 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
概念
在大流行期間,消毒對于防止病毒傳播非常重要。它直接或間接地影響了我們生活的方方面面。在醫院、購物區等擁擠的區域,消毒非常困難。因此,在這種情況下,低成本和可持續的解決方案更容易被接受。
這種疾病是通過細菌和病毒等生物有機體傳播的。眾所周知的事實是,這些生物體在暴露于紫外線時會變得不活躍。特別是在這次大流行中,UV-C 射線是根除那些破壞性生物的非常有效的方法。但是這些射線落在人體上也是非常危險的。
這就是為什么機器人在這種情況下很重要。機器人用于人類可能面臨暴露風險的許多應用中。機器人能夠以非常精確、清晰和一致的方式執行日常任務,只需很少或無需人工協助。
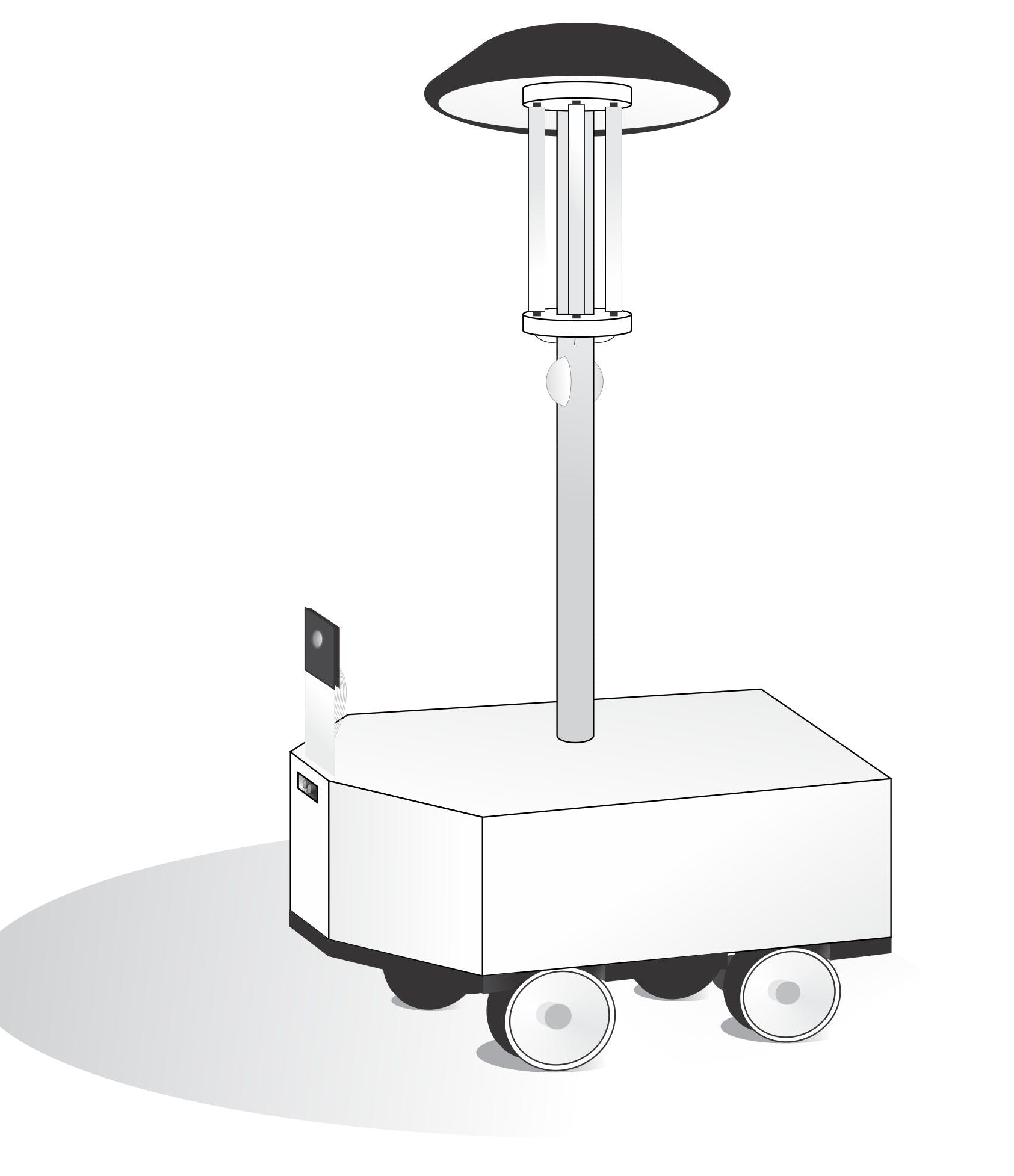
在這里,我們正在創建稱為紫外線消毒機器人的機器人。這種遙控機器人還包含額外的安全功能,如避免碰撞和人體暴露。這個機器人長1.5米。
紫外線消毒機器人
這里是我們的設計。
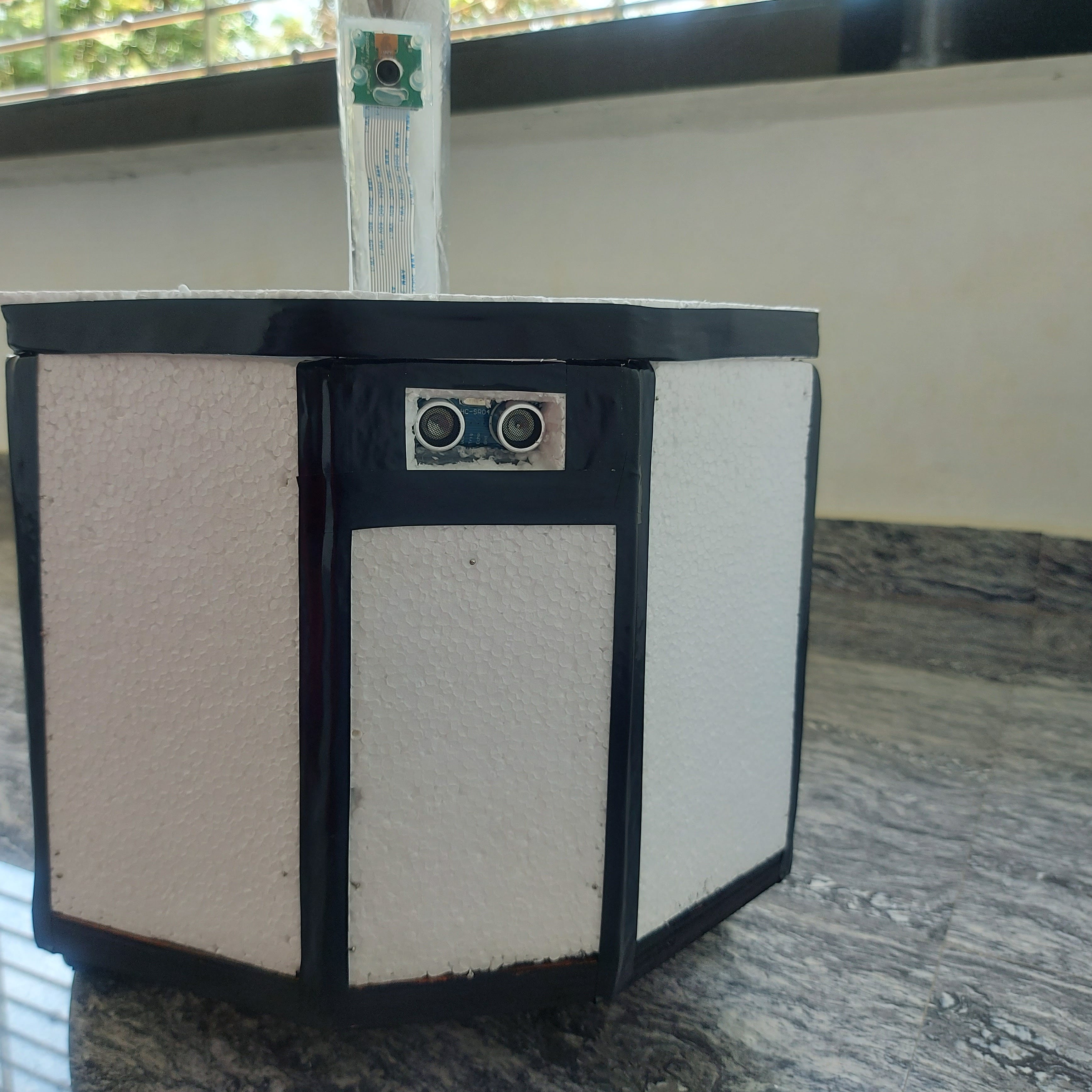
這里有一些關于機器人的照片。



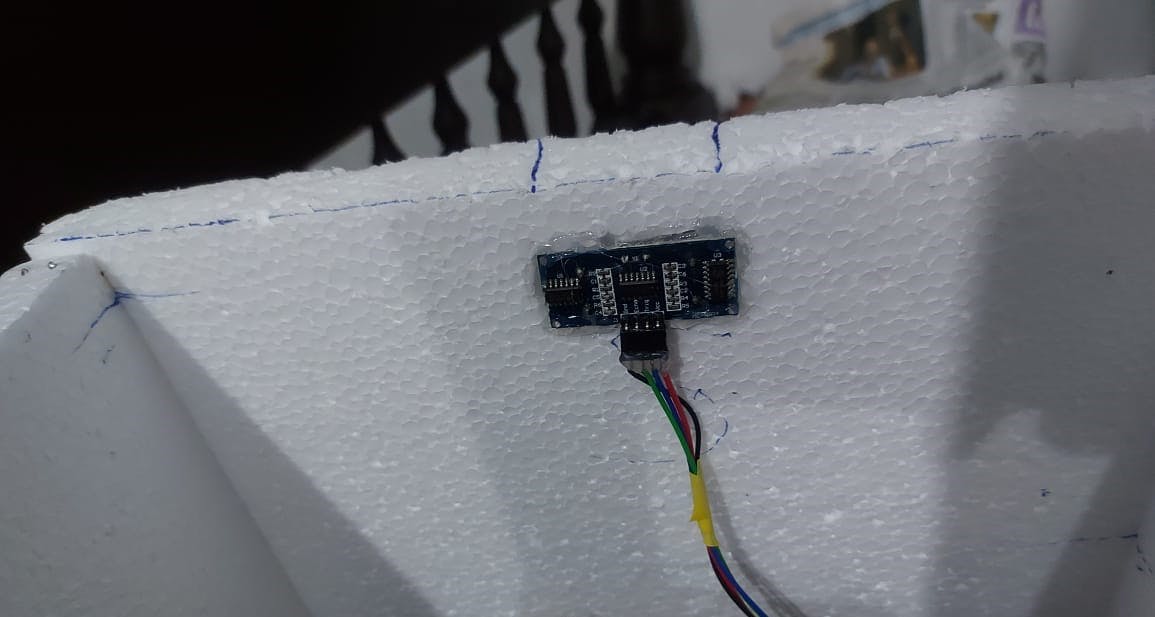
防撞(超聲波傳感器)和攝像頭
?

在這里,我們的遙控消毒機器人在工作。當檢測到人體暴露時,它會自動關閉紫外線燈。紫外線燈可以手動控制。
到達消毒地點時應開啟。如果在操作過程中檢測到有人存在,它將自行關閉。它必須手動打開才能再次工作。當機器人開始移動時,它會檢測到前方 30 厘米的障礙物并停在那里并發出警報。如果我們看到它前面有障礙物并試圖將其向前移動,它就會停下來。
這里是相機的意見
第 1 步:構建 UV 機器人
- 步驟 1.1:電機和框架
我們使用 4 Geared DC 12v 電機 100rpm,它具有高扭矩。電機安裝在膠合板上。電機用夾子和螺絲安裝好
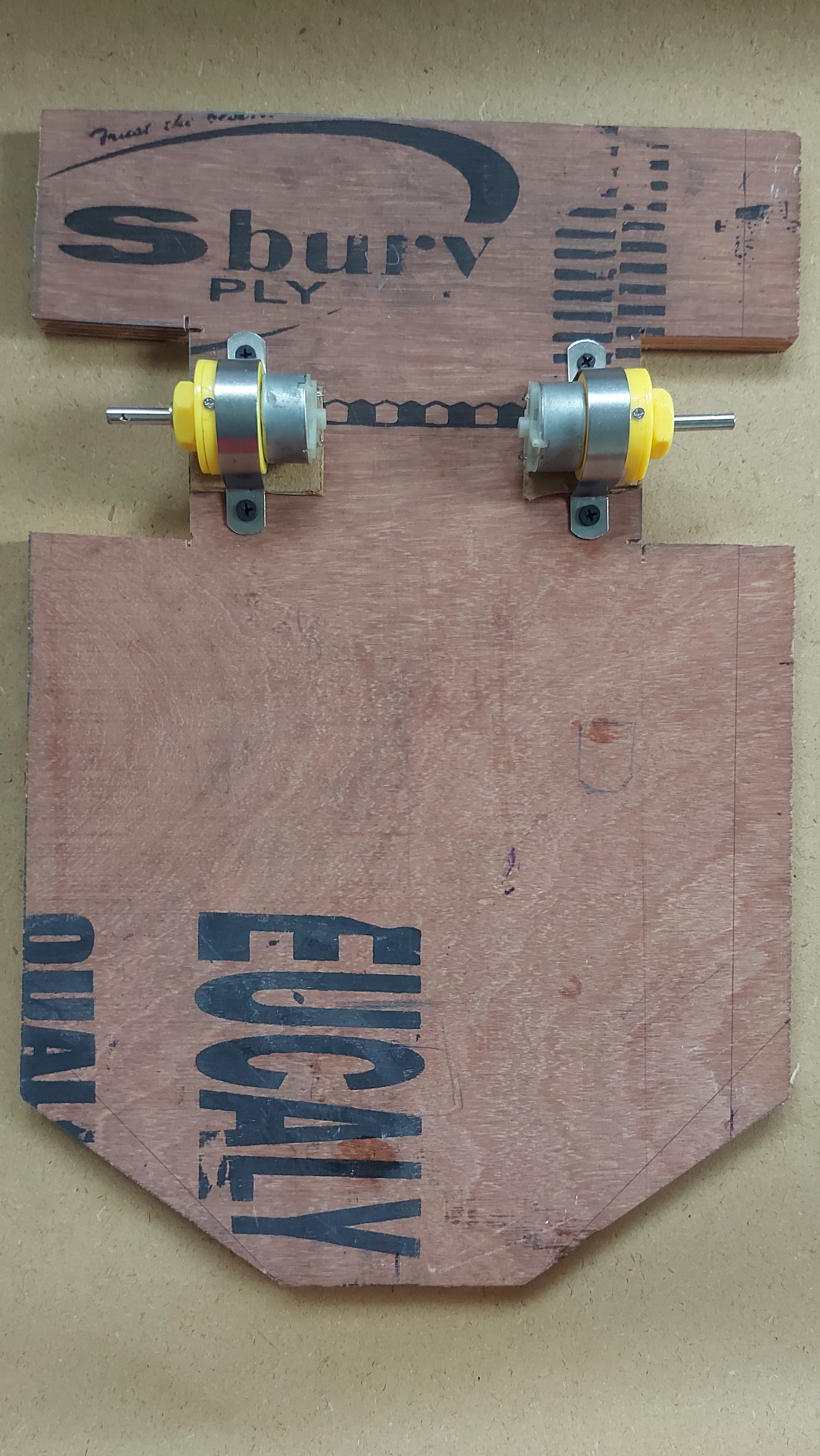
膠合板是該機器人的堅硬且良好的基材。它的尺寸是30cmx45cm。正面為半六邊形,兩側為12cm,正面為9cm。
先只裝兩臺電機,待紫外燈架完成后再裝另一臺電機。
然后按照上述方法將熱管切割成正確的尺寸,下圖是機器人的前部。

然后將切好的碎片放在膠合板上。

- 步驟 1.2:紫外線燈安裝
UV燈架由長1.5m、直徑50mm的PVC管制成。

管子的底部有一塊小膠合板被擰緊。

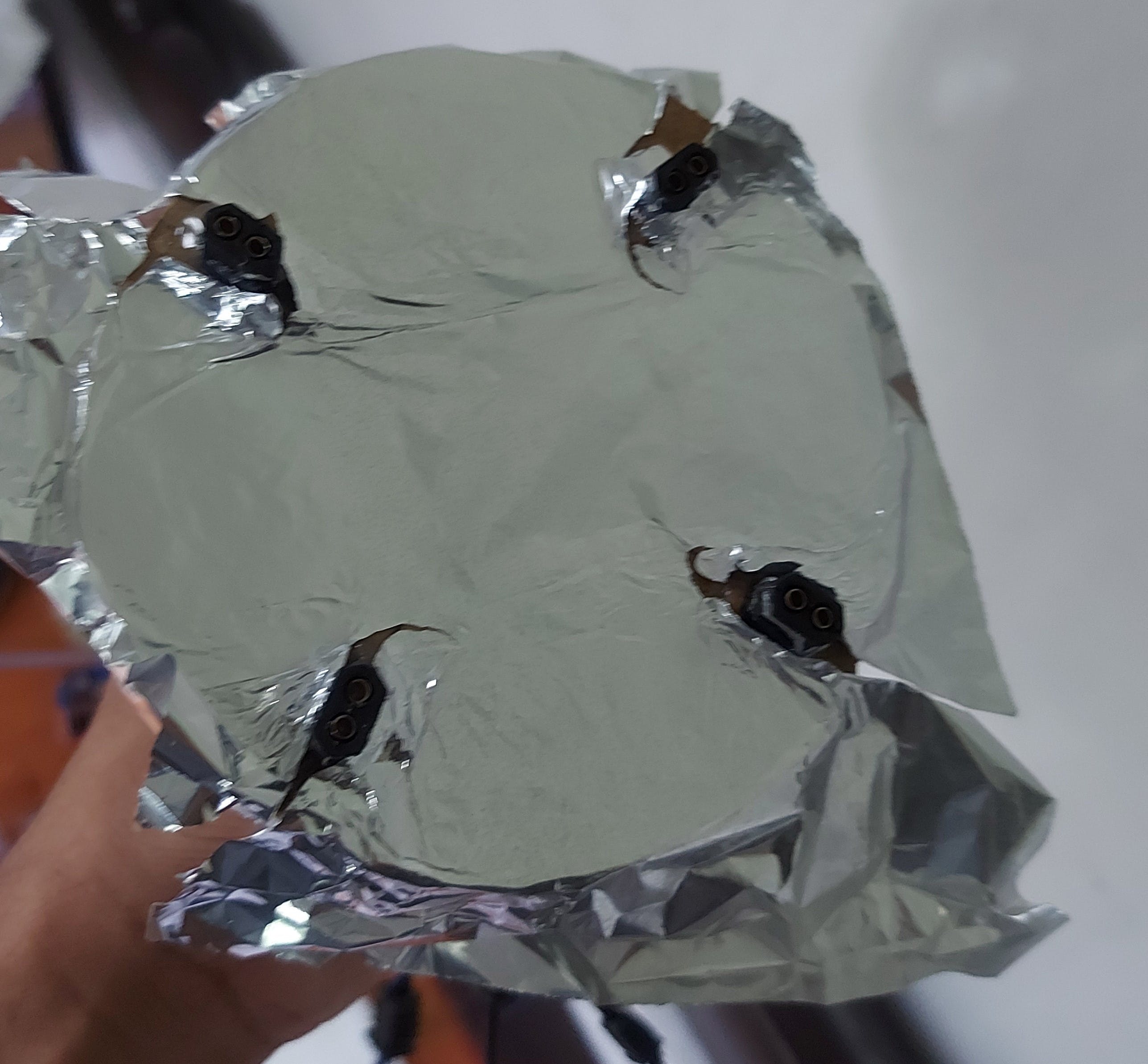
我們使用 4 根紫外線管,當機器人移動時,我們需要將紫外線照射到更廣泛的區域和地板上進行消毒。所以我們可以使用鋁箔來散光,并在PVC管周圍放置4個UV管。
然后我們必須用鋁箔層壓PVC管。所以紫外線是反射的,我們可以對大范圍進行消毒。

UV管需要燈座來固定pvc管的周圍。我們需要一個重量輕的支架。所以它是用 thermocol 和厚紙制成的。為了放置 pvc 管周圍的管子,我們需要將 thermocol 切割成圓形。

支架的中心部分是thermocol,另外兩側是厚紙片,還貼有鋁箔。

為了給地板消毒,我們需要在機器人的頂部做一個反射器,所以我們做了一個傘形的反射器。



- 步驟 1.3:安全功能
然后我們需要訪問一個安全功能,即人體檢測,當檢測到生物的運動時它會中斷紫外線并防止危險的紫外線。
人體暴露
我們為此安全功能添加了兩個 PIR 傳感器。該傳感器具有 7 米距離的 360 度覆蓋范圍。它安裝在正面和背面。


小盒子是紫外線管驅動器。它適用于230v。
機器人碰撞
我們為此功能添加了兩個超聲波傳感器,一個安裝在背面,另一個安裝在前面。當機器人遇到 30 厘米外的障礙物時,它會檢測到并停止并發出警報。
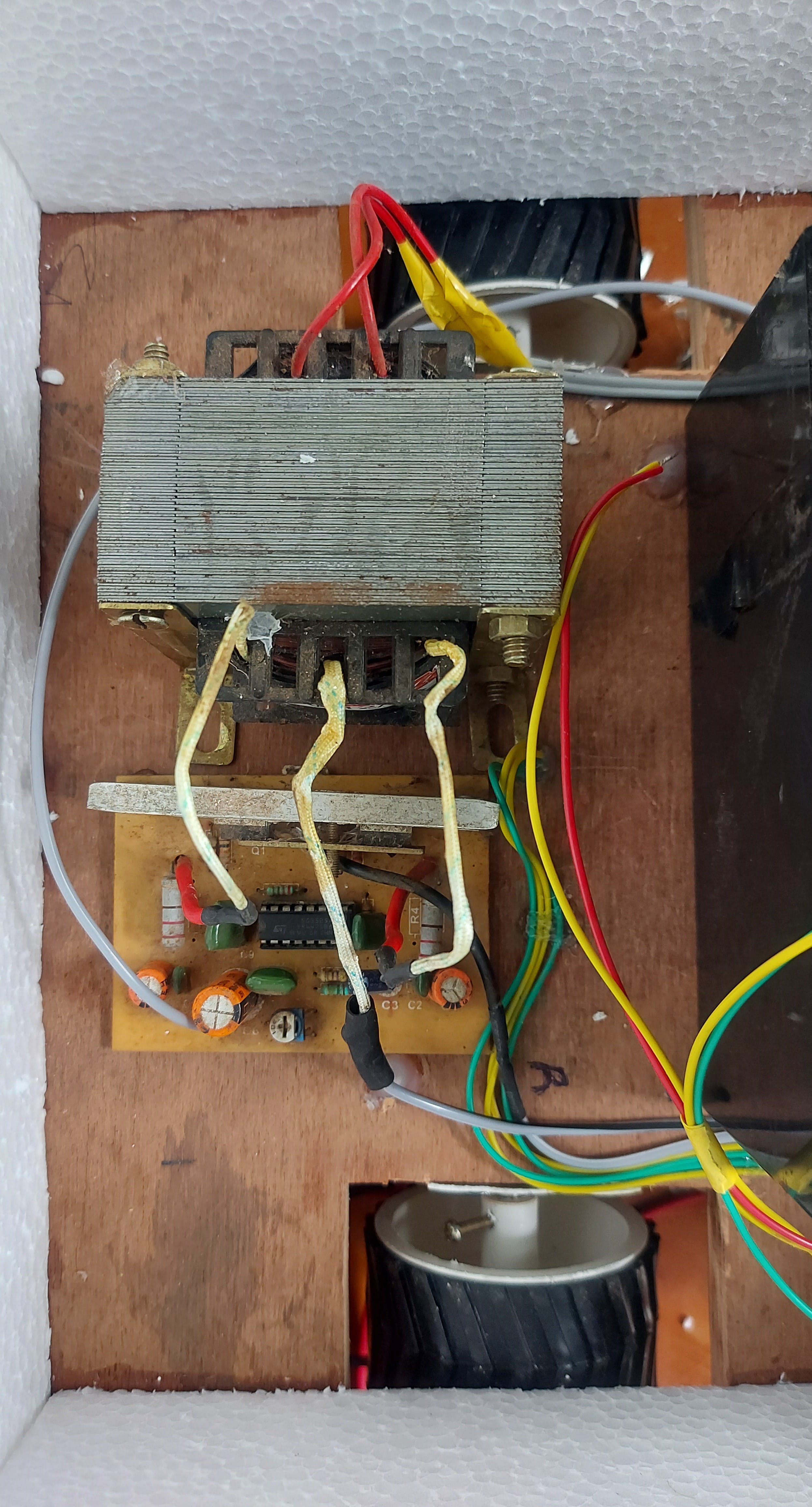
- 步驟 1.4:電子產品
我們需要為紫外線燈提供 230v,我們使用了 150w 逆變器
?
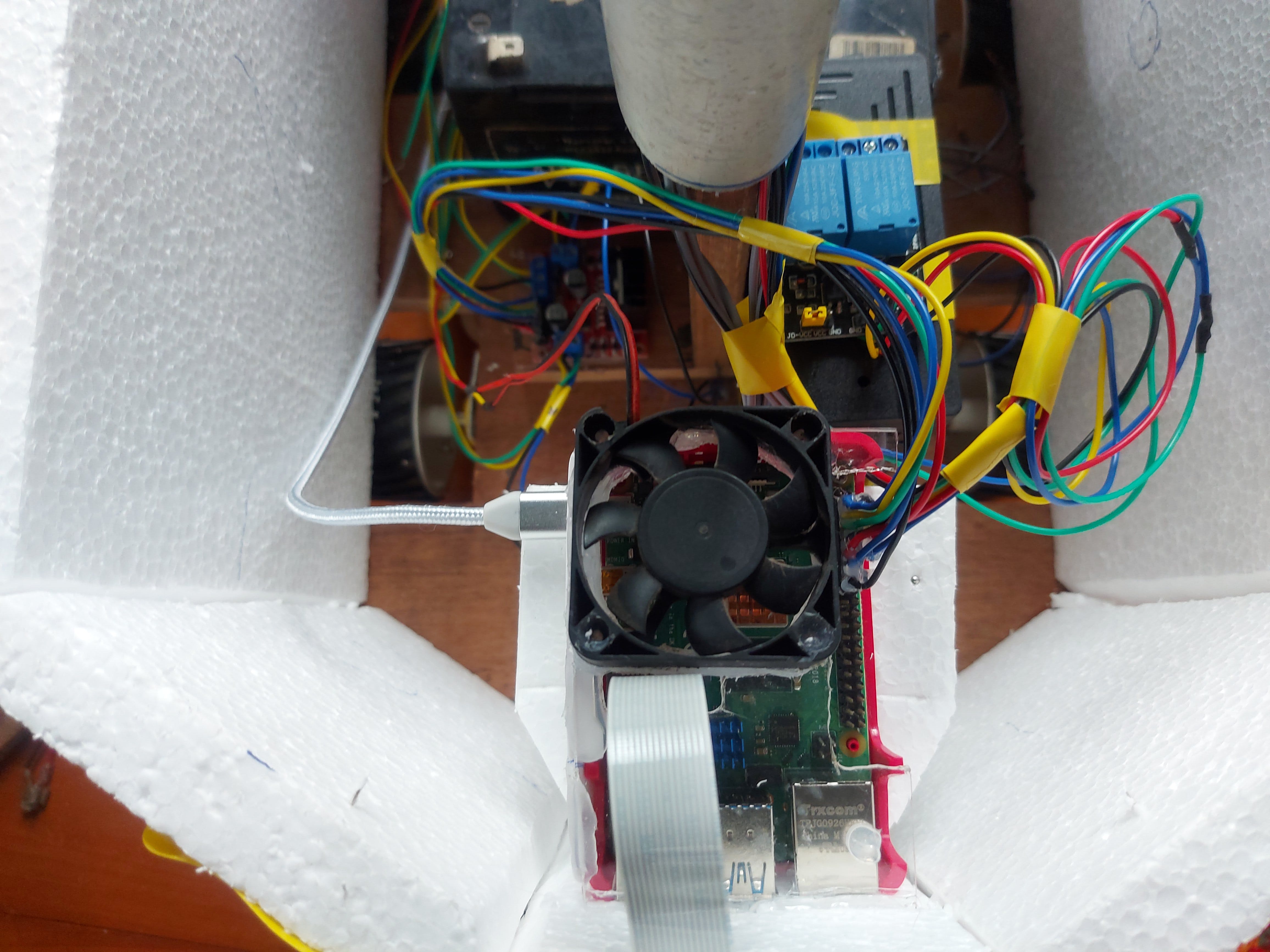
第 2 步:編碼
你必須使用樹莓派來控制這個機器人。這個項目是用樹莓派4做的。它連接互聯網,通過互聯網控制,你可以監控機器人移動時的攝像頭視圖,還可以控制紫外線燈。
當機器人移動并手動打開紫外線燈時,突然檢測到任何移動時,它會檢測并自動關閉紫外線燈并發出警報。當機器人開始移動時,它將檢測到前方30cm的障礙物并停在那里并發出聲音警報。
在這里,我們使用鍵盤來控制機器人,當按下箭頭鍵時,它會相應地移動并在按下“Q”和“W”時控制紫外線 - 開和關。您還可以通過更改編碼來更改密鑰。
- 步驟 2.1:設置樹莓派
首先,您需要安裝最新版本的 Raspbian。我建議從樹莓派下載帶有桌面和推薦軟件的最新版本。
您必須下載該軟件并將其安裝到帶有 pi imager 軟件的 SD 卡中。然后你連接顯示器,鍵盤,鼠標并啟動它
安裝操作系統后,更容易訪問VNC、CAMERA。
要啟用 VNC 和相機,請按照以下步驟操作,
選擇 Menu > Preferences > Raspberry Pi Configuration > Interfaces 并確保 VNC 已啟用以及攝像頭
僅通過啟用 VNC 不會顯示相機預覽,您將轉到 VNC 設置
單擊 VNC 圖標 > 菜單 > 選項 > 故障排除 > 啟用直接捕獲模式并應用設置
- 步驟 2.2:安裝庫
導入庫以向此代碼添加特殊功能。
要安裝庫,請打開終端
首先我們需要pygame庫來獲取控制機器人的鑰匙
sudo apt-get install python-pygame
用于導入庫
import pygame
其他庫是內置的庫。所以我們不需要安裝。
- 步驟 2.3:按鍵
使用pygame庫導入此項目用于控制機器人的鍵盤鍵。首先導入pygame庫
import pygame
初始化一個窗口
pygame.init()
pygame.display.set_mode((100,100))
創建一個從鍵盤獲取鍵的函數
def getKey(keyName):
ans = False
for eve in pygame.event.get():pass
keyInput = pygame.key.get_pressed()
myKey = getattr(pygame,'K_{}'.format(keyName))
if keyInput [myKey]:
ans = True
pygame.display.update()
return ans
- 步驟 2.4:相機
之前啟用了相機。我們必須得到預覽
from picamera import PiCamera
from time import sleep
def piCam(w=200,h=100,x=0,y=0,fill=True):
camera = PiCamera()
camera.resolution = (w,h)
camera.start_preview(fullscreen= fill,window=(x,y,w,h))
- 步驟 2.4:電機、pir、超聲波傳感器和控制紫外線
電機驅動器、超聲波傳感器、pir 傳感器和繼電器端子連接到樹莓派 GPIO 引腳
電機驅動器有 6 個引腳,三個引腳連接電機 1,三個引腳連接電機 2。兩個使能引腳或 PWM 引腳,另一個引腳是每個兩個電機的方向控制引腳。
對于前進方向
GPIO.output(In1A,GPIO.HIGH) # motor1 forward
GPIO.output(In2A,GPIO.LOW)
GPIO.output(In1B,GPIO.HIGH) # motor2 forward
GPIO.output(In2B,GPIO.LOW)
對于反向
GPIO.output(In1A,GPIO.LOW) # motor2 backward
GPIO.output(In2A,GPIO.HIGH)
GPIO.output(In1B,GPIO.LOW) # motor2 backward
GPIO.output(In2B,GPIO.HIGH)
設置脈寬調制
pwmA = GPIO.PWM(EnaA,100)
pwmA.start(0)
pwmB = GPIO.PWM(EnaB,100)
pwmB.start(0)
為了轉動機器人,改變占空比,我們可以轉動機器人。
添加 PIR 傳感器以檢測人體暴露。這里的代碼
if GPIO.input(pir1): # pir1 is defined as pir1 = 18
print(" Detected ")
超聲波傳感器有 2 針 ECHO 和 TRIGGER(不包括 VCC、GND)
基本的距離測量是測量觸發和回波之間的時間。我們可以用代碼來測量時間
GPIO.output(TRIG, True)
time.sleep(0.00001)
GPIO.output(TRIG, False)
while GPIO.input(ECHO)==0:
GPIO.output(led, False)
pulse_start = time.time()
while GPIO.input(ECHO)==1:
#Check whether the ECHO is HIGH
GPIO.output(led, False)
pulse_end = time.time()
pulse_duration = pulse_end - pulse_start
distance = pulse_duration * 17150
distance = round(distance,2)
measuredDistance=measuredDistance+distance
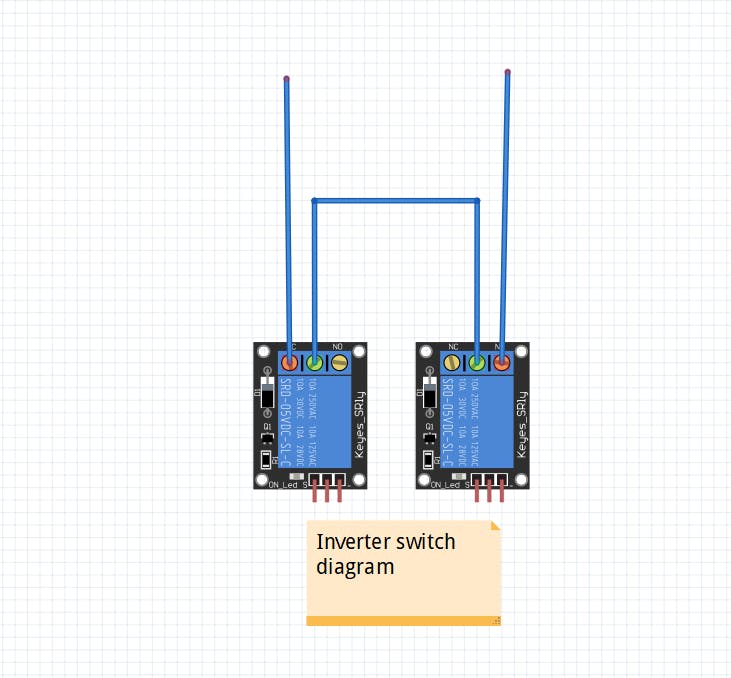
為了控制紫外線燈,請使用 2 通道繼電器。
if getKey('q'): #for on
GPIO.output(Relay1,GPIO.LOW) # uv light on
elif getKey('w'): #for off
GPIO.output(Relay1,GPIO.HIGH) #uv light off
完成。然后運行。
結論
這種機器人可以用紫外線對大范圍的區域進行消毒。在這種情況下,這種機器人對于醫院、商場和其他人聚集的區域非常有用。
我們現在已經把這個機器人做成了可以遠程控制的方式,如果我們使用激光雷達,我們可以自動控制這個機器人不受遠程控制,減少超聲波傳感器的使用。它會更加準確和高效。然后我們安裝了不可移動相機而不是移動相機,我們可以使用伺服電機將不可移動相機變成可移動相機。我們用了一個小的紫外線管,如果我們用一個大的紫外線管,照明率會提高,對大面積的消毒效率會更高。在使用大紫外線管時,我們需要更換逆變器。
COVID-19讓全球數十億人感到恐懼,所以我們打造了這樣一款低成本的消毒機器人,唯一的目的就是參與抗擊疫情。這款機器人擁有無限的未來可能性。我們希望您能夠以最有效的方式使用它。
謝謝閱讀!
- 電暈消毒紫外線機器人開源分享
- Pinaka:UVD(紫外線消毒)機器人開源分享
- XentrinoBot UVR2(紫外線機器人)開源
- 防紫外線機器人開源分享
- 便攜式紫外線消毒器 1次下載
- 消毒機器人開源項目
- Roboboi智能紫外線消毒機器人
- 紫外線機器人開源分享
- Amabie消毒機器人開源分享
- 用于滅活生物有機體的紫外線機器人
- 自主紫外線機器人
- 紫外線燈消毒機器人開源分享
- 紫外線機器人(Covid 戰士)
- 瞳步消毒機器人方案
- 紫外線殺菌消毒燈管專用照度計UVC254說明書 2次下載
- 紅外線紫外線的特點及應用有哪些 293次閱讀
- 基于Arduino的紫外線傳感器設計 紫外線傳感器的工作原理和分類 671次閱讀
- 如何使用LED進行消毒殺菌 4364次閱讀
- 詳談智能手表/手環里的紫外線傳感器的作用 5224次閱讀
- 紫外線對三大類材料的降解原理及如何預防或減輕紫外線的降解 1.2w次閱讀
- 面對疫情 醫療機器人能幫上什么忙? 2126次閱讀
- dfrobotGUVA-S10GD UV紫外線傳感器簡介 1969次閱讀
- 紫外線殺菌消毒的原理以及在消毒器中的應用 1892次閱讀
- 紫外線傳感器在皮膚醫療領域中的應用 752次閱讀
- 紫外線傳感器殺菌消毒原理解析 3886次閱讀
- 紫外線殺菌燈殺菌原理和特點 5.1w次閱讀
- 數字式紫外線傳感器產品說明和應用 1426次閱讀
- 針對紫外線的四個波段,應用對應波段的紫外線傳感器分析 5584次閱讀
- 紫外線治療儀與紫外線波段之間的關系解析 5053次閱讀
- 紫外線傳感器電路 7759次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論