 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問(wèn)
提問(wèn)  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
從 1992 年到 2007 年,美國(guó)國(guó)家公園每天進(jìn)行大約 11 次搜救 (SAR) 行動(dòng)。每次事件的成本約為 895 美元,總計(jì) 58、572、164 美元。此外,每年約有 700 人因海岸警衛(wèi)隊(duì)的搜救任務(wù)而喪生。更好的培訓(xùn)和技術(shù)進(jìn)步幫助降低了死亡人數(shù)和成本,但仍然相對(duì)昂貴。因此,需要一種能夠最大限度地降低搜尋與援救行動(dòng)的死亡率和成本的新型裝置。
該設(shè)備是一種無(wú)人機(jī),可以成功地在任何地形上自主飛行并搜索丟失的對(duì)象。操作員只需插入電池,撥動(dòng)開(kāi)關(guān),即可按照可配置為任何搜索區(qū)域和模式的編程 SAR 模式起飛。攝像機(jī)拍攝下方地面的視頻,并將輸入輸入計(jì)算模塊以運(yùn)行卷積神經(jīng)網(wǎng)絡(luò) (CNN)。這個(gè) CNN 能夠檢測(cè)到人類(lèi)、汽車(chē)和其他幾個(gè)物體,這些物體可以為 SAR 團(tuán)隊(duì)找到失蹤的對(duì)象提供線索。當(dāng)無(wú)人機(jī)檢測(cè)到人時(shí),如果它移動(dòng),它將跟隨對(duì)象,同時(shí)將帶有時(shí)間戳的 GPS 坐標(biāo)發(fā)送給 SAR 團(tuán)隊(duì)。操作員還可以查看實(shí)時(shí)視頻,以協(xié)調(diào)如何以最安全的方式到達(dá)失蹤對(duì)象。電池電量不足時(shí),無(wú)人機(jī)將自動(dòng)飛回它起飛的地方。使用無(wú)人機(jī)而不是使用直升機(jī)或陸地團(tuán)隊(duì)是執(zhí)行搜尋與援救行動(dòng)的一種更便宜、更安全的方式。團(tuán)隊(duì)可以使用多架這樣的無(wú)人機(jī),快速自主地搜索大片區(qū)域。
代碼:
請(qǐng)克隆我的 GitHub存儲(chǔ)庫(kù)以跟隨本教程。
第 1 步,設(shè)置您的 Raspberry Pi
在本教程中,我使用了 Raspberry Pi 4 Model B 4GB。如果您有 8GB 版本,請(qǐng)隨意使用它以獲得更好的性能(您將獲得更多 fps,從而實(shí)現(xiàn)更好的跟蹤功能)。但是,我從未使用 8GB 版本對(duì)其進(jìn)行過(guò)測(cè)試。該項(xiàng)目確實(shí)適用于 Raspberry Pi 3 Model B+,但 fps 較慢。
如果這是您第一次使用 Raspberry Pi,請(qǐng)確保使用最新的 Raspberry Pi 操作系統(tǒng)進(jìn)行設(shè)置。請(qǐng)按照本教程獲取指導(dǎo)。如果您過(guò)去使用過(guò) Raspberry Pi,請(qǐng)確保使用全新的 RPI 操作系統(tǒng)刷新您的 SD 卡。
啟動(dòng)并設(shè)置好所有內(nèi)容后,在終端中輸入:
$ sudo raspi-config
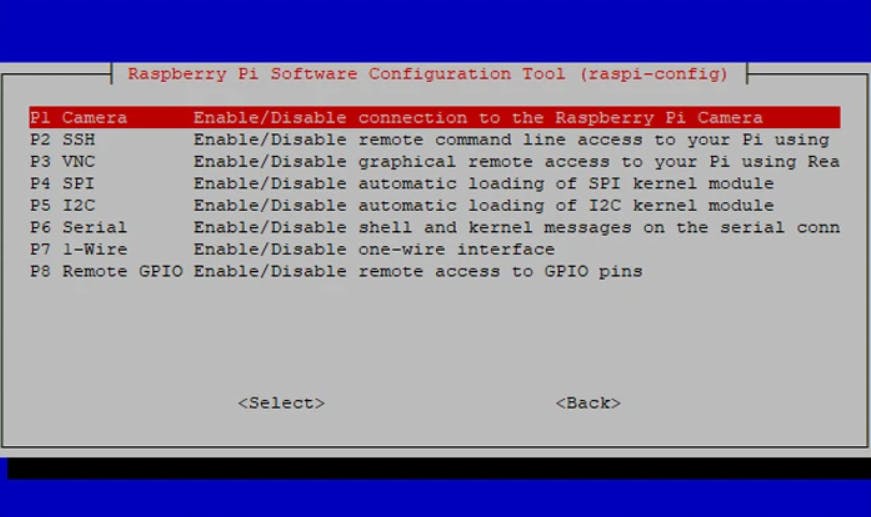
使用箭頭鍵導(dǎo)航到該Interface Options部分并按enter。
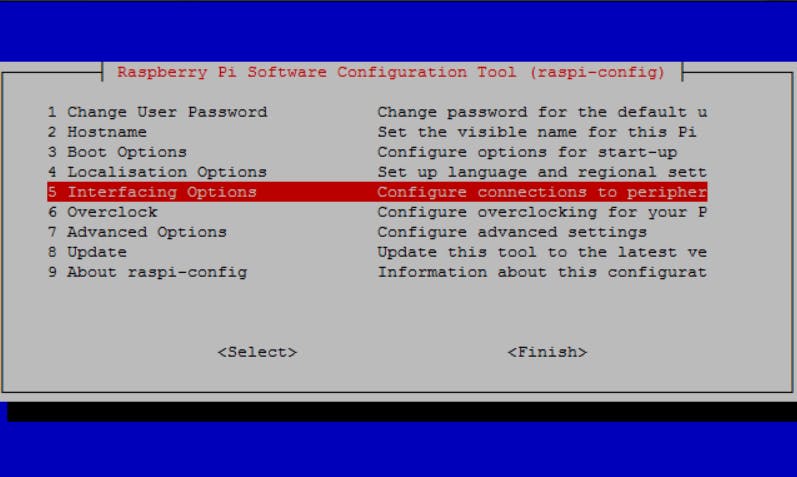
您將需要通過(guò)此菜單打開(kāi)相機(jī)、SSH 和串行:
完成后,您可以退出并重新啟動(dòng)。
啟用相機(jī)將使我們能夠執(zhí)行必要的計(jì)算機(jī)視覺(jué)以檢測(cè)失蹤人員。SSH 將允許您通過(guò)筆記本電腦/PC 遠(yuǎn)程編程和控制 RPI,而無(wú)需將兩者連接在一起。這只是為了方便和安全。Serial 將允許 RPI 通過(guò)MAVLink與我們的機(jī)載飛行控制器進(jìn)行通信。
啟用攝像頭、SSH 和串行后,您現(xiàn)在可以通過(guò) SSH 連接到 RPI。
首先,通過(guò)在 RPI 的終端中鍵入以下內(nèi)容來(lái)找出您的 RPI 的 IP 地址:
$ hostname -I
如果您使用的是 Windows 筆記本電腦/PC,請(qǐng)確保您已安裝 OpenSSH 客戶(hù)端。轉(zhuǎn)到設(shè)置 > 應(yīng)用程序 > 應(yīng)用程序和功能 > 可選功能 > 在文本字段中搜索 OpenSSH 客戶(hù)端,如果尚未安裝,請(qǐng)選擇安裝 OpenSSH 客戶(hù)端。
然后在您的終端(對(duì)于 Linux 或 Windows 用戶(hù))中輸入:
ssh pi@
替換
然后將提示您輸入pi登錄密碼。Raspberry Pi OS 上的默認(rèn)密碼是raspberry.
然后,確保在終端中使用以下兩個(gè)命令更新 RPI:
$ sudo apt-get update
$ sudo apt-get upgrade
第 2 步,設(shè)置您的珊瑚 TPU
現(xiàn)在,我們可以開(kāi)始安裝必要的軟件包和程序,通過(guò) Google Coral Edge TPU USB 加速器啟用計(jì)算機(jī)視覺(jué)。
首先,添加 Coral Edge TPU 包存儲(chǔ)庫(kù):
$ echo "deb https://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudo tee /etc/apt/sources.list.d/coral-edgetpu.list
$ curl https://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -
$ sudo apt-get update
現(xiàn)在,安裝 EdgeTPU 運(yùn)行時(shí)庫(kù):
$ sudo apt-get install libedgetpu1-std
接下來(lái),安裝 EdgeTPU Python API:
$ sudo apt-get install python3-edgetpu
然后重新啟動(dòng)以完成安裝過(guò)程:
$ sudo reboot now
我們現(xiàn)在將設(shè)置一個(gè) Python 虛擬環(huán)境來(lái)幫助隔離本教程中使用的 Python 包。我們將使用 virtualenv 和 virtualenvwrapper。
首先,安裝 pip:
$ wget https://bootstrap.pypa.io/get-pip.py
$ sudo python get-pip.py
$ sudo python3 get-pip.py
$ sudo rm -rf ~/.cache/pip
接下來(lái),安裝 virtualenv 和 virtualenvwrapper:
$ sudo pip install virtualenv virtualenvwrapper
安裝后,編輯~/.bashrc文件:
$ sudo nano ~/.bashrc
將以下行添加到文件的底部:
# virtualenv and virtualenvwrapper
export WORKON_HOME=$HOME/.virtualenvs
export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python3
source /usr/local/bin/virtualenvwrapper.sh
ctrl + x使用, y,保存并退出enter。
接下來(lái),重新加載您的~/.bashrc文件以應(yīng)用我們的更改:
$ source ~/.bashrc
最后,創(chuàng)建我們的 Python 3 虛擬環(huán)境:
$ mkvirtualenv sar -p python3
注意:從現(xiàn)在開(kāi)始,請(qǐng)始終確保您處于sar虛擬環(huán)境中。如果不是,請(qǐng)使用以下命令:
$ workon sar
現(xiàn)在我們需要?jiǎng)?chuàng)建一個(gè)符號(hào)鏈接來(lái)將我們的 EdgeTPU 運(yùn)行時(shí)鏈接到我們的 sar 虛擬環(huán)境中。
運(yùn)行此命令以查找 Python EdgeTPU 包的安裝路徑:
$ dpkg -L python3-edgetpu
...
/usr/lib/python3
/usr/lib/python3/dist-packages
/usr/lib/python3/dist-packages/edgetpu
/usr/lib/python3/dist-packages/edgetpu/__init__.py
...
注意線/usr/lib/python3/dist-packages/edgetpu。這是我們的 edgetpu 庫(kù)的根目錄。
現(xiàn)在,我們可以創(chuàng)建符號(hào)鏈接:
$ cd ~/.virtualenvs/sar/lib/python3.7/site-packages
$ ln -s /usr/lib/python3/dist-packages/edgetpu/ edgetpu
$ cd ~
要測(cè)試我們的安裝,請(qǐng)打開(kāi) Python shell:
$ workon sar
$ python
>>> import edgetpu
>>> edgetpu.__version__
'2.12.2'
通過(guò)安裝使用 PiCamera 和執(zhí)行圖像處理所需的 python 包,完成 Coral TPU 的設(shè)置過(guò)程:
$ pip install "picamera[array]" # Raspberry Pi only
$ pip install numpy
$ pip install opencv-contrib-python==4.1.0.25
$ pip install imutils
$ pip install scikit-image
$ pip install pillow
現(xiàn)在我們可以在示例程序上測(cè)試 TPU。
首先,安裝示例包:
$ sudo apt-get install edgetpu-examples
然后,將寫(xiě)入權(quán)限添加到示例目錄:
$ sudo chmod a+w /usr/share/edgetpu/examples
更改目錄并運(yùn)行測(cè)試程序:
$ cd /usr/share/edgetpu/examples
$ python classify_image.py \
--mode models/mobilenet_v2_1.0_224_inat_bird_quant_edgetpu.tflite \
--label models/inat_bird_labels.txt \
--image images/parrot.jpg
---------------------------
Ara macao (Scarlet Macaw)
Score : 0.61328125
---------------------------
Platycercus elegans (Crimson Rosella)
Score : 0.15234375
如果您收到與上述類(lèi)似的回復(fù),則表示您所做的一切都是正確的。
如果你很好奇,下面是parrot.jpg這樣的:
第三步,安裝 DroneKit:
DroneKit允許我們利用配套計(jì)算機(jī)(在我們的例子中為 RPI)來(lái)控制基于ArduPilot的飛行控制器。在本教程中,我們使用 RPI 和 Google Coral TPU 執(zhí)行對(duì)象檢測(cè),同時(shí)向 PixHawk 4 飛行控制器發(fā)送命令以移動(dòng)我們的無(wú)人機(jī)并尋找失蹤人員。
首先,確保您已安裝 pip 和 python-dev:
$ sudo apt-get install python-pip python-dev
接下來(lái),安裝 DroneKit:
$ workon sar
$ pip install dronekit
$ pip install dronekit-sitl
現(xiàn)在我們用一個(gè)簡(jiǎn)單的程序測(cè)試我們的安裝。首先,我們需要克隆 GitHub 存儲(chǔ)庫(kù):
$ git clone https://github.com/bandofpv/SAR_Drone
導(dǎo)航到SAR_Drone存儲(chǔ)庫(kù)并運(yùn)行測(cè)試程序:
$ cd SAR_Drone
$ python dronekit_test.py
如果安裝正確,您應(yīng)該得到以下響應(yīng):
Start simulator (SITL)
Downloading SITL from http://dronekit-assets.s3.amazonaws.com/sitl/copter/sitl-win-copter-3.3.tar.gz
Extracted.
Connecting to vehicle on: 'tcp:127.0.0.1:5760'
>>> APM:Copter V3.3 (d6053245)
>>> Frame: QUAD
>>> Calibrating barometer
>>> Initialising APM...
>>> barometer calibration complete
>>> GROUND START
Get some vehicle attribute values:
GPS: GPSInfo:fix=3,num_sat=10
Battery: Battery:voltage=12.587,current=0.0,level=100
Last Heartbeat: 0.713999986649
Is Armable?: False
System status: STANDBY
Mode: STABILIZE
Completed
第 4 步,建造無(wú)人機(jī):
在本教程中,我假設(shè)您在構(gòu)建無(wú)人機(jī)方面有相當(dāng)多的經(jīng)驗(yàn),所以我不會(huì)詳細(xì)介紹我如何構(gòu)建我的無(wú)人機(jī),因?yàn)樗鄬?duì)簡(jiǎn)單且不言自明。
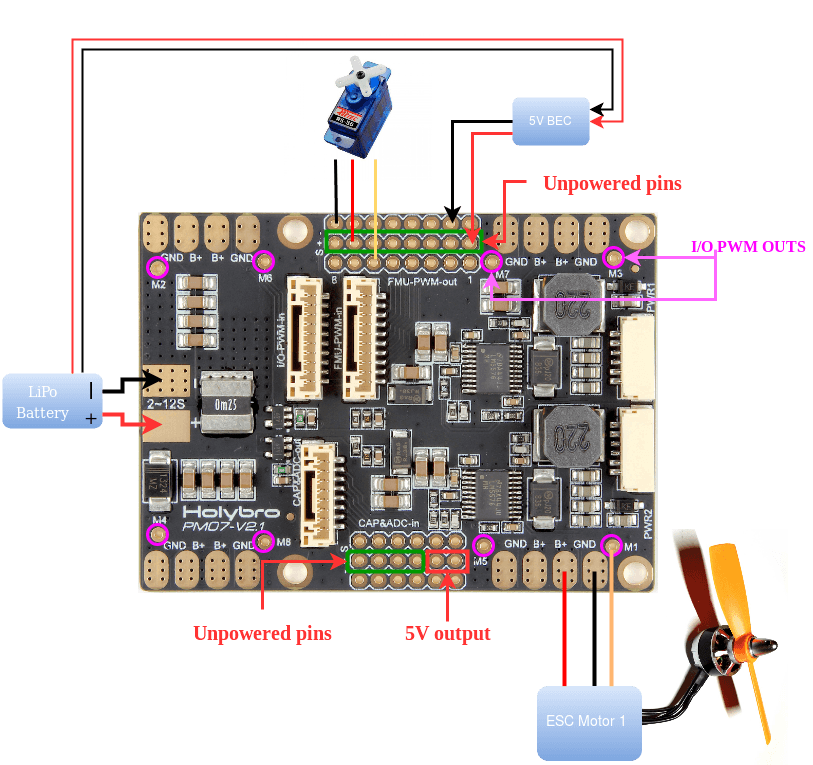
電機(jī)和電調(diào)放置都是標(biāo)準(zhǔn)的。這是一個(gè)很好的示意圖,說(shuō)明了如何將電池、電機(jī)和 ESC 連接到 PDB 上:
PDB 安裝在框架的中心(通常是飛行控制器所在的位置),因?yàn)?PixHawk 4 無(wú)法放入其中:

所以 PixHawk 4 飛控是倒掛在機(jī)身底板底部的。確保還使用防振泡沫/凝膠來(lái)安裝飛行控制器,以減少可能影響飛行性能的振動(dòng):
云臺(tái)也安裝在框架底板的底部,但我使用金屬支架將云臺(tái)抬離底板,為飛行控制器留出空間。FPV 攝像頭和 RPI RX 也都安裝在底板的底部:
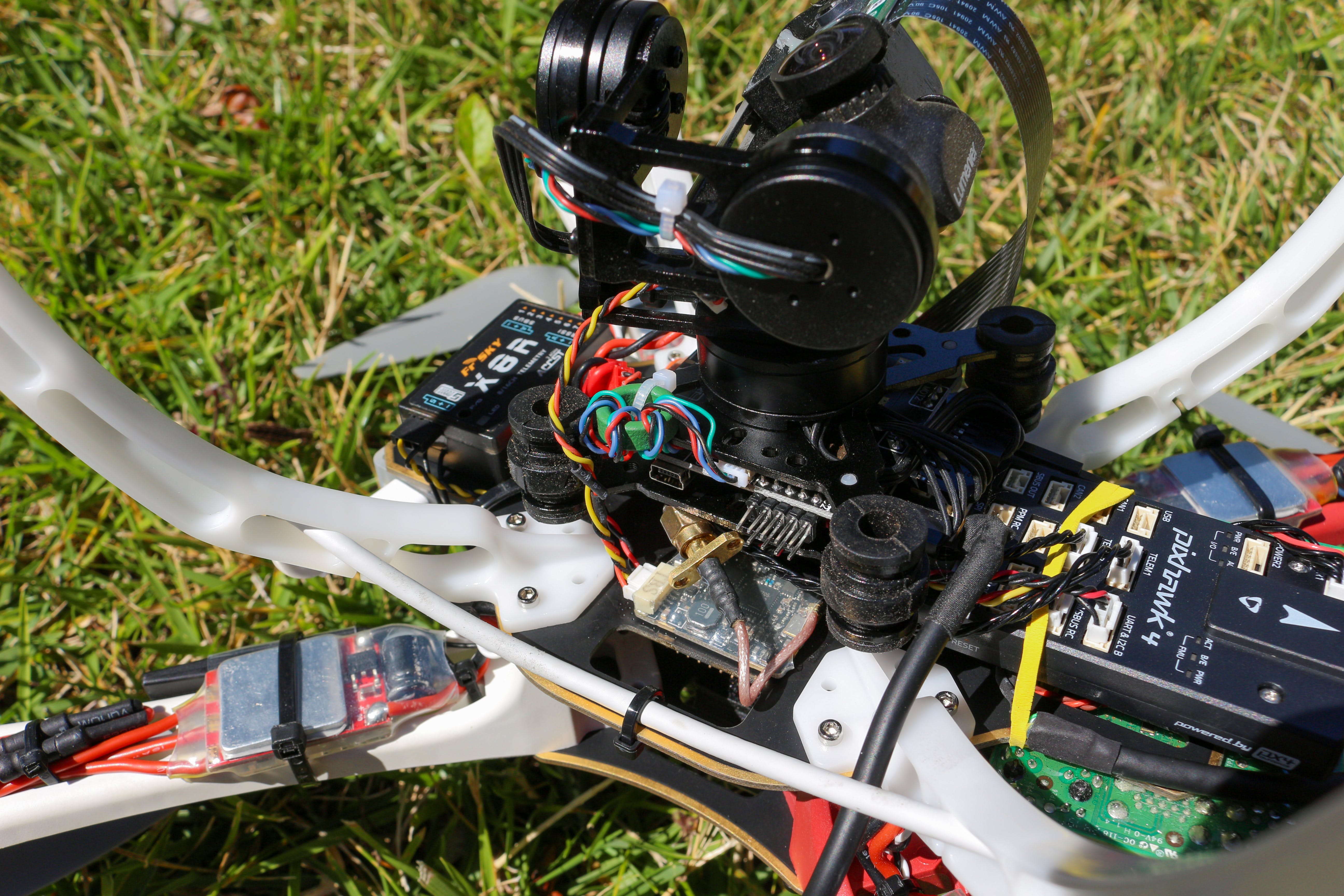
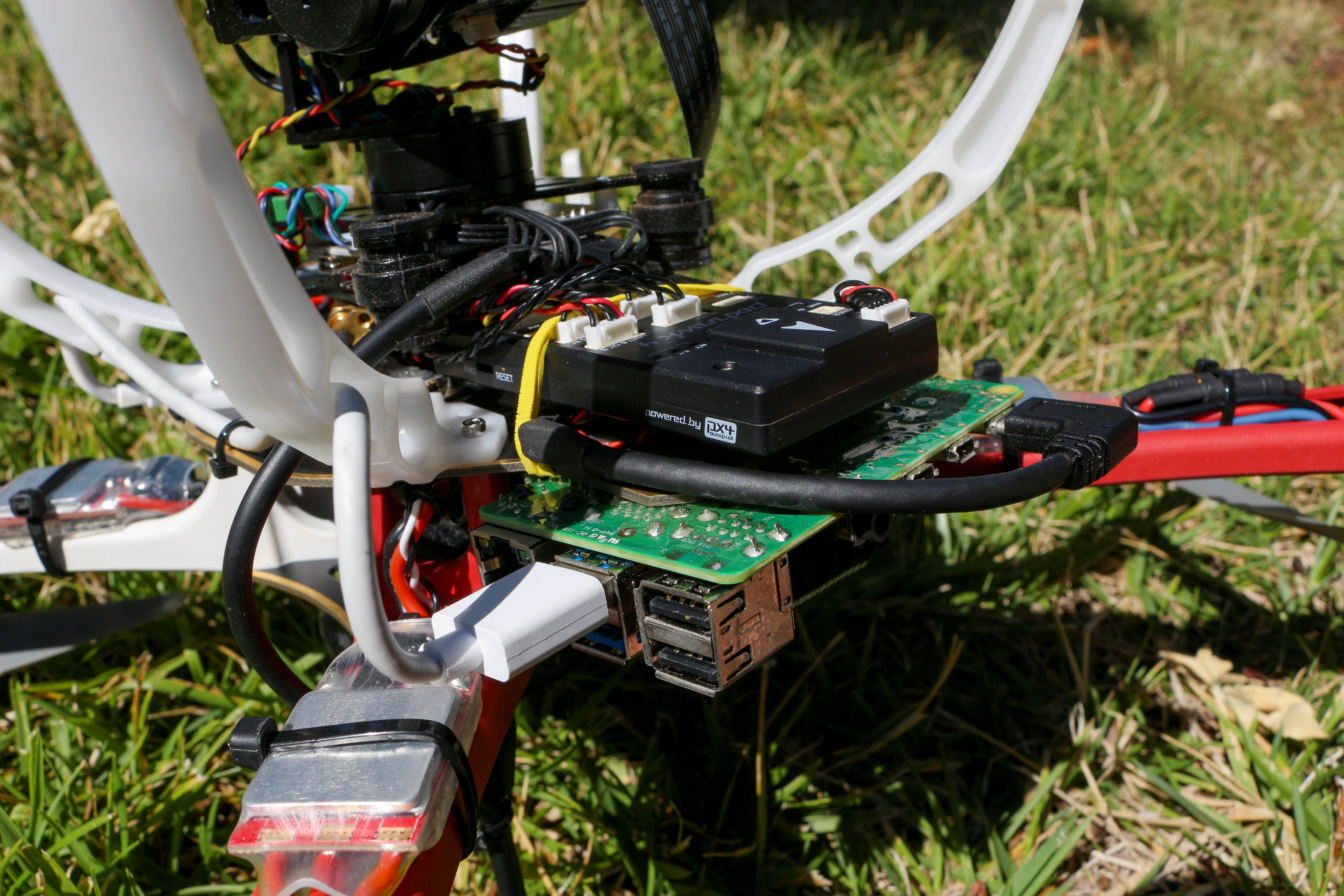
RPI 安裝在底板頂部的前部,而 Coral TPU 安裝在背面:

GPS 模塊和天線都直立安裝,并且彼此之間保持盡可能遠(yuǎn)的距離,以最大程度地減少干擾:

注意:請(qǐng)確保 GPS 模塊上的箭頭向前對(duì)齊并與飛控對(duì)齊。
您還必須修改 USB-C 連接器以通過(guò)電池為 RPI 供電。這可以通過(guò)剝?nèi)?USB-C 電纜的電纜并將紅色和黑色的大線焊接到 5V UBEC 來(lái)簡(jiǎn)單地完成。將 UBEC 的輸入電源連接到 PDB(連接電池的地方),RPI 將獲得電源。
連接 FPV 系統(tǒng)的相機(jī)設(shè)置非常簡(jiǎn)單。只需將 VTX 的電源線焊接到 PDB 并將攝像機(jī)連接到 VTX 和天線。
接下來(lái),我們需要連接 PixHawk 4 飛行控制器:
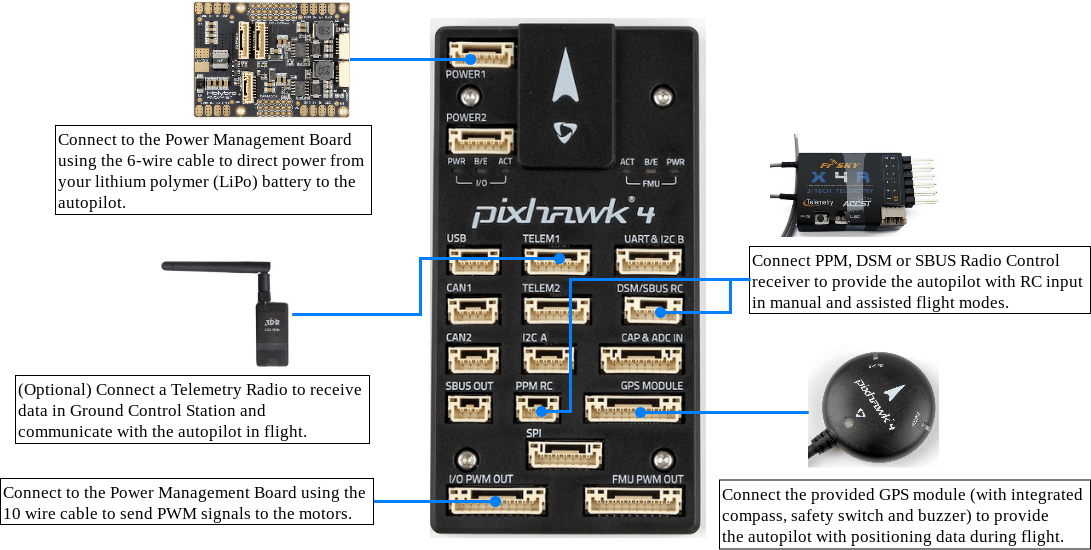
您可以忽略遙測(cè)無(wú)線電,因?yàn)樗恍枰驗(yàn)槲覀儗⑹褂?FrSky 的智能端口遙測(cè)技術(shù)。
如圖所示連接遙測(cè)電纜(鏈接在BOM中):
連接到 PixHawk 4 的電纜將插入UART & I2C B端口。
現(xiàn)在,我們需要將云臺(tái)連接到飛行控制器,以便我們可以從 RPI 和/或我們的無(wú)線電發(fā)射器控制云臺(tái)。上面鏈接的云臺(tái)預(yù)裝了 STorM32,所以我們需要做的就是將三根線焊接到云臺(tái)上:
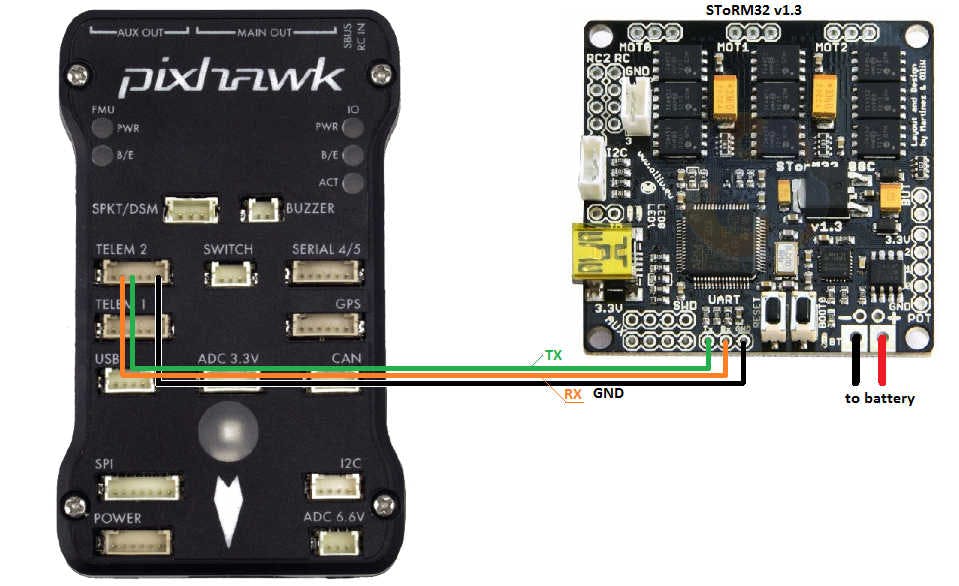
與其將其連接到TELEM 2,不如將其連接到 ,TELEM 1因?yàn)槲覀儗?/font>TELEM 2用于與 RPI 進(jìn)行通信。
最后但同樣重要的是,我們可以將 RPI 連接到 PixHawk 4 以允許 RPI 通過(guò) MavLink 向飛行控制器發(fā)送命令:
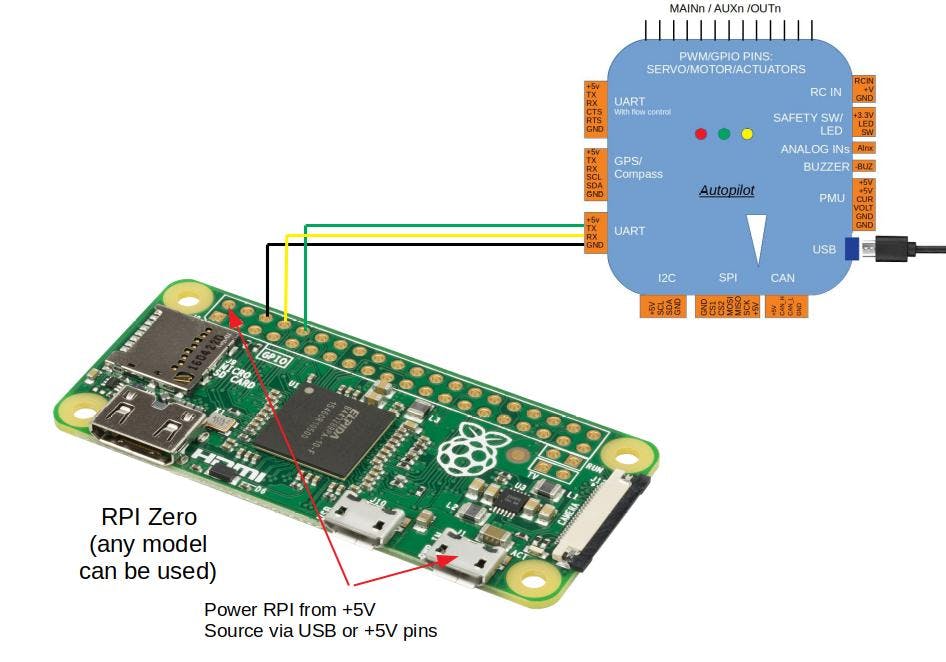
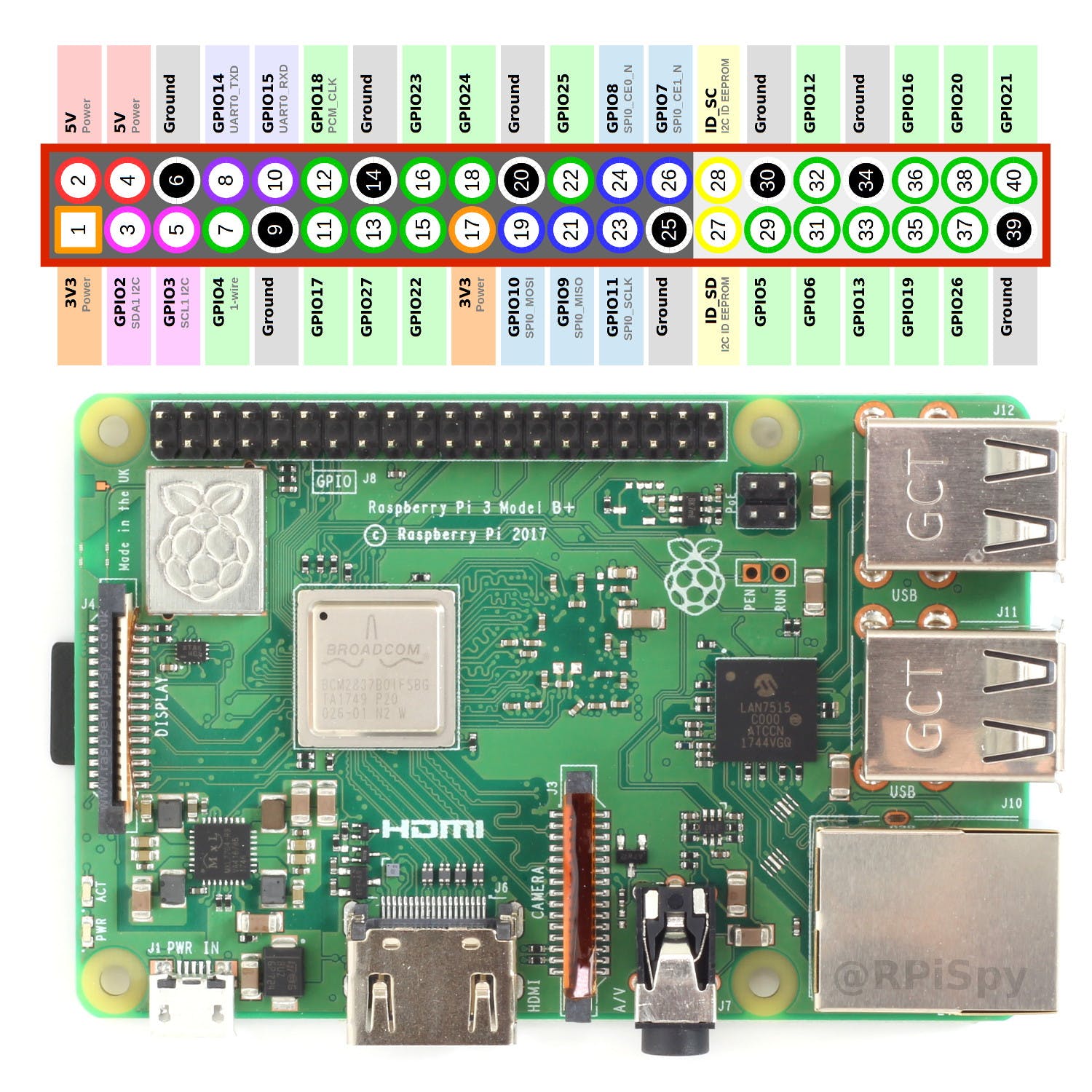
此插圖使用 RPI 零,但過(guò)程相同。將飛行控制器的TELEM 2端口連接到 RPI 的Ground,TX和RX引腳。這是 RPI 4 Model B 的引腳排列(圖像是 RPI 3 Model B+,但引腳排列相同):
重要的是要意識(shí)到您將 RPI 連接TX到飛行控制器RX,并將 RPIRX連接到飛行控制器的TX.
第五步,調(diào)整云臺(tái)設(shè)置:
雖然項(xiàng)目BOM中鏈接的云臺(tái)預(yù)裝了 STOrM32 并進(jìn)行了預(yù)校準(zhǔn),但如果云臺(tái)仍未調(diào)平,有時(shí)您必須調(diào)整微調(diào)。要測(cè)試是否需要修剪云臺(tái),請(qǐng)插入電池為其供電。確保您在水平面上啟動(dòng)它并保持靜止,直到您聽(tīng)到嗶嗶聲并且云臺(tái)將初始化并嘗試保持在穩(wěn)定位置。如果該穩(wěn)定位置與地平線不齊,則需要修剪云臺(tái)電機(jī)。
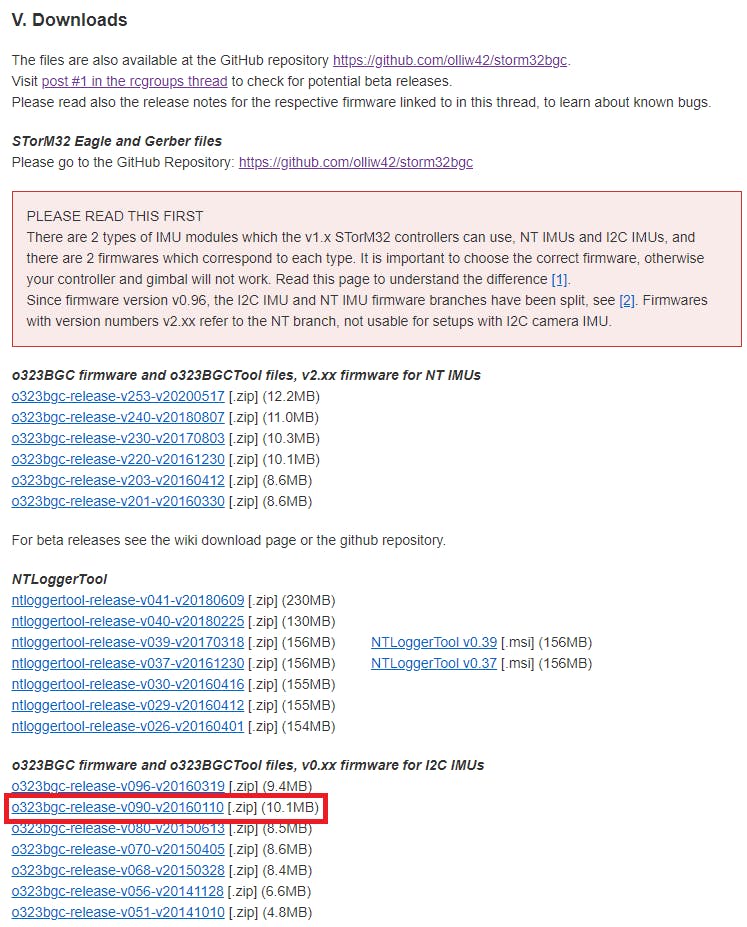
首先,下載o323BGC 固件。這個(gè) GUI 將允許我們修剪云臺(tái)。下載名為:的 zip 文件很重要o323bgc-release-v090-v20160110:
下載后,在您的文件夾中找到它,Downloads然后雙擊 zip 文件將其打開(kāi)。雙擊名為的文件夾o323bgc-release-v090-v20160110,然后雙擊名為o323BGCTool_v090. 它會(huì)提示你:
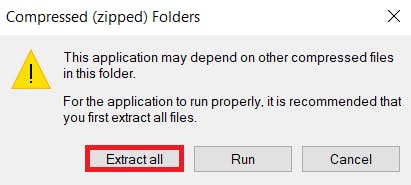
單擊按鈕并通過(guò)在第二個(gè)提示中Extract all進(jìn)行選擇來(lái)提取文件。Extract我選擇了默認(rèn)位置,因?yàn)槲也恍枰L(zhǎng)時(shí)間保留此應(yīng)用程序。如果您確實(shí)計(jì)劃在將來(lái)使用 GUI,那么將其解壓縮到您的Program Files文件夾中可能會(huì)有所幫助。
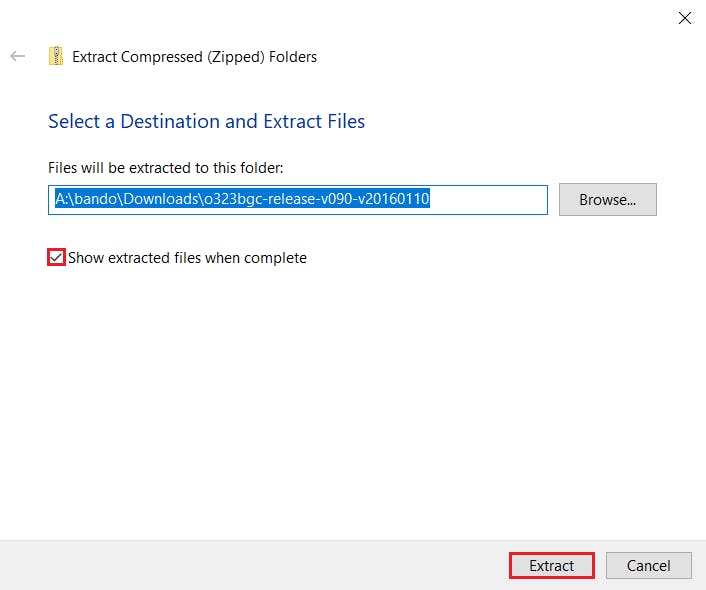
如果您保持Show extracted files when complete選中狀態(tài),它應(yīng)該會(huì)自動(dòng)打開(kāi)提取所有文件的文件夾。再次,雙擊名為的文件夾o323bgc-release-v090-v20160110,然后雙擊名為o323BGCTool_v090. 這次它將打開(kāi) GUI 應(yīng)用程序。打開(kāi)它時(shí),您可能會(huì)收到更新提示。只是忽略該消息。
接下來(lái),通過(guò) Mini USB B 連接器將云臺(tái)插入電腦。
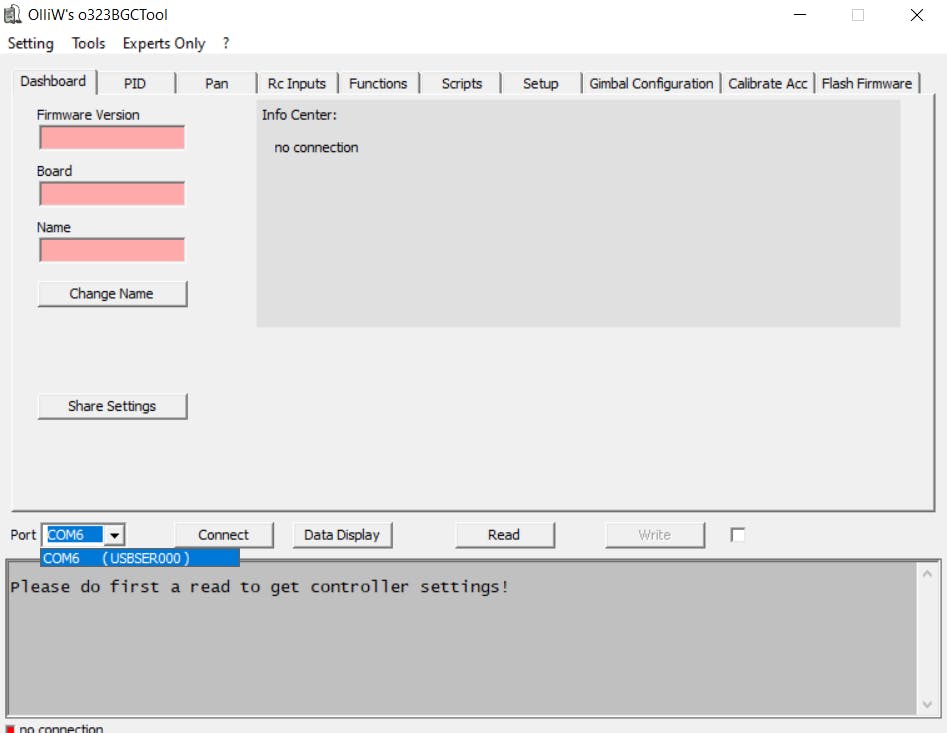
然后,導(dǎo)航到 GUI 的左下角以選擇正確的端口。我的是COM6:
拔下任何/所有 USB 設(shè)備以避免 COM 端口之間的混淆也可能會(huì)有所幫助。
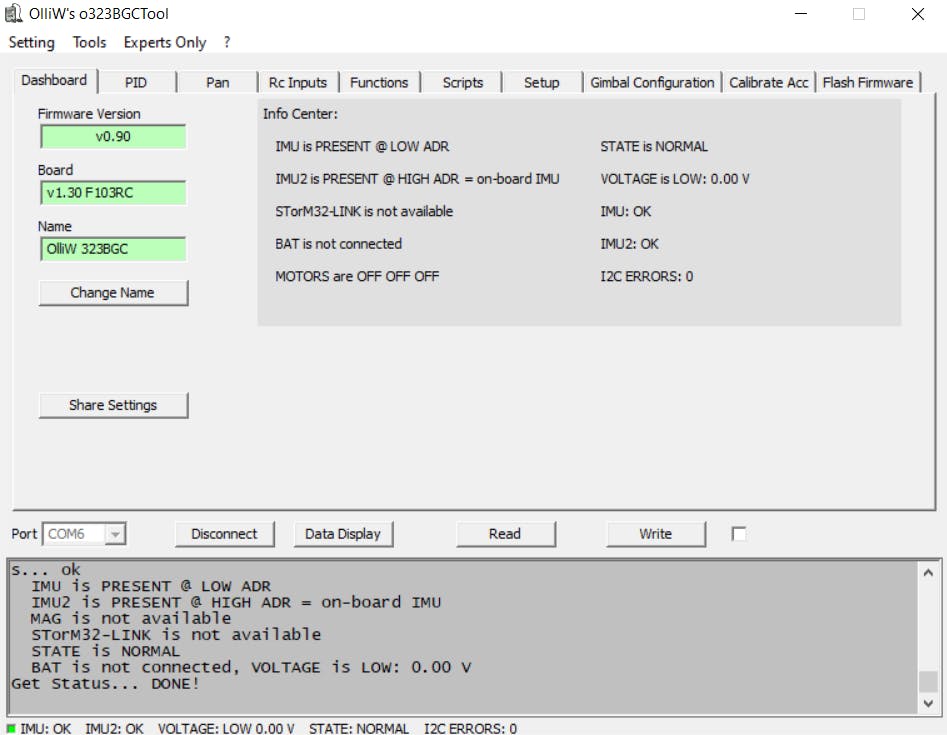
現(xiàn)在,單擊Connect端口下拉菜單旁邊的按鈕。它應(yīng)該會(huì)讀取有關(guān)云臺(tái)板的大量信息,完成后應(yīng)如下所示:
導(dǎo)航到Rc Inputs選項(xiàng)卡:
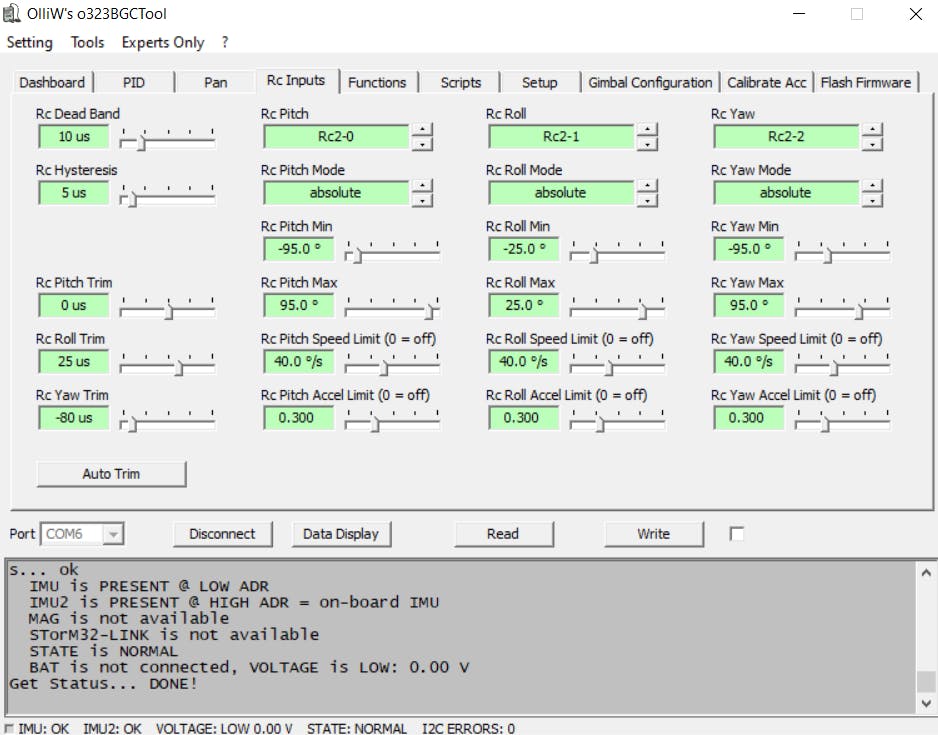
您現(xiàn)在將看到調(diào)整修剪的選項(xiàng)。有一個(gè)選項(xiàng)Auto Trim,但我發(fā)現(xiàn)手動(dòng)執(zhí)行它更容易。
首先,您需要插入電池并等待其初始化(等待嗶聲)。
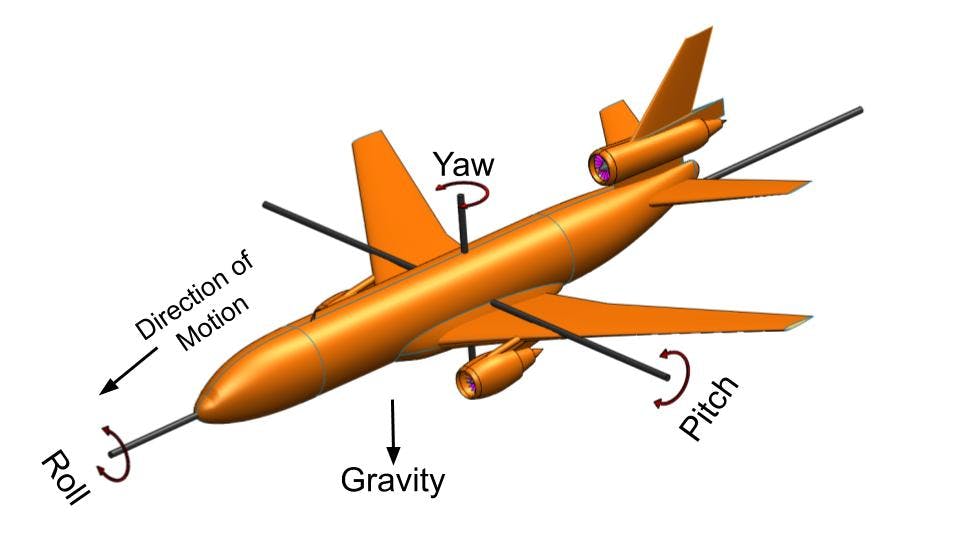
然后,您可以在 GUI 中調(diào)整修剪并單擊Write按鈕以使更改生效。作為參考,這里有一個(gè)很好的圖表來(lái)解釋 Pitch、Roll 和 Yaw 之間的區(qū)別:
一旦您的云臺(tái)與地平線齊平,單擊Disconnect按鈕并拔下 USB 數(shù)據(jù)線。
第六步,設(shè)置飛控:
設(shè)置 PixHawk 4 相對(duì)簡(jiǎn)單。您需要做的就是遵循首次設(shè)置指南。它將引導(dǎo)您安裝 Mission Planner(安裝在筆記本電腦/PC 上)、刷新新固件和配置。
注意:配置飛行模式時(shí),至少有Stabilize、Guided和RTL模式很重要。Stabilize將需要手動(dòng)控制飛機(jī),Guided是允許 RPI 控制直升機(jī)的模式,并且RTL作為安全機(jī)制很好。
完成后,按照首次飛行指南將您的無(wú)人機(jī)帶上試飛。玩得開(kāi)心駕駛你的無(wú)人機(jī)!
如果一切正常并且您有一個(gè)成功的處女座,我們可以開(kāi)始設(shè)置飛控以與 RPI、云臺(tái)和智能端口一起使用。
在 Mission Planner 上,單擊CONFIG選項(xiàng)卡并導(dǎo)航到以下Full Parameter List部分:
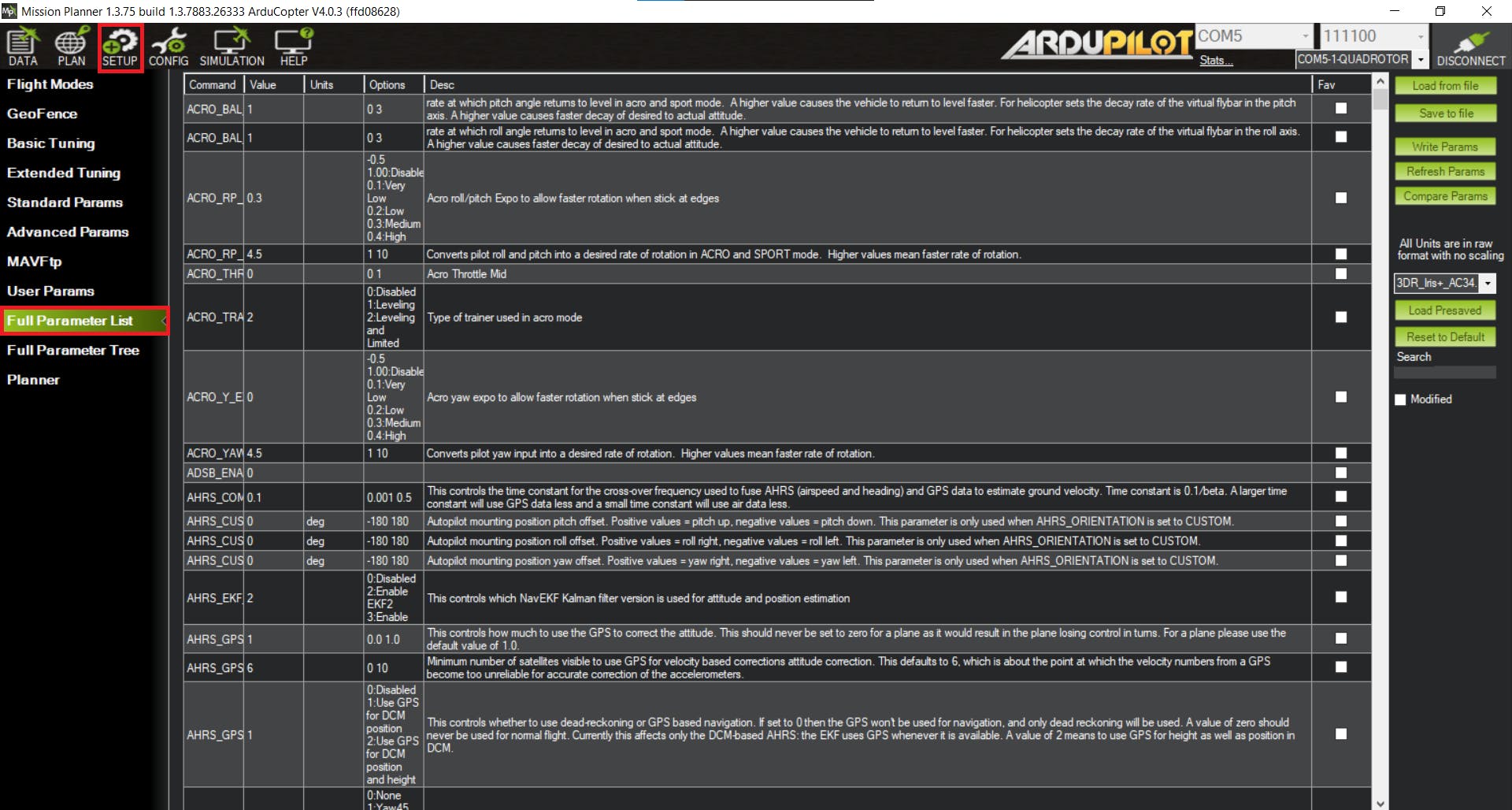
我們將需要更改以下設(shè)置:
- SERIAL2_PROTOCOL = 2
- SERIAL2_BAUD = 921
- SERIAL1_BAUD = 115
- SERIAL1_PROTOCOL = 8
- BRD_SER1_RTSCTS = 0
- MNT_RC_IN_TILT = 6(這將允許您通過(guò) Ch. 6 旋鈕控制云臺(tái)的俯仰)
- 設(shè)置 MNT_TYPE = 5
- SERIAL4_PROTOCOL = 10
而不是滾動(dòng)瀏覽所有參數(shù)選項(xiàng),使用位于 Mission Planner 右側(cè)的搜索功能非常重要:
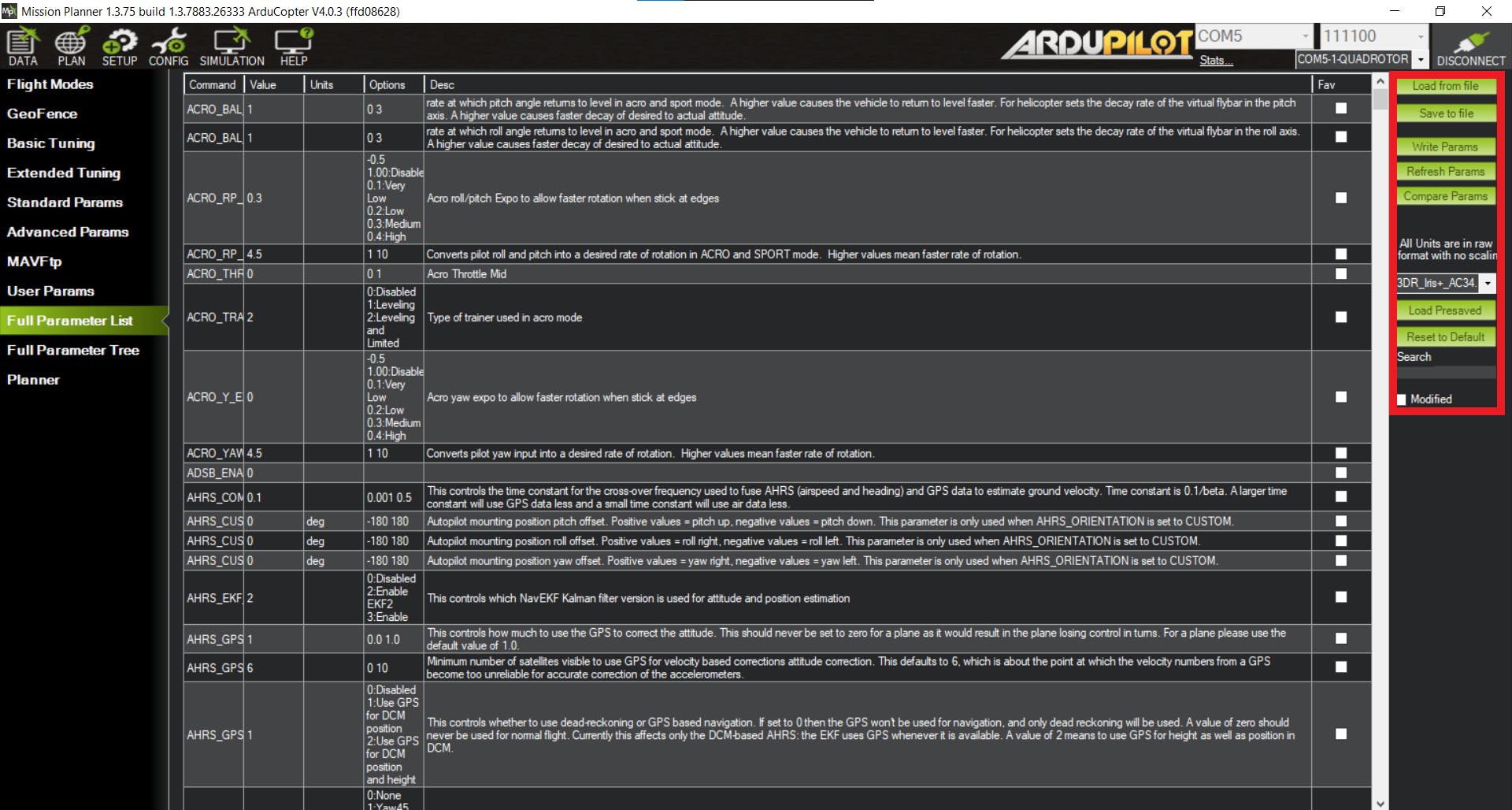
進(jìn)行適當(dāng)?shù)膮?shù)更改后,您可以單擊Write Params按鈕應(yīng)用更改。
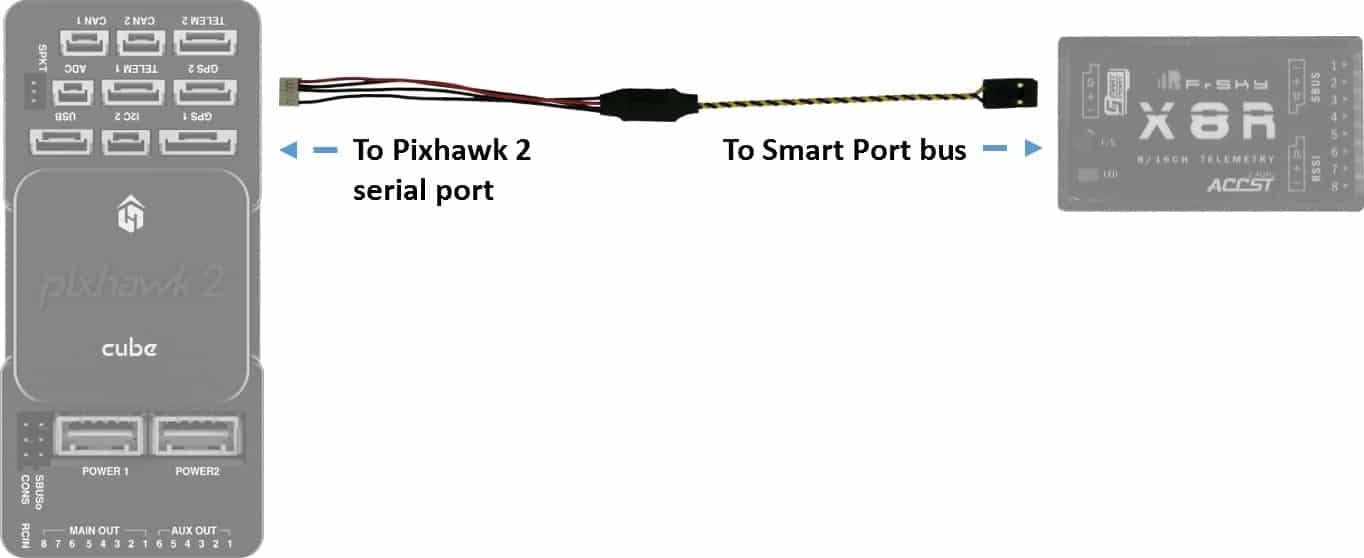
第 7 步,設(shè)置遙測(cè):
現(xiàn)在我們可以設(shè)置我們的無(wú)線電控制器來(lái)接收實(shí)時(shí)遙測(cè)數(shù)據(jù)(電池、GPS 坐標(biāo)等)。本教程使用 Taranis X9D+,但任何 Taranis 型號(hào)都可以使用。
首先,確保您的收音機(jī)已綁定到無(wú)人機(jī)的接收器。這個(gè)過(guò)程很簡(jiǎn)單。只需在您的收音機(jī)上創(chuàng)建一個(gè)新模型并導(dǎo)航到該Model Setup頁(yè)面。向下滾動(dòng)到該Mode部分并選擇 D16。然后,向下滾動(dòng)到該Receiver No.部分并單擊綁定按鈕。現(xiàn)在,找到bind無(wú)人機(jī)接收器上的按鈕。按住此按鈕,然后插入電池。繼續(xù)按住此按鈕,直到接收器上的燈變?yōu)榫G色。一旦發(fā)生這種情況,您可以單擊bind發(fā)射器上的按鈕來(lái)完成綁定過(guò)程。
我們現(xiàn)在可以在我們的發(fā)射器上安裝一個(gè) lua 腳本,它將以一種很好的格式組織我們所有的遙測(cè)數(shù)據(jù):

第一步是使用最新的 OpenTX 版本刷新收音機(jī)。
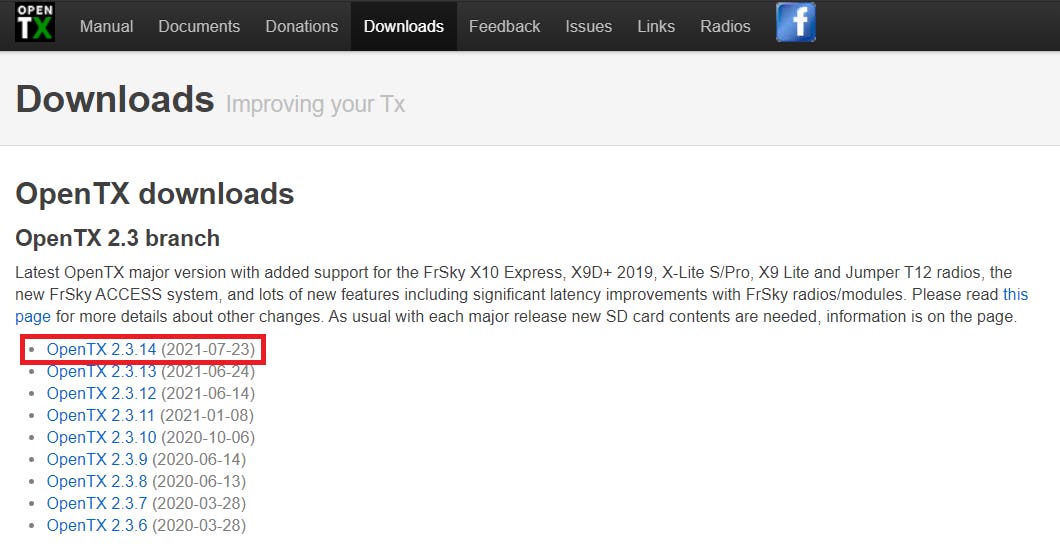
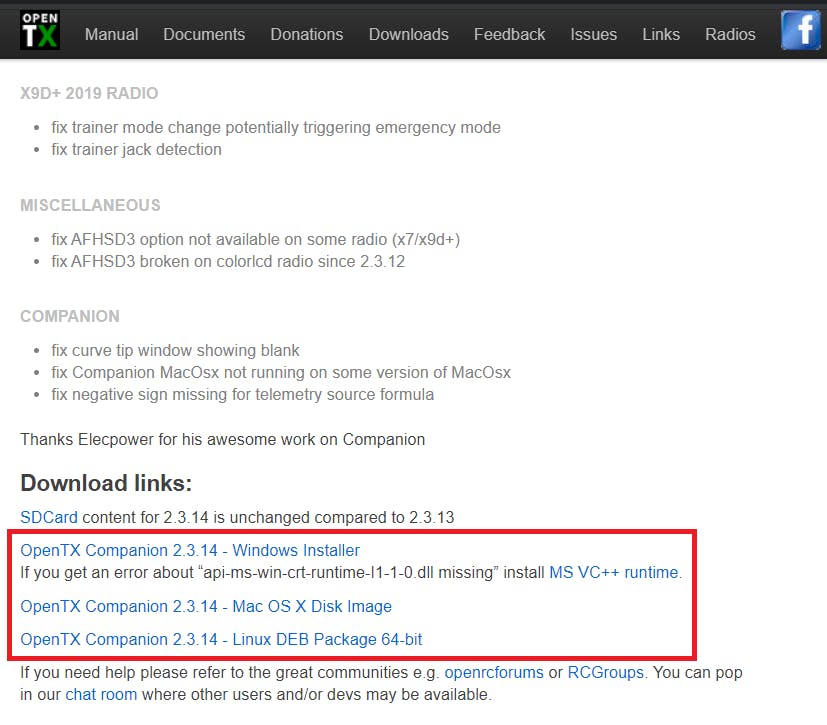
首先,下載最新版本的 OpenTX 伴侶。轉(zhuǎn)到 OpenTX下載頁(yè)面并選擇最新版本:
向下滾動(dòng)到該Download links:部分并下載并安裝OpenTX Companion到您的操作系統(tǒng):
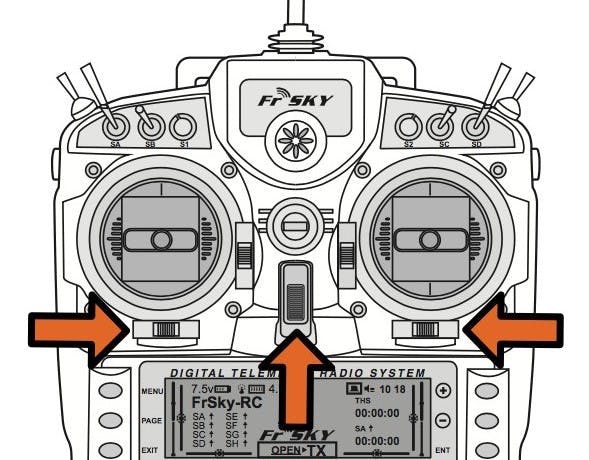
現(xiàn)在,通過(guò)在開(kāi)機(jī)時(shí)向內(nèi)按下兩個(gè)水平微調(diào)按鈕,將您的收音機(jī)置于引導(dǎo)加載程序模式:
現(xiàn)在將 USB 電纜插入收音機(jī)并將其連接到您的計(jì)算機(jī)。
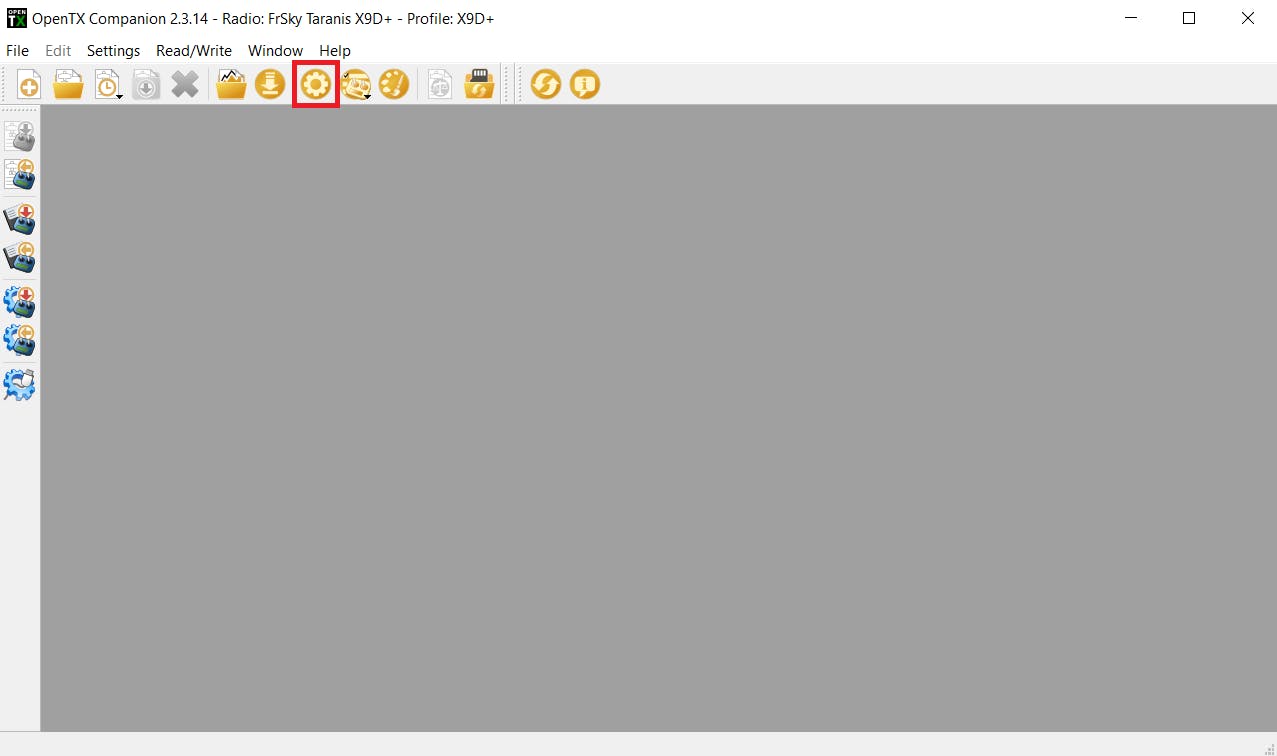
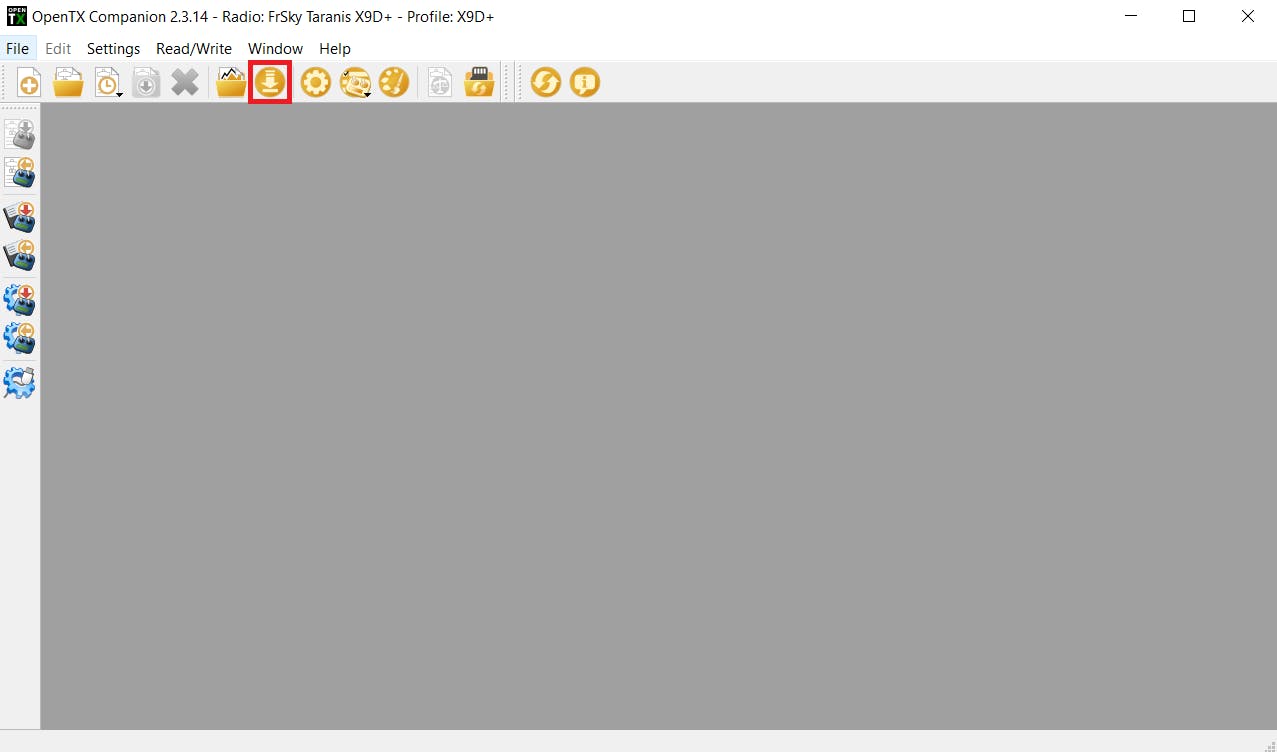
打開(kāi)已安裝的 OpenTX Companion,然后單擊Settings頂行的按鈕:
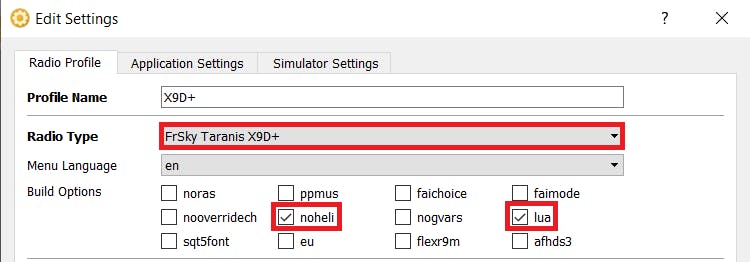
在Radio Profile選項(xiàng)卡上,選擇您的 Taranis 模型并選擇noheli和lua復(fù)選框。然后選擇Ok按鈕以保存您的更改:
接下來(lái),單擊Downloads按鈕:
在彈出的窗口中,單擊Download firmware按鈕并保存 .bin 文件:
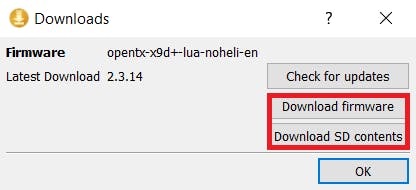
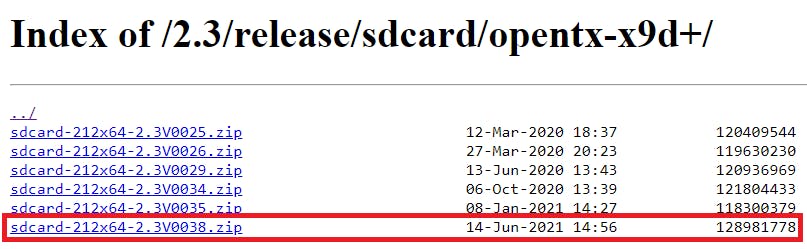
接下來(lái),單擊Download SD contents將打開(kāi)一個(gè)網(wǎng)站的按鈕,您可以在其中下載您需要復(fù)制到收音機(jī)中的 SD 卡的 SD 卡內(nèi)容。確保下載最新版本:
現(xiàn)在,首先備份計(jì)算機(jī)上的 SD 卡文件,然后刪除其中的所有內(nèi)容,并將新的 SD 卡文件復(fù)制到其中。然后從 、 和 文件夾中復(fù)制您之前擁有的任何自IMAGES定義SOUNDS文件MODELS 。
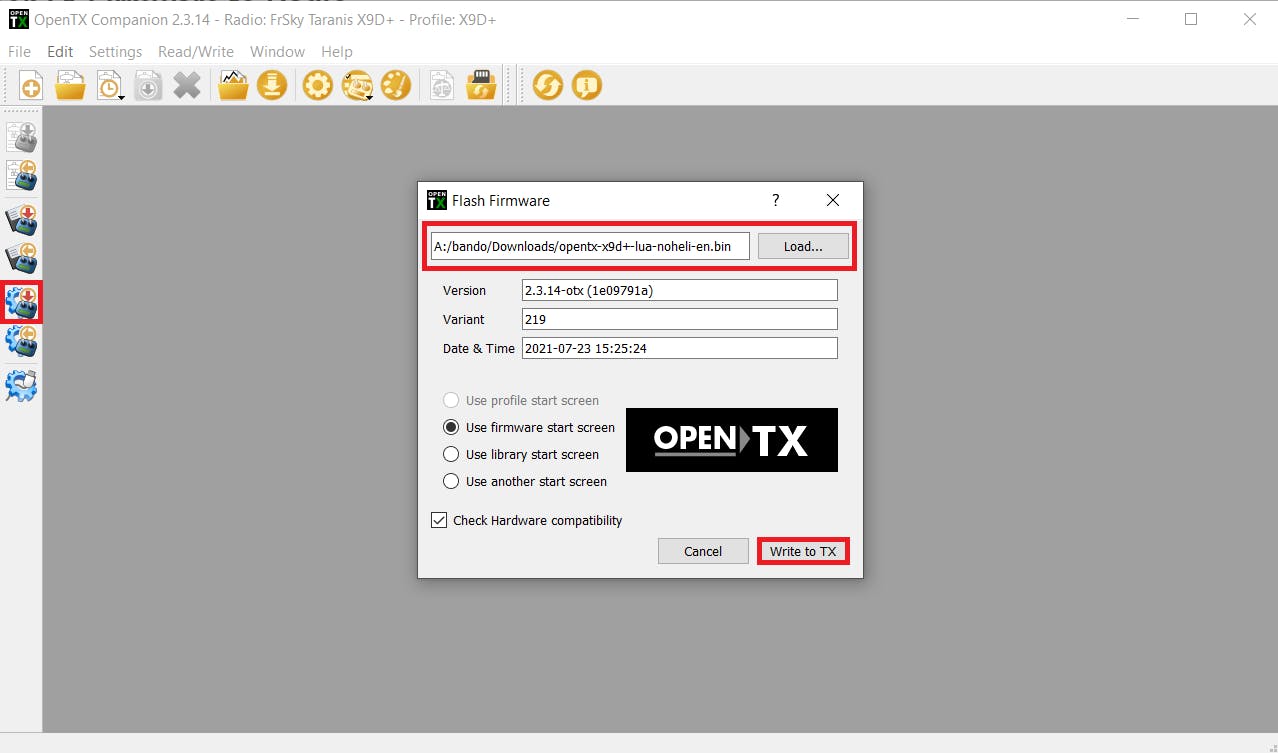
最后,我們可以將新固件刷寫(xiě)到收音機(jī)上。單擊Write Firmware To Radio左側(cè)菜單上的按鈕并加載您之前保存的固件文件。然后,單擊Write to TX按鈕使收音機(jī)閃爍:
刷新收音機(jī)后,將此文件夾中的內(nèi)容復(fù)制到收音機(jī) SD 卡中。
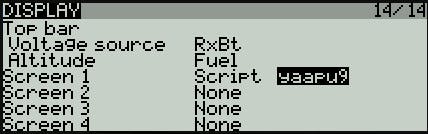
打開(kāi)你的收音機(jī)并導(dǎo)航到頁(yè)面Display并分配類(lèi)型:yaapu9Screen 1Script
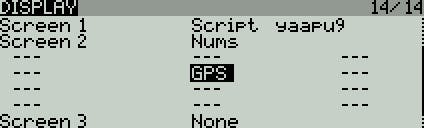
您還可以創(chuàng)建一個(gè)單獨(dú)的遙測(cè)頁(yè)面來(lái)顯示 GPS 坐標(biāo)。導(dǎo)航到Display頁(yè)面并將GPS遙測(cè)變量分配給Screen 2類(lèi)型Nums:
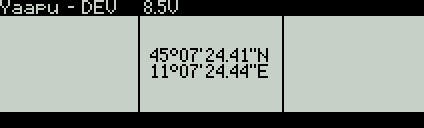
您的第二個(gè)遙測(cè)屏幕現(xiàn)在應(yīng)該如下所示:
第 8 步,最終設(shè)置:
在我們開(kāi)始駕駛這架直升機(jī)執(zhí)行搜索和救援任務(wù)之前,我們需要運(yùn)行一些測(cè)試程序以確保所有部件都能正常工作。
首先,我們需要測(cè)試 RPI 和飛控之間的 MavLink 連接。
在 RPI 上,運(yùn)行connection_test.py程序:
$ cd SAR_Drone
$ python connection_test.py
您應(yīng)該得到類(lèi)似的響應(yīng):
Connecting to vehicle on: serial0
>>> APM:Copter V4.0 (d6053245)
>>> Frame: QUAD
>>> Calibrating barometer
>>> Initialising APM...
>>> barometer calibration complete
>>> GROUND START
Get some vehicle attribute values:
GPS: GPSInfo:fix=3,num_sat=10
Battery: Battery:voltage=16.787,current=0.0,level=100
Last Heartbeat: 0.713999986649
Is Armable?: True
System status: STANDBY
Mode: STABILIZE
Completed
現(xiàn)在我們可以確認(rèn) RPI 可以與 PixHawk 4 通信,我們現(xiàn)在可以測(cè)試 RPI 和 Coral TPU 是否正常工作。
在 RPI 上,運(yùn)行video_detect_test.py程序:
$ python video_detect_test.py \
--model mobilenet_ssd_v2/mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite \
--labels mobilenet_ssd_v2/coco_labels.txt
如果您連接了監(jiān)視器或使用VNC ,您將看到來(lái)自 RPI 攝像頭模塊的視頻源的彈出窗口。當(dāng)您走到鏡頭前時(shí),結(jié)果應(yīng)該類(lèi)似于演示中的視頻。
現(xiàn)在我們可以確認(rèn) RPI 和 Coral TPU 正在相應(yīng)地運(yùn)行,我們可以開(kāi)始駕駛無(wú)人機(jī)進(jìn)行一些試飛。我們的第一個(gè)試飛計(jì)劃將是takeoff_test.py。但首先,我們需要對(duì) RPI 進(jìn)行編程以在啟動(dòng)時(shí)運(yùn)行程序,因?yàn)槲覀儗⒉辉贀碛鞋F(xiàn)場(chǎng)的 SSH 控制權(quán)。
為此,我們需要 ~/.bashrc再次編輯文件:
$ sudo nano ~/.bashrc
導(dǎo)航到文件底部并添加以下行:
workon sar
python /home/pi/SAR_Drone/takeoff_test.py
現(xiàn)在,將您的無(wú)人機(jī)帶到現(xiàn)場(chǎng)并執(zhí)行適當(dāng)?shù)?/font>預(yù)裝安全檢查。準(zhǔn)備好布防后,將無(wú)人機(jī)切換到GUIDED模式。不久之后,無(wú)人機(jī)應(yīng)該武裝自己,起飛到 10m,懸停 10 秒,然后降落,然后解除武裝。
讓我們開(kāi)始使用該程序移動(dòng)無(wú)人機(jī)。square_movement_test.py
和以前一樣,編輯~/.bashrc文件:
$ sudo nano ~/.bashrc
導(dǎo)航到文件底部,刪除我們之前添加的內(nèi)容,并將其替換為以下行:
workon sar
python /home/pi/SAR_Drone/square_movement_test.py
現(xiàn)在,將您的無(wú)人機(jī)帶到現(xiàn)場(chǎng)并執(zhí)行適當(dāng)?shù)?/font>預(yù)裝安全檢查。準(zhǔn)備好布防后,將無(wú)人機(jī)切換到GUIDED模式。不久之后,無(wú)人機(jī)應(yīng)該武裝自己,起飛到 10m,然后繼續(xù)以大方形模式飛行,然后降落,并解除武裝。
我們現(xiàn)在可以測(cè)試無(wú)人機(jī)是否能夠使用該record_test.py程序記錄鏡頭、檢測(cè)人類(lèi)對(duì)象并同時(shí)飛行。
和以前一樣,編輯~/.bashrc文件:
$ sudo nano ~/.bashrc
導(dǎo)航到文件底部,刪除我們之前添加的內(nèi)容,并將其替換為以下行:
workon sar
python /home/pi/SAR_Drone/record_test.py \
--model /home/pi/SAR_Drone/mobilenet_ssd_v2/mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite \
--labels /home/pi/SAR_Drone/mobilenet_ssd_v2/coco_labels.txt
現(xiàn)在,將您的無(wú)人機(jī)帶到現(xiàn)場(chǎng)并執(zhí)行適當(dāng)?shù)?/font>預(yù)裝安全檢查。準(zhǔn)備好布防后,將無(wú)人機(jī)切換到GUIDED模式。不久之后,無(wú)人機(jī)應(yīng)該武裝自己,起飛到 6m,懸停并記錄攝像機(jī)鏡頭。確保站在無(wú)人機(jī)的攝像頭前,以便它可以檢測(cè)到人體主體。幾秒鐘后,您可以將飛行模式切換到RTL它,它會(huì)降落到它啟動(dòng)的地方。
在 RPI 上,您會(huì)注意到SAR_Drone存儲(chǔ)庫(kù)中有一個(gè)名為:output.mp4. 打開(kāi)它,你會(huì)注意到它的錄音。確保相機(jī)能夠在錄制中檢測(cè)到您。
如果無(wú)人機(jī)能夠通過(guò)所有這些測(cè)試,那么您最終可以將無(wú)人機(jī)投入使用。如果您有任何問(wèn)題,請(qǐng)隨時(shí)自行調(diào)試或在評(píng)論部分尋求幫助。
我們現(xiàn)在可以~/.bashrc最后一次編輯文件:
$ sudo nano ~/.bashrc
導(dǎo)航到文件底部,刪除我們之前添加的內(nèi)容,并將其替換為以下行:
workon sar
python /home/pi/SAR_Drone/main.py \
--model /home/pi/SAR_Drone/mobilenet_ssd_v2/mobilenet_ssd_v2_coco_quant_postprocess_edgetpu.tflite \
--labels /home/pi/SAR_Drone/mobilenet_ssd_v2/coco_labels.txt
現(xiàn)在,將您的無(wú)人機(jī)帶到現(xiàn)場(chǎng)并執(zhí)行適當(dāng)?shù)?/font>預(yù)裝安全檢查。準(zhǔn)備好布防后,將無(wú)人機(jī)切換到GUIDED模式。不久之后,無(wú)人機(jī)應(yīng)該武裝自己并開(kāi)始尋找失蹤人員。
- 無(wú)人機(jī)結(jié)構(gòu)與系統(tǒng) 8次下載
- DragonFly無(wú)人機(jī)原理圖免費(fèi)下載 26次下載
- 基于啟發(fā)式搜索算法的無(wú)人機(jī)航跡規(guī)劃 24次下載
- 一種通過(guò)軌跡和形態(tài)識(shí)別檢測(cè)無(wú)人機(jī)的方法 18次下載
- 小型電動(dòng)無(wú)人機(jī)的總體參數(shù)設(shè)計(jì)方法研究說(shuō)明 19次下載
- 無(wú)人機(jī)的飛行原理的簡(jiǎn)介和設(shè)計(jì)資料說(shuō)明 15次下載
- 警用無(wú)人機(jī)關(guān)鍵技術(shù)及發(fā)展趨勢(shì) 13次下載
- 如何使用云計(jì)算進(jìn)行無(wú)人機(jī)云操作系統(tǒng)的詳細(xì)資料說(shuō)明 8次下載
- 無(wú)人機(jī)和無(wú)人機(jī)控制方法及無(wú)人機(jī)遠(yuǎn)程操控系統(tǒng)方法說(shuō)明 69次下載
- 無(wú)人機(jī)中繼模塊和無(wú)人機(jī)圖傳控制系統(tǒng)介紹 60次下載
- 無(wú)人機(jī)柔性裝配工裝應(yīng)用 2次下載
- 基于無(wú)人機(jī)的分類(lèi) 20次下載
- 基于STM32的無(wú)人機(jī)姿態(tài)測(cè)量系統(tǒng)設(shè)計(jì) 44次下載
- ADI民用無(wú)人機(jī)解決方案 19次下載
- 小型無(wú)人機(jī)數(shù)據(jù)鏈與自主飛控系統(tǒng)設(shè)計(jì)
- 射頻識(shí)別技術(shù)助力無(wú)人機(jī)搜索救援更精準(zhǔn) 2154次閱讀
- 怎樣使無(wú)人機(jī)安全飛行?無(wú)人機(jī)飛行需要掌握什么安全知識(shí) 1.5w次閱讀
- 大疆無(wú)人機(jī)哪個(gè)型號(hào)好_各型號(hào)區(qū)別(航拍系列推薦) 14.3w次閱讀
- 新疆為什么禁飛無(wú)人機(jī)_新疆無(wú)人機(jī)禁飛區(qū)域 5.7w次閱讀
- 無(wú)人機(jī)的優(yōu)勢(shì)以及大數(shù)據(jù)環(huán)境下的無(wú)人機(jī)技術(shù)改革分析 8603次閱讀
- 水下無(wú)人機(jī)的用途和優(yōu)勢(shì)有哪些 9214次閱讀
- 水下無(wú)人機(jī)原理分析 1.3w次閱讀
- nixie微型無(wú)人機(jī)的功能介紹_nixie微型無(wú)人機(jī)多少錢(qián) 1.3w次閱讀
- 微型無(wú)人機(jī)發(fā)展前景_無(wú)人機(jī)發(fā)展趨勢(shì) 8416次閱讀
- 大疆做不做軍用無(wú)人機(jī) 2w次閱讀
- 中國(guó)有哪些軍用無(wú)人機(jī)_國(guó)內(nèi)軍用無(wú)人機(jī)排名 11.2w次閱讀
- 大疆無(wú)人機(jī)如何在禁飛區(qū)起飛 15.1w次閱讀
- 電動(dòng)無(wú)人機(jī)和油動(dòng)無(wú)人機(jī)性能的對(duì)比 2710次閱讀
- 這款防水無(wú)人機(jī)為何這么貴,技術(shù)難點(diǎn)在哪? 1814次閱讀
- 盤(pán)點(diǎn)那些驚爆眼球的無(wú)人機(jī)新品 1669次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊(cè)
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評(píng)估板參考手冊(cè)
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來(lái)的未來(lái)-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開(kāi)發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報(bào)告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊(cè)
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開(kāi)關(guān)電源設(shè)計(jì)實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊(cè)免費(fèi)下載(新編第二版pdf電子書(shū))
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動(dòng)電路設(shè)計(jì)》 溫德?tīng)栔?/a>
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會(huì)AVR單片機(jī)與C語(yǔ)言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論