 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
項目概述和目錄
顯示了用于電動推動 10 英尺皮劃艇的控制臺。控制臺包含一個能夠生成脈沖寬度調(diào)制 (PMW) 信號的 Arduino Uno 計算機。Cytron 驅(qū)動器是一塊 2 x 3 英寸的電路板,位于 Uno 旁邊,它解釋 PWM 信號并為拖釣船電機供電,就像它為機器人電機供電一樣。
在控制臺的一側(cè),庫存的 4 安培小時 (AH) 或 6 AH Ryobi 鋰電池組(用于為無繩工具供電)為拖釣船馬達(dá)提供操作電源。控制臺還提供了一個電壓表和一個電流表來監(jiān)控電池電量和流向電機的功率。電機的速度由具有 6 個正向和 3 個反向速度的旋轉(zhuǎn)開關(guān)控制。
Arduino Uno 對拖釣船電機的 PWM 控制有兩種使用方式,首先它將鋰離子電池組的 18 伏電源調(diào)整為電機的 12 伏額定電壓,其次它控制電機的速度。這是它擅長的地方:通過在電池電路中插入電阻器,小型拖釣電機以低于全速運行。這些電阻器將多余的電池電量轉(zhuǎn)化為熱量,這些熱量在水中消散并被浪費掉。在低速時,典型的拖釣電機的效率約為 25%。用于控制速度的 PWM 技術(shù)在所有速度下的效率為 98%。
使用電池組為電機供電的便利性最顯著的是其重量輕:一個 4 AH 電池組重 2 磅。很容易插入控制臺或充電器,大約 2 小時即可將電池充滿電。備用電池組便于攜帶,可延長巡航范圍。鋰電池在長時間保持充電和在任何速度下都能提供滿額定功率方面也非常出色。
該項目中使用的組件具有極高的價值。一艘 10 英尺長的皮劃艇大約需要 200 美元,拖釣船馬達(dá)大約需要 100 美元,兩個 4 AH 鋰電池組 100 美元,還有不到 100 美元的雜項電子設(shè)備和零件,這些電子設(shè)備和零件需要一個方便的自己動手組裝起來。
Arduino Uno 和 PWM 的組合及其簡單的編程具有許多應(yīng)用。雖然我的興趣主要在于劃船,但這種類型的電機控制也可以有效地用于為推車或電動踏板車提供動力。這些都是有趣的項目,它們提供了很好的學(xué)習(xí)體驗。
目錄_
以下是本文內(nèi)容的注釋列表。
1. 背景和介紹 - 項目是如何產(chǎn)生的
2. 項目概述 - 皮劃艇的修改和添加
3. 脈沖寬度調(diào)制 - 它是什么以及我們?yōu)槭裁葱枰?/font>
4. 控制箱 - 一個耦合到 Cytron 驅(qū)動器的 Arduino Uno 控制電機
五、控制箱接線
6. 軟件 - Uno 中使用的 Arduino“電動皮劃艇”草圖
7. 安裝組件 - 控制箱、轉(zhuǎn)向裝置和橫梁。
8. 測試 - 皮劃艇在水中的操作和結(jié)果總結(jié)
9. 運輸和啟動皮劃艇
電動皮劃艇
一、背景與簡介
為了讓自己的生活更輕松一些,我投資了 200 美元買了一艘“坐在”10 英尺的皮劃艇來代替我的“坐在”10 英尺的皮劃艇。在我年紀(jì)很大的時候,進(jìn)出“坐式”皮劃艇是一件很麻煩的事!如下圖所示,我添加了一對堅固的把手和一個自制的木桅桿和吊桿。由于船基本上是像板一樣建造的,我想我可以安裝一個小帆,用槳控制船的方向。那沒有用。然后我添加了一個加重的中心板,但它仍然不能令人滿意地航行。我決定下一步必須建造一個相當(dāng)大的方向舵。
當(dāng)我在權(quán)衡各種帆船的利弊時,我在我最喜歡的 Hingham 海灘度過了一天,這是波士頓港的一個小鎮(zhèn),其歷史可以追溯到 1636 年。退潮時海灘很泥濘,因此不是一個繁忙的地方. 該鎮(zhèn)在附近開設(shè)了一所帆船學(xué)校,他們在那里讓孩子們開始乘坐 Optimists (Opti) 8 英尺的小艇。它 35 平方英尺的帆和 7.5 英尺的桅桿似乎很適合我的新皮劃艇。
Opti 由美國人 Clark Mills 于 1947 年設(shè)計。他用兩張膠合板制造了最大的嬰兒車。它后來成為世界上最受歡迎的帆船之一。他將這些計劃捐贈給了樂觀主義者俱樂部。
回到我在海灘的一天,當(dāng)我步行去帆船學(xué)校了解孩子們?nèi)绾尾倏v他們的 Opti 時,我注意到?jīng)]有一點風(fēng)。我完全期望找到一群臉很長的孩子。相反,他們再高興不過了。有的孩子躺在船底,用手劃槳,有的孩子在用船上的排水管打水仗,有的孩子穿著衣服和運動鞋,很高興從碼頭跳入水中。我不禁想知道為什么成年人不能像孩子們那樣享受在水上度過的一天。我認(rèn)為,如果船的價格更合理(今天一條新的翻車魚售價 5000 美元)并且船易于運輸且易于安裝和下水,那么大人們可以。
在 Opti 帆船裝置的試水期間,我遇到了大風(fēng)天,兩次傾覆了皮劃艇。幸運的是,我離岸不遠(yuǎn),船在沒有進(jìn)水的情況下自行恢復(fù),但事件提醒我皮劃艇是一項危險的運動。在冒險走得太遠(yuǎn)之前,明智的做法是學(xué)會糾正船并練習(xí)回到船上,如有必要,在帆船學(xué)校上一堂課。那時已經(jīng)是賽季末了,所以我擱置了航行的想法,開始了我的新冬季項目“電動皮劃艇”。
皮劃艇的電力推進(jìn)
就像售價 200 美元的 10 英尺皮劃艇一樣,兩臺小型 Minn-Kota 和 Newport Vessels 12 伏拖釣電機每臺售價約 100 美元,在價值方面很難被擊敗。它們的重量不到 20 磅,并且輸出的功率足以復(fù)制槳手的速度。他們效率不高。我對這些電機進(jìn)行的測功機測試表明,它們在全功率時的效率約為 65%,正如我們將看到的,在低速時效率要低得多。對于像汽車電池一樣大的電池,效率低不是一個嚴(yán)重的問題,但對于皮劃艇來說,更小的電池和更好的效率是非常理想的特性。幸運的是,使用小型 Arduino Uno 微處理器(稍后將描述)的脈沖寬度調(diào)制 (PWM) 奇跡提供了非常有效的推進(jìn)力。
二十年前,我在電動船上做了很多工作,寫了幾本書。我最成功的船是“Sunny II”,這是一艘改裝的 19 英尺帆船(O'Day Rhodes 19 船體,配備高效的英國 Etek 發(fā)動機,如我的“我的電動船”一書中所述)。船在拖車上,因此可以在將船放入水中之前給電池充電。雖然它比卸下電池充電所需的工作少得多,而且比在船頂使用太陽能電池充電更可靠,但它仍然是我電動劃船體驗中最不滿意的部分。
多年來,人們通過使用鋰離子而不是鉛來提高電池容量和減輕電池重量。這些改進(jìn)將繼續(xù),因為電動汽車和無繩工具的市場不斷增長(Ryobi 現(xiàn)在擁有 150 多種不同的無繩工具)。Ryobi 18 伏、4 安時 (AH) 和 6 AH 電池組隨時可用。當(dāng)電機僅消耗 35 瓦時,使用 PWM 產(chǎn)生最低速度,連續(xù)運行時間是從一個 4 AH 電池組測量為 2 小時。當(dāng)然,隨著速度的增加,運行時間會減少。考慮到 2 小時的充電時間和在控制箱中插入新充電電池組的便利性,這是解決電池問題的絕佳解決方案。
擬議項目
我對“電動皮劃艇”項目的計劃是修改兩艘 10 英尺的皮劃艇,以便除了劃槳之外,還可以使用稍微改進(jìn)的 Minn-Kota 或 Newport Vessels 拖釣馬達(dá)來推動它們。Arduino Uno 微處理器中固有的 PWM 技術(shù)用于將電池組的 18 伏電壓降低到 12 伏,并控制電機的速度以實現(xiàn)最高效率。Ryobi 4 AH 電池組(例如無線工具中使用的電池組)用于電池供電。
二、項目概況
為了描述這個項目,我將使用紅色皮劃艇(“坐式”皮劃艇)的照片,因為我展示了珊瑚色的“坐式”皮劃艇作為帆船。我對兩艘皮劃艇進(jìn)行了相同的電氣修改。這樣做的原因是我想知道船體形狀是否會影響船的速度。兩艘船也可以使用兩個電機中的任何一個進(jìn)行操作。通過所有四種可能配置的水測試結(jié)果,我們應(yīng)該能夠了解每種船體形狀和每種電機的優(yōu)缺點。
安裝電機
從皮劃艇的后部開始,我們看到用于懸掛電機的迷你橫梁的位置距離船尾 2 英寸。過去,我為小馬達(dá)制作了一個支架,用于在獨木舟上使用。支架位于座椅附近,因此無需重新定位控制裝置或添加轉(zhuǎn)向裝置。它奏效了,但操控(尤其是轉(zhuǎn)彎)感覺很尷尬,我不想重復(fù)那些令人失望的結(jié)果。
在我遙遠(yuǎn)的過去,我還看到過龍蝦漁民使用的大型船,船內(nèi)裝有一個裝有舷外發(fā)動機的盒子。使用了電機控制,轉(zhuǎn)向是用舷外機完成的。所有這些都非常方便且易于實施。由于我已經(jīng)在珊瑚皮劃艇的中心板上切了一個洞,我推斷通過擴(kuò)大它,我可以將拖釣馬達(dá)安裝在劃槳手可以輕松觸及的地方。這個想法也沒有奏效,主要是因為電機安裝得太靠近船的中間,無法有效轉(zhuǎn)向。但是我的水下測試確實揭示了以下好消息,雖然沒有簡單的捷徑,但當(dāng)電機安裝在橫梁上時,控制和轉(zhuǎn)向都可以完美地工作。
轉(zhuǎn)向
轉(zhuǎn)向是通過一個樞軸上的杠桿完成的(在第 7 節(jié)中顯示組件的照片),在槳手容易夠到的地方。如上圖所示,它啟動添加到電機的轉(zhuǎn)向桿。1/4 英寸的線連接到轉(zhuǎn)向桿的末端,在船的每一側(cè)都看不見,并出現(xiàn)在馬達(dá)前方幾英尺處以連接到轉(zhuǎn)向桿。線條需要質(zhì)量好、平滑且不拉伸。在船的前面,它繞過一個小滑輪,其余部分通過 6 個吊環(huán)螺栓引導(dǎo)。
控制箱
關(guān)于控制箱會說更多。通常,它必須位于操作員可觸及的地方。作為保持其干燥的第一道防線,它安裝在一個 3 英寸高的吊艙上。它裝有 Uno 微處理器和 Cytron 驅(qū)動程序。兩條電源線(至少#14 規(guī)格)從控制箱連接到電機到橫梁。
上述添加和修改不會妨礙帶槳的皮劃艇的操作。當(dāng)然,控制箱應(yīng)盡可能保持干燥。一個簡單的解決方案是用大約 1 1/2 加侖大小的塑料袋蓋住它,底部用拉繩固定它。控制箱和轉(zhuǎn)向手柄的照片在第 7 節(jié)中顯示和描述
3.脈沖寬度調(diào)制
為了利用 Minn-Kota 和 Newport Vessel 拖釣船馬達(dá)固有的巨大價值,必須提供 12 伏電源。但是我們的鋰離子電池組本身比鉛酸電池有很多優(yōu)勢,可產(chǎn)生 18 伏的電壓。使用脈沖寬度調(diào)制 (PWM),18 伏電源可以輕松有效地降低到 12 伏。
PWM 的另一個同樣重要的工作是提供 6 個前進(jìn)速度和 3 個倒退速度。在這種情況下,PWM 技術(shù)將顯著提高這些電機在低速時的效率。
讓我們來探討一下這些電機的速度控制是如何正常工作的。兩個電阻器連接到一個復(fù)雜(而且不是很可靠)的開關(guān),以提供 5 個正向和 3 個反向速度。這些電阻器位于電機前部的水中,用于散發(fā)它們產(chǎn)生的熱量。對于最慢的速度,兩個電阻串聯(lián)并散發(fā)最多的熱量,從而為電機提供最低的電池電壓。假設(shè) 4 伏電壓進(jìn)入電機而 8 伏電壓被浪費在熱量上(效率為 33%),那么電機的全速 65% 效率現(xiàn)在將進(jìn)一步降低到 25% 以下。另一方面,PWM 以 98% 的效率運行。我們可以對這個效率數(shù)據(jù)充滿信心,因為產(chǎn)生 PWM 輸出功率的 Cytron 通風(fēng) Mosfet 驅(qū)動器不會變得過熱。
Arduino Uno 和 Cytron 驅(qū)動程序
Cytron 驅(qū)動器(20 美元)在 30 伏特下額定電流為 20 安培,旨在以各種速度在正向和反向運行機器人電機。它專門設(shè)計用于解釋來自 Arduino Uno(10 美元)等設(shè)備的 PWM 信號(0 到 +5 伏),以驅(qū)動拖釣電機等永磁電機。在我們的項目中,使用 Cytron 和 Uno,我們可以非常有效地降低電池電壓并在正向和反向提供 9 個電機速度。這是天作之合!
脈沖寬度調(diào)制
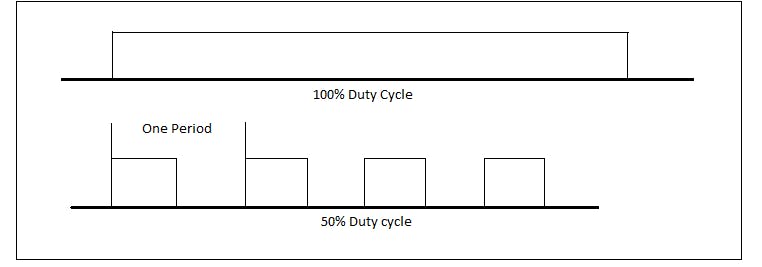
讓我們探討一下 PWM 技術(shù)的工作原理。上圖顯示了控制電機的開關(guān)方法在頂部(100% 占空比)和 PWM 方法在底部(50% 占空比)。第一行簡單地顯示了一個開關(guān)打開和關(guān)閉電機電源。例如,如果一個 12 伏的電池與一個開關(guān)串聯(lián),并且當(dāng)開關(guān)打開時流過 15 安培的電流,那么電機將在 100% 的時間內(nèi)消耗 180 瓦的功率。
歸根結(jié)底,在設(shè)置為 50% 占空比的 PWM 控制下,電機在一半時間內(nèi)接收 15 安培電流,因為脈沖寬度設(shè)置為 50%。它將消耗 90 瓦并產(chǎn)生一半的功率。使用 Arduino Uno,占空比由軟件提供的 0 到 255 之間的數(shù)字確定。50% 占空比的數(shù)字是 127(255 的 50%)。
如果這個馬達(dá)是拖釣馬達(dá),它會以降低的速度推動船。這種降低的速度相當(dāng)于將備用電機的速度控制手柄設(shè)置為五個前進(jìn)速度的中間時獲得的速度。在該設(shè)置下,插入電路中的串聯(lián)電阻將導(dǎo)致電機接收 6 伏而不是 12 伏。
正如我們之前所討論的,兩種技術(shù)在效率上存在很大差異:使用 PWM 時,電池的耗電量為 90 瓦,而使用電阻法時,電池的耗電量約為 150 瓦。60 瓦通過電阻器轉(zhuǎn)換為熱量并浪費掉。
?
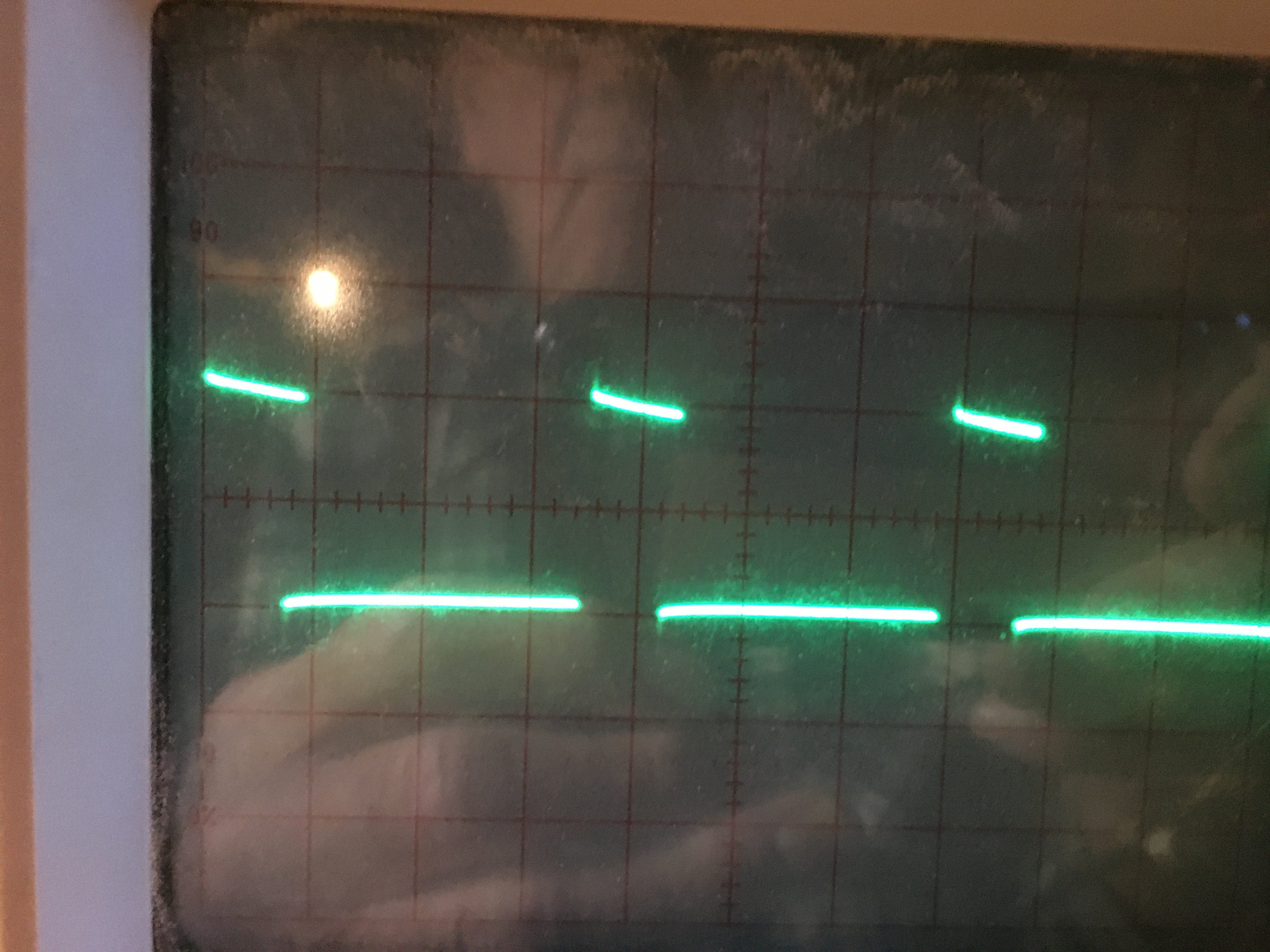
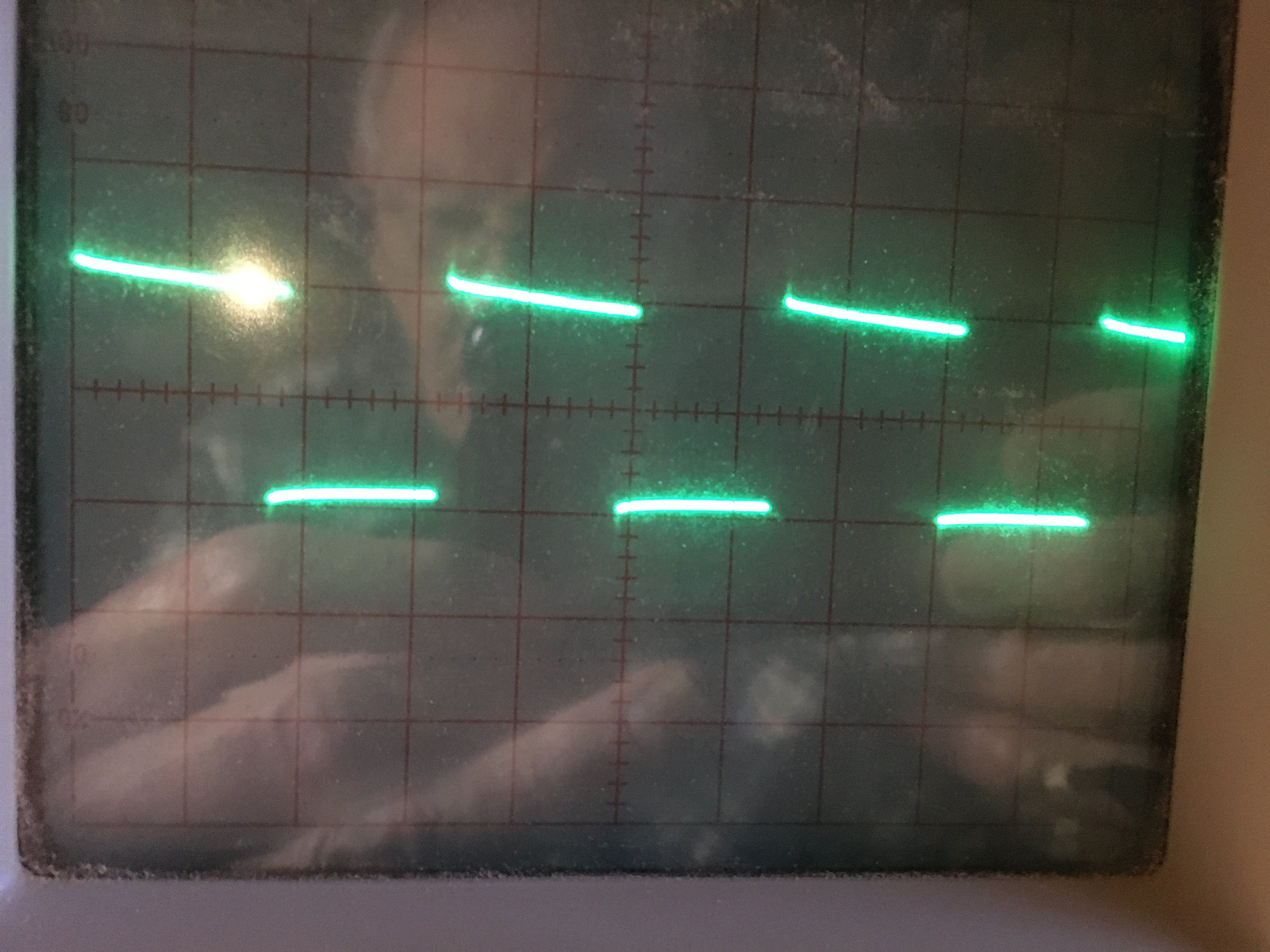
脈沖寬度調(diào)制測試
示波器連接到 Cytron 驅(qū)動器的輸出,該驅(qū)動器連接到拖釣電機之一。驅(qū)動器在 PWM 控制下產(chǎn)生的波形圖像如上圖所示。第一張圖顯示了大約 50% 占空比的輸出,PWM = 120。它與上圖非常相關(guān)。第二張圖顯示了最慢速度 (PWM = 60) 的輸出。它對應(yīng)于電機手柄上的最慢設(shè)置。在這種低速設(shè)置下,電機在桶裝水測試中消耗了大約 45 瓦。
在 PWM 控制下驅(qū)動電機
使用 Cytron 驅(qū)動器和 Arduino Uno 計算機連接電機是一項簡單的工作。Uno 和 Cytron 之間只需要 3 根控制線,其中一根是 PWM 信號。
為這個任務(wù)對 Uno 進(jìn)行編程同樣容易。稍后我們將詳細(xì)介紹編寫草圖,但在這一點上,讓我們考慮為 Cytron 驅(qū)動器的 PWM 端子生成適當(dāng)信號的任務(wù)。
我們計算電動皮劃艇的占空比如下。首先,計算全速占空比數(shù)。由于我們的電源組電壓產(chǎn)生的電壓略高于 18 伏,因此在相當(dāng)于 12 伏的電壓下運行電機應(yīng)該是 255 的 2/3。現(xiàn)在,我們將使用數(shù)字 160。為了獲得從全速到最小速度的范圍,我們將在 20 個點的步驟中將該數(shù)字從 160 減少到 60(值 160、140、120、100、80 和 60)為了提供 6 個前進(jìn)速度。這是選擇 PWM 編號值的良好起點。根據(jù)皮劃艇的類型、水測試結(jié)果和所需性能,最高速度和中間速度可通過使用 0 到 255 之間的 PWM 值完全調(diào)節(jié)。
這就是生成 PWM 信號的全部內(nèi)容。上面顯示的示波器圖像產(chǎn)生了預(yù)期的結(jié)果。用于頂部照片的 PWM 編號為 120,用于底部照片的編號為 60。在我們處理軟件之前,我們的 PWM 討論結(jié)束。
4. 控制箱
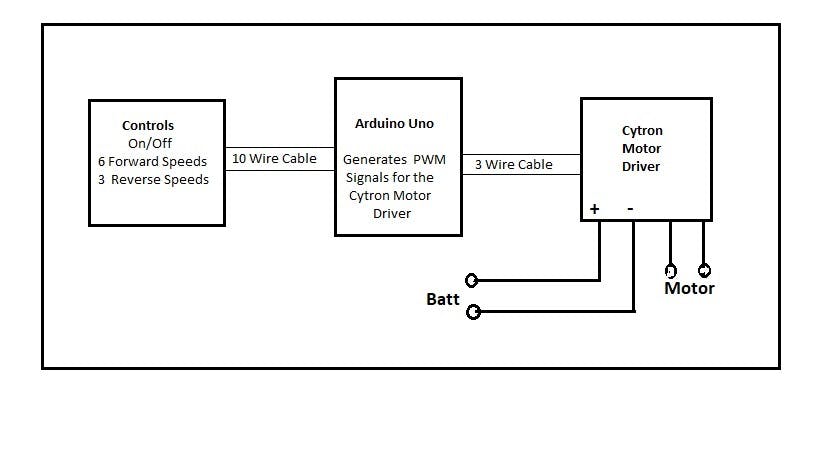
控制箱內(nèi)裝有 Arduino Uno 和 Cytron 驅(qū)動單元。每個都是一塊大約 2 x 3 英寸和大約 1 英寸厚的小型電子板。上面的框圖顯示了與速度控制開關(guān)(10 線電纜)的電子連接以及兩個板之間的 3 根線(PWM、方向和接地)。Cytron 驅(qū)動器的粗線顯示了到電池的兩個連接(一定要注意正確的極性!)和到電機的兩個連接(旋轉(zhuǎn)方向由連接的極性決定)。
電源連接均由#14 編織線制成。連接器是卷曲的藍(lán)色鏟形接線片。要連接儀表,請使用 #22 編織線。在有利的地方(從電池輸出和分流器),這些較小的電線可以與藍(lán)色連接器中的 #14 電線一起壓接。在 #22 線的另一端,使用小的紅色連接器。
控制箱的構(gòu)造
定制的控制箱(大部分)由 ? 英寸膠合板粘合在一起制成。背面和底部面板被擰上,以便接觸電子設(shè)備和安裝螺釘。下圖顯示了面板的尺寸。
基本的設(shè)計標(biāo)準(zhǔn)是使盒子盡可能窄,以便為槳手的腿留出盡可能多的空間。我已經(jīng)建造了四個這樣的盒子,我可以肯定地說,如果不對米做點什么,它們的寬度就不能超過 5.5 英寸。例如,我們可以通過使用每個電池組不可或缺的 4 個指示燈(通過將電池組倒置)來放棄使用電壓表,或者我們可以使用更小的儀表。然后控制箱會窄約一英寸。
兩側(cè)面板
除了電池組插入盒子的右側(cè)之外,構(gòu)建木盒很簡單。為了給電池組提供堅實的支持,我在盒子的右側(cè)使用了一塊 6 x 6 的 1 英寸橡木(? 英寸厚)。下面的草圖顯示了右側(cè)面板的整體尺寸和安裝電池組的詳細(xì)尺寸。由 ? 英寸膠合板制成的左側(cè)面板具有相同的整體尺寸。該面板只需要在距前緣約 1.5 英寸、距底部約 1 英寸處鉆一個 1 英寸的孔,即可接入 Uno 的 USB 連接器。
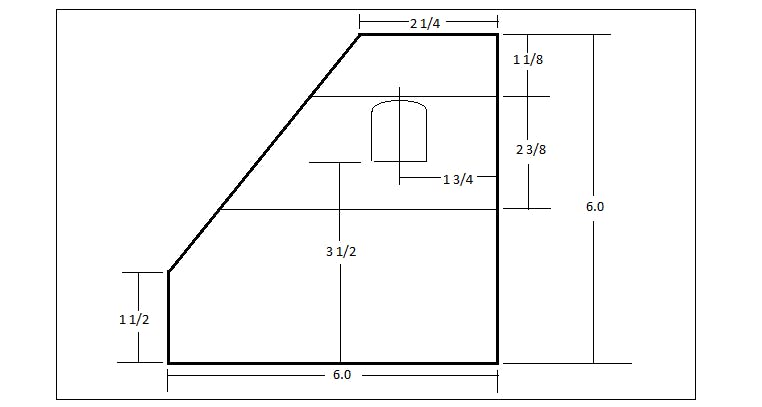
面板的 2 3/8 部分凹陷 1/4 英寸,以容納電池組突出的平坦部分。距右側(cè)邊緣 1? 英寸的切口可容納電池組觸點的突出部分。彈簧導(dǎo)體(約 3/16 英寸寬)安裝在切口的每一側(cè),以將電流從電池傳輸?shù)?Cytron 驅(qū)動器。電池用 1/4 英寸和 1 1/16 英寸的有機玻璃板鎖定在適當(dāng)?shù)奈恢茫@些有機玻璃板以 2 ? 英寸的間距小心安裝。
許多插槽必須與電池組的突起對齊。使用其中一種 Ryobi 便攜式工具作為指南。控制箱的圖片也可能有助于解開鎖定機構(gòu)的奧秘。這和觸點的安裝是控制箱結(jié)構(gòu)中唯一困難的部分。
還有一個細(xì)節(jié)。左側(cè)面板有木制 ? x ? 加固木片,粘在面板的背面和底部邊緣。這是用 ? 英寸 #6 螺釘連接后面板和底板的位置。
其他 5 個面板
其他 5 個面板在所有情況下都與側(cè)面板重疊。因此,它們比它們所連接的側(cè)板的尺寸長 1/4 到 1/2 英寸或?qū)挕?/font>將提供面板的尺寸,但由于它們只是 ? 膠合板的矩形件,因此僅提供前面板的圖紙。
頂板:2 ? 英寸 x 5 ? 英寸寬
前面板: 6 英寸(根據(jù)需要修剪以確保良好貼合)x 5 ? 英寸寬
底部前面板:1 ? x 5 ? 英寸寬
后面板:6 ? 英寸 x 5 ? 英寸寬
底板:5 ? x 5 ? 英寸寬
前面板安裝的角度是指前面板和頂部的90度直角必須分成4個方向。大致角度如下:頂面板和前面板之間的角度約為 55 度(每個面板的邊緣為 28 度)。底板和前面板之間的角度約為 35 度(每個面板的邊緣為 17 度)
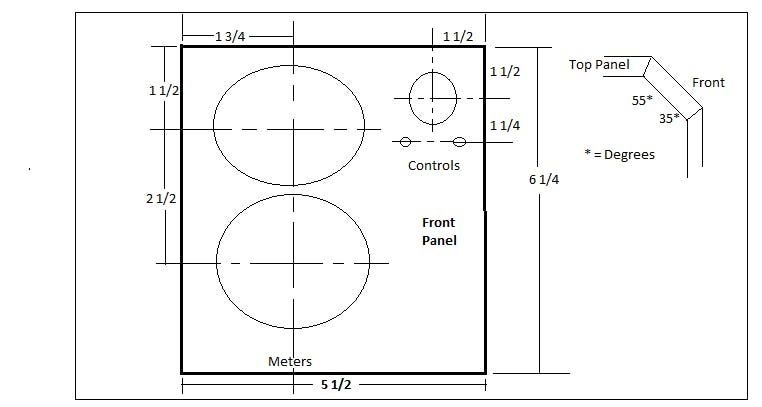
上面顯示了前面板的草圖。它顯示了組件和控件的建議位置。3 個前面板的邊緣視圖也顯示了上面討論的角度。控制箱組件包括:一個 20 安培的電流表,在頂部面板下方安裝了一個分流器,以及一個 30 伏的電壓表。提供6個前進(jìn)速度和3個后退速度的速度控制開關(guān)和帶指示燈的開/關(guān)開關(guān)也安裝在這個面板上。(這些儀表可在亞馬遜購買,總價約為 20 美元)。
兩塊電路板(Cytron 和 Uno)盡可能向前地安裝在儀表下方的底板上。Uno 最靠近 USB 電纜的 1 英寸檢修孔所在的左側(cè)
5.控制箱接線
控制箱的接線用兩張圖表示。第一張圖是電源接線圖,即從電池組到 Cytron 驅(qū)動板再到電機的接線圖。第二張圖(電子線路)顯示了控件如何連接到 Arduino Uno 微處理器和 Cytron 驅(qū)動程序。正如接線圖所示,這兩個非常基本且易于實現(xiàn)。
功率圖
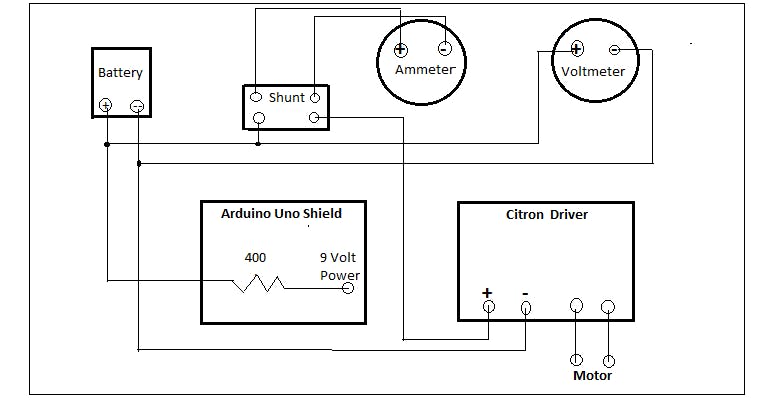
從電池組的 + 端子開始,接線圖顯示了到該端子的 3 個連接:a) 400 歐姆,? 瓦電阻,b) 電流表分流器和 c) 電壓表的 + 端子。a) 電阻連接在插入 Arduino Uno 的屏蔽板上進(jìn)行。其目的是為 Uno 提供電力。這模擬了 9 伏電池的使用。該電阻器用于將 18 伏電池電壓降低到 12 伏以下,以符合 Uno 規(guī)范。它被焊接到 9 伏電池連接器的 + 上。
b) 連接到與電流表一起提供的分流裝置的一側(cè)。分流器只是一個校準(zhǔn)電阻器,它與電流表的機制相匹配(實際上是一個 75 毫伏電壓表)。另一個分流連接到 Cytron 驅(qū)動器的 +。Cytron 驅(qū)動器沒有防止不正確的極性連接,因此觀察電源的極性很重要。請注意,電機沒有極性標(biāo)記。原因是當(dāng)電線反向時,電機只是以相反的方向運行。兩根電線(22 號)從分流器連接到電流表。
c) 連接從電池 + 到電壓表的 +。另一根 22 號線從電池的負(fù)極連接到電壓表的負(fù)極。我們之前提到過,22 號線可以與藍(lán)色端子中的 14 號線一起壓接。在最后三個連接中,一個從電池連接到 Cytron,最后兩個從 Cytron 板連接到拖釣船電機。
這些說明適用于兩種拖釣船馬達(dá):
卸下固定蓋子的 6 顆螺釘。請注意,有 4 根電線沿著軸連接到電機:2 根大線,紅色 (+) 和黑色(它們連接到電機端子)和 2 根較小的線,白色和黃色(它們連接到電阻器)。使用 PWM 控制時不需要黑色速度控制開關(guān)和電阻器,將按如下方式繞過 - 將紅線和黑線剪離控制開關(guān)約 2 英寸。使用對接連接器將大約 18 英寸的電線(電池線可用于此目的)添加到電機的紅線和黑線。您需要足夠的電線才能到達(dá)迷你橫梁上的端子。白線和黃線可以保持原樣連接。使用 4 個對接連接器,2 個用于電機線,2 個用于電池線,可以將接線恢復(fù)到其原始配置。
電子圖
我們在上圖中提到了“盾牌”這個詞。許多 Arduino 計算機(例如 Uno)可以容納一個屏蔽,該屏蔽插入帶有預(yù)置電路的處理器板,用于特殊目的,例如連接到 Internet。也可以購買原型屏蔽(3 美元)來實現(xiàn)定制電路。它看起來像一個帶有幾個連接器的裸面包板,通常是一個復(fù)位開關(guān)。我們使用這些原型屏蔽之一來方便地安裝我們需要的電阻器。
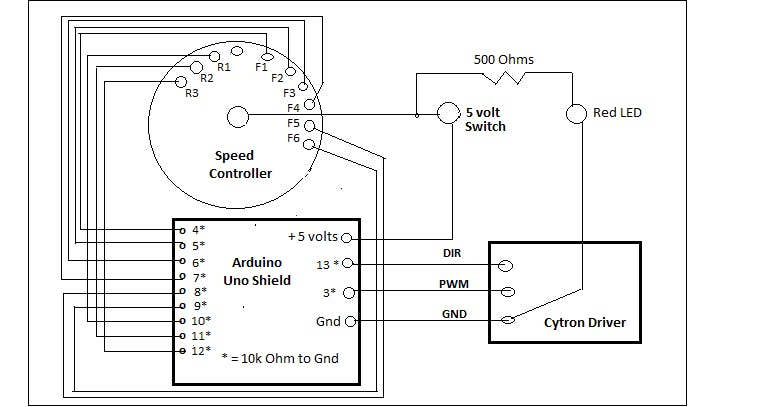
控制箱中的電子連接顯示了速度控制器、5 伏開關(guān)、Uno 屏蔽和 Cytron 驅(qū)動器之間的互連。
速度控制器是一個 12 位旋轉(zhuǎn)開關(guān)。中心位置為“關(guān)”。順時針轉(zhuǎn)動撥盤,一次選擇一個速度 F1 到 F6。F1 是最慢的前進(jìn)速度,F(xiàn)6 是全速前進(jìn)。When a speed is selected the 5 volts from the center position is connected to the selected pin. 當(dāng)表盤逆時針旋轉(zhuǎn)時,一次選擇一個反向速度 R1 到 R3。如果旋轉(zhuǎn)開關(guān)有擋塊,請小心選擇“關(guān)閉”位置,以確保擋塊不會干擾 6 個正向或 3 個反向速度的順序。
如果您能找到一小段顏色編碼的 9 芯 #26(或接近該尺寸)絞合線,那就太好了。如果不是,則制作三根 3 線電纜,分別標(biāo)識每一端 如圖所示,引腳 F1、F2 和 F3 連接到端口 4*、5* 和 6*。引腳 F4、F5 和 F6 連接到端口 7*、8* 和 9*。反向引腳 R1、R2 和 R3 連接到端口 10*、11* 和 12*。
星號表示 10、000 ohm、1/4 瓦電阻連接到 11 個端口中的每一個。這種接地是必要的,這樣 Uno 端口就不會“浮動”,這是一種既不是 1 也不是 0 的不穩(wěn)定狀態(tài)。所有的屏蔽都不一樣,但我碰巧買的那個有一個接地條(和一個+5 條)可以焊接 11 個電阻的一端。我小心地從屏蔽連接器上滑下塑料外殼,露出內(nèi)部引腳,然后小心地將電阻器的一端焊接到它上面。然后我還將速度控制器的電線焊接到電阻器上。
Cytron 驅(qū)動器與端口 3*、13* 和 Gnd 之間的連接需要另一條 3 線電纜。#23 和#26 之間的任何絞合線都可以使用。對于使用螺釘連接器的 Cytron 板上的連接,請將電線鍍錫,以便在擰緊螺釘時不會散開。
電子接線的最后一點是與開/關(guān)開關(guān)和 LED 指示燈的 5 伏連接。上面使用的相同絞合線適用于這些連接。+5v 從 Uno 屏蔽層連接到開關(guān)的一側(cè),開關(guān)的另一側(cè)連接到速度控制器的公共端和 500 歐姆 LED 限流電阻。電阻的另一端連接到 LED 的 + 側(cè)(必須觀察 LED 的極性)。LED 的另一條腿連接到 Gnd。
控制箱的電源接線和電子接線到此結(jié)束
6. 軟件 - Arduino Sketch
選擇 Arduino Uno 來控制 Cytron 驅(qū)動程序是因為它體積小但功能強大,足以執(zhí)行所需的任務(wù)。主要要求是為 6 個正向和 3 個反向速度提供足夠的端口或通道。它還必須能夠生成 PWM 信號以將 18 伏電池組電壓降低到 12 伏。
能夠完成這項工作的程序(在 Arduino 演講中稱為“草圖”)編寫在 PC 上,并通過 PC 的 USB 連接器上傳到 Uno 板。在上傳草圖之前,它會通過內(nèi)置編譯器進(jìn)行驗證和編譯。“電動皮劃艇”草圖是為您編寫的,因此只需在您的 PC 上鍵入幾頁代碼即可。
要將 Arduino 草圖從您的 PC 寫入并上傳到 Uno,您必須首先將 Arduino IDE(集成開發(fā)環(huán)境)綜合軟件程序加載到您的 PC 中。在它的眾多功能中,一個草圖庫、一個用于輸入新草圖的編輯器(類似于 Open Office 的編輯器)、一個還可以驗證草圖的編譯器以及將草圖上傳到諸如 UNO 之類的計算機板所需的軟件。要下載最新版本的 IDE,請訪問 Arduino.com 站點。IDE 是一個完全免費的“開源”程序。
您需要按照安裝說明選擇 USB 驅(qū)動程序。您還必須提供板的名稱 (Uno) 和端口的 COM 號(通常為 3)。當(dāng)您到達(dá)這一點時,從 Arduino 庫(文件/示例/基礎(chǔ)/閃爍)中選擇一個草圖,例如“閃爍”,并確保您可以上傳并運行它。
您現(xiàn)在可以復(fù)制草圖“電動皮劃艇”并將其上傳到 Uno,Uno 將使用 Cytron 驅(qū)動程序來操作拖釣船馬達(dá)。一旦將草圖加載到 Uno 中,就可以反復(fù)使用它。斷開 Uno 板的電源不會影響存儲的程序。
素描“電動皮劃艇”
如果這是您第一次使用 USB 電纜為 Uno 板供電,您將立即看到板上的 LED 閃爍。這告訴您,板子出廠時已經(jīng)加載了一個草圖。閃爍的 LED 是傳統(tǒng)的“Hello World”符號,用于介紹新程序。
通過將草圖“Blink”上傳到板上來測試上述安裝。此時一個很好的簡短練習(xí)是將延遲(在“閃爍”中)從 1000(1 秒)修改為 200(1/5 秒)。上傳修改后的“閃爍”后,您會看到一個非常快速閃爍的 LED。本練習(xí)展示了更改草圖中的參數(shù)是多么容易。
接下來的工作是將下面顯示的草圖復(fù)制到 Arduino IDE 的程序列表中。程序如下。
打開 IDE
在“新建”下,您將找到以下基本草圖,它顯示了草圖的兩個基本部分:“設(shè)置”(僅運行一次)和反復(fù)運行的“循環(huán)”。當(dāng)草圖中有數(shù)字(整數(shù))時,需要在設(shè)置部分之前定義它們。
在草圖“電動皮劃艇”中,我們將有與端口對應(yīng)的數(shù)字(整數(shù))。它們的定義如下例所示:“int KAYAK_PWM= 3;”。這意味著端口 3 將產(chǎn)生 PWM 輸出。
在設(shè)置部分,我們還將顯示端口是用作輸入端口還是輸出端口。例如:“pinMode(3, OUTPUT);”
在循環(huán)部分,示例顯示我們將根據(jù)選擇的速度和旋轉(zhuǎn)方向驅(qū)動電機:“analogWrite(KAYAK_PMW, 100*val);”
一個基本的骨架草圖如下所示:
無效設(shè)置(){
// 把你的設(shè)置代碼放在這里,運行一次:
}
無效循環(huán)(){
// 把你的主要代碼放在這里,重復(fù)運行:
}
請注意標(biāo)點、大寫字母、空格、下劃線和括號都必須符合 C++ 規(guī)則。編譯器將拾取任何錯誤,并且進(jìn)度將停止,直到錯誤得到糾正。很容易出現(xiàn)標(biāo)點錯誤或省略標(biāo)點符號。小心輸入草圖!盡可能使用“復(fù)制”和“粘貼”編輯功能來復(fù)制通過編譯測試的代碼。
電動皮劃艇草圖如下。雙斜杠 (//) 告訴編譯器忽略該行上的其余解釋性信息。(如果您需要對編譯器發(fā)現(xiàn)的錯誤進(jìn)行故障排除,它也會派上用場)。
// 把你的設(shè)置代碼放在這里,運行一次:
int KAYAK_PWM = 3;
詮釋 KAYAK_F1 = 4;
詮釋 KAYAK_F2 = 5;
詮釋 KAYAK_F3 = 6;
詮釋 KAYAK_F4 = 7;
詮釋 KAYAK_F5 = 8;
詮釋 KAYAK_F6 = 9;
詮釋 KAYAK_R1 = 10;
詮釋 KAYAK_R2 = 11;
詮釋 KAYAK_R3 = 12;
詮釋 KAYAK_DIR = 13;
整數(shù)值 = 0;
無效設(shè)置()
{
pinMode(3,輸出);
pinMode(4,輸入);
pinMode(5,輸入);
pinMode(6,輸入);
pinMode(7,輸入);
pinMode(8,輸入);
pinMode(9,輸入);
pinMode(10,輸入);
pinMode(11,輸入);
pinMode(12,輸入);
pinMode(13,輸出);
}
無效循環(huán)(){
// 把你的主要代碼放在這里,重復(fù)運行:
val=digitalRead(KAYAK_F1);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,val);
模擬寫入(KAYAK_PWM,60*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_F2);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,val);
模擬寫入(KAYAK_PWM,80*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_F3);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,val);
模擬寫入(KAYAK_PWM,100*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_F4);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,val);
模擬寫入(KAYAK_PWM,120*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_F5);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,val);
模擬寫入(KAYAK_PWM,140*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_F6);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,val);
模擬寫入(KAYAK_PWM,160*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_R1);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,低);
模擬寫入(KAYAK_PWM,60*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_R2);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,低);
模擬寫入(KAYAK_PWM,80*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
val=digitalRead(KAYAK_R3);
如果(val == 1){
數(shù)字寫入(KAYAK_DIR,低);
模擬寫入(KAYAK_PWM,120*val);
延遲(1000);
數(shù)字寫入(KAYAK_DIR,低);
數(shù)字寫入(KAYAK_PWM,低);}
//延遲(2000);
}
在輸入草圖并檢查它是否編譯后,使用“另存為”(在“文件”下)以您選擇的文件名保存它。要檢索草圖,最簡單的方法是使用位于所有草圖頂部的向上箭頭。
“電動皮劃艇”代碼的操作。
設(shè)置代碼顯示我們有 2 個輸出端口(端口 3 和 13)。端口 3 為 PWM 端口,用于輸出 PWM 信號給 Cytron 驅(qū)動器。端口 13 用于向 Cytron 驅(qū)動器輸出電機方向信號。六速正向運行,三速反向運行電機。端口 4 到 9 是正向速度,而端口 10、11 和 12 是反向速度。“val”的二進(jìn)制值是一或零。當(dāng)旋轉(zhuǎn)速度控制開關(guān)選擇特定的速度程序時,它變?yōu)?1。
循環(huán)部分由 9 個類似的速度例程組成,用于 6 個前進(jìn)速度和 3 個倒退速度。根據(jù)速度控制開關(guān)的設(shè)置,每個速度都有自己的 PWM 編號和旋轉(zhuǎn)方向。例如,當(dāng)開關(guān)順時針轉(zhuǎn)動一個位置(從中心/關(guān)閉位置)時,電機將以最慢的速度(PWM 編號 60)在正向 (F1) 上運行。下一個順時針位置將導(dǎo)致第二個例程變?yōu)榛顒訝顟B(tài)。它將在前進(jìn)方向?qū)⑺俣仍黾拥?PWM 80。接下來的 4 個位置將在前進(jìn)方向上產(chǎn)生相同的效果。最后一個開關(guān)位置以 PWM 為 160 的最大速度運行電機。要激活 3 個反向程序,開關(guān)返回到中心/關(guān)閉并逆時針轉(zhuǎn)動。每一步都會以與正向增加速度相同的方式反向增加速度。反向例程是例程 7、8 和 9。
查看每個例程中的 7 行代碼,我們首先確定哪個例程處于活動狀態(tài)(如果有)。第一個速度程序是速度 F1(前進(jìn) 1)。第一行代碼決定了“val”的值。它可以是 1 或 0,如果選擇了它的開關(guān)位置,它只會是 1。中心/關(guān)閉將返回 0,任何其他速度也將返回 0,因為任何時候只能選擇一種速度。
如果 val 為 0,我們將繼續(xù)下一個速度例程。但是如果它是一個,意味著速度開關(guān)在這個觸點上有一個 +5 伏,我們將激活打開大括號(“{”)之后的接下來的 5 行代碼,直到我們到達(dá)一個閉合大括號(“} ”)。
這些代碼的第一行是“digitalWrite(KAYAK_DIR, val). 這意味著我們將使用 +5 伏激活端口 13,以使電機正向轉(zhuǎn)動。
第二行代碼是“analogWrite(KAYAK_PWM, 60* val). 這意味著我們將使用一個信號激活端口 3(一個 PWM 端口),該信號會導(dǎo)致 Cytron 驅(qū)動程序生成一個持續(xù)時間為 60/255 的脈沖。
第三行只是意味著我們在這些操作條件下暫停 1 秒鐘。
第四行代碼“digitalWrite(KAYAK_DIR, LOW)”關(guān)閉端口 13,第五行代碼“digitalWrite(KAYAK_PWM, LOW)”關(guān)閉端口 3。
我們現(xiàn)在轉(zhuǎn)到循環(huán)中的下一個速度例程。最可能的情況是速度開關(guān)沒有移動,因此,在檢查了其他 8 個可能的速度之后,我們在第一個速度例程中再次發(fā)現(xiàn) val = 1。這種情況將再次導(dǎo)致電機運行一秒鐘,然后再檢查開關(guān)位置是否發(fā)生變化。這可能會持續(xù)幾個小時。電機中沒有明顯的功率損耗,因為 Uno 速度如此之快,以至于繞循環(huán)一次(檢查其他 8 個速度例程)所需的時間不到 50 微秒,時間間隔太短以至于電機無法注意到。
最終,速度將被改變或速度開關(guān)將返回到中心/關(guān)閉位置。在這種情況下,val 在任何速度程序中都不會為“1”,并且電機將關(guān)閉。此時,可以關(guān)閉電子設(shè)備的電源,并且可以從控制箱中取出電池組。
軟件部分總結(jié)
在這個非常有趣的部分中,我們看到了大腦(Uno 計算機)如何使用 Cytron 驅(qū)動程序控制電池組肌肉,以正向和反向以各種速度運行拖釣電機。Electric Kayak 草圖是控制大腦運作的程序。我們首先設(shè)置所需的 11 個輸入和輸出端口。然后,使用 9 個類似的“速度程序”,我們以速度控制開關(guān)選擇的速度為拖釣船馬達(dá)通電。同時,電池組電壓從 18 伏降至 12 伏,以匹配拖釣船馬達(dá)的工作電壓。
7. 安裝組件
我們已經(jīng)看到,電動皮劃艇是一款 10 英尺長的皮劃艇,有 3 個主要附加功能:一個安裝電動拖釣電機的微型橫梁、一個轉(zhuǎn)向機構(gòu)和一個控制箱,該控制箱可以在兩個方向上以不同的速度運行電機和房屋電池組。在本節(jié)中,我們將用照片描述這些添加物,并展示它們是如何安裝在皮劃艇上的。
控制箱
下圖顯示了一個帶有電流表、電壓表和速度控制器的控制箱。在右側(cè),可以插入 Ryobi 4 或 6 安培小時電池組。在左側(cè)提供了一個 1 英寸的孔,以便可以將 USB 電纜從 PC 連接到控制箱。在盒子的后蓋上有 2 個端子,用于連接電機的兩條導(dǎo)線。

控制箱安裝在一個 3 英寸高的吊艙上,以避免它被我們通常在皮劃艇底部發(fā)現(xiàn)的水弄濕。吊艙底部的輪廓類似于皮劃艇的底部。它用兩個 1/4 英寸平頭不銹鋼螺釘擰到座椅前部前方約 12 英寸的底部,1? 英寸長。控制箱通過 3/16 英寸黃銅(或不銹鋼)螺釘 1? 長和 32 螺紋連接到吊艙。
我用膠合在一起的 2 塊 2 x 4 制作了豆莢。它的尺寸約為 3 x 3 英寸。3/16 英寸螺釘穿過吊艙頂部 1.5 英寸的一半。它們凹陷 3/4 英寸,因此它們突出 3/4 英寸。它們與位于 Cytron 板附近的控制箱中的孔相匹配,向前不要太遠(yuǎn),以便在卸下后蓋時可以用套筒扳手?jǐn)Q緊鎖緊螺母。
轉(zhuǎn)向機制
轉(zhuǎn)向機構(gòu)只是皮劃艇中間附近樞軸上的手臂。連接到手臂底部的是一根繩索,繞著船的兩側(cè),從電動機的控制臂伸出約 2 英尺。用轉(zhuǎn)向手柄拉動控制臂,進(jìn)而拉動電機控制臂的右側(cè)。它使船向右舷(右)方向轉(zhuǎn)動。下面是轉(zhuǎn)向機構(gòu)的圖片。轉(zhuǎn)向控制臂顯示在第 2 節(jié)中的電機圖片中。
轉(zhuǎn)向機構(gòu)的構(gòu)造很簡單。1/4 英寸厚的手臂由兩個 1/8 厚的鋁條制成,大約 1? 英寸寬(與手柄直徑相同)。兩個 1/8 英寸的部分分別長 9 英寸和 10 英寸。它們用 4 個平頭、不銹鋼、#8、? 英寸長的螺絲和鎖緊螺母用螺栓固定在一起,這樣桿的頂部彼此齊平。
樞軸孔是一個 3/8 英寸的孔,從最長桿的底部鉆出 5.5 英寸。它可容納一個 3/8 英寸的螺栓,該螺栓在 ? 英寸的距離內(nèi)沒有螺紋(以提供光滑的旋轉(zhuǎn)表面)。然后螺栓的螺紋部分將與鎖緊螺母的末端齊平。

樞軸的另一半將機制錨定到船的一側(cè)。它由一根 1.5 英寸寬、1/4 英寸厚的鋁條(或兩個 1/8 英寸厚的條)組成。它(用 2 個合適的螺釘)連接到一個同樣長 5 英寸、寬約 3 英寸、厚 2 英寸的木塊上。塊的背面必須與船側(cè)面的輪廓相匹配,并且其厚度必須允許樞軸臂穿過皮劃艇頂部的狹槽,如控制箱照片所示,并且手柄(上)。帶式砂光機可以很好地完成這種輪廓工作。
然后用兩個 3 英寸長的 ? 英寸不銹鋼螺釘和鎖緊螺母將轉(zhuǎn)向機構(gòu)和異形墊片連接到船上。這些螺栓穿過墊片和 ? 英寸樞軸桿,如上圖所示的樞軸臂。
唯一剩下的轉(zhuǎn)向部分是連接到轉(zhuǎn)向臂的手柄。與墊片一樣,它由經(jīng)過壓力處理的 2 x 4 透明截面制成。截面為八角形,直徑約為 1 1/4 英寸。首先切割 7 英寸長的 2 x 4 塊,然后將其制成 1? 英寸見方。然后,通過調(diào)整臺鋸上的柵欄和刀片的角度,很容易制作出具有專業(yè)外觀的八角形。在手柄的一端切出一個 1/4 英寸的槽,用于安裝轉(zhuǎn)向臂。用兩個 1 1/2 英寸 #6 螺釘和鎖緊螺母將臂鎖定到位。
迷你橫梁
將電動機安裝在皮劃艇上需要等效的橫梁。有足夠的空間容納 7 到 10 英寸寬的定制迷你橫梁(取決于皮劃艇的寬度),以容納至少需要 6 英寸寬的電機夾。橫梁的良好高度為 3 ? 至 4 英寸,良好的厚度為 2 1/2 英寸。可以按照以下方式從我們的壓力處理的 2 x 4 組裝一塊這種尺寸的木頭。2 層 2 x 4 和一層 1 x 4 粘合在一起以獲得必要的高度。然后修剪塊的末端以匹配皮劃艇側(cè)面的線條。在臺鋸上切割 2 ? 英寸的厚度。然后,塊的底部的輪廓與皮劃艇的頂部相匹配,如下圖所示。

為了將橫梁連接到船,我使用了 ? 英寸不銹鋼螺紋桿,它通過將船內(nèi)部的電機動力帶到橫梁表面來實現(xiàn)雙重功能。在左舷,我們有兩個螺紋桿,而在右舷,我們只有一個。注意帶電的拉桿盡量遠(yuǎn)離電機的安裝支架,以免電池線與電機的連接擰緊時造成短路。
8. 水測試結(jié)果
水中測試
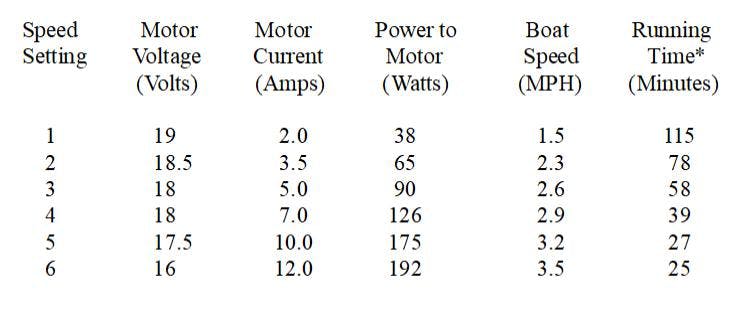
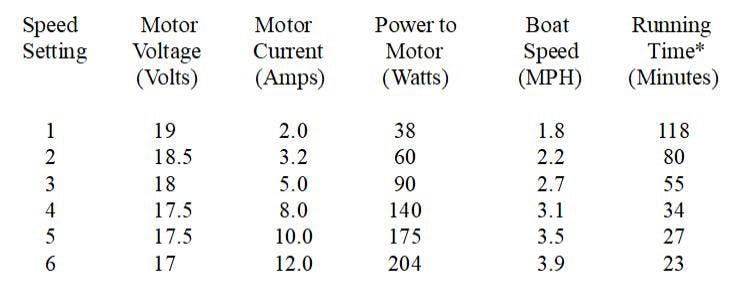
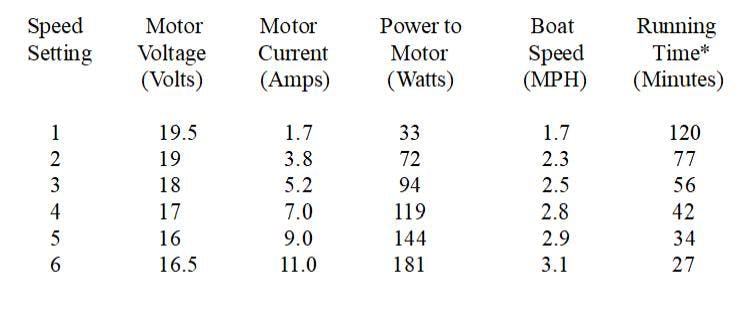
使用兩艘皮劃艇和兩臺電機,我們有四種配置來比較四組不同的性能結(jié)果。要收集的最重要信息是每個配置的效率。它將由給定功率(以瓦特為單位)產(chǎn)生的運行時間量決定。同樣重要的是在每個速度設(shè)置下達(dá)到的最大速度。
下面的四個圖表顯示了這些信息。對于每種配置的六個前進(jìn)速度設(shè)置中的每一個,都會測量以下數(shù)據(jù):電池電壓和電流(相乘時確定以瓦特為單位的功率)和速度。通過單獨的測試(桶水測試)確定每個速度設(shè)置的運行時間。四種配置如下:
A. 帶有 Minn-Kota (MK) 拖釣馬達(dá)的靜坐式(紅色)皮劃艇
B. 帶有 Newport Vessels (NV) 拖釣馬達(dá)的靜坐式皮劃艇
C. 帶 Minn-Kota 馬達(dá)的坐式(珊瑚)皮劃艇
D. 使用 Newport Vessels 電機的坐式皮劃艇
電壓和電流讀數(shù)取自控制臺上的儀表。計算以瓦特為單位的功率。速度是使用我 iPhone 上的衛(wèi)星應(yīng)用程序“MPH”獲得的。當(dāng)它在船上休息時,它工作得很好。我使用了杯架,它比試圖拿著手機好得多。
配置 A 的測試結(jié)果(帶 MK 的紅色皮劃艇)
配置 B 的測試結(jié)果(帶 NV 的 Red Kayak)
配置 C(帶 MK 的珊瑚皮劃艇)的測試結(jié)果
配置 D(帶 NV 的 Coral Kayak)的測試結(jié)果
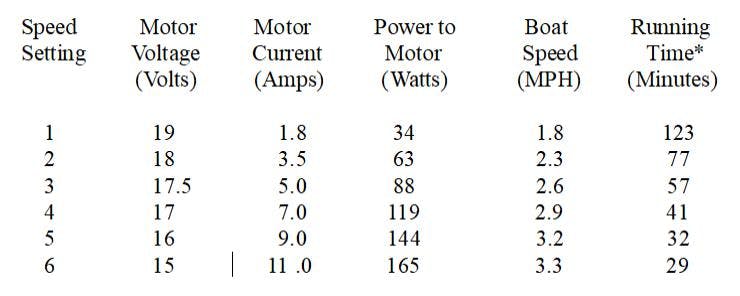
運行時間通過使用下面描述的桶水測試結(jié)果來確定。
桶裝水測試
確定運行時間,即一個充滿電的 4AH 或 6AH 電池,電機可以連續(xù)運行的時間,是一項耗時的任務(wù)。每臺電機必須以 6 種不同的速度設(shè)置運行總計近 7 小時,在此期間,水面上的天氣條件可能會發(fā)生變化。通過在裝滿水的桶中在更受控的條件下運行電機可以獲得更準(zhǔn)確的結(jié)果。槍管中有更多的湍流,但只要電池的消耗量與馬達(dá)為船提供動力時的消耗量大致相同,結(jié)果就有效。運行時間數(shù)字是從桶測試中獲得的。下面的曲線和兩個圖表顯示了每個電機的運行時間。
請注意,位置 1a 已添加到桶測試的 6 個前沿位置。添加它是為了產(chǎn)生更低的速度和更少的電池消耗,當(dāng)電機用于在開闊水域推動船時,這與位置 1 更兼容。測試表明,在相同速度位置下,在開闊水域中,電池消耗比在桶的湍流水中要少得多。為了運行位置 1a 的桶測試,我們簡單地將位置 1 的 PWM 數(shù)量從 60 減少到 55。
桶測試結(jié)果
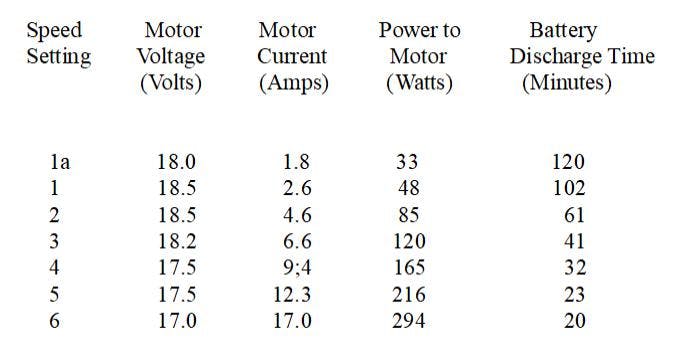
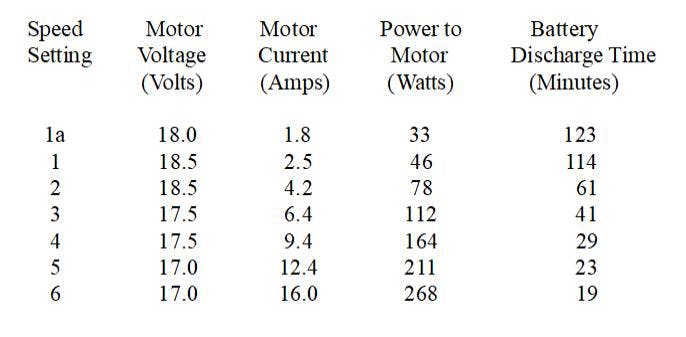
下面兩個圖表顯示了每個電機在 7 個前進(jìn)位置(包括位置 1a)的運行時間。該數(shù)據(jù)繪制在下圖所示的曲線上,用于確定水測試結(jié)果中每個位置的運行時間。這些測試使用額定為 4 AH 的電池。如果使用 6 AH 電池,結(jié)果將增加 50%,即位置 1a 的運行時間為 3 小時。請注意,使用任一電機的電池具有相同的特性。
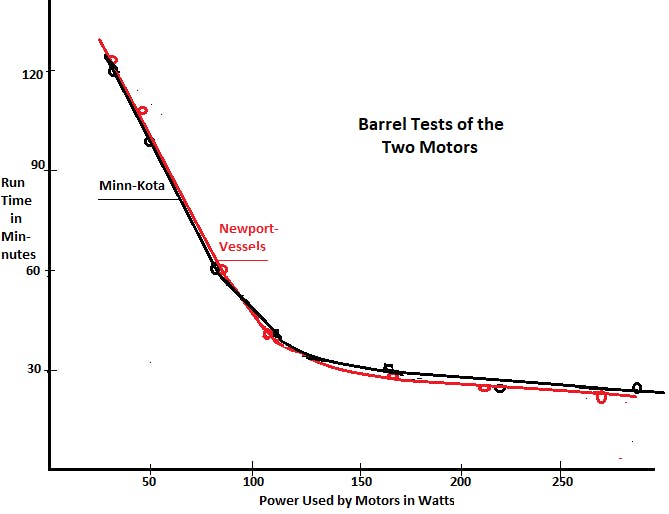
Minn-Kota 拖釣船馬達(dá)
紐波特船舶拖釣船
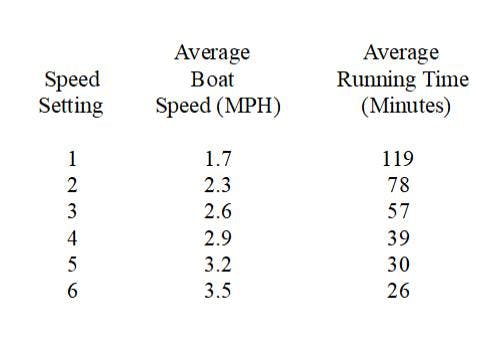
平均速度與運行時間
現(xiàn)在我們已經(jīng)將運行時間與船速(確定范圍)相關(guān)聯(lián),我們可以對四種配置的值進(jìn)行平均,并顯示下面的結(jié)果圖表。對于每個速度設(shè)置,我們都有完全充電的 4 AH 電池產(chǎn)生的平均船速和平均運行時間。
總結(jié)和結(jié)論。
使用一個小型鋰離子 4 AH 電池組以 1.7 MPH 的拖釣速度為 10 英尺船供電兩小時或以 3.5 MPH 的船體速度為近半小時供電是一項了不起的壯舉。我是船操作員,體重 185 磅,所以如果操作員較輕,結(jié)果會更好。皮劃艇槳手的平均速度為 2.8 MPH。
獲得出色的低速結(jié)果的主要原因是我們使用了脈沖寬度調(diào)制技術(shù)。與電阻器相比,它通過將多余的功率轉(zhuǎn)化為熱量來浪費能量,從而有效地降低了速度。PWM 技術(shù)的一個好處是該軟件同時將 18 伏電池組電壓轉(zhuǎn)換為拖釣電機所需的 12 伏電壓。
為了實現(xiàn) PWM 電機驅(qū)動,我們構(gòu)建了兩個用于插入電池組的控制臺。控制臺中的另外兩個電子元件是 Arduino Uno,它在一個非常簡單的軟件草圖的控制下產(chǎn)生 PWM 信號,以及一個 20 安培的 Cytron 驅(qū)動器,用于運行機器人電機。Cytron 只需要 3 根來自 Arduino Uno 的信號線。由于它們的簡單性,兩個控制臺在項目的設(shè)計、施工和測試過程中都能完美運行。
Ryobi 電池組也可以完美運行。我以 100 美元的價格購買了兩個 4 AH 單位。6 AH 單元也很容易買到,但每個單元的價格超過 100 美元。請務(wù)必購買正品 Ryobi 產(chǎn)品。市場上有許多不符合所聲稱的 AH 規(guī)格的“仿制品”。一位產(chǎn)品評論員指出,這些仿冒品的重量遠(yuǎn)低于正品。
與鉛酸電池不同,鋰離子電池更小更輕,在從 2 安培到 12 安培的所有放電速率下都滿足 4 AH 額定值。內(nèi)置指示燈可用于監(jiān)控電池的充電水平。充電器同樣工作良好。您可以在大約兩個小時內(nèi)充滿電。
這種設(shè)計強調(diào)了電力推進(jìn)的快速設(shè)置。只需將兩根電線連接到電機上。電機通過兩個大蝶形螺母連接到迷你橫梁上。通過向前傾斜電機,無需進(jìn)一步調(diào)整,轉(zhuǎn)向電纜即可輕松卡在轉(zhuǎn)向桿上。
桶水測試提供了一種可重復(fù)的方法來構(gòu)建確定六種速度設(shè)置的運行時間所需的曲線。整個電池充電的連續(xù)運行預(yù)示著電子設(shè)備的可靠性,尤其是 Cytron 電機驅(qū)動模塊的可靠性,該模塊在檢查時從未超過溫暖。
水測試表明,6 個位置的速度正確響應(yīng)為每個位置選擇的 PWM 編號。位置 3 的平均速度為 2.6 MPH,接近槳手的平均速度 2.8 MPH。在這個速度下,產(chǎn)生約 1/8 馬力的 4 AH 電池組將驅(qū)動 10 英尺的皮劃艇行駛 57 分鐘,距離約 2.5 英里。
水測試還表明,傳統(tǒng)的坐式皮劃艇排水型船體比坐式皮劃艇的扁平船體快一點。紅色(坐式)皮劃艇的吃水線長度為 9 英尺,船體速度為 3 x 1.34,等于 4 節(jié)或 4.6 MPH。使用大約 200 瓦功率(大約 1/4 馬力)的任一電機,我們都接近達(dá)到這個速度
有什么可以改進(jìn)的?如果我再做一次,我會更多地考慮讓控制臺防水。在水測試期間我沒有遇到水問題,但我可以看到這可能是一個長期的問題。另一個可以改進(jìn)設(shè)計的領(lǐng)域是轉(zhuǎn)向。應(yīng)該對其進(jìn)行修改,以便能夠進(jìn)行更急轉(zhuǎn)彎。可能縱橫交錯的電纜會有所幫助。
9. 運輸和啟動皮劃艇
運輸皮劃艇
在水上度過一天的部分樂趣在于能夠處理讓船準(zhǔn)備好下水的瑣事。很少有人在他們的后院有一個碼頭,讓他們可以隨時跳上船。順便說一句,即使是那些船也很少使用。下一個最好的事情是在離家很短的車程內(nèi)的碼頭或水上某處的停泊處有一艘船。對于我們大多數(shù)人來說,所涉費用的現(xiàn)實迫使我們用拖車或?qū)⒋\到海灘或汽車或卡車的發(fā)射區(qū)。
對我來說行不通的是將一艘帆船拖到下水點,然后花很長時間讓船準(zhǔn)備好下水。我見過人們到達(dá)發(fā)射區(qū),即使有兩個人在做這項工作,也要花一個小時踩桅桿、調(diào)整支柱、展開和連接帆、安裝舷外機和發(fā)射船。然后,他們?nèi)匀恍枰业揭粋€停靠區(qū)和一個停放汽車和拖車的地方。
我也試過充氣路線。即使使用最好的泵,手動或電動,也需要付出很多努力才能讓船準(zhǔn)備好,當(dāng)你完成后,你最終可能會得到一艘不那么適合航海或令人愉快的船。
因此,在嘗試了許多劃船選擇之后,我很高興選擇一艘我可以自己處理并在幾分鐘內(nèi)準(zhǔn)備好下水的皮劃艇。上面討論的 10 英尺皮劃艇僅重 40 磅,它們很容易裝載在汽車或卡車中或放在屋頂上。我曾經(jīng)以這種方式攜帶獨木舟和鋁制船,但我從來沒有在高速公路上駕駛過我的屋頂上有大東西的舒適。另一種方法是將船放在 SUV 的后部(離地面只有 30 英寸),并讓后艙口部分打開。但這會導(dǎo)致兩個問題:內(nèi)部變臟,打開的艙口在高速行駛時會產(chǎn)生大量的風(fēng)和噪音。污垢問題只能通過讓皮劃艇干燥半小時并用毛巾刷好或擦去沙子來緩解。
但是用擋板可以大大降低噪音。然后將噪音水平降低到更像是打開后窗而不是打開艙口。下圖顯示了我為降噪和防風(fēng)以及將皮劃艇保持在適當(dāng)位置而建造的擋板。擋板由 2 x 4 英尺的 3/8 膠合板制成。為了提高汽車和擋板之間的密封性,頂部 8 英寸部分由 2 英寸厚的泡沫制成,可適應(yīng)后窗的輪廓。家得寶以大約 5 美元的價格出售 22 X 22 英寸的 2 英寸正方形泡沫。在我的車?yán)铮瑩醢蹇梢杂脙蓚€小桶螺栓閂鎖(4 美元)連接,這些閂鎖滑入通常用于架子的現(xiàn)有孔中。
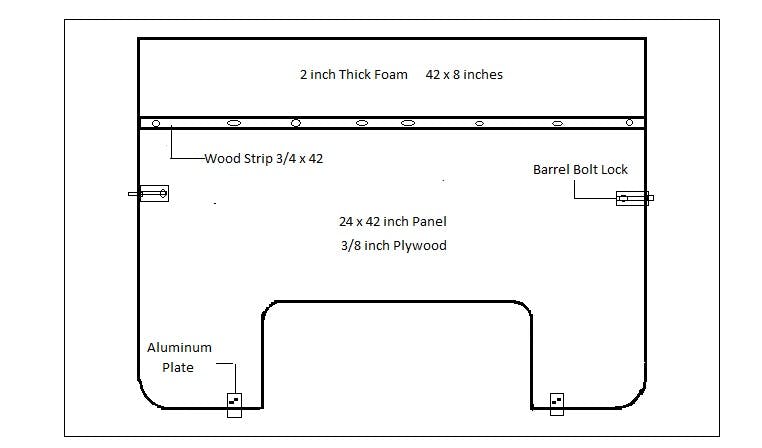
兩塊大約 8 x 21 英寸的泡沫以下列方式連接到面板上。用電刀或電動曲線鋸在泡沫中間切出一個 1.5 深的槽,以便泡沫可以滑過膠合板的頂部。在每塊泡沫中鉆四個 3/16 孔,穿過前后 3/4 英寸的木條,并穿過膠合板的頂部。必須沖出穿過泡沫的孔。我使用了帶有 2 英寸長的鎖緊螺母的 #8 螺釘,但 2 ? 長的螺釘會使組裝更加容易。
面板底部用兩個 1/8 英寸的鋁板固定,尺寸為 1 ? x 2 ? 英寸。它們安裝在地毯和汽車裝飾之間,如下圖所示。

皮劃艇伸出艙口約 18 英寸,艙口下來停在船上。艙口和船之間的墊子可以避免劃傷和嘎嘎聲。需要兩個強大的沖擊弦來保持艙口向下。在我的車?yán)铮?dāng)艙門打開時會響起警報。這個問題很容易解決。通過使用一字螺絲刀將鎖定機構(gòu)觸發(fā)到關(guān)閉位置,可以誘騙警報器認(rèn)為艙口已鎖定。確保在關(guān)閉艙口之前解鎖它(使用答題器)。
啟動皮劃艇
啟動皮劃艇很容易。將其拖到水中,并用大旋鈕將拖釣馬達(dá)固定在橫梁上。電機的電源由從橫梁突出的 2 個端子提供(紅色為 +,它連接到前螺栓)。然后電機向前傾斜,兩條轉(zhuǎn)向線的末端卡在轉(zhuǎn)向桿上。將電機返回到鎖定位置以拉緊線。然后將電池組卡入控制箱中,您很快就可以在水上度過愉快的一天。
- Arduino Arduboy控制臺開源分享
- RT-Thread文檔_FinSH 控制臺
- 皮劃艇GPS導(dǎo)航開源分享
- 帶霍爾傳感器的賽艇控制臺
- Arduino DM控制臺開源分享
- Raspberry Pi串行控制臺迷你帽
- SNES控制器可用于80 90年代的計算機和控制臺
- Cartrdige Vectrex控制臺開源項目
- 帶有LFO的Atari Punk控制臺
- SE的Atari Punk控制臺
- SU RUBy控制臺如何使用?SU RUBy控制臺的一個應(yīng)用實例說明 0次下載
- 基于QT18控制臺使用范圍 0次下載
- 基于LabVIEW的高速相機同步控制臺_任小均 19次下載
- windows控制臺常用命令解釋 0次下載
- 激光測距機顯示控制臺的設(shè)計
- 磁柵尺是什么?以及磁柵尺的3大結(jié)構(gòu),一起看看吧 268次閱讀
- 計算逆變器導(dǎo)線大小技巧,英尺之間的為2/0 750次閱讀
- 電動機控制電路圖大全 2621次閱讀
- 簡單認(rèn)識電動機控制器 876次閱讀
- 一個簡易的控制臺程顯示程序 349次閱讀
- 如何使用Rust的標(biāo)準(zhǔn)庫和structopt庫來處理控制臺參數(shù) 1082次閱讀
- 主控指令控制電機和滑臺運動 1057次閱讀
- 基于單片機IAP技術(shù)和aLABVIEW實現(xiàn)遠(yuǎn)程多對象控制系統(tǒng)的設(shè)計 2720次閱讀
- 采用單片機和MCP2510、MCP2551芯片設(shè)計集散型火災(zāi)報警控制系統(tǒng) 4486次閱讀
- 光柵尺工作原理 2.4w次閱讀
- Digilent PCB尺簡介 1150次閱讀
- 光柵尺的作用_光柵尺和磁柵尺的區(qū)別 2.9w次閱讀
- 光柵尺傳感器的應(yīng)用及使用注意事項 6368次閱讀
- 淺談磁柵尺的材質(zhì)及特點 4334次閱讀
- dmx512控制臺是什么_dmx512控制臺按鍵說明 2.6w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論