 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
這個機器人一直是我的夢想,現在終于完成了!
特征:
補給品:
- Raspberry Pi 零 W -在 Adafruit
- Arduino Nano -在紐瓦克
- TT 變速箱電機 -在 Adafruit
- 超小紙箱
- 公/母跳線 -在紐瓦克
- 母/母跳線 -在紐瓦克
- 公/公跳線 -在這里 - 你猜對了 - 紐瓦克
- DRV8833 電機驅動器 -在 Adafruit
- Raspberry Pi 攝像頭模塊 -在紐瓦克
- 滑動開關 -在紐瓦克
- 9V電池
- 9V 電池夾 -再次來到紐瓦克
- USB 鋰離子電池充電器 -在 Adafruit
- 2 節鋰離子電池 1000mAh -在紐瓦克
- 腳輪 -在 Adafruit
- Raspberry Pi 零到相機適配器帶狀電纜 -在 Adafruit
- USB 到 Micro-B 電纜 -在 Ebay 上
應用:
- Raspberry Pi OS -在 Raspberry Pi
- Arduino 創建網絡編輯器 -在 Arduino
工具:
第 1 步:底盤設計
這就是 3D 打印機的用武之地。如果需要,您可以為您的盒子打印底盤。
首先,拿出你的熱膠槍并將其加熱。(別擔心,熱膠只是暫時的。)加熱后,拿你用來做底盤的任何東西,然后把 TT 電機粘在上面。然后,將盒子粘在上面。
第 2 步:電池安裝
使用雙面膠將 9v 電池固定在側面,并使用另一個將 3.7v 電池固定在側面。將 2 根普通跳線放入 3.7v 電池孔中。將 2 個 MF 跳線放在 9v 電池線上。在盒子的側面鉆一個孔,然后將 3.7v 電池線穿過。
3.7v 電池用于 Arduino,9v 電池用于電機。
第 3 步:電機驅動器安裝
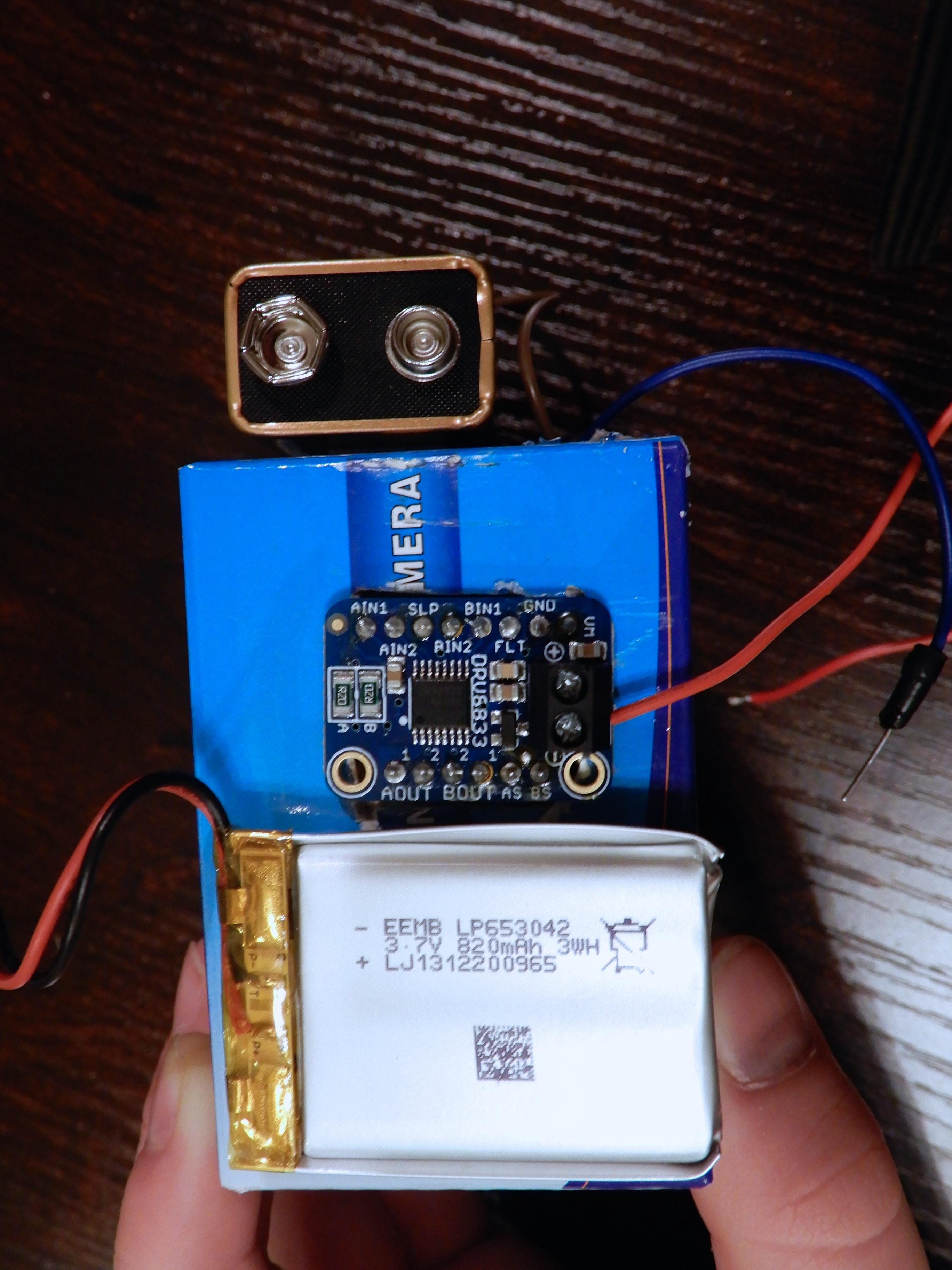
用旋轉工具在盒子上切一個 DRV8833 大小的孔。(我建議你測量它。)
將 DRV8833 熱膠粘在邊緣周圍。我說熱膠是因為你可能需要做出改變。
第 4 步:傳感器安裝
拿起你的 HC-SR04 并測量它。得到長度和寬度,然后在機箱外殼上畫出相應距離的線,制作切割模板。
使用旋轉工具切割線條。
將超聲波傳感器穿過孔。如果合適的話,太好了!如果不是,請相應調整。確保“光束”沒有被阻擋。
像使用 DRV8833 一樣在它周圍粘上膠水。
第 5 步:接線
這是最難的部分。
因為線太多,所以我沒有做電路圖,但下面的列表顯示了引腳編號。
引腳編號:
- 將您的 HC-SR04 觸發到引腳 9
- HC-SR04 的回聲到引腳 10
DRV8833 引腳:
- AIN1 到引腳 4
- AIN2 到引腳 5
- SLP 至 3.3V
- BIN2 到引腳 6
- BIN1 到引腳 7
- AOUT 1 至左電機 RED
- AOUT 2 至左電機 黑色
- BOUT 2 到右電機黑色
- BOUT 1 至右側電機 RED
和往常一樣,將電源線放在各自的位置。我建議將每個電源引腳斷開到面包板條上。將 Nano 放入盒子中(如果不這樣做,則無法連接它)。
將第一個電池的紅色插入 Nano 的 VIN,然后當你準備好滾動時,將電池的黑色插入 GND。
第 6 步:編碼
在 GitHub下載 Arduino 的代碼。將其上傳到您的 Nano。
在啟動時在 Raspi Zero 上運行 .py 文件,如下所示:
在終端中運行此命令:
sudo nano /etc/rc.local
在 exit0 行之前添加此行:
python3 /home/pi/Desktop/(Ra)Spy-Bot Cam.py &
按 ctrl + x,然后按 y,然后輸入。
而已!
對于流式傳輸,做同樣的事情,但在 exit0 行之前添加此行:
python3 /home/pi/Desktop/(Ra)Spy-Bot Stream.py &
注意:將文件名和路徑更改為適合您的文件名和路徑,例如:
python3 /home/pi/Documents/your_file_name &
第 7 步:相機安裝
在前面鉆一個足夠大的孔來安裝相機,然后將帶有適配器電纜的相機插入 Raspi Zero 的連接器。
將相機穿過孔,然后粘上邊緣。把你的零放在機箱外殼中。將 USB 轉電池轉換器放入您的盒子中,準備好后,插入并觀看記錄!
第8步:完成!
確保外殼中沒有短路。打開它。如果成功了,恭喜!!!你做到了!
做一個測試任務來慶祝,然后休息一下,觀看你的 1 1/2 分鐘節目或直播!
感謝您觀看我的項目!
直到下一次,
來自 g3holliday 的快樂制作
- EMAR迷你緊急救援機器人的設置和安裝
- 掃地機器人開源資料 43次下載
- Feather藍牙迷你機器人
- 英雄機器人開源
- 迷你自主機器人開源分享
- 機器人開源案例
- Arduino Uno迷你機器人開源分享
- 迷你平衡機器人
- 基于DSP和PC的農業機器人控制系統 17次下載
- 可視頻直播的Raspberry Pi網絡控制機器人 14次下載
- 基于RTP協議的視頻流媒體實時傳輸 20次下載
- 基于新松機器人的LOVE字樣視頻 48次下載
- 四足機器人測試視頻下載 130次下載
- 移動流媒體技術在視頻監控中的應用
- 基于Directshow的流媒體視頻混合及網絡傳輸系統
- 字節發布機器人領域首個開源視覺-語言操作大模型,激發開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 842次閱讀
- OpenHarmony視頻錄制流程介紹 535次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotSparki機器人套裝簡介 2064次閱讀
- dfrobot優質迷你面包板簡介 1706次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9571次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 醫用機器人的功能_醫用機器人分類 2227次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 云視頻技術讓機器人更具有娛樂性讓機器人更融入你的生活 3520次閱讀
- 飛思卡爾I.MX27機器人視頻監控系統設計 718次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 2Keysight B1500A 半導體器件分析儀用戶手冊、說明書 (中文)
- 19.00 MB | 4次下載 | 免費
- 3BT134雙向可控硅手冊
- 1.74 MB | 2次下載 | 1 積分
- 4一種新型高效率的服務器電源系統
- 0.85 MB | 1次下載 | 1 積分
- 5PR735,使用UCC28060的600W交錯式PFC轉換器
- 540.03KB | 1次下載 | 免費
- 6WTS-100(1.1) UWB 信標定位系統 彩頁
- 540.48 KB | 1次下載 | 免費
- 7DV2004S1/ES1/HS1快速充電開發系統
- 2.08MB | 1次下載 | 免費
- 8MATLAB繪圖合集
- 27.12 MB | 1次下載 | 5 積分
本月
- 1使用單片機實現七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 2UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 15次下載 | 免費
- 3DMT0660數字萬用表產品說明書
- 0.70 MB | 13次下載 | 免費
- 4ST7789V2單芯片控制器/驅動器英文手冊
- 3.07 MB | 11次下載 | 1 積分
- 5TPS54202H降壓轉換器評估模塊用戶指南
- 1.02MB | 8次下載 | 免費
- 6STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 7TPS92682-Q1幀定義和示例
- 891.71KB | 6次下載 | 免費
- 8HY12P65/HY12P66數字萬用表芯片規格書
- 0.69 MB | 6次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420061次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網監
工商網監
評論