 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
嗨,朋友們,你們好嗎-:) 希望你們一切都好,今天我?guī)砹艘粋€(gè)很酷的新項(xiàng)目
今天我將使用NodeMCU ESP8266(12e)制作無人機(jī),我們使用esp8266作為飛行控制器
飛控板
這是從地面控制無人機(jī)的最重要的事情之一。市場上有許多飛行控制板。其中有些是開源的,有些不是。以下列表包含最著名和最受好評的飛行控制器:
- KK 2.0 (亞馬遜)
- DJI A3(亞馬遜)
- LUX 飛行控制器(Amazon.com )
- DJI Nava M(亞馬遜)
- 3DR Pixhawk(亞馬遜網(wǎng)站)
- 矢量 ( Amazon.com )
- ArduPilot(亞馬遜網(wǎng)站)
- 親吻(亞馬遜網(wǎng)站)
- Naze32(亞馬遜網(wǎng)站)
- CC3D (亞馬遜)
謝謝 NextPCB
本項(xiàng)目的順利完成,得益于 NextPCB 的幫助和支持。伙計(jì)們,如果您有 PCB 項(xiàng)目,請?jiān)L問他們的網(wǎng)站并獲得令人興奮的折扣和優(yōu)惠券。
第 1 步:組件
Esp8266 12e(亞馬遜)
Mpu6050(亞馬遜)
無人機(jī)套件(Amazon.com )
第 2 步:什么是 ESP8266?

基本上,ESP8266 是一個(gè) Wi-Fi 模塊。它具有 2.4 GHz Wi-Fi 的能力,即 802.11 b/g/n。它支持 WPA 和 WPA2。
它是一個(gè)集成了 32 位處理器的片上系統(tǒng),運(yùn)行頻率為 80 MHz(也可以超頻至 160 MHz)。它有 64 KB 的 RAM 和 64 KB 的引導(dǎo) ROM。
ESP8266 的數(shù)據(jù) RAM 為 96 KB。它便宜、小巧、功能強(qiáng)大。這就是為什么每個(gè)人都將它用于不同類型的項(xiàng)目。
您幾乎可以在任何需要使物聯(lián)網(wǎng)無線化和智能化的地方使用 ESP8266。
第 3 步:無線電發(fā)射器和接收器?

發(fā)射器所做的就是向接收器發(fā)送信號。接收器接收到這個(gè)信號并根據(jù)來自發(fā)射器的命令進(jìn)行操作。由于無人機(jī)漂浮在天空中,它需要發(fā)送信號來命令無人機(jī)移動或做某事。
無線電控制器通常由發(fā)射器和接收器組成,它們通常在不需要低功率發(fā)射器許可的無線電頻率上運(yùn)行
較舊的發(fā)射器/接收器組合使用 MHz 頻段中的頻率,例如用于模型飛機(jī)的 72MHz 頻段和用于地面車輛的 75MHz 頻段。
這些頻段中的每一個(gè)都被劃分為單獨(dú)的頻道,您需要找到一個(gè)未使用的頻道來操作您的飛機(jī)或車輛。如今,在 2.4GHz 頻段中使用“擴(kuò)頻”無線電更為常見。擴(kuò)頻技術(shù)的使用消除了選擇頻道的需要。
因此,如果飛行員從發(fā)射器向無人機(jī)發(fā)出命令,無人機(jī)通過接收器接收到它,飛行控制器會根據(jù)飛行員的命令處理信號并執(zhí)行操作。
頻道
不要與舊設(shè)備中使用的單個(gè)射頻頻道相混淆,在本文中,“頻道”是指控制頻道。這些渠道中的每一個(gè)都與兩件事相關(guān):
- RC 控制器上的開關(guān)、操縱桿、電位計(jì)或顯示器。
- 接收器上的輸出或輸入。
發(fā)射模式
在描述 RC 發(fā)射器時(shí),您會看到這個(gè)術(shù)語。術(shù)語“模式”通常適用于在飛機(jī)上使用發(fā)射器,它指的是發(fā)射器如何配置以控制飛機(jī),即在飛機(jī)上哪個(gè)搖桿操作哪個(gè)控制。
標(biāo)準(zhǔn)發(fā)射器有兩個(gè)搖桿,每個(gè)搖桿都可以水平和垂直移動。因此,每根搖桿都有兩個(gè)通道,一個(gè)用于水平運(yùn)動,另一個(gè)用于垂直運(yùn)動。
共有四種 TX 模式:
- 模式 1 – 左搖桿操作升降舵和方向舵,右搖桿操作油門和副翼。
- 模式 2 - 左搖桿操作油門和方向舵,右搖桿操作升降舵和副翼。
- 模式 3 - 左搖桿操作升降舵和副翼,右搖桿操作油門和方向舵。
- 模式 4 – 左搖桿操作油門和副翼,右搖桿操作升降舵和方向舵。
接收者
Flysky FS-I6X 附帶的接收器是一個(gè) 6 通道單元,即 FS-IA6B。該設(shè)備有兩個(gè)小線天線、七個(gè)用于輸入/輸出設(shè)備的 3 針連接器,以及兩個(gè)用于 iBUS 發(fā)送和接收連接的附加 3 針連接器。(Flysky 提供了一個(gè)可用于完成此操作的跳線。)
第 4 步:偏航、俯仰、滾動
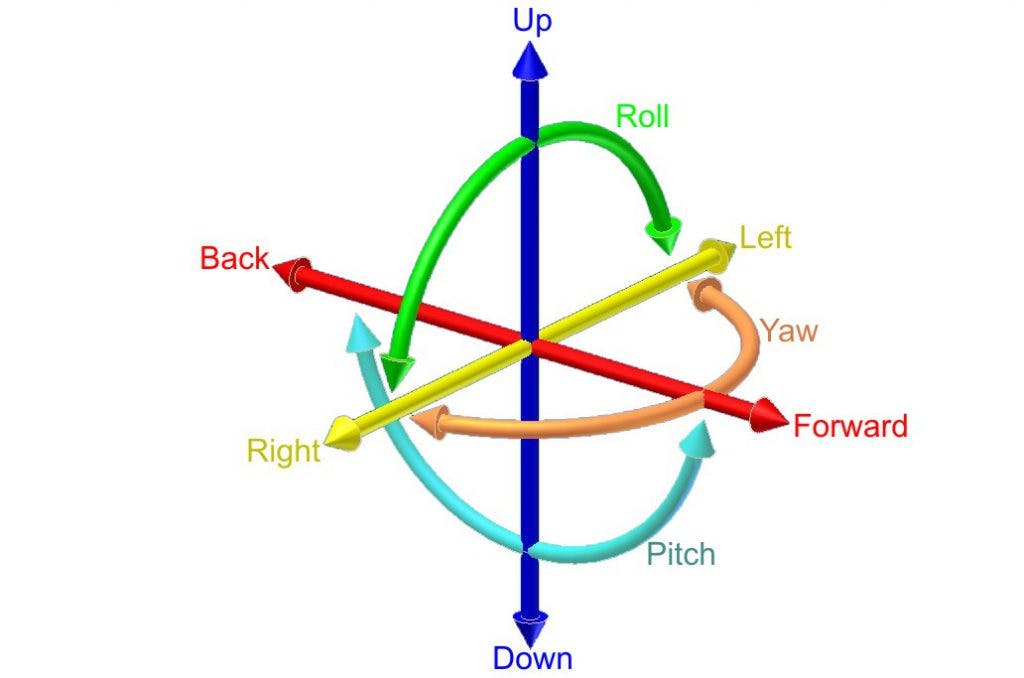
偏航
Yaw 是無人機(jī)在 xy 平面上的運(yùn)動,也就是如上圖所示的水平面。相反的一對螺旋槳會產(chǎn)生反作用力。如果每個(gè)螺旋槳的所有運(yùn)動的總和彼此相等,則沒有偏航運(yùn)動。但是如果任意一對螺旋槳有不同的運(yùn)動,就會有偏航運(yùn)動,無人機(jī)就會運(yùn)動,如下圖所示:
如果無人機(jī)只是沿 z 方向旋轉(zhuǎn),則稱為偏航運(yùn)動。如果有穩(wěn)定的向上力并且螺旋槳力如下:
下面是螺旋槳的運(yùn)動......
瀝青
這會在側(cè)軸上移動四軸飛行器,因此它會從前到后上下傾斜。通過這樣做,它會導(dǎo)致車輛根據(jù)傾斜的方式向前或向后移動。
一個(gè)很好的類比是在使用“是”手勢時(shí)上下點(diǎn)頭。
卷
這會在長(縱向)軸上移動 Quadcopter,因此它會左右傾斜。
第 5 步:電池、車架、電機(jī)、螺旋槳和電調(diào)
沒有電池,無人機(jī)毫無用處。所有電機(jī)、飛行控制器、無線電和處理都需要電源。
但使用笨重的電池來駕駛無人機(jī)并不是一個(gè)明智的決定,因?yàn)榇蟛糠帜芰繉⒒ㄙM(fèi)在無人機(jī)飛行的推力上。所以,我們需要選擇輕便但功能強(qiáng)大的電池。
在無人機(jī)中,我們通常使用鋰聚合物電池。
為無人機(jī)選擇合適的電池是最關(guān)鍵的事情之一。在為您的無人機(jī)選擇電池之前,請記住以下事項(xiàng):
- 電池尺寸和重量
- 電池放電率
- 電池容量
- 電池電壓
- 電池連接器
您可以借助以下公式輕松計(jì)算電池的連續(xù)電流輸出。如果當(dāng)前...
您如何為您的無人機(jī)或四軸飛行器選擇合適的 LIPO?
只有在您知道要購買哪種無人機(jī),或者您知道要為您的四軸飛行器使用哪種電機(jī)、電子速度控制器 (ESC) 和螺旋槳時(shí),才能為您的無人機(jī)或四軸飛行器選擇合適的 LiPo。
以下是為您的四軸飛行器選擇正確 LiPo 的指南:
? 3 英寸四軸飛行器:450 – 850mAh
? 4 英寸四軸飛行器:850 – 1300mAh
? 5 英寸四軸飛行器:1300 – 1800mAh
? 6 英寸四軸飛行器:1500 – 2200mAh
? 7 英寸四軸飛行器:1800 – 3200mAh
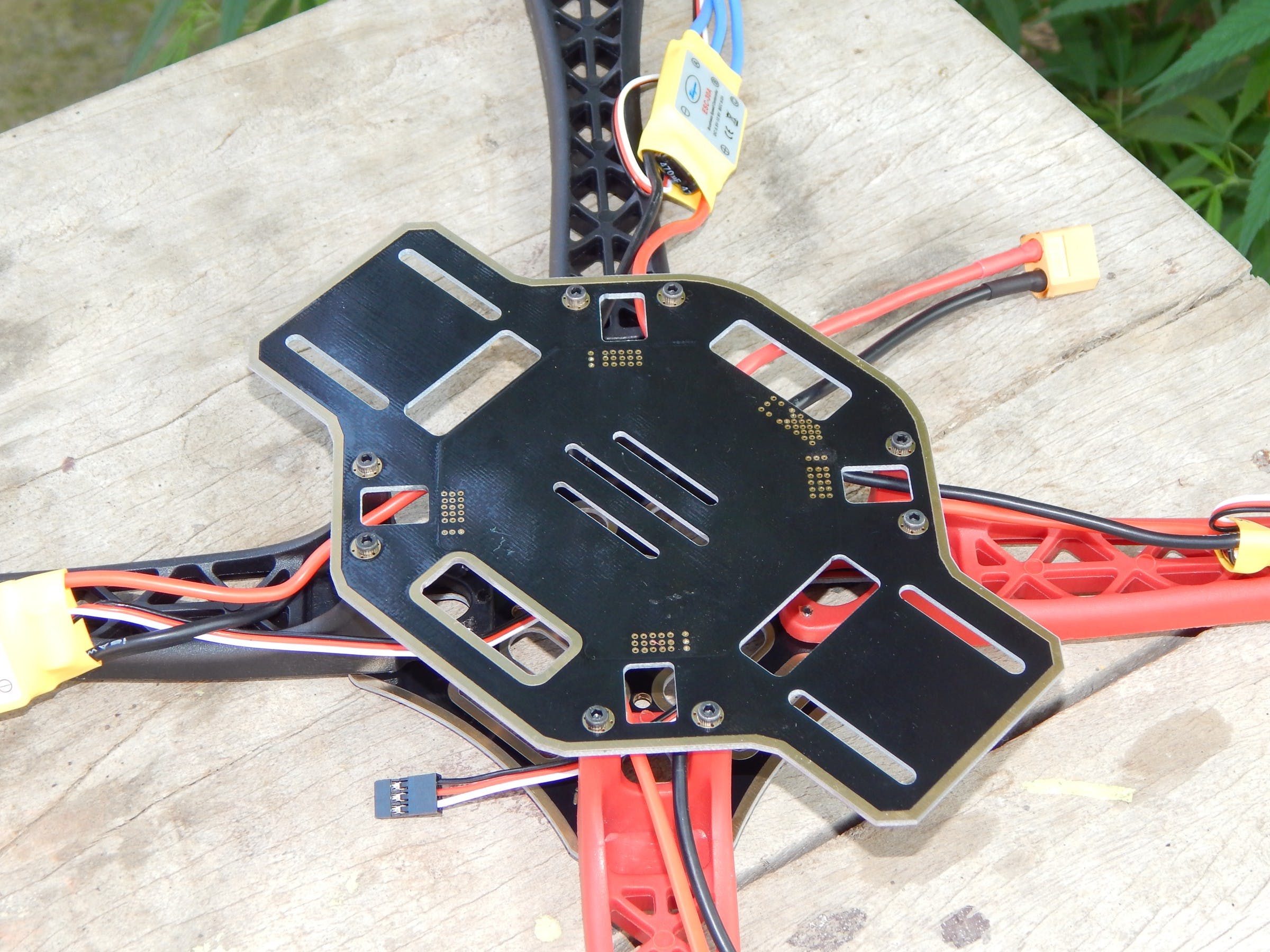
無人機(jī)框架
基本上,無人機(jī)框架是構(gòu)建無人機(jī)最重要的。它有助于在其上安裝電機(jī)、電池和其他部件。
無人機(jī)電機(jī)
有幾種類型的電機(jī)可用于制造無人機(jī)。但是由于無人機(jī)需要在空中推力才能漂浮,我們應(yīng)該使用一些強(qiáng)大的電機(jī)。無人機(jī)中使用的廉價(jià)、輕便、小巧且功能強(qiáng)大的電機(jī)是無刷直流電機(jī) (BLDC)。對于小型無人機(jī),我們不使用 BLDC 電機(jī),而是使用小型 DC 齒輪電機(jī)。
螺旋槳
當(dāng)您為無人機(jī)選擇螺旋槳時(shí),請選擇最輕但最強(qiáng)的螺旋槳。您還需要記住,螺旋槳應(yīng)在兩側(cè)保持平衡。
大多數(shù)無人機(jī)飛行失敗是由于螺旋槳故障。所以要慎重選擇。始終選擇合適尺寸的螺旋槳。按照電機(jī)手冊選擇最適合的尺寸。下圖顯示了不同類型的螺旋槳:
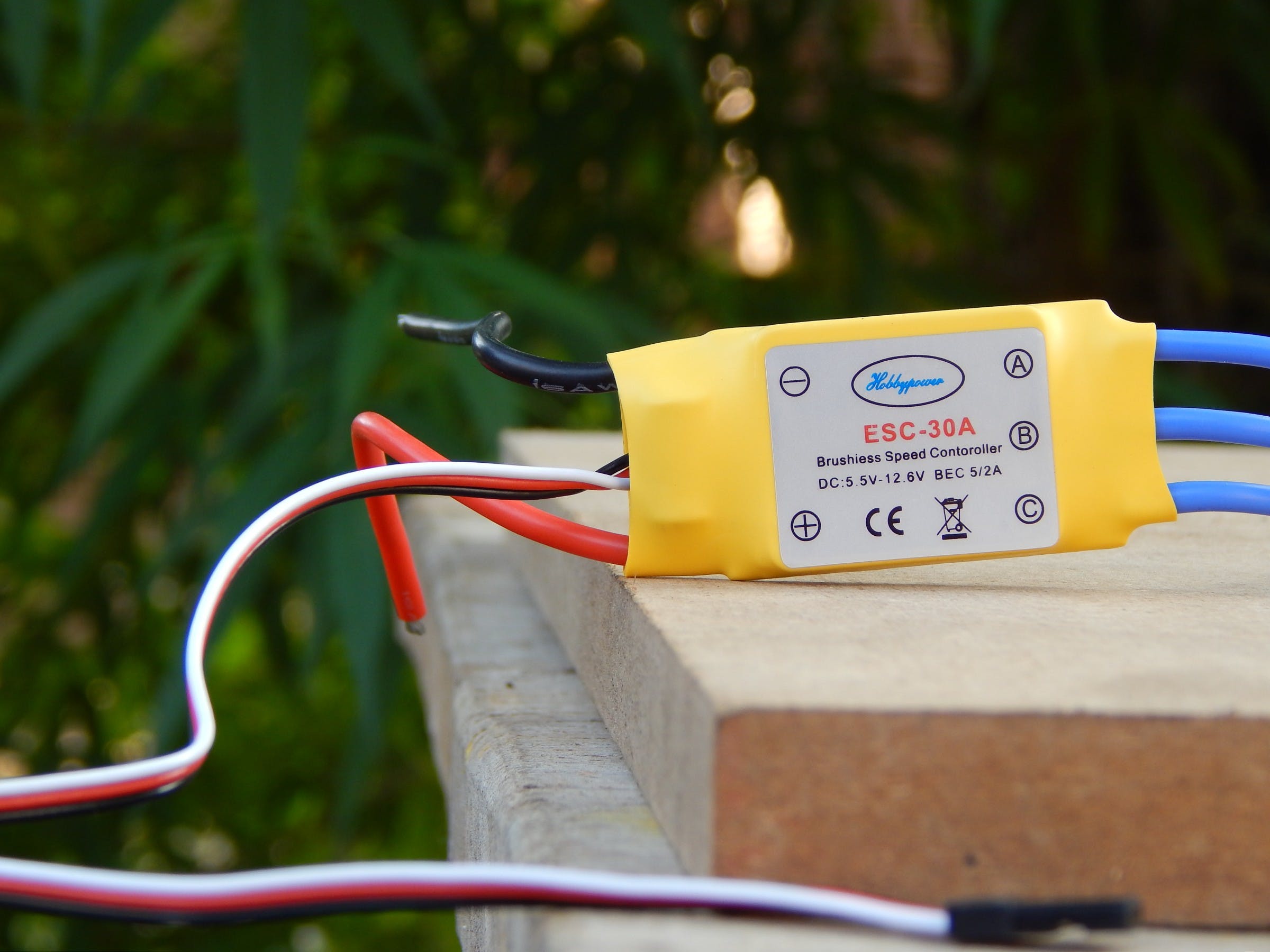
ESC鍵
除非您使用速度控制器,否則您無法控制無人機(jī)電機(jī)的速度。它們使您能夠控制電機(jī)的電壓和電流,從而控制速度,這是在空中漂浮后將無人機(jī)從一個(gè)地方移動到另一個(gè)地方的首要任務(wù)。您需要增加和減少電機(jī)的速度才能使無人機(jī)向前、向后、向左或向右移動。
一些使無人機(jī)更智能的模塊
還有其他模塊可以使無人機(jī)更加智能,例如 GPS、Wi-Fi 模塊(例如 ESP8266)、電池檢查器和增程器天線等。
有關(guān)無人機(jī)的更多信息 ( Packt.com )
第 7 步:組裝
我們將開始組裝和飛行我們的無人機(jī)。好吧,將提供完整的零件清單,以便您可以購買適當(dāng)數(shù)量的設(shè)備。所以讓我們從第 2 章開始,組裝你的無人機(jī)。
在你建造無人機(jī)之前要知道的事情,我們被介紹了無人機(jī)的所有基本組件。在本章中,我們將組裝我們的無人機(jī)并為下一階段做好準(zhǔn)備。
我們將涵蓋以下主題
組裝你的無人機(jī)在你建造無人機(jī)之前要知道的事情,我們被介紹了無人機(jī)的所有基本組件。
在本章中,我們將組裝我們的無人機(jī)并為下一階段做好準(zhǔn)備。
我們將涵蓋以下主題。
- 組裝框架
- 連接電機(jī)
- 連接電調(diào)
- 連接 ArduPilot
- 使用 ArduPilot 配置無人機(jī)
- 飛行無人機(jī)所需的空氣動力學(xué)
- 了解飛行無人機(jī)的安全協(xié)議
- 防止無人機(jī)墜毀
組裝框架
無人機(jī)框架的組裝需要很大的耐心,再次建議您在第一次進(jìn)行時(shí)遵循使用說明書
連接電機(jī)要連接電機(jī),您需要將電機(jī)放在框架臂上并安裝螺絲,如下圖所示,確保在不破壞框架臂的情況下盡可能擰緊螺絲: BLDC有三根電線從電機(jī)出來。我們需要將子彈連接器焊接到它們以連接到 ESC。現(xiàn)在,將其他三個(gè)電機(jī)連接到框架臂。
連接 ESC連接 ESC 是構(gòu)建無人機(jī)或任何其他無人機(jī)的最重要任務(wù)之一。您可以購買四片電調(diào)或四合一電調(diào)。建議你用四合一電調(diào),比較輕,好用。如果您使用單個(gè)電調(diào),請將電機(jī)的線連接到電調(diào),如下圖所示。電機(jī)和ESC的連接無關(guān)緊要,因?yàn)殡娋€僅用于改變相位:
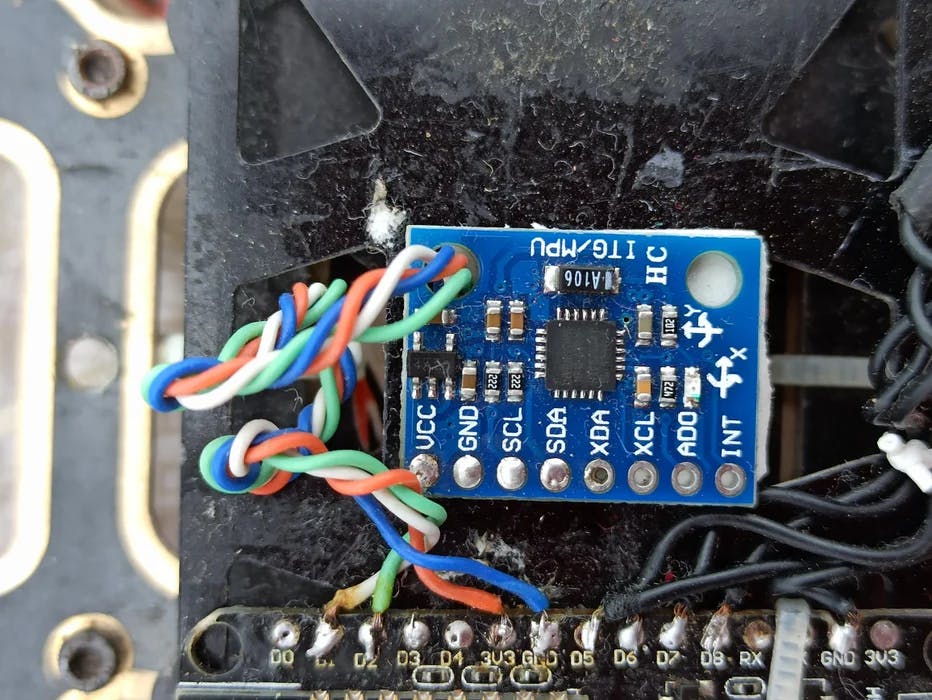
第 8 步:MPU6050
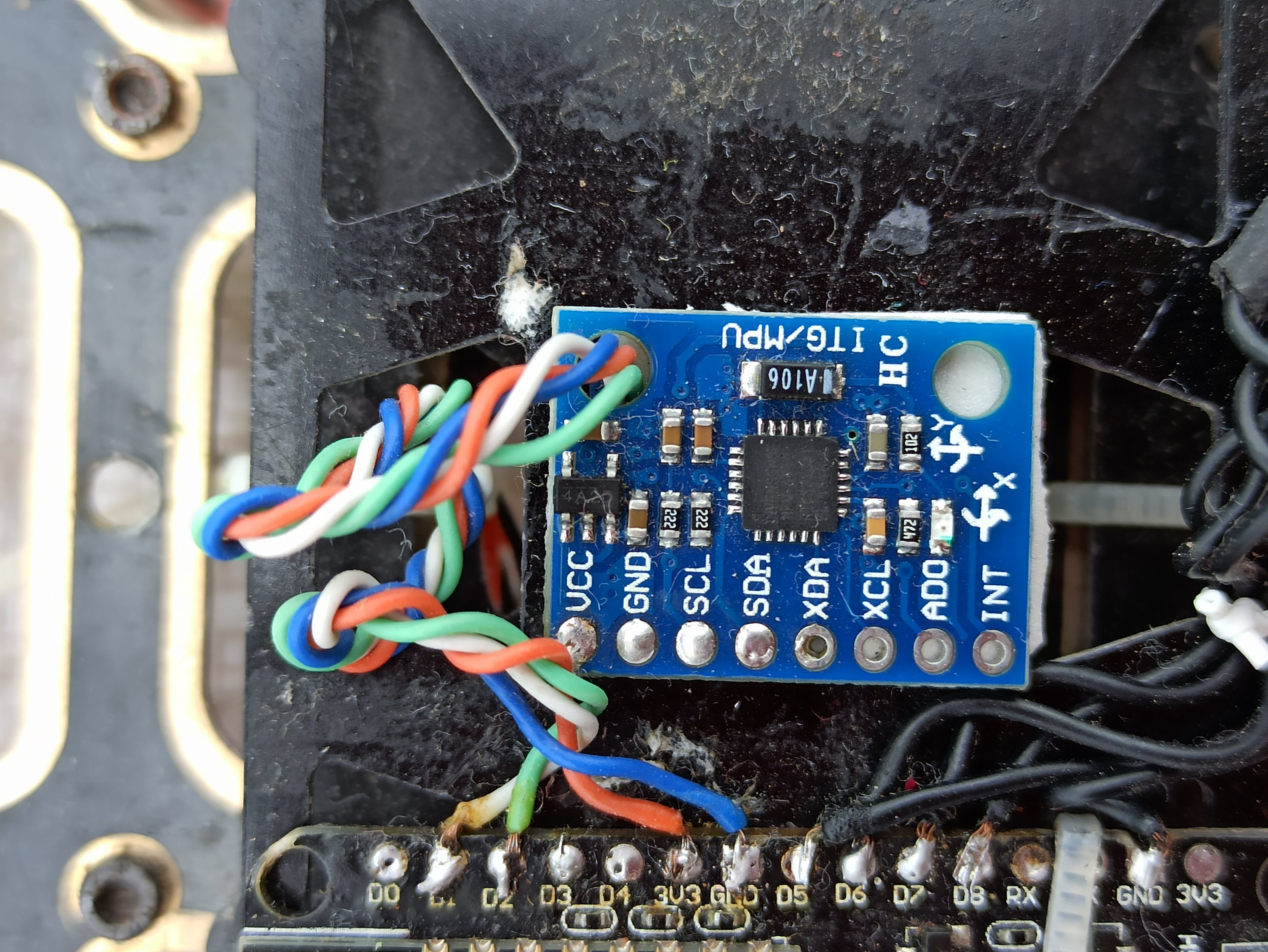
該傳感器使用 i2c 進(jìn)行通信。所以我將 SDA 和 SCL 連接到 NodeMCU 的 D1 和 D2。如數(shù)據(jù)表中所述,每個(gè)傳感器都有 3 種模式。
我將使用陀螺儀的 500 度刻度范圍和加速度計(jì)的 8g 刻度范圍。為了從中獲得角度,我必須配置這些寄存器。
arduino IDE 的 Wire 庫可以輕松完成這項(xiàng)工作。然后它從傳感器請求 14 個(gè)字節(jié)并連續(xù)讀取角度。
確保您已將整數(shù)定義為 16 位,因?yàn)閿?shù)據(jù)是 2 的補(bǔ)碼值。加速度計(jì)提供實(shí)時(shí)角度但陀螺儀提供角速度。
如果我想從陀螺儀獲得角度,那么我必須整合每個(gè)循環(huán)中的角速度。因此,我從 2 個(gè)不同的傳感器獲得了角度。
嗯,電機(jī)會產(chǎn)生很多振動,這會顯著影響加速度計(jì)。所以我使用了一個(gè)免費(fèi)的過濾器來克服這個(gè)問題。
它使用兩個(gè)傳感器數(shù)據(jù)來生成穩(wěn)定的角度。
但是陀螺儀傳感器幾乎沒有錯(cuò)誤。為了解決這個(gè)問題,我放置了無人機(jī)水平儀并讀取了 4000 次數(shù)據(jù),然后取平均值,我得到了陀螺儀錯(cuò)誤。這樣我就可以校準(zhǔn)一次,每次都使用。
然后我在每個(gè)循環(huán)中減去它。所以,現(xiàn)在我得到了完美的實(shí)時(shí)角度。
第 9 步:接線圖和代碼
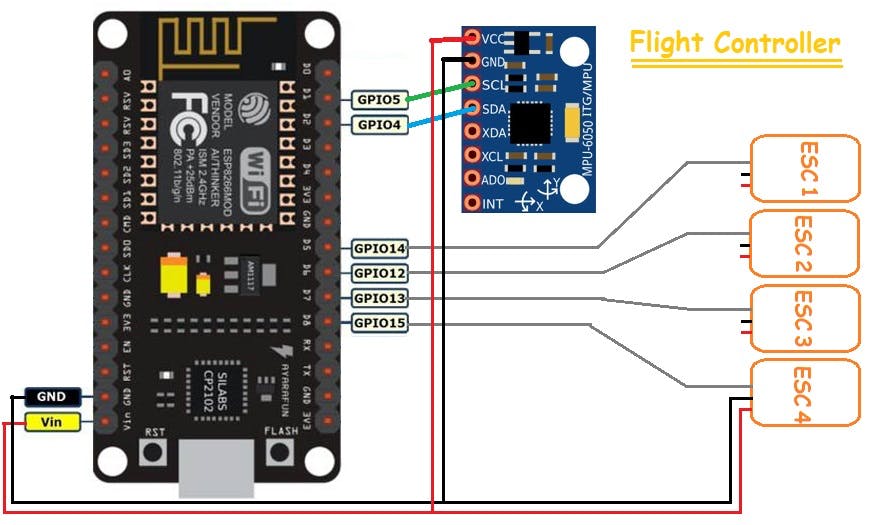
接線圖非常簡單。
您必須按照原理圖將 MPU6050 模塊引腳與 Esp8266 引腳連接起來。示意圖如上所示。
并用電腦上傳代碼
第 10 步:制作電路
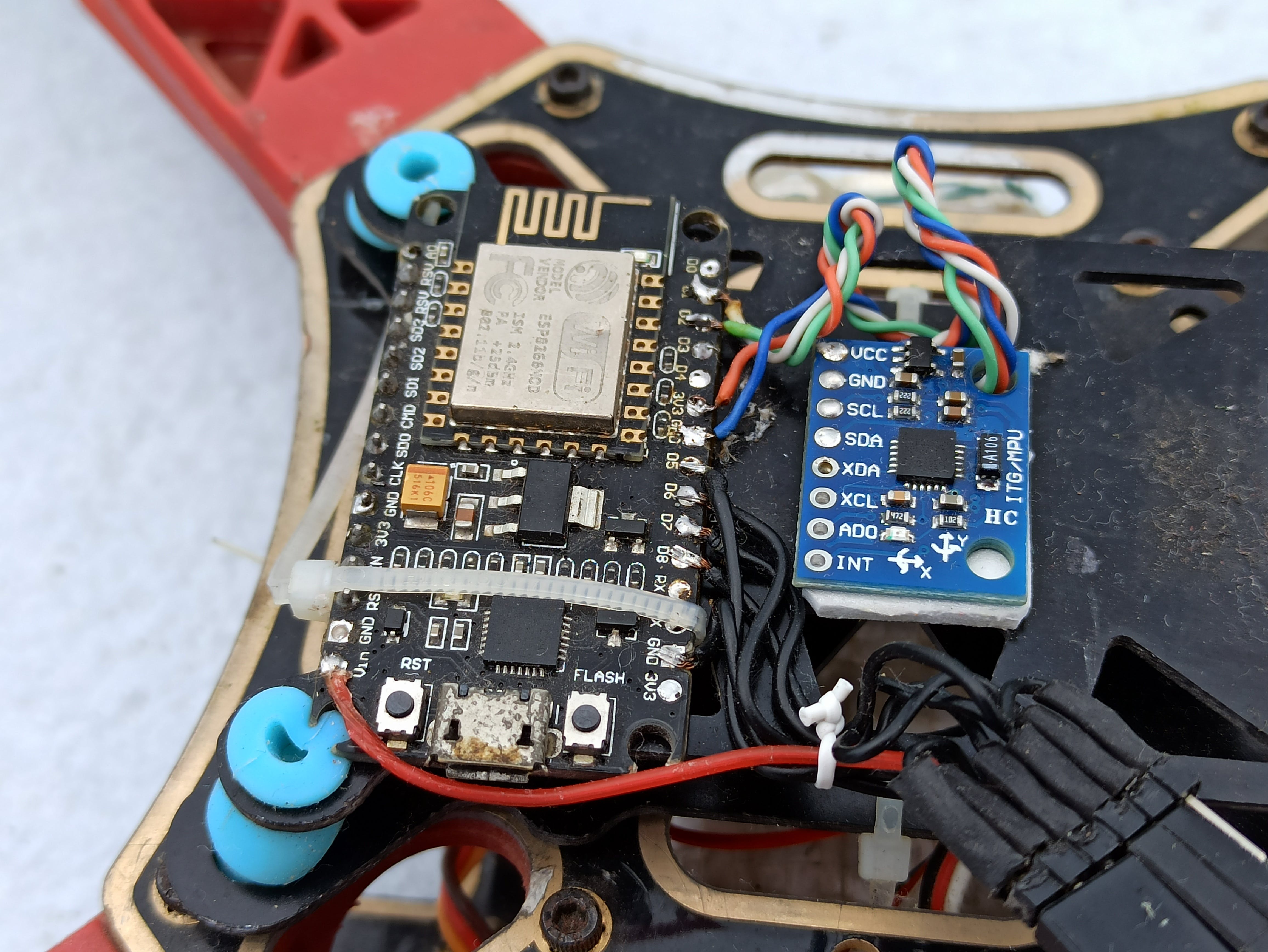
按照上圖給出的示意圖制作電路。
我已經(jīng)解釋了模塊的連接細(xì)節(jié)。
第 11 步:飛行前檢查
飛行前檢查東西
- 檢查所有連接
- 檢查發(fā)送器和接收器綁定
- 檢查電池電量和電壓
- 檢查所有螺旋槳是否連接牢固
- 檢查所有電機(jī)安裝
- 檢查所有螺絲
- 檢查無人機(jī)的平衡,看是否有一側(cè)比另一側(cè)重
- 飛行后務(wù)必拔掉電池;只在飛行前幾秒鐘裝上電池
- 檢查外面的任何障礙物
- 讓兒童遠(yuǎn)離飛行區(qū)域
- 首次油門時(shí)與無人機(jī)保持距離
- 打開自動駕駛儀并返回主頁/啟動功能(如果可用)
- 不要在不平衡的情況下駕駛無人機(jī)...
第 12 步:飛行前檢查
在天空中飛行的國家/地區(qū)政府有一些規(guī)定,特別是無人機(jī)。始終檢查安全協(xié)議。一些常見的規(guī)則如下:
- 您不能在機(jī)場 5 英里范圍內(nèi)駕駛無人機(jī)
- 您必須將無人機(jī)保持在您的視線范圍內(nèi)
- 您不得高于 400 英尺(約 0.12 公里)
- 您不能在繁忙的交通區(qū)域駕駛無人機(jī)
- 如果您將無人機(jī)用于商業(yè)目的或?qū)I(yè)用途,則必須注冊您的無人機(jī);你必須有執(zhí)照
- 在駕駛無人機(jī)之前始終了解當(dāng)?shù)匾?guī)則
第 13 步:讓您的無人機(jī)免于墜毀

你幾乎無法阻止你的無人機(jī)撞壞一些螺旋槳,甚至是機(jī)身。損壞將取決于墜機(jī)和墜落的高度。它還取決于您的無人機(jī)降落或墜毀的表面。
駕駛無人機(jī)的最佳地點(diǎn)是沒有樹木或任何電線懸掛的開闊場地。一開始不要用大油門抬起無人機(jī),逐漸加大油門。稍后我們將了解安全節(jié)流。現(xiàn)在,您可以先使用穩(wěn)定模式。請記住,油門只不過是加快無人機(jī)螺旋槳的速度。如果您是初學(xué)者,我的建議是學(xué)習(xí)如何將無人機(jī)懸浮在地面上。一旦您...
第 14 步:飛行:
那么,讓我們看看它是如何飛行的。
這是一個(gè)非常簡單的飛行控制器。我將在即將發(fā)布的視頻中升級它。喜歡 - 添加 GPS。指南針、自動駕駛儀、alt 保持等等。而談到這個(gè)...
我使用的是 WiFi 而不是發(fā)射器,所以,是的,它可以提供無限的范圍。別擔(dān)心,我會制作一個(gè)關(guān)于 Tx 通信的專用視頻。
感謝您的支持,我們很快就會在下一個(gè)視頻中見到您,然后再見。
?
- 構(gòu)建基于ESP8266的物聯(lián)網(wǎng)控制器
- 使用ESP32的無人機(jī)飛行控制器 5次下載
- ESP8266單股RGB LED控制器板
- esp8266 12f無人機(jī)開源分享
- 使用ESP8266-01制作WIFI遙控小車(一)
- 個(gè)性化制作nodemcu-firmware(esp8266 硬件制作)----程序bin的制作
- ESP8266 控制開關(guān)
- 中移合物固件ESP8266軟件下載 8次下載
- 一種小型復(fù)合式無人機(jī)飛行控制布局方案 23次下載
- 無人機(jī)的飛行原理的簡介和設(shè)計(jì)資料說明 15次下載
- 無人機(jī)和無人機(jī)控制方法及無人機(jī)遠(yuǎn)程操控系統(tǒng)方法說明 69次下載
- 機(jī)智云ESP8266模組固件資料下載 65次下載
- 無人機(jī)環(huán)繞目標(biāo)飛行控制 2次下載
- 基于STM32微控制器的小型無人機(jī)飛行控制系統(tǒng) 37次下載
- 基于ARM的無人機(jī)飛行控制系統(tǒng)的實(shí)現(xiàn)
- ESP8266紅外信號收發(fā)實(shí)驗(yàn) 1678次閱讀
- ESP8266硬件 4143次閱讀
- 無人機(jī)實(shí)現(xiàn)穩(wěn)定飛行需要用到哪些傳感器呢 2027次閱讀
- ESP8266/ESP32自動下載原理 4249次閱讀
- 基于ESP8266微控制器的WiFi百葉窗開啟器 1842次閱讀
- 如何使用ESP8266制作可配置的Web服務(wù)器 1.2w次閱讀
- 如何利用ESP8266制作一個(gè)簡單的四軸飛行器 4532次閱讀
- 如何使用ESP8266開發(fā)板制作光強(qiáng)度檢測器 3907次閱讀
- 無人機(jī)飛行感知技術(shù)有什么用途 2026次閱讀
- 淺析基于FPGA的無人機(jī)控制器設(shè)計(jì)方案解析 6749次閱讀
- esp8266中文資料匯總(esp8266引腳圖_與單片機(jī)連接_串口wifi實(shí)例) 22.4w次閱讀
- 怎樣使無人機(jī)安全飛行?無人機(jī)飛行需要掌握什么安全知識 1.5w次閱讀
- 遠(yuǎn)程控制通訊--基于Arduino + ESP8266控制LED燈 3.9w次閱讀
- esp8266 at指令集詳解 14.1w次閱讀
- esp8266串口wifi實(shí)例 1.8w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論