 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
背景
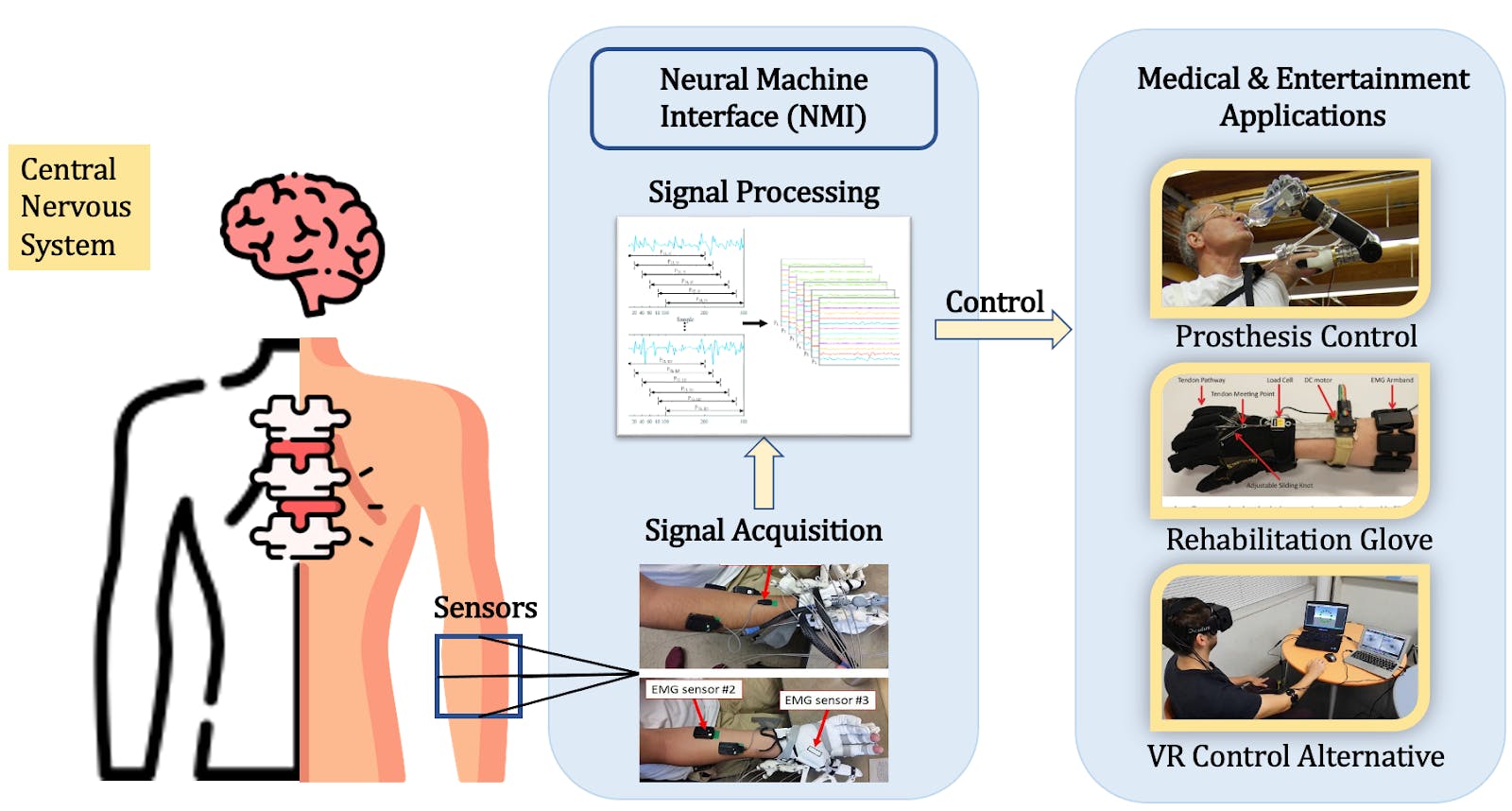
在過去十年中,由于仿生假肢在改善中風(fēng)后患者和截肢者生活質(zhì)量方面的重要應(yīng)用,其研究和開發(fā)取得了顯著增長。根據(jù) Grand View 研究數(shù)據(jù)庫 [1],2020 年全球假肢和矯形器市場規(guī)模為 61.1 億美元,預(yù)計(jì) 2021 年至 2028 年將以 4.2% 的復(fù)合年增長率增長。截肢,殘余肌肉和假肢之間的控制接口(即神經(jīng)機(jī)器接口)對于仿生假肢的自然運(yùn)動至關(guān)重要。如圖 1 所示,基于肌電圖 (EMG) 的控制界面已廣泛應(yīng)用于醫(yī)學(xué)以及一些娛樂應(yīng)用,如假肢控制、康復(fù)手套、或者為VR游戲提供另一種交互方式。基于 EMG 的神經(jīng)機(jī)器接口可以測量電活動以響應(yīng)神經(jīng)對肌肉的刺激,以識別人體運(yùn)動意圖并將記錄的 EMG 信號轉(zhuǎn)換為有效的控制信號以驅(qū)動外部假肢。最近,由于從許多用戶那里收集的大量 EMG 數(shù)據(jù)以及學(xué)習(xí)算法和計(jì)算設(shè)備的進(jìn)步,深度學(xué)習(xí)在進(jìn)一步提高基于 EMG 的控制界面設(shè)計(jì)的準(zhǔn)確性和魯棒性方面顯示出巨大的潛力。然而,深度學(xué)習(xí)方法臨床部署的一個關(guān)鍵挑戰(zhàn)和障礙是它們的高計(jì)算成本,因?yàn)榇蠖?a href='http://www.1cnz.cn/v/tag/949/' target='_blank' class='arckwlink_none'>數(shù)控制組件都是使用具有有限功率和計(jì)算能力的便攜式嵌入式系統(tǒng)構(gòu)建的。在這個項(xiàng)目中,
方法
該項(xiàng)目旨在在 Sony Spresense 微控制器上部署一個深度神經(jīng)網(wǎng)絡(luò),用于實(shí)時仿生手臂控制。我們使用 2D 卷積神經(jīng)網(wǎng)絡(luò) (CNN) 作為 EMG 模式識別算法,該算法在部署到 Sony Spresense 之前已經(jīng)過微調(diào)和壓縮。我們的 EMG 數(shù)據(jù)收集基于 Myo Armband 和 ESP32 Board。這個項(xiàng)目有4個主要部分:
- EMG 信號采集和預(yù)處理
- 離線 CNN 模型訓(xùn)練和微調(diào)
- 設(shè)備端 CNN 模型部署和推理
- 實(shí)時仿生手臂控制
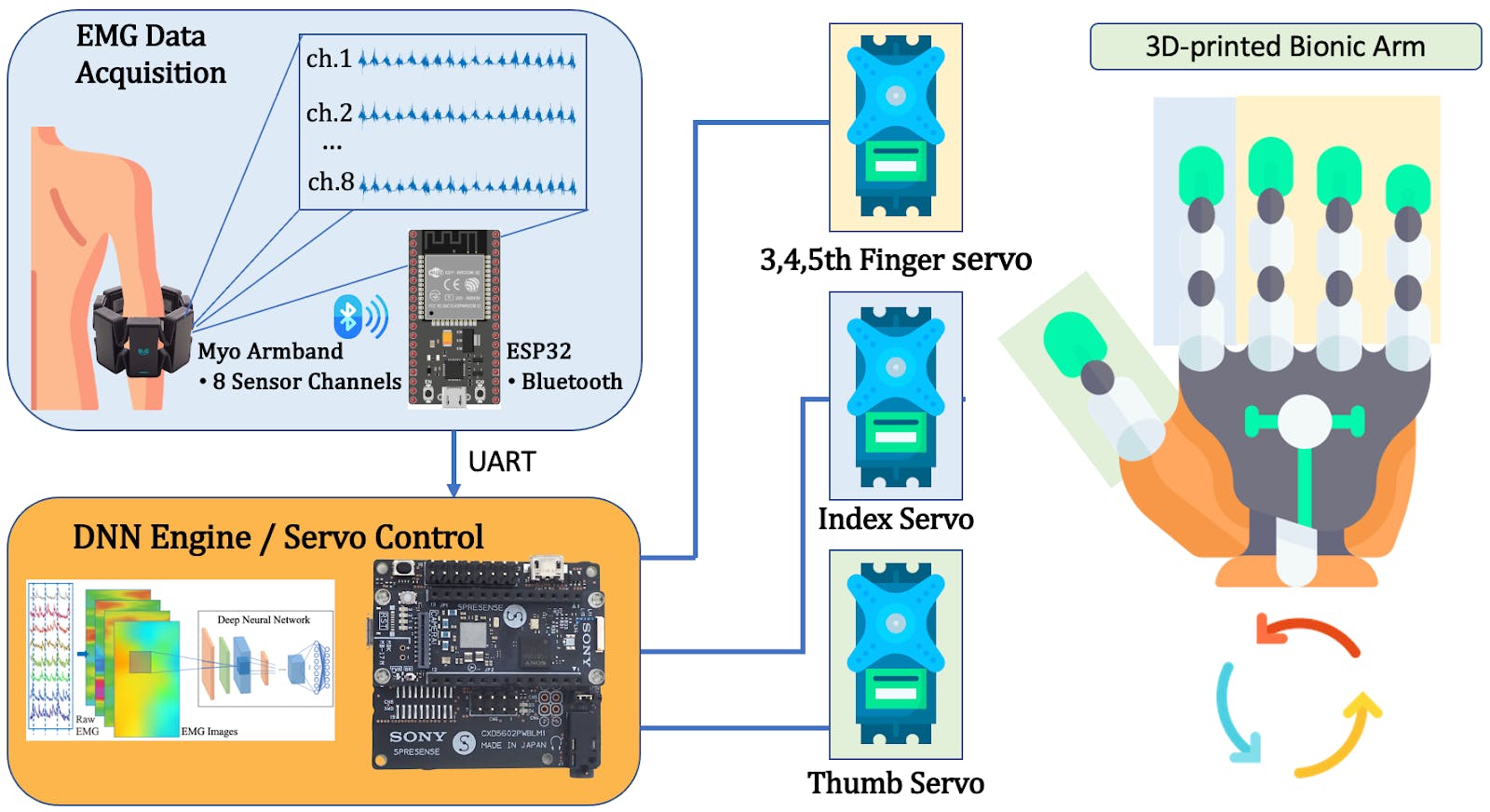
系統(tǒng)概述:圖 2 顯示了系統(tǒng)概述。我們首先通過藍(lán)牙將 Myo Armband 與 ESP32 連接起來。其次,Myo Armband 可以獲取 EMG 數(shù)據(jù),同時 ESP32 通過 UART 串??行通信向 Sony Spresense 傳輸信號。第三,Sony Spresense 對傳輸?shù)?EMG 數(shù)據(jù)進(jìn)行預(yù)處理,并實(shí)時進(jìn)行手勢預(yù)測。最后,預(yù)測的手勢被轉(zhuǎn)換為 PWM 信號以控制仿生手臂,其中 3 個伺服系統(tǒng)控制不同的手指。
在接下來的會議中,我們將詳細(xì)分析每個部分。
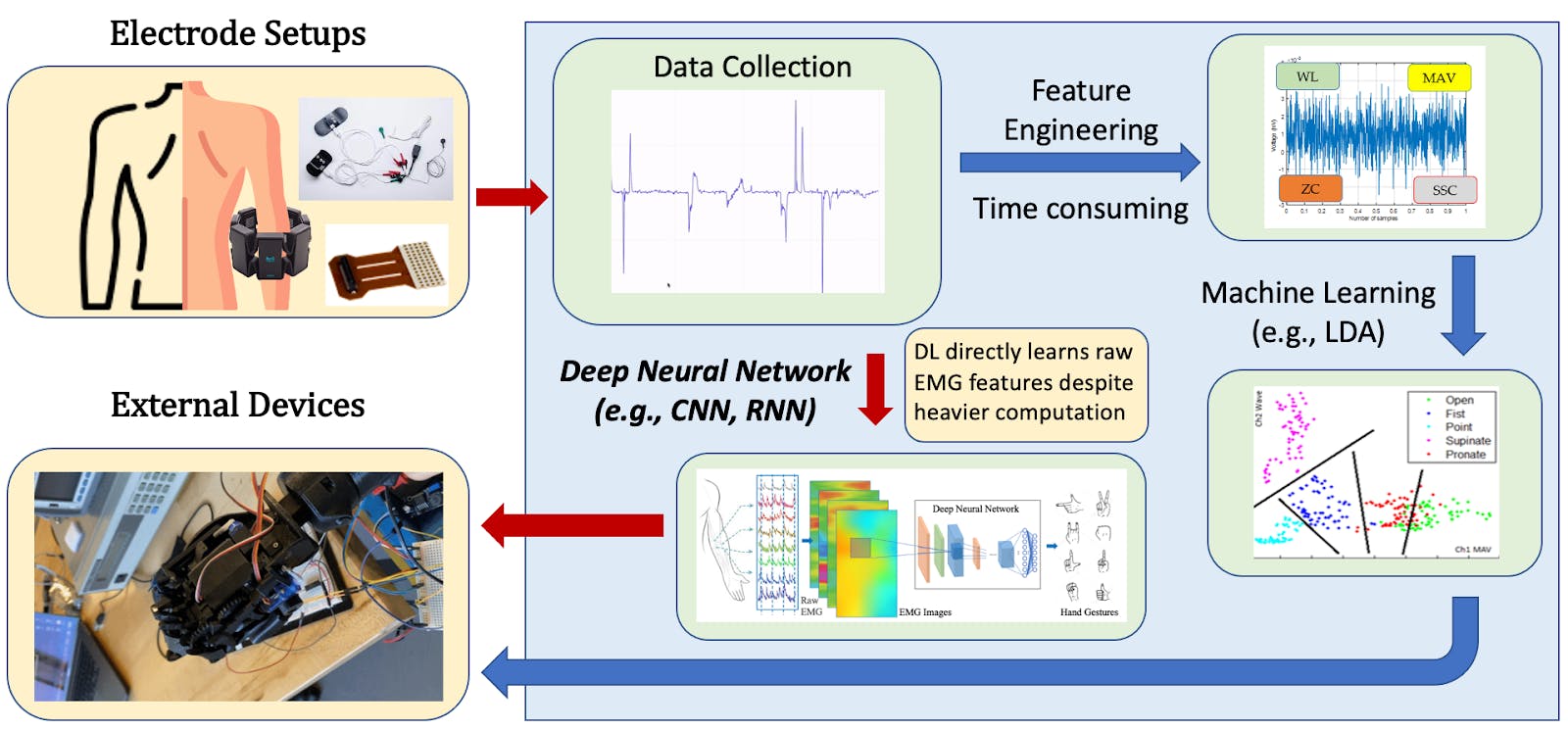
EMG模式識別: EMG信號是人體皮膚表面肌肉收縮過程中產(chǎn)生的電信號的記錄。EMG 信號模式識別是非侵入式神經(jīng)機(jī)接口應(yīng)用的技術(shù)核心。如圖 3 所示,8 個傳感器 Myo Armband 將用于收集人體皮膚的 EMG 信號。然后,收集的信號可以輸入深度學(xué)習(xí)(例如,CNN)或機(jī)器學(xué)習(xí)(例如,LDA、SVM)模型以執(zhí)行模式識別,返回不同手勢的輸出概率。與需要特征工程的傳統(tǒng)機(jī)器學(xué)習(xí)相比,深度學(xué)習(xí)在特征提取方面表現(xiàn)出色,例如從 EMG 信號中獲取平均絕對值 (MAV) 或過零 (ZC)。
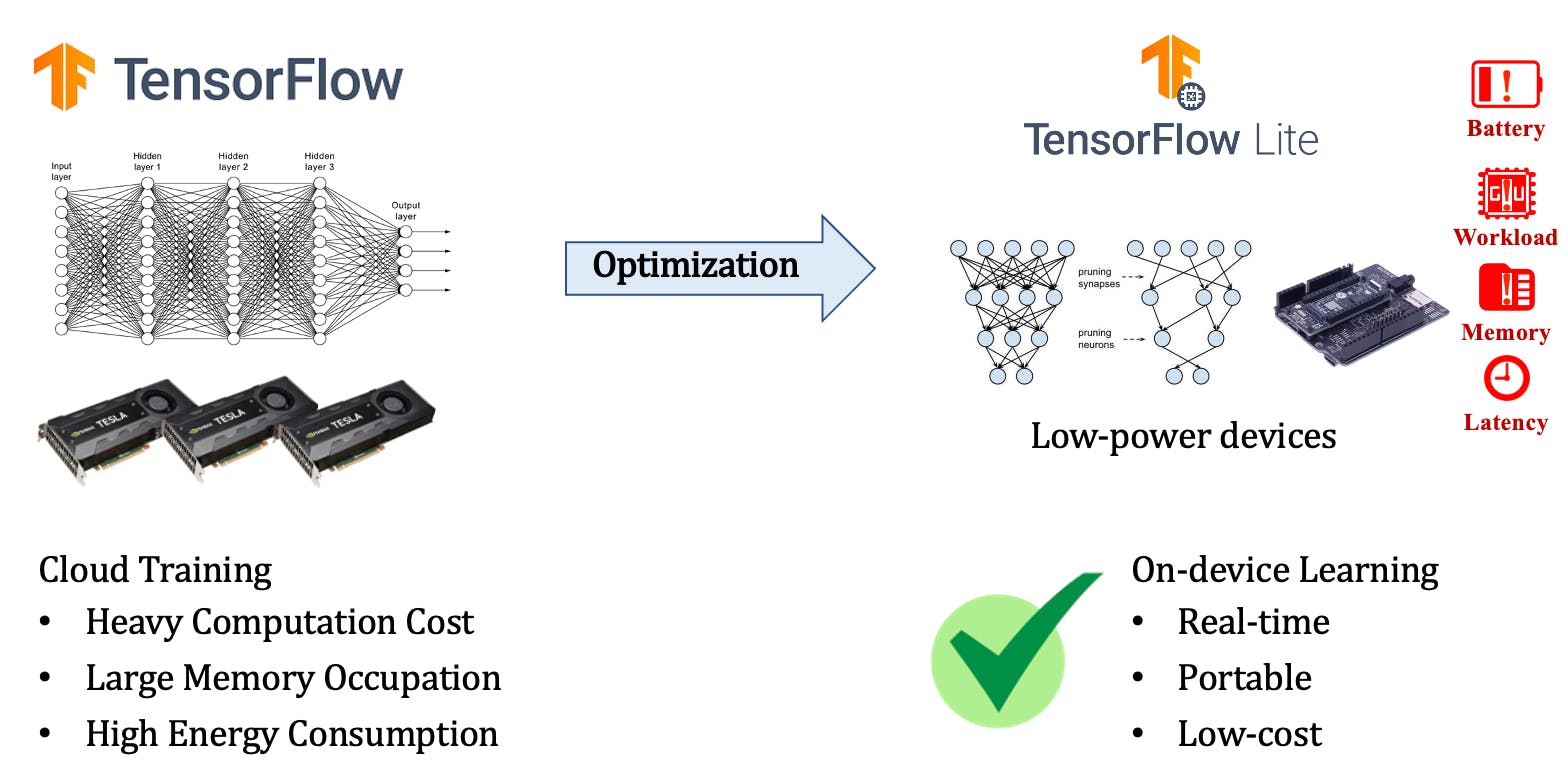
在這個項(xiàng)目中,我們利用 CNN 模型直接學(xué)習(xí)原始 EMG 特征,而無需任何額外的特征工程。但是,深度學(xué)習(xí)模型可能會比機(jī)器學(xué)習(xí)模型引入額外的計(jì)算開銷。如圖 3 所示,CNN 模型通常由高性能 GPU 進(jìn)行預(yù)訓(xùn)練,計(jì)算成本高、內(nèi)存占用大、能耗高。將它們部署到計(jì)算資源有限的低功耗設(shè)備上非常具有挑戰(zhàn)性。為了在 Sony Spresense 上實(shí)現(xiàn)實(shí)時接口,我們將利用 TensorFlow Lite 來加速 CNN 模型。
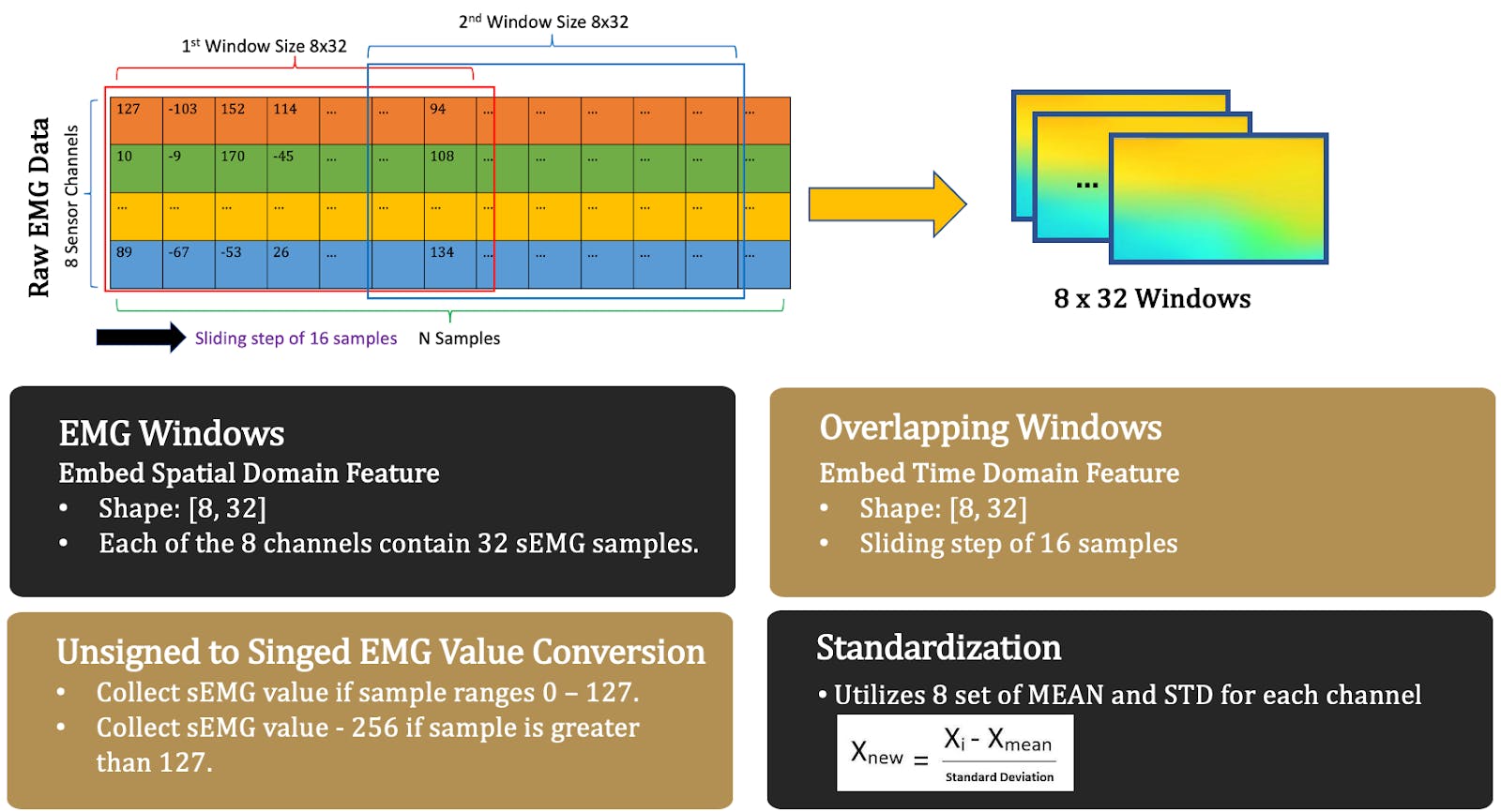
EMG 數(shù)據(jù)預(yù)處理:如圖 5 所示,Myo Armband 包括 8 個傳感器/通道,因此每個 EMG 陣列為 1x8(每個通道一個 EMG 樣本)。為了從原始 EMG 信號中提取空間域特征,我們結(jié)合了 32 個 EMG 樣本來創(chuàng)建一個 EMG 窗口(8×32)。在 EMG 信號收集過程中,我們以 16 步長重疊 EMG 窗口,以便下一個 EMG 窗口包含來自先前 EMG 窗口的最后 16 個樣本,以便進(jìn)一步結(jié)合時域特征。此外,原始 EMG 值是一個 0 - 255 范圍內(nèi)的 8 位無符號數(shù),因此如果 EMG 值大于 127,我們通過將值減去 256 將 EMG 值從無符號數(shù)更改為有符號數(shù)。最后,我們將有一個給定從 NinaPro DB5 數(shù)據(jù)集獲得的 7 個手勢,從 EMG 樣本計(jì)算的 8 個通道中的每個通道的一組平均值和標(biāo)準(zhǔn)偏差。
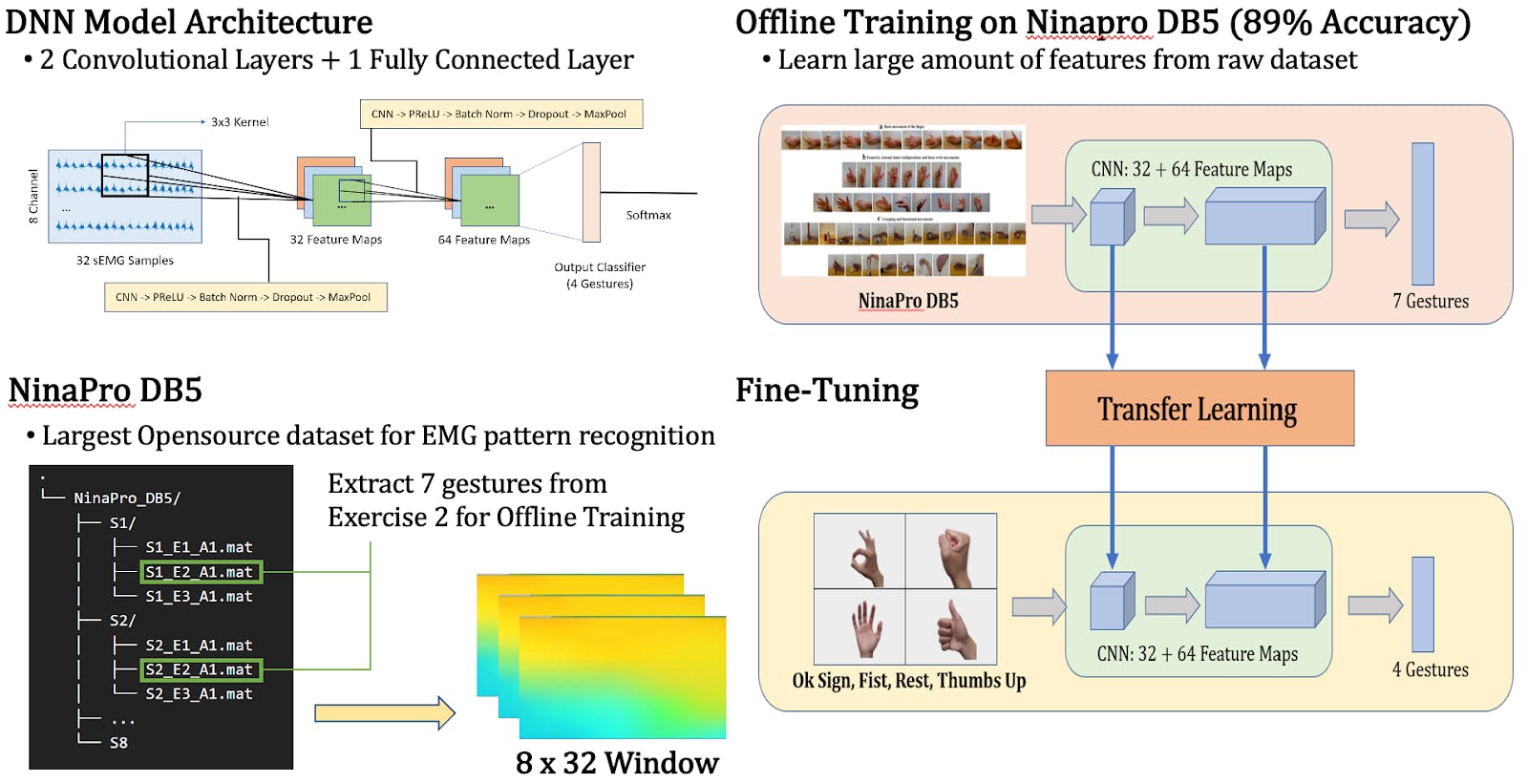
深度神經(jīng)網(wǎng)絡(luò)模型與訓(xùn)練:如圖 6 所示,我們的 CNN 模型由 2 個卷積層和一個全連接層組成。第一個卷積層由 32 個濾波器組成,然后是 PReLU 激活函數(shù)、用于加速模型訓(xùn)練的批量歸一化、用于對抗過度擬合的空間 2D dropout 和最大池化。第二個卷積層與第一層相同,只是它使用 64 個過濾器而不是 32 個。最后,我們將以 N 個神經(jīng)元全連接層結(jié)束,這取決于 N 個手勢進(jìn)行預(yù)測。在我們的項(xiàng)目中,我們利用來自名為 NinaPro DB5 [3] 的大型開源 EMG 數(shù)據(jù)集的 7 個手勢來訓(xùn)練我們的模型。然后,我們使用從 Myo 臂章收集的實(shí)時 EMG 信號對其進(jìn)行微調(diào),將模型學(xué)習(xí)從較大的數(shù)據(jù)集推廣到更具體的下游數(shù)據(jù)集。
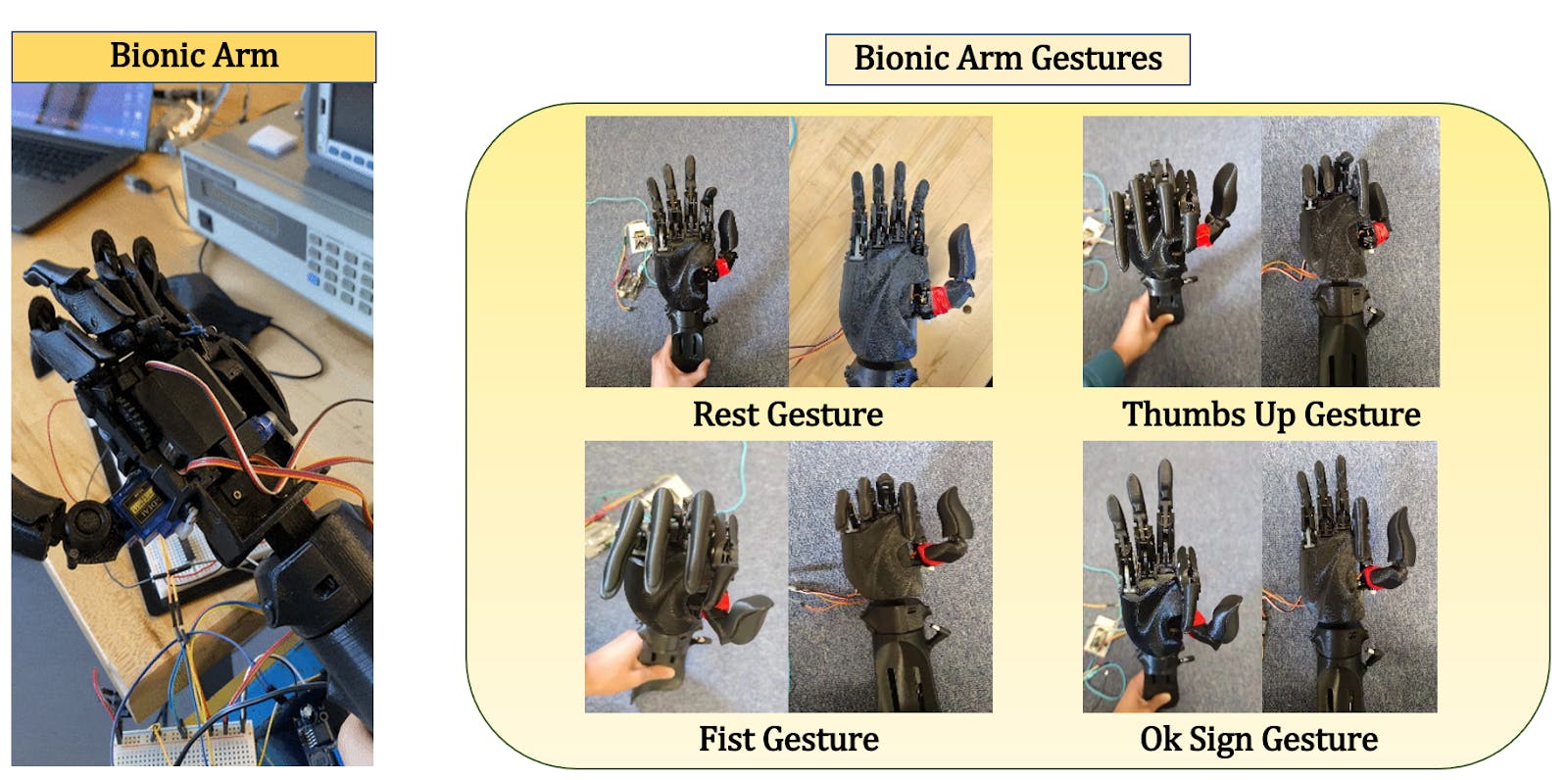
3D - 打印仿生手臂:如圖 7 所示,我們的仿生手臂是基于 Mission ARM JAPAN 非營利組織 [2] 的名為 HACKberry hand 的開源社區(qū)項(xiàng)目進(jìn)行 3D 打印的。
該仿生手臂使用了 3 個伺服系統(tǒng)。SG90 伺服控制中指、無名指和小指。平行伺服控制食指。第二個SG90控制拇指。在我們的項(xiàng)目范圍內(nèi),我們利用仿生手臂執(zhí)行 4 個手勢:休息手勢、豎起大拇指手勢、握拳手勢和確定手勢。
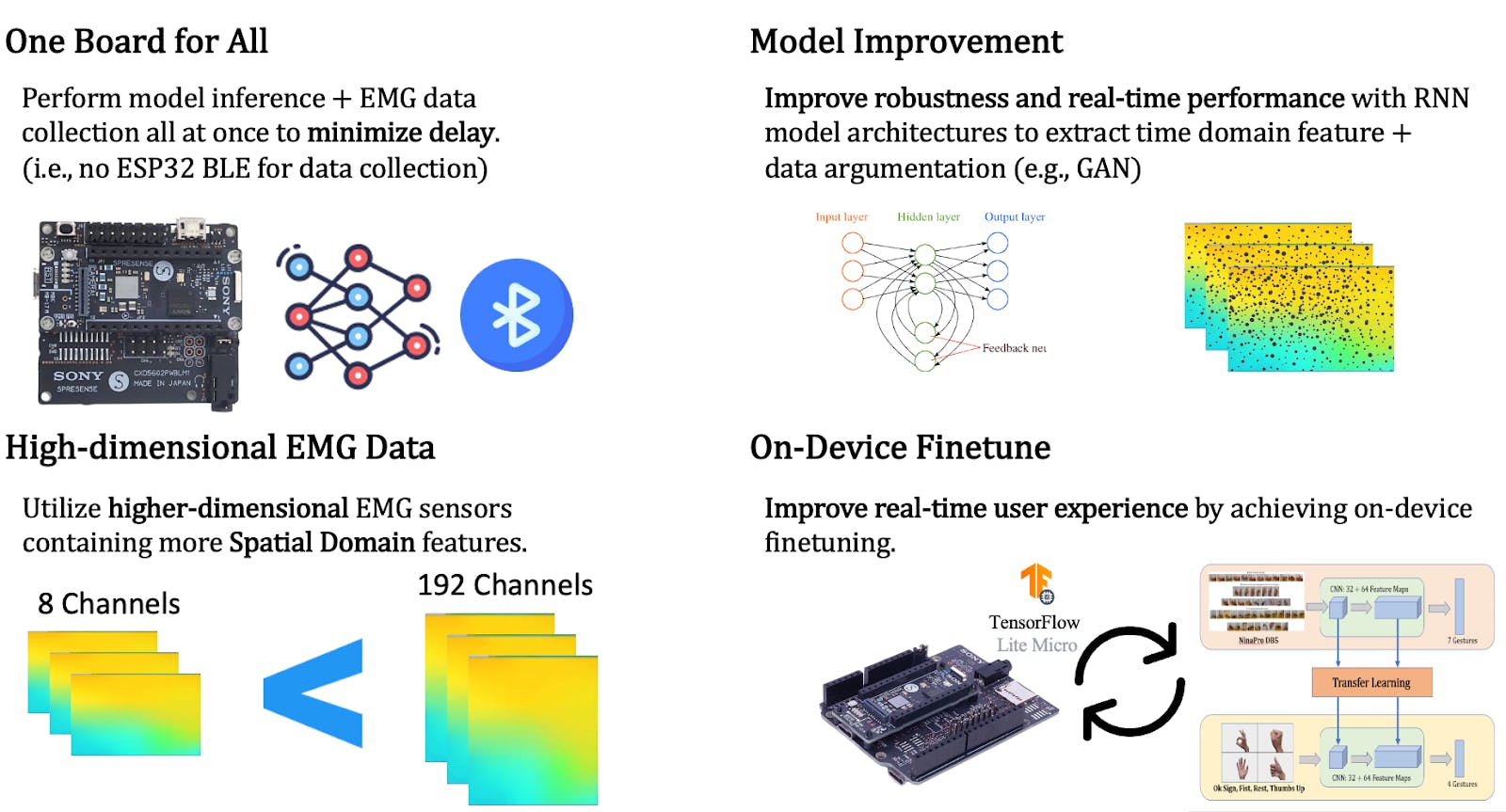
未來工作:在這個項(xiàng)目中,我們成功地將CNN模型部署在Sony Spresense板上,實(shí)現(xiàn)了實(shí)時仿生控制。未來,我們將通過以下方法進(jìn)一步增強(qiáng)我們的系統(tǒng)。首先,中間的 ESP32 導(dǎo)致延遲。通過將藍(lán)牙直接部署到 Sony Spresense 上,我們可以最大限度地減少這種情況。其次,我們可以通過使用 RNN 等其他架構(gòu)來提高模型的魯棒性。此外,我們可以使用 GAN 增強(qiáng)噪聲 EMG 數(shù)據(jù)。第三,我們可以利用更高維度的 EMG 采集傳感器,嵌入更多的特征。(比如 192 個頻道而不是 8 個)最后,我們還可以通過在 Sony Spresense 上實(shí)現(xiàn)設(shè)備上的培訓(xùn)來改善我們的用戶體驗(yàn)。
?
- 使用EMG信號控制機(jī)械臂
- 使用EMG的機(jī)械手控制
- arduino nano作為控制器的仿生手
- 基于R-CNN和PRN的超聲圖像腫瘤自動識別 18次下載
- CNN和DBN在肺結(jié)節(jié)影像分類識別的對比分析 10次下載
- 改進(jìn)膠囊網(wǎng)絡(luò)優(yōu)化分成卷積的亞健康識別 7次下載
- 基于多尺度CNN的交通道路標(biāo)識識別模型 4次下載
- 基于改進(jìn)YOLOv的靜態(tài)手勢實(shí)時識別方法 9次下載
- 基于改進(jìn)CNN網(wǎng)絡(luò)與集成學(xué)習(xí)的人臉識別算法 6次下載
- 基于可變形CNN的數(shù)顯儀表分割與識別方法 10次下載
- 仿生手臂的設(shè)計(jì)與實(shí)現(xiàn)英文文件下載 0次下載
- 融合雙層多頭自注意力與CNN的回歸模型 6次下載
- 一種基于多通道極深CNN的圖像超分辨算法 10次下載
- Arduino與樹莓派打造Chatbot語音控制機(jī)器人手臂 30次下載
- CNN圖像識別的路徑搜索設(shè)計(jì)方案 16次下載
- cnn常用的幾個模型有哪些 272次閱讀
- CNN的定義和優(yōu)勢 483次閱讀
- 如何利用CNN實(shí)現(xiàn)圖像識別 412次閱讀
- 基于CNN-LSTM網(wǎng)絡(luò)的電力負(fù)荷預(yù)測 3252次閱讀
- 如何創(chuàng)建FPGA控制的機(jī)器人手臂 899次閱讀
- 傳感器概述及分類 光電編碼器電路原理及分類 851次閱讀
- 通過紅外對管進(jìn)行手勢識別控制的LED燈設(shè)計(jì) 3598次閱讀
- 采用單片機(jī)和CPLD器件實(shí)現(xiàn)仿人手臂形假肢控制系統(tǒng)的設(shè)計(jì) 1074次閱讀
- 實(shí)現(xiàn)水下波動仿生推進(jìn)器的多電機(jī)獨(dú)立控制設(shè)計(jì)方案 1268次閱讀
- 手把手教你操作Faster R-CNN和Mask R-CNN 1.3w次閱讀
- 深度學(xué)習(xí)進(jìn)軍太空領(lǐng)域——衛(wèi)星實(shí)時圖像識別 5059次閱讀
- 基于光譜圖利用CNN進(jìn)行音頻處理效果不佳的原因 5355次閱讀
- 全卷積網(wǎng)絡(luò)FCN是什么?CNN與FCN有什么關(guān)系? 1.1w次閱讀
- 引入Mask R-CNN思想通過語義分割進(jìn)行任意形狀文本檢測與識別 1.4w次閱讀
- 基于FPGA的通用CNN加速設(shè)計(jì) 1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計(jì)》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論