 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
激勵
今天的生活與 COVID-19 之前的生活大不相同。成人和兒童都被迫隔離,事實證明這不僅對身體有害,而且對精神和情感造成傷害。我們的目標是提供一種不僅安全,而且具有娛樂性和挑戰性的娛樂方式。
MOTIVATE 是我們的創作,它提供了一個虛擬迷宮,用戶在其中與其他用戶和 AI 機器人競爭以完成迷宮而不被捕獲。完成迷宮不僅需要身體能力,還需要空間和邏輯推理。
游戲設置
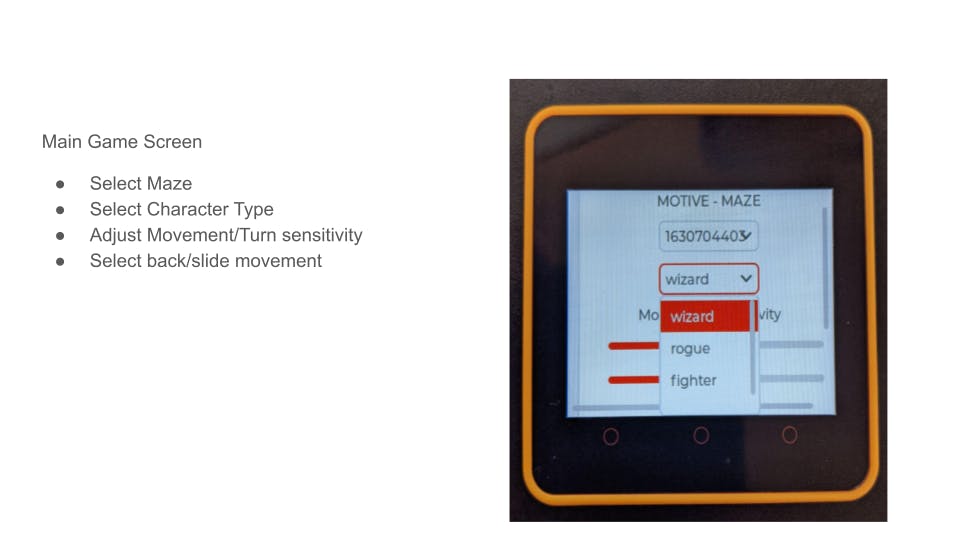
玩家首先選擇他們的迷宮。他們可以選擇一個活躍的游戲或請求一個新生成的迷宮。活躍游戲可以有其他活躍玩家或機器人,而新游戲是本地游戲而不是多人游戲。然后玩家繼續選擇他們的角色類別。職業是:巫師、盜賊和戰士。奇才將盜賊送回開始,盜賊將戰士送回開始,戰士將奇才送回(roshambo風格)。玩家還可以通過選擇游戲選項卡并使用靈敏度滑塊隨時設置移動和轉動靈敏度以及“后退”和“左/右滑動”動作。一旦用戶做出他/她的選擇,他們通過滑動并選擇游戲選項卡來繼續游戲。
游戲玩法
游戲是實時進行的,玩家使用動作來導航迷宮。玩家的目標是在最短的時間內走到迷宮的盡頭。不過也有障礙。玩家必須找出最短路徑,同時在可能屬于競爭角色類別的其他玩家周圍導航。捷徑確實存在。如果使用正確的動作,迷宮將包含“高”和“低”的墻壁,用戶可以通過這些墻壁。高墻是綠色的,可以“蹲”過,低墻是黃色的,可以“跳”過。
游戲運動
玩家可以使用以下動作在迷宮中導航:
- 向前——向前走。將玩家向前移動 1 步
- 左/右轉 - 向左或向右旋轉。向左或向右改變玩家方向 90 度。
- *向后 - 向后走。將玩家向后移動 1 步
- *左/右滑動 - 向左或向右側步。將玩家向左或向右移動 1 步。
*可選,可以在游戲選項卡上切換。
迷宮標簽
迷宮選項卡是玩游戲的主要選項卡。玩家有兩張地圖;以玩家為中心并以玩家為中心的主要相對地圖以及具有靜態方向并顯示整個地圖以及所有玩家和位置的較小絕對地圖。選項卡的右下部分有信息窗格。在這個窗格中,玩家可以看到他們的步數、活動動作分類、對手的名字、經過的時間以及穩定性和動作 LED。穩定性 LED 指示設備被保持在正確的位置。如果設備未保持在正確位置,此 LED 將閃爍。運動 LED 指示分類器正在運行并處理來自 IMU 的信號。
訓練選項卡
訓練選項卡用于收集用于構建激勵 CNN 模型的訓練樣本。用戶可以使用右側控制按鈕選擇他們的類操作,并使用中間控制按鈕打開/關閉收集。將以 30Hz 的頻率收集樣本。并通過 AWS IoT (MQTT) 提供給激勵后端。
建造
激勵具有三個主要組成部分;激勵模型、后端和應用程序。該模型是一個基本的 CNN 分類器,在 Core2 上本地運行,并提供 IMU 測量的實時分類以確定玩家運動。后端用于生成和分發迷宮、收集訓練數據和多人游戲管理。應用程序是在 Core2 上本地編譯和運行的一組代碼和包。
模型
訓練中使用的模型數據是;20 個標準化 IMU 讀數樣本 @ 30 Hz。(約 2/3 秒的訓練樣本)。標準化通過以下方式完成:
(Sa-Samin)/(Samax-Samin) * 255和(Sg-Sgmin)/(Sgmax-Sgmin) * 255
在哪里:
- Sa - 加速度計 XYZ 樣本
- Sg - 陀螺儀 XYZ 樣本
- Samin/max - 加速度計最小值/最大值(通過檢查發現)
- Sgmin/max - 陀螺儀最小/最大值(通過檢查發現)
模型數據標注如下:
- 0 - 休息
- 1 - 前鋒
- 2 - 向后
- 3 - 左轉
- 4 - 右轉
- 5 - 向上(跳躍)
- 6 - 向下(蹲下)
- 7 - 左側臺階
- 8 - 右側踏步
該模型是一個簡單的卷積神經網絡,具有以下架構:
Model: "sequential"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
conv2d (Conv2D) (None, 20, 6, 16) 208
_________________________________________________________________
max_pooling2d (MaxPooling2D) (None, 6, 2, 16) 0
_________________________________________________________________
dropout (Dropout) (None, 6, 2, 16) 0
_________________________________________________________________
conv2d_1 (Conv2D) (None, 6, 2, 16) 1040
_________________________________________________________________
max_pooling2d_1 (MaxPooling2 (None, 2, 2, 16) 0
_________________________________________________________________
dropout_1 (Dropout) (None, 2, 2, 16) 0
_________________________________________________________________
flatten (Flatten) (None, 64) 0
_________________________________________________________________
dense (Dense) (None, 16) 1040
_________________________________________________________________
dropout_2 (Dropout) (None, 16) 0
_________________________________________________________________
dense_1 (Dense) (None, 9) 153
=================================================================
Total params: 2,441
Trainable params: 2,441
Non-trainable params: 0
培訓結果
以下是每個標簽的 F1 分數。達到了 A.95 F1 復合精度。
class precision recall f1-score support
0 1.00 0.95 0.98 44
1 0.90 0.94 0.92 95
2 0.93 0.91 0.92 109
3 1.00 1.00 1.00 52
4 1.00 1.00 1.00 41
5 1.00 1.00 1.00 38
6 0.99 1.00 0.99 71
7 0.88 0.91 0.89 54
8 0.95 0.91 0.93 45
accuracy 0.95 549
macro avg 0.96 0.96 0.96 549
weighted avg 0.95 0.95 0.95 549
將模型部署到設備
提供的 jupyter notbook 的最后一步是下載模型結果。在將模型導入您的應用程序時,請使用 `xxd` 工具將 tflite 模型文件轉換為 ac 源文件并將結果復制到您的項目中。
xxd -i mot-imu-quant.tflite > mot-imu-model.cc
sed -i 's/mot_imu_quant_tflite/g_model/g' mot-imu-model.cc # change model name to match code
cp mot-imu-model.cc <to your project>
后端
后端由一些不同的 AWS 服務組成,如下所示:
- Maze Proxy - 為 Maze 服務提供 HTTP 前端。
- Maze API - 用于迷宮生成和傳播的 HTTPS Restful 接口。
- Maze Generator - 用于檢索和生成迷宮的 Lambda。
- MOT MQTT - MQTT 中間件,用于定義主題拓撲、生成 MOT 設備密鑰和 MQTT 消息傳播以進行游戲。
- 游戲管理器 - 運行 MOT 機器人和游戲管理器的 EC2 系統。
迷宮生成和游戲機器人/管理器的代碼可以在mot-play存儲庫中找到。后端當前存在并且可用。如果您希望構建此項目而不提供后端,請聯系一組密鑰。
應用
該應用程序由 platformio 項目中的一組 c++ 和 c 代碼組成。重新創建應用程序的步驟如下:
pio run -t menuconfig
# Update the following to be unique
MOT MQTT Config -> MOT Client ID
# Update the following with your WiFi Config
WiFi Configuration -> SSID
WiFi Configuration -> WiFi Password
- 為 AWS IoT 連接請求(或生成)MOT 證書并復制到:
.../motivate/maze-app/certs
- 構建并刷新您的設備
- 移動通信技術的演變:從1G時代到5G時代大變遷
- 使用裸導電觸摸板和電動油漆讓樂高墻互動
- 適用于Covid-19的免費診斷移動應用程序和DIY防護面罩
- 可預測眾包工人移動軌跡的任務預測模型 3次下載
- PLC技術在移動機器人中的應用研究 19次下載
- 互聯網時代下:ZigBee、GPRS在充電樁中的應用資料下載
- 區塊鏈在移動邊緣計算中的應用及發展前景 12次下載
- DSP技術在現代移動通信領域的應用 21次下載
- 如何使用LBS設計實現移動訂餐系統 5次下載
- Arduino如何與Processing進行連接互動詳細方法說明 25次下載
- 基于Web Service的移動醫療信息系統 2次下載
- 高通在加速移動VR進程中的技巧分享 17次下載
- 嵌入式移動代理的設計與實現 30次下載
- Bluetooth無線技術讓移動裝置打印步入實用
- 嵌入式移動數據庫研究
- 射頻與移動通信速率的聯系 3956次閱讀
- 視覺處理器讓自適應機器人成為現實 1918次閱讀
- 互動白板的整體技術框架和優勢 4366次閱讀
- dfrobotS4A和互動媒體技術介紹 1202次閱讀
- 傳音移動通訊終端在不同界面切換使用的專利 3027次閱讀
- firefly互動廣告機概述 1486次閱讀
- firefly雙屏互動簡介 1439次閱讀
- 各類主流AR互動系統技術的原理,實現及創意延伸 8380次閱讀
- 人際大腦同步在社會互動學習中的作用機制 4341次閱讀
- 利用SoC芯片驅動軟網絡 1093次閱讀
- 工業無線通訊時代正式來臨 選擇通訊協議和設備成為人們的選擇難題 1w次閱讀
- 引入SDN/NFV 構建5G時代的移動承載網 1190次閱讀
- 移動電源保護電路的設計與產品的選擇技巧 1107次閱讀
- 內部構造大解析,讓你徹底了解移動電源 1.4w次閱讀
- 全面解析互動投影系統的原理及其應用 5486次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論