 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
技術文摘
在 COVID-19 大流行下,全世界都強烈需要加速將機器人引入消毒任務。然而,現有的機器人存在很多問題,尤其是價格昂貴且難以量產。這個事實是致命的:前者是成本問題,阻礙了消費者購買機器人;后者是一個大規模生產的問題,阻止了供應商決定開發和銷售機器人。這兩個問題肯定會耽誤市場發展,消毒機器人在社會上的部署也會被推遲。
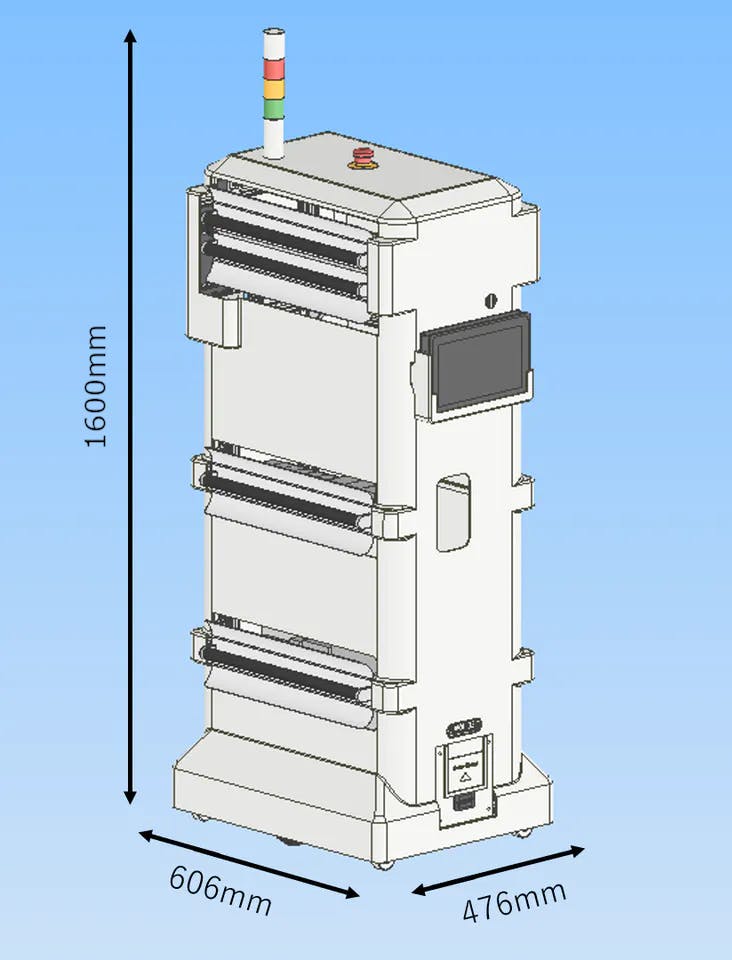
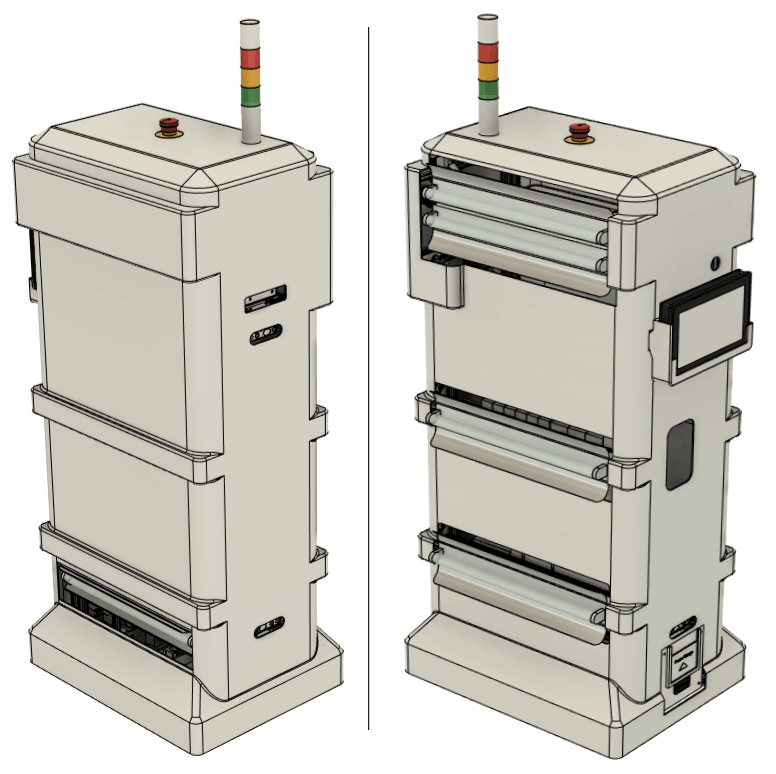
我們開發了一款名為“ Amabie ”的消毒機器人,它的名字來源于一種日本精神,它可制造且價格合理,可以解決這些問題。Amabie 自動使用紫外線燈對房間進行消毒。它的設計主要集中在三點:第一點是“可制造”,第二點是“實惠”,最后是“可擴展”。
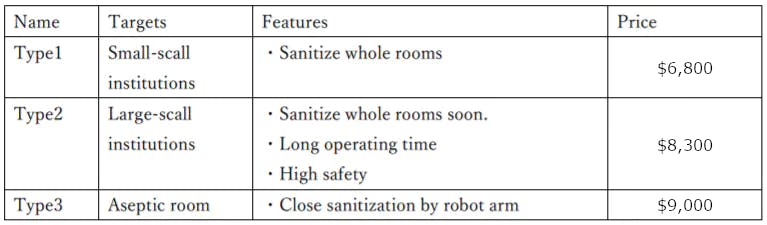
第一點,“可制造”是指易于批量生產。Amabie的硬件可以分為一些模塊,幾乎所有的模塊都是由可靠的供應商出售的現成零件組成的。這樣的設計使建造和維修變得簡單。此外,我們不必生產復雜的部件(例如電機單元)。與傳統機器人相比,不再需要建造 Amabie。第二點“負擔得起”意味著我們可以以低成本構建 Amabie,同時它具有足以在任何機構中使用的消毒能力。認真審視批量生產,我們意識到降低制造成本,包括零部件采購和組裝。最后一點“可擴展”意味著用戶可以輕松地為自己的環境定制 Amabie。例如,我們準備了三種類型的 Amabie:Type-1 是基本款,Type-2 有更多的紫外線燈和更大的電池,可以工作更長時間,Type-3 有一個機械臂。由于它們都基于相同的框架,因此三種類型的 Amabie 可以構建在相同的生產過程上。
在下文中,我們將描述構建基本模型 Amabie Type-1 的技術。我們的提議不僅包括機器人,還包括機器人系統,即安全使用 Amabie 的環境輔助模塊。我們工作的主要貢獻是集成。盡管每種基本技術都不是新的,但我們結合當前技術是最有效的消毒任務。
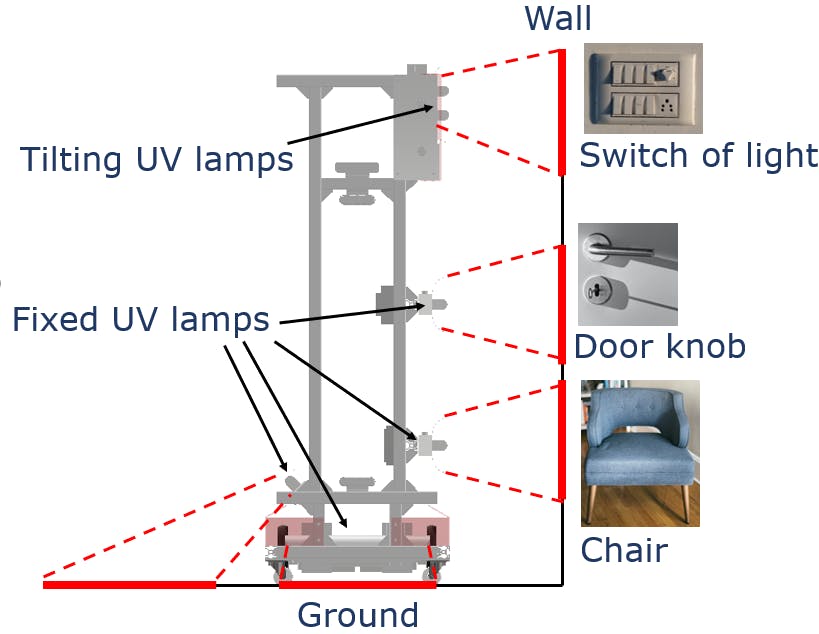
機器:兩個驅動輪驅動 Amabie,四個腳輪支撐它。即使 Amabie 在不光滑的地板上行駛,懸掛裝置也能使車輪保持穩定。它有六個紫外線燈:四個固定在主框架上,另一個(兩個燈)傾斜,以便不僅面向墻壁,而且面向床、椅子和桌子的頂部。
電路:Amabie 配備了鉛酸電池。為了安全緊急停止,斷路器經過精心設計,不會損壞 Amabie 的任何組件。為了最大限度地提高主計算機的性能,微控制器與執行器和模擬接口進行通信。
軟件:所有軟件均在機器人操作系統(ROS)上實現,這是一個全球使用的機器人平臺。許多在 ROS 上運行的資源已發布,它們可以根據需要擴展 Amabie。四個攝像頭模塊使 Amabie 能夠創建地圖、自我定位以及檢測物體和人類。
安全系統:雖然沒有人可以消除 Amabie 的盲點,但我們創建了一種新穎的系統來檢測人員以確保安全操作。我們開發了一種易于安裝在門上的信標。信標具有無線通信模塊和超聲波傳感器,因此它可以檢測到有人進入房間,然后信標將其發送給 Amabie。
1. 概念
介紹
這些天來,COVID-19 在全世界流行。由于許多感染者和患有基礎疾病的患者聚集在醫院,因此每天都在進行病毒清除活動。當然,即使在 COVID-19 全球大流行之前,這些活動每天都在進行。然而,大多數醫院的員工一直在使用含酒精的消毒噴霧劑或布進行消毒 [1]。然后,為了減少人為錯誤和勞動力成本,開發了紫外線機器人。例如,UVD Robots ApS 開發了 UVD 機器人 [2],General Disinfection Service 開發了“Light Strike”[3]。這些機器人可以消滅99.99%的病毒,所以一些醫院使用這些機器人。
但是這些醫院規模大,比如大學醫院,小醫院,比如個體醫院,很少引進這些機器人。主要原因是價格高。這些機器人大約是150,000美元。比較機器人的引進成本和人工成本,醫院只能判斷引進它不是工作。此外,考慮到電池壽命和其他性能,我們不能否認性能過高。沒有遭受醫療中斷的醫院將推遲引入它。然而,醫療行業正在日新月異。所以,如果他們需要紫外線機器人,我們現在就需要他們。因此,我們開發了滿足負擔能力并且可以立即引入現場的紫外線機器人“Amabie”。名字“阿瑪比”“來自日本精神。據說在日本,Amabie 預知流行病并避開人們。我們通過使其具有最低要求的功能和高擴展性,讓用戶可以選擇適合自己情況的 UV 機器人。這文章主要介紹最基本的類型。
概念
這就是我們的紫外線機器人“ Amabie ”。我們基于以下 3 個概念開發了 Amabie。
- 可擴展
- 經濟實惠
- 可制造
(1)可擴展
各種機構都需要UV機器人。因此,我們開發了以下 3 種類型以滿足各種需求。它就是其中的一個例子。Amabie 可以根據您的情況進行定制。
(2)經濟實惠
如表 1 所示,Amabie 價格低廉。現有的紫外線機器人幾乎是 150,000 美元。Amabie 不到現有紫外線機器人的十分之一。
(3)可制造
Amabie 很容易生產。您可以在 1 周內獲得 Amabie。因此,當您想要一個紫外線機器人時,例如流行病,您可以比其他紫外線機器人更快地獲得紫外線機器人“Amabie”。大約 80% 的 Amabie 零件由現成產品制成。所以,Amabie 很容易制作。
消毒性能
這是 Type1 的消毒區域。如圖所示,Amabie 的消毒范圍很大。
現有的紫外線機器人對空間進行消毒。但是,需要對醫院的表面進行消毒,等等[1]。因此,Amabie 接近目標進行正確消毒。
這種性能足以正確消毒幾乎所有區域。
二、操作說明
如何使用阿瑪比
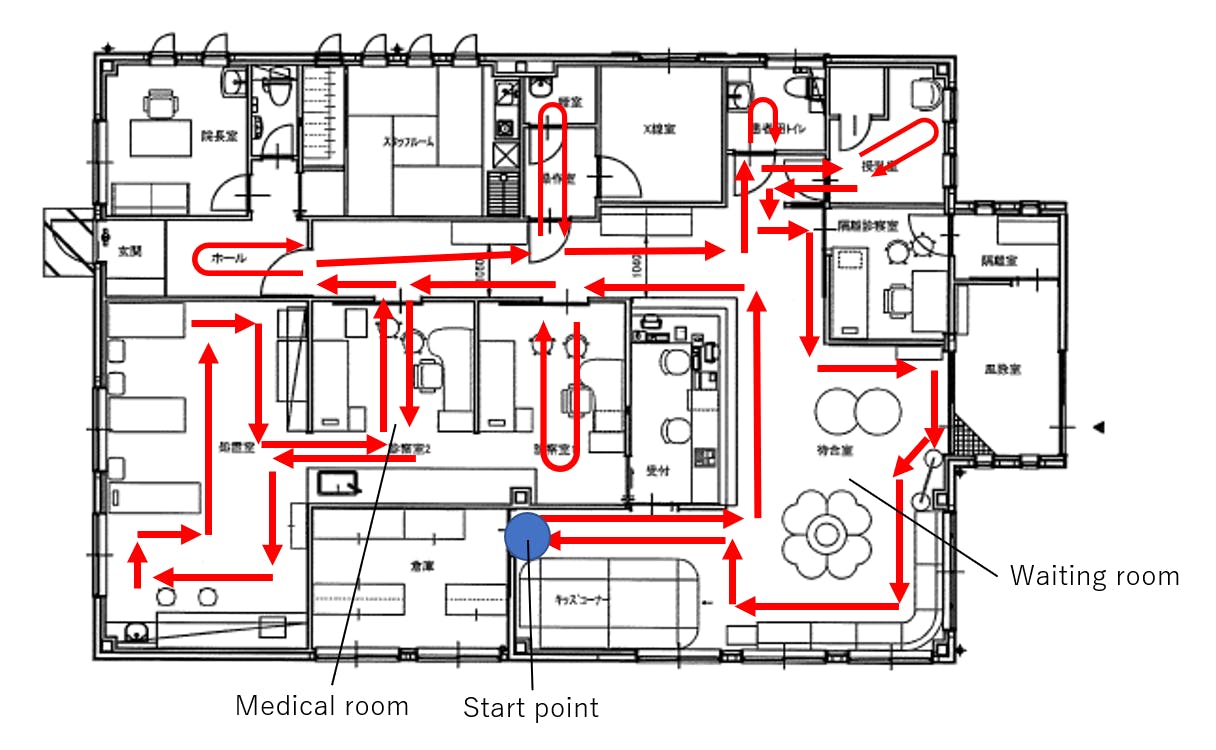
使用 Amabie 非常簡單。流量是;
(1) 您沿左側墻設置路線。
(2) 你按下啟動按鈕。
(3) Amabie 對房間進行消毒。
(4) Amabie 回到起點。
(5) Amabie 通知您。
一個示例課程就是這樣。
如何保養紫外線燈
當照明時間達到 6000 小時或燈泡發生故障時,應更換新的紫外線燈管。當 Amabie 的開關關閉時,用戶可以通過將燈旋轉 90 度來更換紫外線燈。當燈“亮”的次數達到指定次數時,應更換新的啟動器。當您移除 Amabie 的外殼時,用戶可以輕松更換增長啟動器,因為它是擰緊的。用戶可以查看點燈時間和燈“亮”的數量,但會在觸摸屏上顯示自動提醒。
3.紫外線燈
紫外線殺菌照射的目的
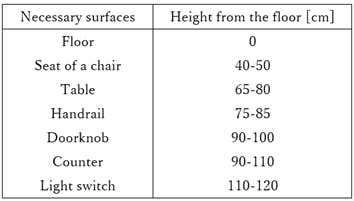
UV-C 光(波長為 200-280 nm)已被用于殺死或滅活細菌或病毒。由于 COVID-19 (SARS-CoV-2) 現在正在全球范圍內傳播,紫外線殺菌輻射引起了越來越多的關注。根據最新的期刊文章,UV-C(254 nm)照射在滅活和抑制 SARS-CoV-2 復制方面非常有效 [6]。Amabie 的目標不是對整個房間空間進行消毒,而是對必要的表面和地板進行有效的消毒。包括地板的原因是,當空氣中的飛沫落在地板上干燥時,病毒會在空氣中飆升[7]。
紫外燈規格
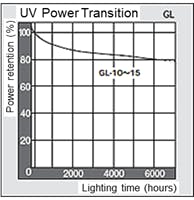
Amabie 有兩種類型的紫外線燈,由日本制造商松下制造。一種是GL 10,10W燈功率。另一種是GL15,15W燈功率。其他使用更高功率燈的 UV 機器人,例如 UVD 機器人使用 180W 的 UV 燈 [8]。我們認為 Amabie 有足夠的紫外線能量,因為她可以接近目標。這兩種燈都非常容易獲得,并且成本低于每單位 20 美元。此外,額定壽命,即保持80%輸出的時間為六千小時。一些紫外線燈的功率轉換尚不清楚,但 Amabie 燈的功率轉換已為人所知。因此,我們在計算中使用 80% 的紫外線輻照度,因為應該考慮紫外線燈的退化。

紫外燈布局
在 Type1 中,Amabie 有六個 UV 燈,其中兩個用于地板,四個用于墻壁或側面物體。在 Type2 和 Type1 的擴展版 Type2 和 3 中,Amabie 有 11 個 UV 燈,其中 3 個用于地板,8 個用于墻壁或側面物體。紫外燈對稱布局和Type2和3的高度。
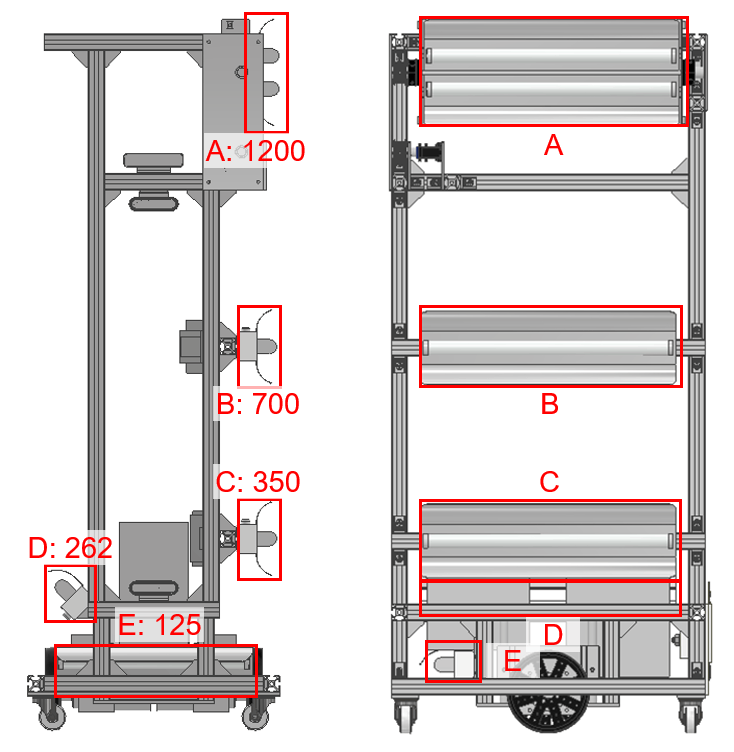
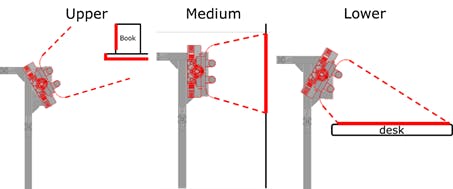
燈 A (A') 有兩個 UV 燈,因為它是由伺服電機傾斜的,所以它可以照射很廣的區域。所有的燈都有一個鋁反射器,所以它們的光線會集中在前面的中心。我們認為燈 A 可以通過傾斜有效地照射低處和高處。這是Amabie的一個關鍵點。燈 D (D') 和 E 用于地板消毒。燈E只有10W輸出(GL10),其他都是15W(GL15)。
UV-C 劑量計算
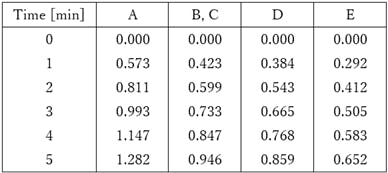
我們將5 分鐘內 25 mJ/cm2 或更多劑量定義為消毒條件,并計算每個紫外線燈的消毒距離和面積。將 E [μW/cm2] 定義為 1m 處的紫外線輻照度,將 t [s] 定義為曝光時間。γ [mJ/cm2] 作為來自紫外燈的 r [m] 位置處的輻照能量密度,已經表達了這個方程。
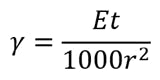
通過求解 r,可以得出 γ=25 mJ/cm2 或更大的劑量距離。
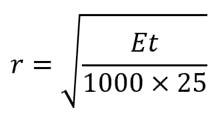
為簡化起見,將燈 A(2 個)視為具有兩倍輻照度的單個燈。如前所述,由于退化,我們在計算中使用了 80% 的紫外線輻照度。因此,GL10 在 1m 處的輻照度為 23.2 μW/cm2,GL15 為 40.8 μW/cm2。

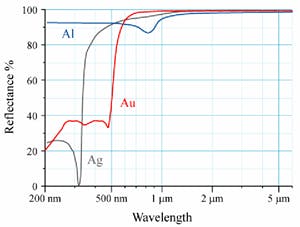
我們應該考慮反射器的影響,通過使用燈具的 CAD 數據來計算 Amabie 的正確消毒區域,因為所有燈都有一個鋁反射器。由于 GL10 和 GL15 的波長為 253.7 nm,因此我們在此計算中使用92%作為鋁反射器的反射率。
Amabie 有五盞燈,但燈 B 和燈 C 是一樣的。因此,我們分析了反射器的四種圖案效果。為簡化起見,我們只考慮直行或僅反射一次的光線。
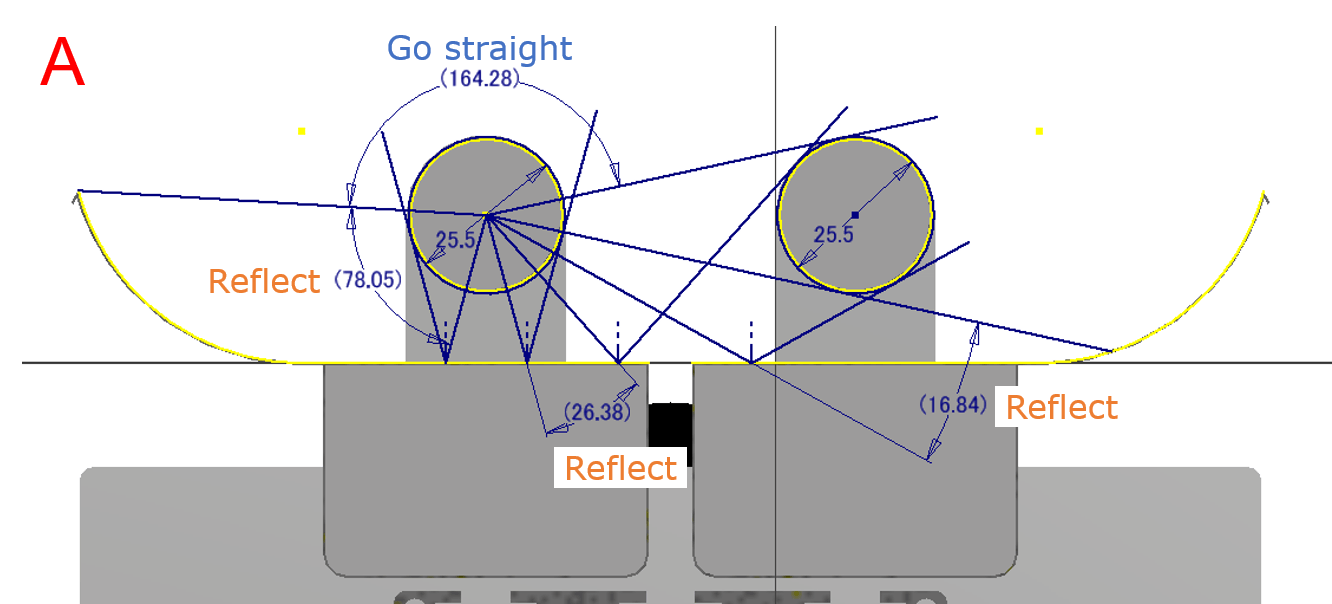
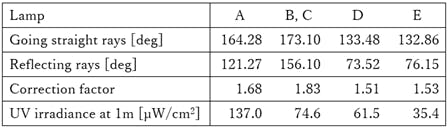
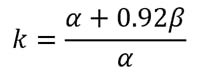
校正因子 k 表示反射器提高了多少輻照度,當 α 是直射光線而 β 是反射光線時,可以推導出這個方程。實際上,反射器的效果具有角度色散。但是,我們在此計算中使用校正因子進行簡化。
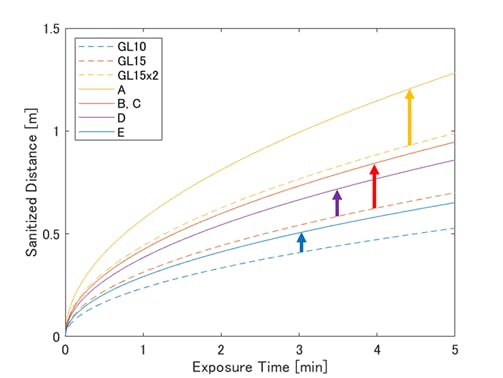
虛線是普通的紫外線燈,實線包括反射器的效果。結果,通過使用反射器改善了 Amabie 的消毒區域。
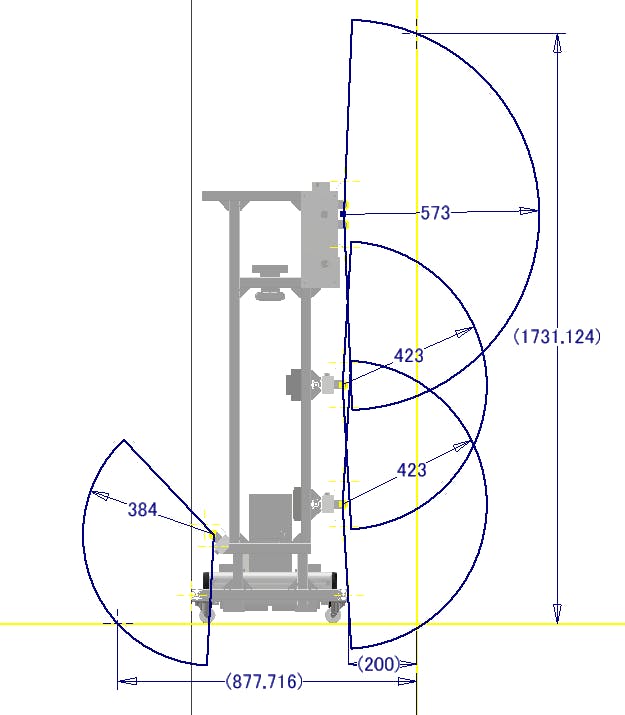
這些數字顯示了1 分鐘內的消毒區域。地板的寬度約為900 毫米。如果 Amabie 到墻壁的距離為 200 毫米,則紫外線燈管覆蓋1700 毫米高度。2、3型消毒區域對稱分布。關于UV光的軸向,消毒區域的寬度與燈的長度相同。
閾值 (TLV) 計算
由于紫外燈的波長為 253.7 nm,閾值限值 TLV_λ 等于 6 mJ/cm2。 [11] 因此,當 E_λ [mW/cm2] 是未過濾的輻照度 [11] 時,1m t_max [s] 處的最大曝光時間由該方程得出。t_max 的最小值為 43.8 秒。Amabie 的紫外線燈比其他紫外線機器人等高功率紫外線燈更安全。

上部設計
我們使用 30mm 方形鋁制框架作為 Amabie 的結構,因為它重量輕且易于使用。燈A轉軸的材質采用碳鋼S45C(JIS)。燈 A 由伺服電機 RS405CB (Futaba, 48kgf?cm) 通過同步帶傾斜。因為燈A的旋轉軸穿過重心,所以它可以以最小的扭矩旋轉。T_q=480x9.8=4704 [N?mm] 是扭矩,τ_a=94 [MPa] 是許用扭轉應力,M=3863 [N?mm] 是彎矩時,旋轉軸的直徑 d 由這些公式確定, σ_a=117 [MPa] 為許用彎曲應力。因此,直徑應大于 7mm,我們決定直徑等于 20mm 具有較高的安全余量。
4. 起落架
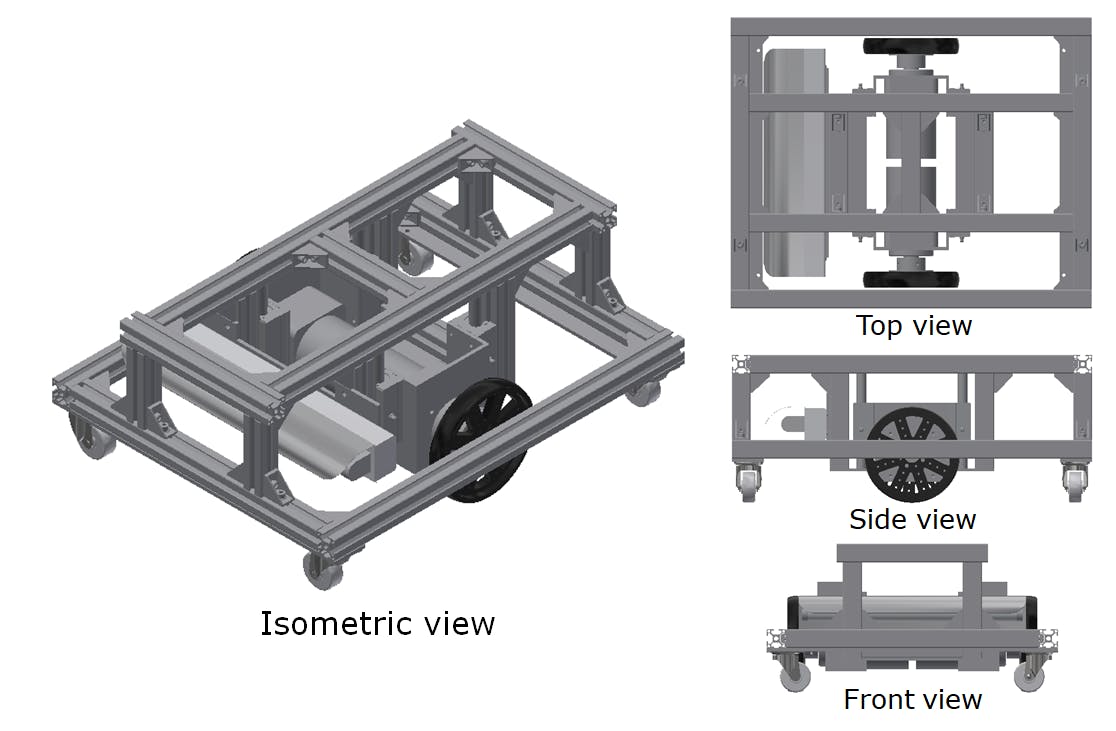
起落架是移動的一部分。尺寸為 W460×D570(mm)。它有 2 個驅動輪和 4 個腳輪。通過減少電機的數量,我們可以降低成本。起落架內的紫外線燈對地板進行消毒。當紫外線燈熄滅后,用戶可以通過取下蓋子來更換它。驅動輪具有懸架,因此用戶不介意在空中旋轉。為了爬過臺階,例如電纜,輪子和腳輪的直徑很大。
驅動輪
驅動輪是移動機器人的部件。主要部件是電機、懸架和車輪。然后,我描述了我選擇的產品。
電機為 MABUCHI MOTOR 制造的 MS-94BZB。懸架是 Accurate 制造的 P513。滑動襯套為 NIPPON BEARING 制造的 SME16GWUU。車輪是由 Actobotics 制造的 6 英寸重型模型。其他固定部件由 MISUMI 制造。
我們設計的起落架總重量假定為 100 公斤。它有 6 個接地點,因此驅動輪上加載的力為 166N,以免撞到地板。那么,懸架的強制力一定超過了 166N。懸架“P513”的允許載荷為103.2。它使用兩個懸架標準一驅動輪。
由于要爬過臺階,輪子的直徑是 6”。那么,啟動函數負載轉矩“ T_L ”為;
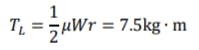
我們決定最大速度與人類步行速度相同,1m/s,加速周期為2s。采用梯形加速度,加速力矩為;
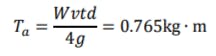
因此,電機需要超過 8.2 kg·m 的扭矩。MS-94BZB 的重量為 86 kg?m。因此,它符合要求。此外,我們優先考慮易于組裝。我們不想使用 Gearbox。那么,該電機輸出軸的徑向負載能力為 70 kgf。它符合要求。
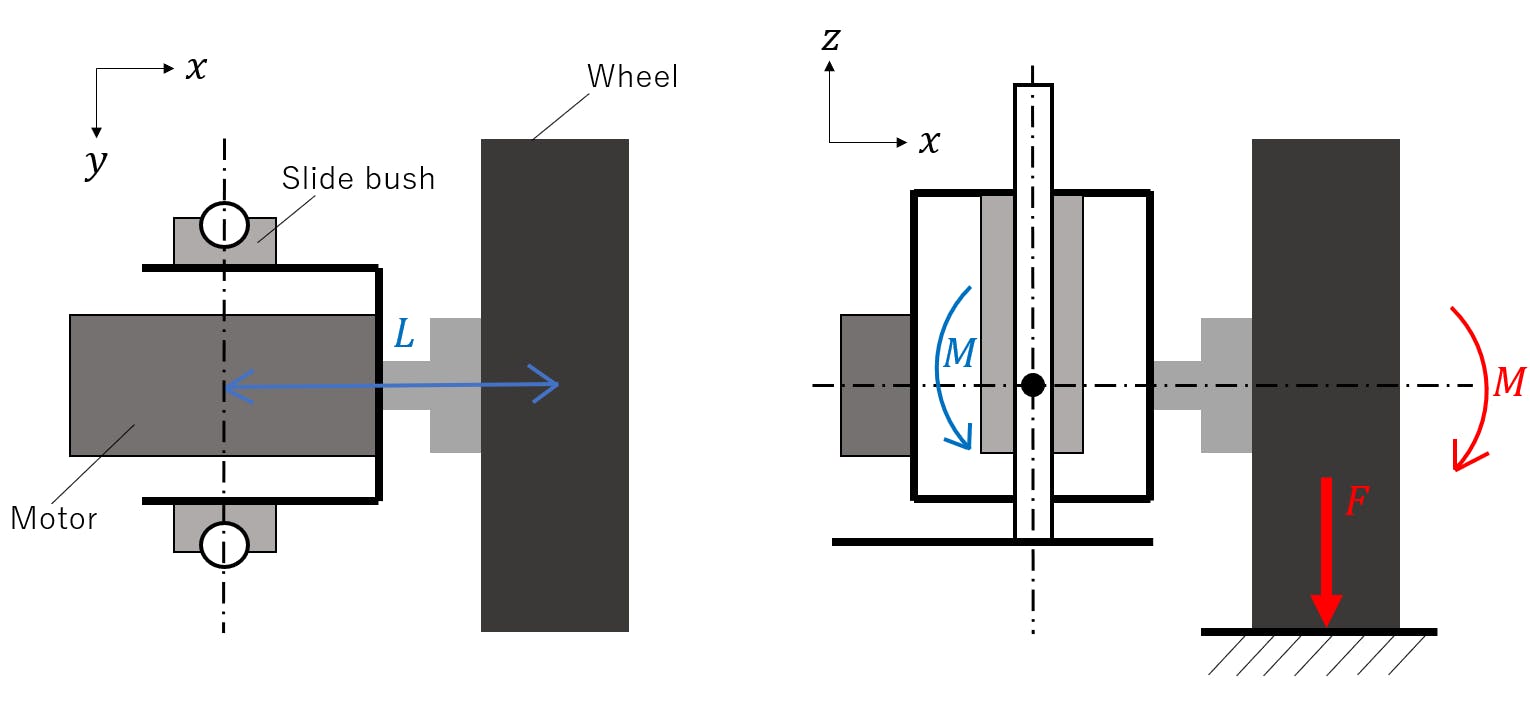
接下來,我們考慮了從地面加載的力產生的力矩。從地面受到的力與懸掛的力“206N”相同。由力“ F ”產生的力矩“ M ”加載在兩個滑動襯套上。因此,加載在一個滑動襯套上的力矩為 1/2 * M 。長度“ L ”為119.86mm。所以,1/2 * M是;
SME16GWUU 的允許靜力矩為 12600 N·mm。因此,它符合要求。
腳輪
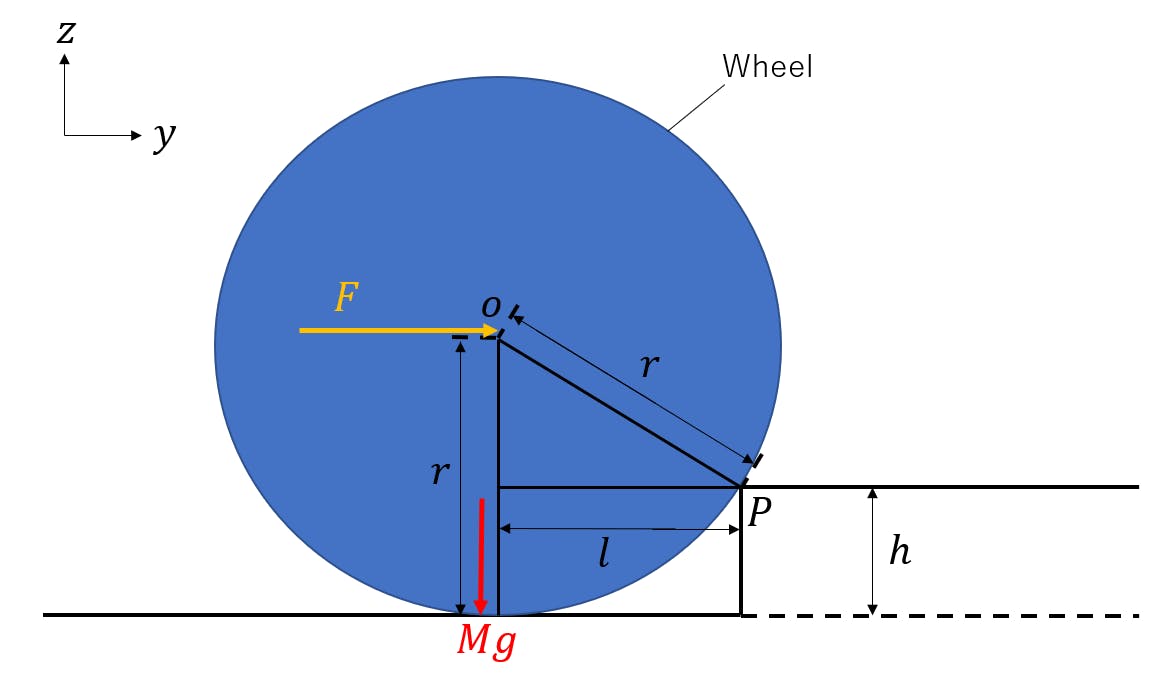
腳輪是TAKIGEN MFG.CO的K-420G-50N。由于允許載荷為372N,因此滿足要求。現在,我們要爬超過 100 毫米的臺階。爬過臺階所需的時間是M_P 。推動機器人產生的力矩“ F ”為M_F 。負載為 166N。所以,M_P是;

那么,M_F是;
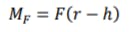
根據這個公式,amabie 可以通過推動 217N 的力爬上 10mm 的臺階。
5. 電路設計
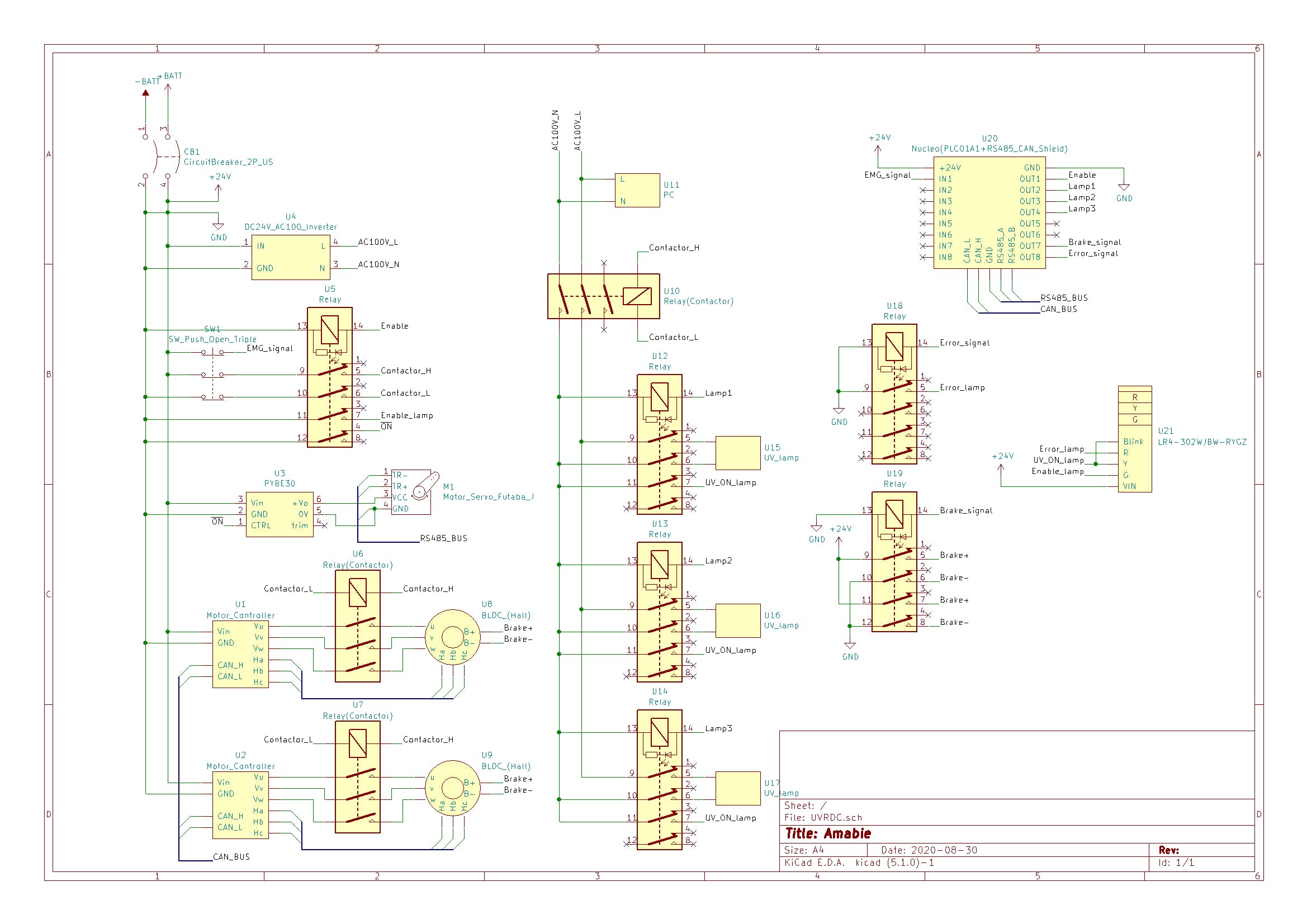
Amabie 有兩條電源線,一條 DC 24V 電源線和一條 AC 100V 電源線。DC 24V 電源由機器人內置的鉛酸電池提供,AC 100V 電源由機器人內部的 DC/AC 逆變器產生。DC 24V電源線驅動輪子電機、頂部UV燈的傾斜電機、MCU板和塔指示燈,AC 100V電源線驅動UV燈和主機。在緊急情況下,可以通過接觸器切斷提供給電機和紫外線燈的電流。
控制信號
Amabie 有兩個控制設備,一個主計算機和一個定制的微控制單元 (MCU) 板。計算機處理高級控制,例如 SLAM 和圖像傳感,而 MCU 板處理內部設備的控制,例如驅動電機、切換 UV 燈和接收開關信號。計算機和MCU板通過USB線通過串行通信發送和接收控制信號。電腦將運行狀態、輪轂電機轉速、UV燈開/關、UV燈傾斜角度等信息傳送至MCU板。MCU 板向計算機發送緊急停止信號。它還根據從計算機接收到的信號向車輪電機控制器和伺服電機發送旋轉指令,并向紫外線燈繼電器發送驅動信號。
成分
- 電池
Amabie 有兩節 12V 鉛酸電池。它們串聯并為電路提供 24V 電源。電池容量足以讓 Amabie 最大功率運行 2 小時。
- 斷路器 (CB1)
電池和 DC 24V 電源線通過斷路器連接。它具有短路時斷開電池和電路的作用,以及機器人主電源開關的作用。
- DC24V/AC100V逆變器(U4)
AC 100V 電源線由 DC/AC 逆變器從 DC 24V 電源線產生。逆變器可以輸出280W的功率,足以驅動15W的UV燈x10和一臺15W的電腦。
- 緊急停止按鈕(SW1、U5)
Amabie 配備了緊急停止按鈕。當按下該按鈕或來自 MCU 板的使能信號被切斷時,到接觸器的電信號被切斷。同時,DC/DC 轉換器也停止。
- 接觸器(U6、U7、U10)
車輪馬達和紫外線燈通過接觸器連接到電源。當按下緊急停止按鈕或來自 MCU 板的 Enable 信號被切斷時,接觸器會關閉這些電路。
- DC/DC 轉換器 (U3)
由于伺服電機的標稱電壓為 12V,DC/DC 轉換器將 24V 電源線降壓為 12V 并為伺服電機供電。
- 電機控制器(U1、U2)
該電機控制器為電機廠家正品,通過CAN信號接收指令。CAN 信號從 MCU 板傳輸。
- 伺服電機 (M1)
安裝用于改變紫外光方向的伺服電機通過 RS485 信號接收目標角度指令。RS485 信號由微機板傳輸。
- 紫外燈驅動繼電器(U12、U13、U14)
紫外線燈通過繼電器連接到 100V 電源線。繼電器由來自 MCU 板的信號打開/關閉。
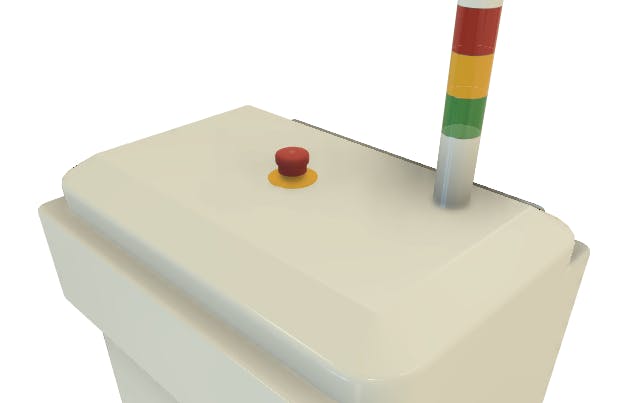
- 塔燈 (U21)
Amabie 配有塔式指示燈,可將機器人的運行狀態告知用戶。燈發出三種顏色。綠色:待機,黃色:運行,紅色:錯誤。請注意,黃色指示燈閃爍。
- 車輪制動器(U18、U19)
安裝在車輪電機上的電磁制動器用于使機器人緊急停止。全輪電機的制動器由來自 MCU 板的信號通過繼電器激活。
- 單片機(U20)
與主機通信并向各設備發送信號的MCU板支持與主機的串行通信、24V數字I/O、RS485通信、CAN通信。
六、安全措施
Amabie 具有緊急停止功能作為安全措施,以防人為錯誤或意外情況。當 Amabie 檢測到人為入侵或內部問題時,它會切斷供應給電動機和紫外線燈的電力并制動車輪電機,這意味著 Amabie 可以安全地停止運行。一旦 Amabie 執行緊急停止功能,程序會自動切換到緊急停止狀態。然后,除非重新啟動序列,否則它無法重新啟動。
緊急停止按鈕
如果用戶或其他人注意到自己的危險或工作機器人的異常,他們可以通過按下安裝在機身頂部的終止按鈕來安全地停止 Amabie 的操作。斷電按鈕向電路上的接觸器發出斷電信號,直接切斷電源,無需任何軟件。因此,即使軟件無法檢測到意外問題,您也可以安全地停止 Amabie 的操作。
斷路器
斷路器可以檢測電路上的過電流。如果發生短路,斷路器會切斷電池下方的所有電源線。因此,斷路器避免了異常發熱和火災。
人體檢測
安裝在身體前上方的 3D 攝像頭可以檢測到人的存在。如果有人進入正在運行的 Amabie 面前,攝像頭會檢測到并立即停止 Amabie 的操作。檢測算法的細節在軟件部分。
電池觀察員
如果在操作過程中電池電量耗盡,Amabie 可能會執行意外行為。電池觀察器在操作期間始終監控電池的電壓。如果觀察者判斷剩余電池電量過低,Amabie 會在電池電量耗盡之前安全停止。
人體進入感應信標
人員進入感應信標是用于擴展安全性的外部附件。信標由用戶附在房間門附近的墻上,它監視通過門進入房間的人。它包含一個超聲波距離傳感器和一個藍牙模塊,并使用電池工作。尺寸非常小,L:60mm,W:60mm,H:25mm。如果有人在 Amabie 操作期間進入房間,信標會檢測到它并將通知發送給 Amabie。收到它,阿瑪比立即安全地停止了操作。
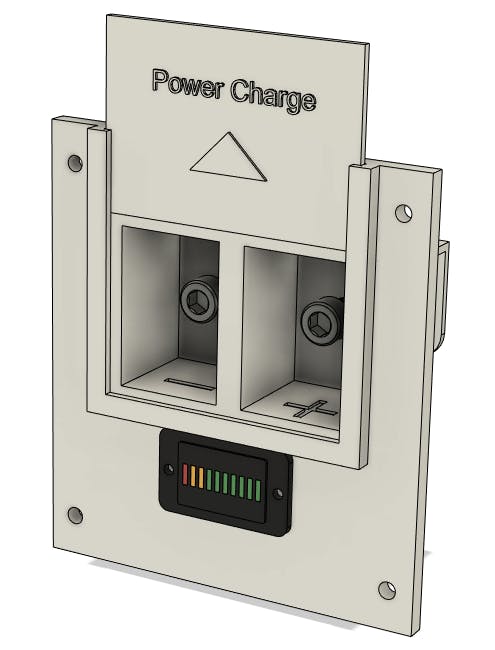
充電
在啟動 Amabie 之前,請確保電池已充電。您可以通過機身背面下方的充電端口檢查電池電量。如果指示燈未充滿,則需要在啟動前給電池充電。您可以使用 24V 鉛酸電池的通用電池充電器為機器人電池充電。向上滑動充電口蓋,按照充電口上的 +/- 標記裝上充電器插頭。充電器的使用方法請參閱各產品的使用說明書。
7. 軟件
概述
Amabie軟件是分布式的:有兩個核心計算單元,即主計算機和MCU板。前者主要負責圖像處理和決策;后者與模塊通信并處理信號。
計算機
Amabie 的主計算機是 Jetson Xavier NX,它擁有高性能的節能 GPU。Ubuntu 18.04 LTS Bionic Beaver 安裝為操作系統。在計算機上運行的所有實施軟件均基于機器人操作系統 (ROS) Melodic Morenia,這是最流行的機器人平臺。
單片機
Amabie上的MCU板是由STM32 Nucleo Board STM32F303RE(STMicroelectronics)、X-NUCLEO-PLC01A1(STMicroelectronics)和RS485 CAN Shield(Waveshare)組成的原創定制板。固件是在 Mbed 環境中實現的。該程序被描述為使Amabie的每個組件抽象并實現了可擴展性。程序的結構如圖所示。
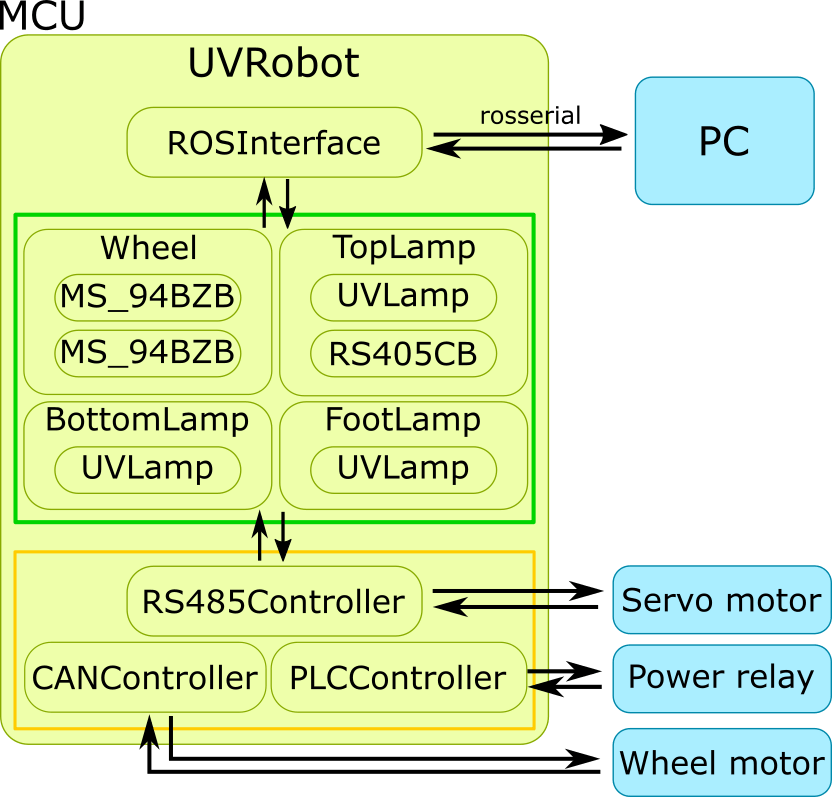
Amabie 的所有組件(例如輪子和紫外線燈)都被描述為類。此外,該程序還有一個用于發送和接收命令信號的類。支持的通信是使用rosserial 協議的串行通信、RS485 通信和CAN 通信。并且板子每個都有8ch 24V 數字PLC I/O 端口。
相機
Amabie 有四個攝像頭:三個 Intel RealSense d435 RGB-D 攝像頭和一個 Intel RealSense T265 跟蹤攝像頭。RGB-D相機可以拍攝深度照片;換句話說,它們不僅可以用作相機,還可以用作 LiDAR 傳感器。兩個 RGB-D 攝像頭安裝在前下方和后下方,以檢測 Amabie 必須避開的障礙物。另一個 RGB-D 攝像頭和跟蹤攝像頭安裝在前上方。所有相機都通過高速 USB 3.1 電纜連接到主計算機。
基于 ROS 的軟件
由于 ROS 被設計為一個分布式計算平臺,每個軟件都作為一個節點獨立運行。主要節點描述如下。
- V-SLAM:同步定位和建圖 (SLAM) 是自主機器人必不可少的技術。由于小型機構有很多可移動的物體,例如椅子和玩具,2D(平面)SLAM 算法可能會因為它們的不確定性而失敗。里面需要3D SLAM。另一方面,3D LiDAR 傳感器通常非常昂貴。相反,我們使用視覺 SLAM (V-SLAM),基于相機的 SLAM 算法。Amabie 并行使用兩種不同的算法。一個在跟蹤相機上運行以估計局部位移 [12],另一個在計算機上運行以創建地圖并估計全局位置 [13]。
- 自動駕駛:完全自動駕駛和消毒仍然是困難的技術。我們建議模仿來實現它。用戶購買 Amabie 后,他/她將其控制為無線電遙控車,并教他們希望它重播的路徑和消毒目標。在這個術語中,Amabie 在記住地圖的同時創建地圖。當 Amabie 自動駕駛時,它會跟隨路徑并對目標進行消毒。如果路上有障礙物,Amabie 會嘗試避開它們。
模擬
盡管由于大流行導致大學停課,我們無法構建真正的原型,但我們使用 Choreonoid [14] 開發了一個模擬環境。由于 Choreonoid 支持光模擬作為以下快照,我們可以評估 Amabie 可以照亮的消毒區域
?
- 電暈消毒紫外線機器人開源分享
- 消毒機器人Hanth-x1開源分享
- 使用UVC和垃圾場材料的自主消毒機器人
- Pinaka:UVD(紫外線消毒)機器人開源分享
- LIDIA光消毒機開源分享
- UV-C消毒機器人開源分享
- 全自動UV-C消毒機器人開源分享
- 紫外線消毒機器人
- 消毒機器人開源項目
- Roboboi智能紫外線消毒機器人
- 自主UVC消毒機器人開源
- 低成本機器人消毒系統開源分享
- 紫外線燈消毒機器人開源分享
- 自動地板消毒機器人
- 瞳步消毒機器人方案
- 字節發布機器人領域首個開源視覺-語言操作大模型,激發開源VLMs更大潛能 360次閱讀
- 機器人技術中常用的路徑規劃算法的開源庫 843次閱讀
- 鑄造機器人是什么?選擇工業機器人應該考慮的方向 1137次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotSparki機器人套裝簡介 2064次閱讀
- 工業機器人技術應用 5176次閱讀
- 工業機器人編程入門_工業機器人的編程要求 9571次閱讀
- 醫用機器人的定義_醫用機器人發展 3122次閱讀
- 醫用機器人的功能_醫用機器人分類 2227次閱讀
- 機器人控制器有哪些類型_機器人控制器發展 1.1w次閱讀
- 協作機器人的起源_為什么需要協作機器人 8127次閱讀
- 機器視覺的機器人取代四臺傳統的火焰處理機器人 3270次閱讀
- 如何區分機器人、協作機器人和移動機器人? 6828次閱讀
- 軟體機器人 前所未見的機器人 3692次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.4w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論