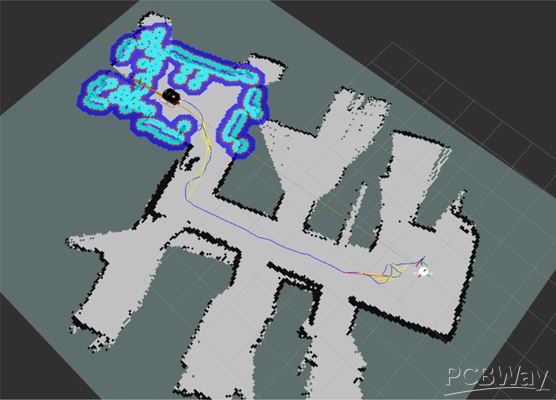
我們的一個(gè)機(jī)器人制作的地圖
硬件部分
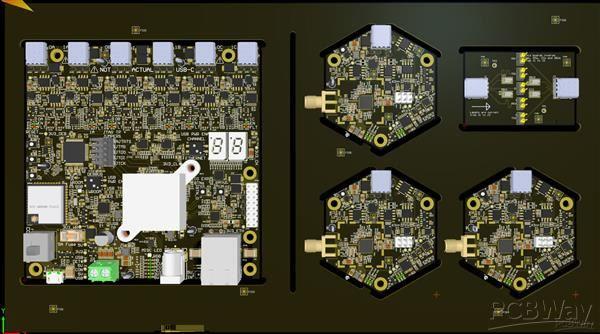
以下部分將詳細(xì)介紹 SwarmUS 項(xiàng)目的 3 塊 PCB:
· HiveSight:Decawave 超寬帶 (UWB) 集成電路 (IC) DW1000 的測(cè)試平臺(tái)
· Hiveboard:上一次迭代的中心板
· BeeBoard:UWB“傳感器”
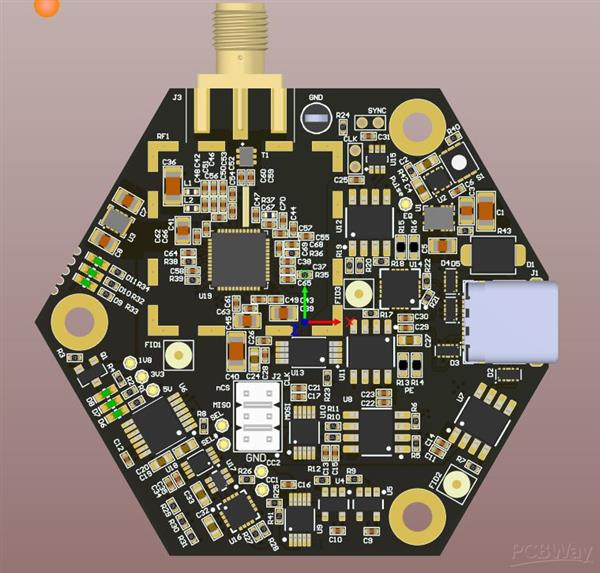
HiveSight
如前所述,HiveSight 是團(tuán)隊(duì)的測(cè)試平臺(tái)。它證實(shí)該團(tuán)隊(duì)可以使用我們可以使用的設(shè)施來(lái)制作功能正常的 PCB(從設(shè)計(jì)到測(cè)試)。它也是 UWB 技術(shù)的測(cè)試平臺(tái)。讓我們回顧一下董事會(huì):
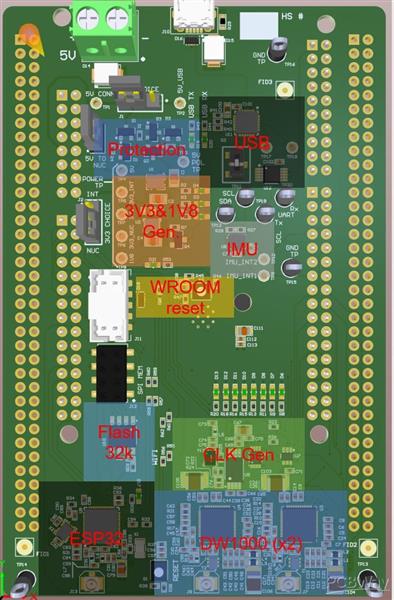
1、保護(hù):具有過(guò)壓、過(guò)流、反極性功能
2. USB:USB IC打開(kāi)一個(gè)COM端口用于調(diào)試目的。它連接到 u-USB 端口
3. 3V3&1V8 Gen:板載 3v3 和 1v8 電源軌生成。1.8V 來(lái)自 3.3V 電源軌。板上的所有組件都使用 3.3V 電源軌。只有 Decawave IC DW1000 使用 1.8V 電源軌。
4. IMU:慣性測(cè)量單元
5. WROOM 復(fù)位:ESP32-WROOM 的物理按鈕(位于 PCB 的底部) ESP32-WROOM 是一個(gè) Wi-Fi IC。
6. Flash 32k:32 Kb閃存。由我們的 ESP32 定制解決方案使用。
7. ESP32:ESP32(Wi-Fi IC)的自定義實(shí)現(xiàn)。此實(shí)現(xiàn)用于在我們的自定義實(shí)現(xiàn)和 WROOM IC 之間進(jìn)行比較。
8. CLK Gen:為 DW1000 生成 38.4MHz 時(shí)鐘。還包括兩個(gè) DW1000 的同步信號(hào)。
9. DW1000:超寬帶IC。用于定位其他 HiveSight 的距離和角度。每個(gè) DW100 有 4 個(gè) LED 用于調(diào)試目的。
我們對(duì) DW1000s 的實(shí)施基于 decawave 發(fā)布的白皮書,并且在我編寫這些行時(shí)正在由我們的團(tuán)隊(duì)進(jìn)行測(cè)試。但是,我們確實(shí)設(shè)法在設(shè)計(jì)中發(fā)現(xiàn)了一些錯(cuò)誤。
5V 電源軌可以來(lái)自 2 個(gè)不同的地方:
· 從左上角的綠色連接器
· 從 u-USB 連接器
此外,3.3V 電源可以來(lái)自 3V3 電源軌或由 Nucleo 供電。Hivesight 還可以為 Nucleo 提供 5V 或 3.3V 電壓。然而,在測(cè)試我們的設(shè)計(jì)時(shí),我們注意到當(dāng) Nucleo 向 HveSight 提供 3V3 電壓時(shí),它會(huì)閃爍過(guò)電流警告。我們建議為 HiveSight 使用單獨(dú)的(如綠色連接器/u-USB 連接器)電源。
HiveSight 和 Nucleo 之間的 SPI 通信有點(diǎn)不足,因?yàn)槲覀冊(cè)诓季€時(shí)沒(méi)有正確處理 SPI 線路(從上到下變化太多),并且接地回路不是最小的。我們沒(méi)有正確連接 HiveSight 的每個(gè)連接器的接地,這會(huì)減慢 SPI 總線。我們可以做的總線的最大速度是 1Mbit/s 的數(shù)據(jù)。
到COM口IC的USB線切換了正負(fù)數(shù)據(jù)線,導(dǎo)致COM口出錯(cuò)。我們建議通過(guò)移除 ESD 保護(hù)并焊接一些導(dǎo)線來(lái)更改設(shè)計(jì)或以正確的順序放置數(shù)據(jù)線。在我們的實(shí)現(xiàn)中,這是我們使用的方法,并在頂部涂上熱膠以防止意外斷開(kāi)連接。

此外,IMU 從未安裝在我們的版本上,因?yàn)樽阚E沒(méi)有焊膏開(kāi)口,因此沒(méi)有焊料,并且該部件從未連接到電路板。這個(gè)簡(jiǎn)單的錯(cuò)誤將在下一個(gè)實(shí)現(xiàn)中修復(fù):Hiveboard。
HiveSight 設(shè)計(jì)用于與 STM32F429ZIT Nucleo 一起使用(盡管絲印上提到了 STM32F426,這是我們的另一個(gè)錯(cuò)誤)。
所有文件(原理圖、BOM、PCB、Gerbers)都在 Github 鏈接中。
更多詳情:https ://github.com/SwarmUS
代碼
Git 上的代碼
https:///www.github.com/swarmus
- Hoverboard轉(zhuǎn)換為Ai機(jī)器人平臺(tái)或RC-Vehikel
- AUTO CUBEROS機(jī)器人開(kāi)發(fā)平臺(tái) 2次下載
- 用于TI RSLK MAX機(jī)器人平臺(tái)的IR RX/TX BoosterPack
- SwarmUS異構(gòu)機(jī)器人平臺(tái)
- 基于DSP和PC的農(nóng)業(yè)機(jī)器人控制系統(tǒng) 17次下載
- 機(jī)器人操作系統(tǒng)的資料簡(jiǎn)介 13次下載
- 如何實(shí)現(xiàn)雙足機(jī)器人的步態(tài)規(guī)劃與仿真研究 15次下載
- 一種小型雙足人形機(jī)器人平臺(tái)的研究與開(kāi)發(fā) 14次下載
- 競(jìng)賽機(jī)器人制作技術(shù)PDF電子書免費(fèi)下載 44次下載
- 詳解圖靈機(jī)器人,國(guó)內(nèi)最早開(kāi)放的人工智能機(jī)器人平臺(tái) 0次下載
- 中型自主式足球機(jī)器人平臺(tái)設(shè)計(jì) 0次下載
- 嵌入式智能機(jī)器人平臺(tái)研究 11次下載
- RoboCup Rescue 平臺(tái)搭建及運(yùn)行 8次下載
- 基于RTOS的機(jī)器人平臺(tái)控制系統(tǒng) 41次下載
- 基于C8051F020 的遙控機(jī)器人平臺(tái)控制系統(tǒng)設(shè)計(jì)
- 使用Simulink和Simscape構(gòu)建人形機(jī)器人頭部的數(shù)字孿生 905次閱讀
- 如何使用DonkeyCar平臺(tái)構(gòu)建一個(gè)自主機(jī)器人 2114次閱讀
- 基于嵌入式處理器S698-T芯片實(shí)現(xiàn)機(jī)器人移動(dòng)平臺(tái)電控系統(tǒng)的設(shè)計(jì) 3758次閱讀
- 面對(duì)疫情 醫(yī)療機(jī)器人能幫上什么忙? 2126次閱讀
- dfrobotGMR通用機(jī)器人擴(kuò)展板簡(jiǎn)介 1431次閱讀
- dfrobot迷你十字套筒簡(jiǎn)介 1229次閱讀
- dfrobotDevastator履帶機(jī)器人移動(dòng)平臺(tái)簡(jiǎn)介 1515次閱讀
- dfrobotDevastator履帶機(jī)器人移動(dòng)平臺(tái)簡(jiǎn)介 1471次閱讀
- dfrobot切諾基4WD智能機(jī)器人開(kāi)發(fā)平臺(tái)介紹 1458次閱讀
- ATRIAS機(jī)器人可以像人類一樣行走,完美跨越 5974次閱讀
- 基于工業(yè)互聯(lián)網(wǎng)平臺(tái)的工業(yè)機(jī)器人故障檢測(cè)方案規(guī)劃 1w次閱讀
- 機(jī)器人如何識(shí)別顏色 2.5w次閱讀
- 基于三軸臺(tái)式工業(yè)機(jī)器人平臺(tái)的通用性控制軟件 4027次閱讀
- 機(jī)器人系統(tǒng)常用仿真軟件介紹和效果 8375次閱讀
- 如何使用HRMRP機(jī)器人平臺(tái)構(gòu)建機(jī)器人應(yīng)用系統(tǒng) 1629次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1Keysight B1500A 半導(dǎo)體器件分析儀用戶手冊(cè)、說(shuō)明書 (中文)
- 19.00 MB | 4次下載 | 免費(fèi)
- 2使用TL431設(shè)計(jì)電源
- 0.67 MB | 2次下載 | 免費(fèi)
- 3BT134雙向可控硅手冊(cè)
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務(wù)器電源系統(tǒng)
- 0.85 MB | 1次下載 | 1 積分
- 5LabVIEW環(huán)形控件
- 0.01 MB | 1次下載 | 1 積分
- 6PR735,使用UCC28060的600W交錯(cuò)式PFC轉(zhuǎn)換器
- 540.03KB | 1次下載 | 免費(fèi)
- 751單片機(jī)核心板原理圖
- 0.12 MB | 1次下載 | 5 積分
- 8BP2879DB支持調(diào)光調(diào)滅的非隔離低 PF LED 驅(qū)動(dòng)器
- 1.44 MB | 1次下載 | 免費(fèi)
本月
- 1開(kāi)關(guān)電源設(shè)計(jì)原理手冊(cè)
- 1.83 MB | 54次下載 | 免費(fèi)
- 2FS5080E 5V升壓充電兩串鋰電池充電管理IC中文手冊(cè)
- 8.45 MB | 23次下載 | 免費(fèi)
- 3DMT0660數(shù)字萬(wàn)用表產(chǎn)品說(shuō)明書
- 0.70 MB | 13次下載 | 免費(fèi)
- 4UC3842/3/4/5電源管理芯片中文手冊(cè)
- 1.75 MB | 12次下載 | 免費(fèi)
- 5ST7789V2單芯片控制器/驅(qū)動(dòng)器英文手冊(cè)
- 3.07 MB | 11次下載 | 1 積分
- 6TPS54202H降壓轉(zhuǎn)換器評(píng)估模塊用戶指南
- 1.02MB | 8次下載 | 免費(fèi)
- 7STM32F101x8/STM32F101xB手冊(cè)
- 1.69 MB | 8次下載 | 1 積分
- 8基于MSP430FR6043的超聲波氣體流量計(jì)快速入門指南
- 2.26MB | 7次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開(kāi)源硬件-PMP21529.1-4 開(kāi)關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論