 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
更新:好消息!現在有一個新版本的 EdiBot:EdiBot 2.0 。
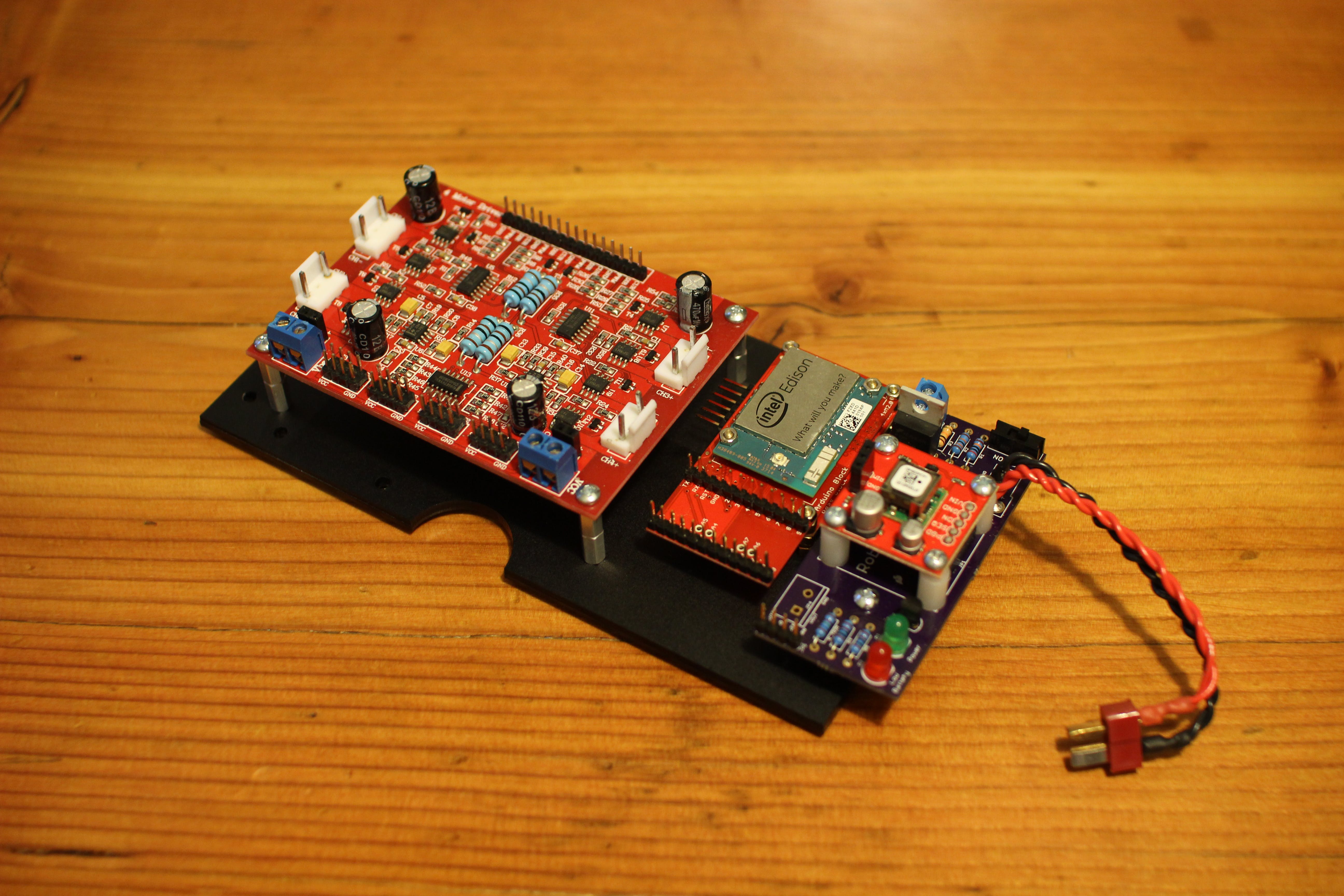
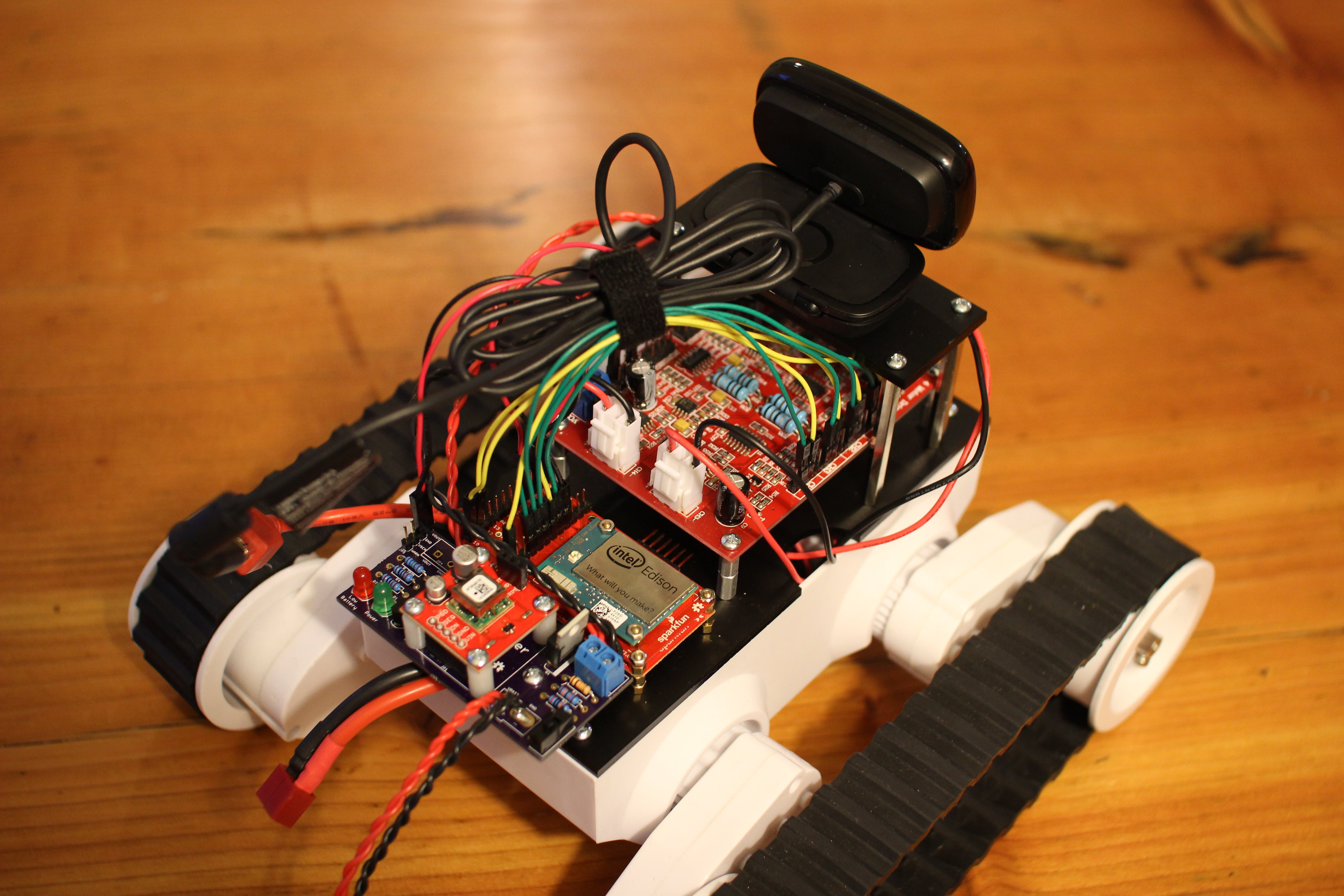
EdiBot 是一款用于演示英特爾 Edison 和 SparkFun 模塊的機器人。它依靠 Arduino Block 來控制電機,而 Edison 處理視覺處理任務。機器人找到任何紅色物體并朝最大的那個行駛。如果紅色物體在視野中??太大,機器人會后退。
第 1 步:訂購和構建電源板
您將需要一塊可以將電池直接供電給 Rover 5 板(為電機供電)并將電壓降到 4.2 V 為 Edison 和 Arduino 供電的板。我在 OSH Park 上創建了一個委員會來做到這一點:
https://oshpark.com/shared_projects/YDhDBhlM
您可以訂購或創建自己的。原理圖和布局 (Eagle) 可以在EdiBot 的 GitHub 存儲庫中找到。
注意:VSEN 信號不起作用!這個想法是讓 Arduino 感應 TL431 的 REF 引腳上的電壓,并在電壓達到一定水平時打開低電量 LED。但是,在沒有電源的情況下,ADC 引腳會將 REF 處的電壓拉到阻止 MOSFET 開啟的水平,這意味著您沒有獲得電源!如果我將來對電源板進行修訂,這將得到解決。
您將需要使用以下組件構建電路板:
- R1:200k
- R2:130k
- R_TRIM:1.65k?
您還需要通過一些電線將 Deans 連接器連接到電源板上的 VBATT 和 GND。這將允許機器人由鋰聚合物電池供電。
第 2 步:準備 Arduino 模塊
將一個 6 針直角接頭焊接到 Arduino 模塊側面的 FTDI 端口中。使用3.3V FTDI 分線器,使用 StandardFirmata 使用此處的說明對 Arduino 塊進行編程:
第 3 步:構建塊堆棧
使用 Edison 硬件包(例如 M2 螺釘、螺母和支架),將 Edison 連接到 Arduino 塊,然后連接到基塊。堆棧應該是:
- 愛迪生
- Arduino塊
- 基塊
注意:不要在 Arduino Block 上的 TX 引腳的安裝孔上添加支架或螺母,否則您可能會將 RX 過孔短路到地并阻止 UART 通信。
第4步:制作盤子
您需要一些東西來將所有硬件安裝到 Rover 5 底盤上。您可以在任何材料上鉆孔,但如果您可以使用激光切割機,則可以更輕松地對齊安裝孔。
下載以下矢量藝術文件(或 PDF)并在激光切割機上切割形狀。
第 5 步:連接硬件
將 Rover 5 板、Edison Block 堆棧和機器人電源板安裝到底板上。請注意,Rover 5 Board 使用其包裝中的支架,Edison 堆棧使用“Edison Hardware Pack”中的 2 個支架,而電源板使用 #4-40 3/8 英寸塑料支架。
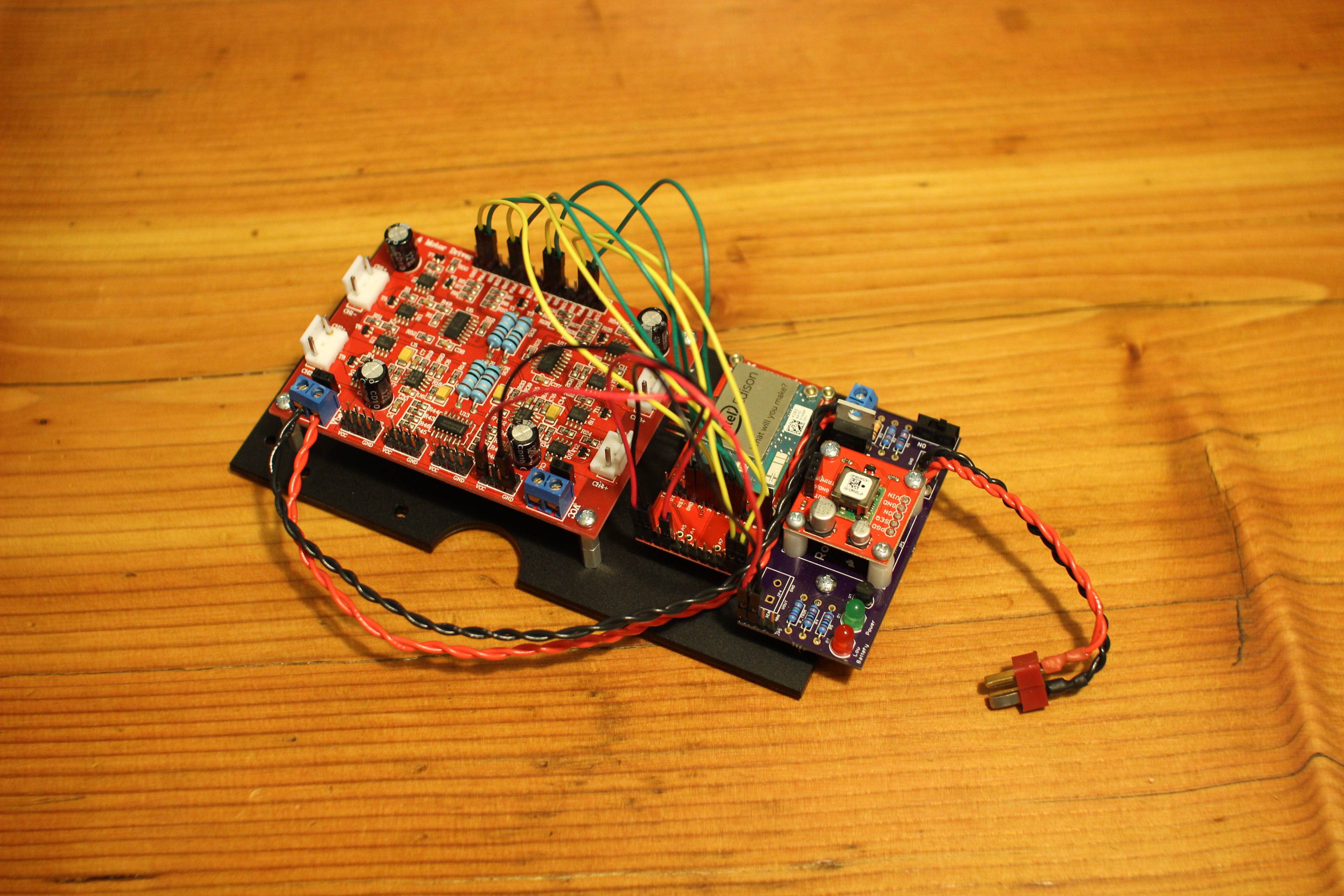
第 6 步:連接電線
將電源線從電源板上的 Vbatt 和 GND(螺絲端子)連接到 Rover 5 板的 Vbat 和 GND(螺絲端子)。我為每個連接使用了 2 根 22 AWG 絞合線,因為單個電機失速可以消耗幾安培的電流。
使用 F/F 跳線,將以下從機器人電源板連接到 Arduino 模塊:
- VOUT → VIN
- 地線→地線?
因為 VSEN 引腳不起作用,所以不要將任何東西連接到它或 WARN 引腳。為了將來參考,VSEN 應該轉到 A0(Arduino 塊),WARN 應該轉到引腳 8(Arduino 引腳)。
再次使用 F/F 跳線,將以下從 Arduino Block 連接到 Rover 5 板:
- 3V3 → VCC(任意)
- GND → GND(任意)
- 3 → CH1:PWM
- 2 → CH1:目錄
- 9 → CH2:PWM
- 4 → CH2:目錄
- 11 → CH3:PWM
- 6 → CH3:目錄
- 10 → CH4:PWM
- 5 → CH4:目錄
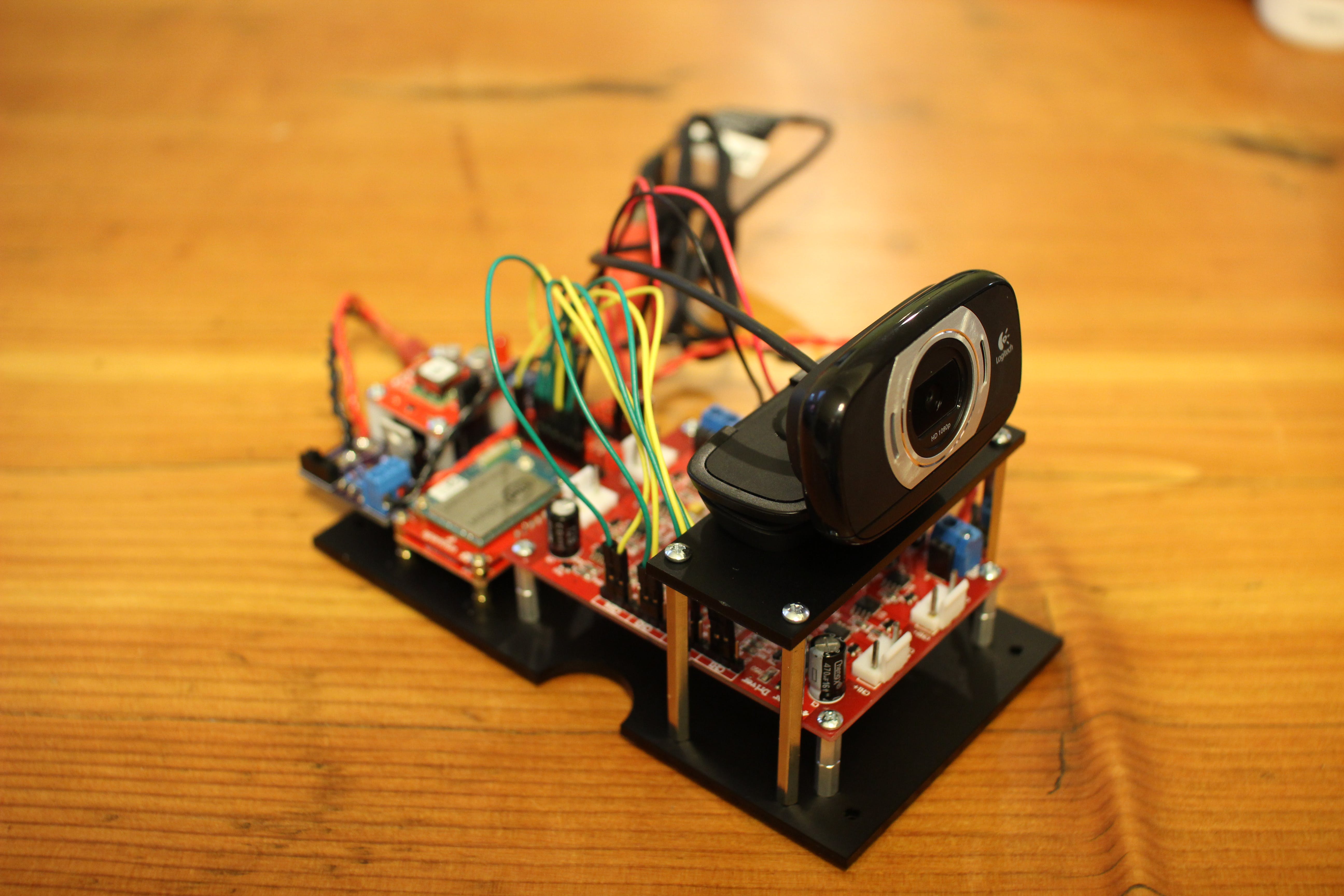
第 7 步:連接網絡攝像頭
用 1/4 英寸螺釘將網絡攝像頭連接到板上。
在 Rover 5 Board 的側面添加 4 個支架,然后連接網絡攝像頭板。使用 Rover 5 Board 隨附的長支架。
通過 USB micro-A 適配器將網絡攝像頭連接到 Edison 的 OTG 端口。
第 8 步:將硬件安裝到 Rover
將 LiPo 電池(或 Rover 5 隨附的電池組)放入 Rover 5 機箱中。
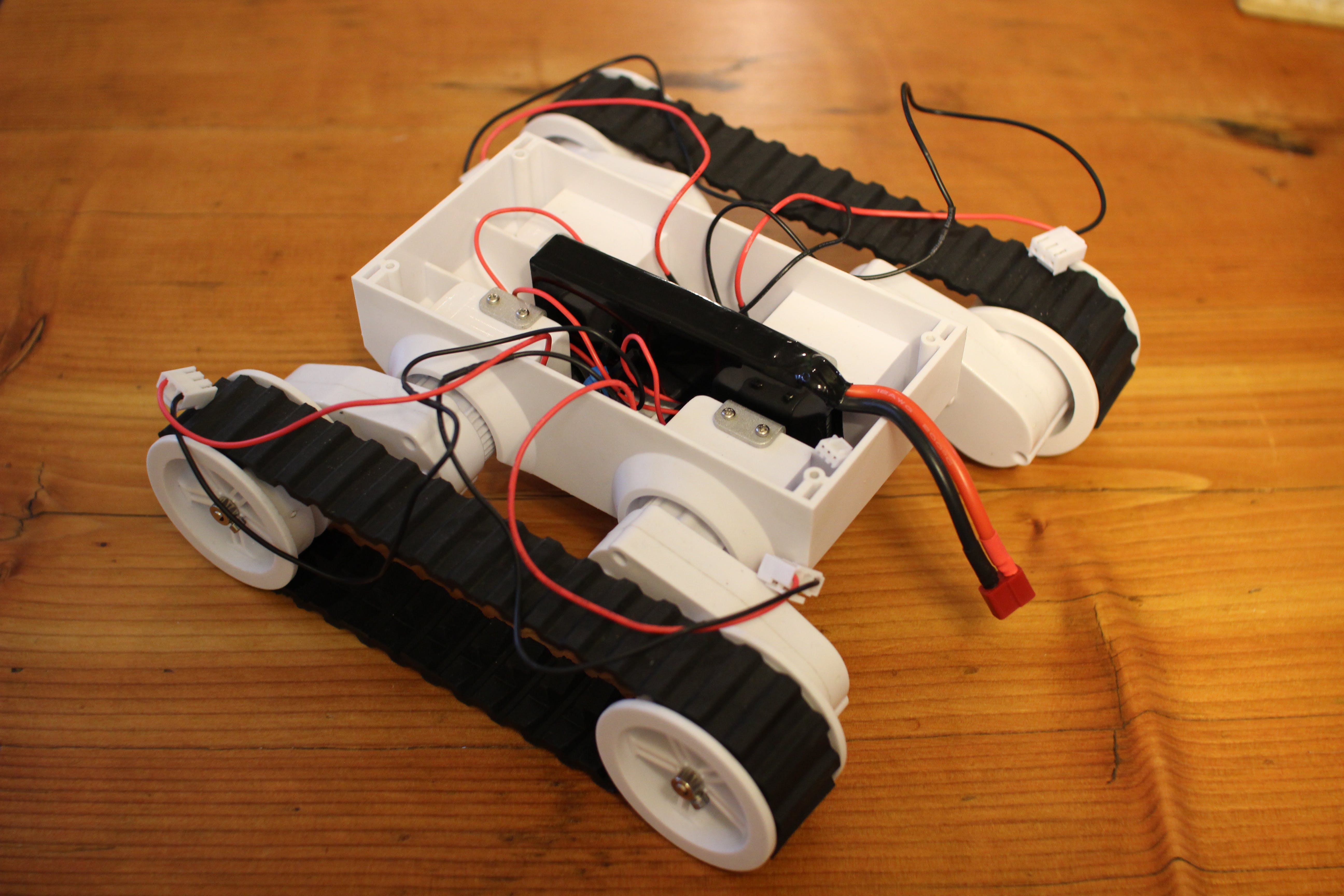
使用一些 #4-40 螺釘將硬件安裝到機箱上。您可能需要卸下電源板才能找到背面的螺絲孔。
將電機電纜穿過板兩側的半圓形開口。將電機連接到 Rover 5 板上的以下部件:
- 右前電機→CH1
- 左前電機 → CH2
- 右后電機 → CH3
- 左后電機 → CH4
將電池電纜穿過板背面的半圓形開口。
第 9 步:安裝 Ubilinux
按照以下鏈接中的說明在您的 Edison 上安裝 Ubilinux。安裝后不要忘記等待至少 2 分鐘!
第 10 步:安裝庫
通過串行控制臺或 SSH 使用憑據登錄 Edison:
用戶名:愛迪生
密碼:愛迪生
獲得超級用戶權限:
蘇
密碼:愛迪生
按照 Ubilinux 教程中的說明啟用 WiFi:
更新apt-get:
apt-get 更新
安裝必備庫:
apt-get install libopencv-* apt-get install python-opencv apt-get install python-pygame apt-get install python-scipy apt-get install python-serial apt-get install python-setuptools apt-get install python-pip
安裝 Python 模塊:
點安裝 svgwrite
git clone https://github.com/sightmachine/simplecv cd simplecv python? setup.py ?install cd ..
清理包以釋放一些空間:
apt-get 自動清理 apt-get clean apt-get 自動刪除
第 11 步:運行 EdiBot 代碼
下載存儲庫:
git clone https://github.com/ShawnHymel/EdiBot cd EdiBot
運行 Python 程序:
python Ball_Chase.py
您需要將電池插入電源板并將開關打開。這為電機提供動力。
第 12 步:玩你的機器人
將任何紅色物體舉到機器人的網絡攝像頭上。機器人將嘗試追逐物體!
獎勵:讓代碼在啟動時運行
如果您希望 Ball_Chase.py 程序在啟動時運行,我們需要在運行腳本之前將 uvcvideo 模塊列入黑名單并加載它(否則,網絡攝像頭無法正常運行):
納米 /etc/modprobe.d/fbdev-blacklist.conf
在文件底部添加以下行:
黑名單uvcvideo
修改 rc.local 以加載 uvcvideo 模塊并在啟動時運行 Ball Chase 程序。打開 rc.local 文件:
納米 /etc/rc.local
在“exit 0”行之前添加以下行:
/sbin/modprobe uvcvideo python? /home/edison/EdiBot/Ball_Chase.py ?&
'&' 允許腳本在后臺運行。重新啟動愛迪生,讓它去追逐紅色的東西!
注意:您將需要執行硬重啟(移除電源并重新打開)。否則,將不會加載網絡攝像頭 USB 驅動程序。此外,Linux 啟動可能需要一段時間。為 EdiBot 供電后,等待大約 30 秒,讓網絡攝像頭指示燈亮起。
- 英特爾Edison教程:UPM、MRAA
- 英特爾Edison Node JS物聯網報警系統
- 使用英特爾Edison和thethings.IO的自動窗簾
- 英特爾Edison閾值WiFi Grapher
- 使用AWS和英特爾Edison構建連接的馬拉卡
- SparkFun Inventor套件Intel Edison上的智能網關
- 用于sparkfun板的開發和使用 0次下載
- 英特爾64和IA-32體系結構軟件開發人員手冊 5次下載
- LTC3816演示電路-用于英特爾IMVP-6IMVP-6.5 CPU(12V至0.9V@25A)的DCDC控制器
- 2021年英特爾處理器排行榜文件下載 61次下載
- 基于Matlab的機構與機器人分析資料下載 11次下載
- 基于DSP和PC的農業機器人控制系統 17次下載
- 基于DSP芯片的足球機器人實現與設計 26次下載
- 英特爾的新硬件套裝方便機器人行業 0次下載
- 用于OpenCL的英特爾FPGA SDK資料 8次下載
- 英特爾CPU部署Qwen 1.8B模型的過程 2318次閱讀
- 英特爾、三星和臺積電公布下一代晶體管進展 443次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 醫用機器人的功能_醫用機器人分類 2227次閱讀
- 英特爾電腦棒拆解 1.2w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 英特爾為什么要找三星代工生產芯片 7946次閱讀
- 仙知機器人自主研發用于移動機器人應用專業級客戶端軟件Roboshop 6069次閱讀
- 英特爾的全新芯片架構和六大技術新動向戰略說明 4782次閱讀
- 英特爾、蘋果、高通、AMD的CPU有什么重大Bug嗎? 5591次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人需要怎樣的計算平臺?最強大腦當屬CPU+FPGA? 3219次閱讀
- 英特爾對自動駕駛所做的準備工作 2421次閱讀
- 英特爾Edison計算平臺詳解 3824次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論